Geometric Trajectory Optimization for TRACON Arrivals: An NLP Approach with ATC Vectoring Maneuver Modeling
Pith reviewed 2026-05-10 04:07 UTC · model grok-4.3
The pith
A single-stage NLP with closed-form geometric coupling optimizes baseleg extensions and speed profiles to produce separated, controller-aligned arrival trajectories under FCFS.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Under the First-Come-First-Served rule, the NLP model generates operationally feasible, separated trajectories aligned with controller practice by optimizing baseleg extensions and speed profiles subject to closed-form nonlinear geometric coupling between baseleg length and the radius-to-fix turn needed for FAF intercept; Monte Carlo runs demonstrate that separation violations stay minimal below the maximum tolerable arrival rate and occur only when demand exceeds capacity.
What carries the argument
The single-stage NLP that optimizes baseleg path extension and segment-wise speed profiles while enforcing closed-form nonlinear geometric coupling between baseleg extensions and radius-to-fix turns to ensure final approach fix intercept.
If this is right
- Generates separated trajectories that align with how controllers actually vector aircraft in terminal airspace.
- Tactical path stretching maintains separation with minimal violations when arrival rates stay below runway capacity.
- Violations appear only when demand exceeds the maximum tolerable rate.
- Improves scheduling accuracy over node-link models by respecting actual airspace geometric constraints.
Where Pith is reading between the lines
- This optimization could be embedded in real-time decision support tools to produce schedules that controllers can execute with little additional adjustment.
- Applying the same geometric coupling to other TRACONs might reveal airport-specific capacity thresholds under FCFS sequencing.
- Comparing the model's output trajectories directly against recorded radar tracks would provide a concrete test of how well the closed-form expressions match observed vectoring.
Load-bearing premise
The closed-form nonlinear geometric coupling between baseleg extensions and radius-to-fix turns is assumed to accurately capture real ATC vectoring practice so that the optimized trajectories need no further controller intervention.
What would settle it
Real-world flight track data from the A80 TRACON showing frequent controller-issued vectors that deviate from the model's predicted baseleg lengths and RF turn radii would falsify the claim that the geometric coupling fully represents operational practice.
Figures




read the original abstract
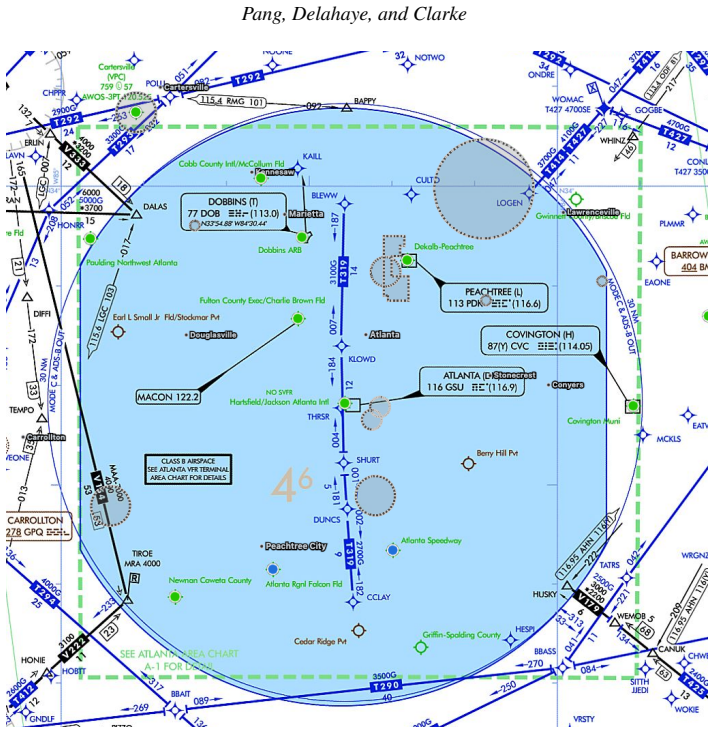
Terminal airspace congestion remains a major bottleneck in the global air traffic network. Although the Aircraft Sequencing and Scheduling Problem (ASSP) has been widely studied, many methods rely on simplified node-link abstractions that ignore the practical flight path, producing schedules that can be hard to execute under real airspace geometric constraints. This paper introduces a high-fidelity trajectory optimization framework for Terminal Arrival Sequencing and Scheduling (TASS) that explicitly models controller vectoring maneuvers. We formulate a single-stage nonlinear programming (NLP) model with a weighted objective function that optimizes Baseleg path extension and segment-wise speed profiles for arriving aircraft. The model enforces nonlinear geometric coupling between Baseleg extensions and the required Radius-to-Fix (RF) turn for Final Approach Fix (FAF) intercept through closed-form expressions. Under the First-Come-First-Served (FCFS) rule, it generates separated, operationally feasible trajectories aligned with controller practice. Monte Carlo simulations with ample runs on the A80 TRACON in Atlanta demonstrate minimal separation violations below the runway capacity threshold through tactical path stretching, with violations occurring only when arrival rates exceed the maximum tolerable rate.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a single-stage nonlinear programming (NLP) formulation for Terminal Arrival Sequencing and Scheduling (TASS) that optimizes baseleg path extensions and segment-wise speed profiles while enforcing closed-form nonlinear geometric couplings between baseleg extensions and radius-to-fix (RF) turns for FAF intercept. Under a first-come-first-served (FCFS) rule, the model produces separated, geometrically feasible trajectories aligned with ATC vectoring practice; Monte Carlo simulations on the A80 TRACON demonstrate that separation violations remain minimal when arrival rates stay below runway capacity, with violations appearing only at higher rates.
Significance. If the closed-form couplings prove accurate and the NLP reliably yields executable trajectories, the work would advance ASSP methods by replacing node-link abstractions with high-fidelity geometric constraints, enabling schedules that controllers can issue directly via standard vectoring maneuvers.
major comments (3)
- [NLP formulation and geometric coupling description] The abstract and NLP model section present the 'closed-form nonlinear geometric coupling' between baseleg extensions and RF turns as sufficient to capture ATC practice without residual conflicts, yet no explicit formulas, derivation steps, or error bounds are supplied; this is load-bearing because the central claim of operational feasibility under FCFS with only the modeled maneuvers rests on these expressions being exact under the idealized geometry assumed.
- [Monte Carlo simulations section] The Monte Carlo simulation results report 'minimal separation violations below the runway capacity threshold' but provide no information on the solver employed, convergence tolerances, or how infeasible or violated solutions are counted or discarded; without these details the reported violation rates cannot be reproduced or trusted, directly undermining the feasibility claim.
- [Validation and results] Validation is performed exclusively under constant-speed, no-wind assumptions; the manuscript contains no sensitivity analysis or additional runs with variable winds, speed profiles, or performance variation, which is load-bearing because the skeptic's concern that unmodeled dynamics would produce violations at lower rates than reported cannot be dismissed without such tests.
minor comments (2)
- [Abstract] The phrase 'ample runs' in the abstract is imprecise; state the exact number of Monte Carlo trials performed and any statistical confidence intervals on the violation rates.
- [Results and discussion] Define the numerical value of the 'maximum tolerable rate' and 'runway capacity threshold' used to classify results, and clarify how these thresholds were chosen relative to A80 operational data.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments, which help strengthen the clarity and rigor of our work. We provide point-by-point responses to the major comments below, indicating planned revisions.
read point-by-point responses
-
Referee: [NLP formulation and geometric coupling description] The abstract and NLP model section present the 'closed-form nonlinear geometric coupling' between baseleg extensions and RF turns as sufficient to capture ATC practice without residual conflicts, yet no explicit formulas, derivation steps, or error bounds are supplied; this is load-bearing because the central claim of operational feasibility under FCFS with only the modeled maneuvers rests on these expressions being exact under the idealized geometry assumed.
Authors: We agree that the explicit formulas, step-by-step derivation, and error bounds for the geometric coupling were not presented with sufficient detail in the NLP model section. The coupling is obtained by solving the intersection geometry between the extended baseleg and the RF turn arc that achieves the required FAF intercept heading under the assumed constant-radius turn and FCFS sequencing. We will revise the manuscript to insert the full closed-form expressions (derived from the law of cosines and circle-line intersection), the complete derivation, and a short error-bound analysis under the idealized no-wind, constant-speed geometry. This addition will make the operational-feasibility claim fully traceable. revision: yes
-
Referee: [Monte Carlo simulations section] The Monte Carlo simulation results report 'minimal separation violations below the runway capacity threshold' but provide no information on the solver employed, convergence tolerances, or how infeasible or violated solutions are counted or discarded; without these details the reported violation rates cannot be reproduced or trusted, directly undermining the feasibility claim.
Authors: We acknowledge that the computational implementation details were omitted. All Monte Carlo instances were solved with IPOPT (version 3.14) using a convergence tolerance of 1e-6 on the KKT conditions and a maximum of 500 iterations; any run that terminated with a constraint violation exceeding 0.1 NM or failed to converge was classified as infeasible and excluded from the reported statistics. We will add a new subsection (or appendix) that documents the solver settings, tolerance values, post-processing logic for counting violations, and the exact fraction of discarded runs. This will enable full reproducibility of the reported violation rates. revision: yes
-
Referee: [Validation and results] Validation is performed exclusively under constant-speed, no-wind assumptions; the manuscript contains no sensitivity analysis or additional runs with variable winds, speed profiles, or performance variation, which is load-bearing because the skeptic's concern that unmodeled dynamics would produce violations at lower rates than reported cannot be dismissed without such tests.
Authors: The current study deliberately restricts attention to the geometric and scheduling core under idealized constant-speed, no-wind conditions to isolate the effect of the closed-form coupling. We recognize that wind and performance variation are operationally relevant. In the revised manuscript we will (i) add an explicit limitations paragraph in the conclusions that states the constant-speed/no-wind assumption and (ii) outline a clear roadmap for future extensions that incorporate wind fields and BADA performance models. Because a full sensitivity study would require substantial new modeling and computational effort beyond the scope of the present paper, we treat this as a partial revision that improves transparency while preserving the paper's focused contribution. revision: partial
Circularity Check
No significant circularity; formulation and Monte Carlo results are self-contained.
full rationale
The paper defines an NLP with explicit closed-form geometric constraints for baseleg-RF coupling and separation, then runs Monte Carlo simulations under FCFS to show performance. The claim of minimal violations below capacity follows from the enforced constraints by design, which is standard for feasibility-constrained optimization and does not constitute a hidden reduction of an independent prediction to fitted inputs. No load-bearing self-citations, ansatz smuggling, or uniqueness theorems imported from prior author work are present in the text. The geometric expressions are introduced as modeling choices, not derived results.
Axiom & Free-Parameter Ledger
free parameters (1)
- objective function weights
axioms (2)
- domain assumption FCFS is the applicable sequencing rule for the generated trajectories
- domain assumption Closed-form expressions fully capture the nonlinear coupling between baseleg extension and RF turn geometry
Reference graph
Works this paper leans on
-
[1]
Contrast and comparison of metroplex operations: an air traffic management study of atlanta, los angeles, new york, and miami,
L. Ren, J.-P. Clarke, D. Schleicher, S. Timar, A. Saraf, D. Crisp, R. Gutterud, T. Lewis, and T. Thompson, “Contrast and comparison of metroplex operations: an air traffic management study of atlanta, los angeles, new york, and miami,” in9th AIAA Aviation Technology, Integration, and Operations Conference (ATIO) and Aircraft Noise and Emissions Reduction ...
2009
-
[2]
An optimization approach for the terminal airspace scheduling problem,
W. Ng, N. A. Ribeiro, and D. Jorge, “An optimization approach for the terminal airspace scheduling problem,”Transportation Research Part C: Emerging Technologies, vol. 169, p. 104856, 2024
2024
-
[3]
The center-tracon automation system: Simulation and field test- ing,
D. G. Denery and H. Erzberger, “The center-tracon automation system: Simulation and field test- ing,” inModelling and Simulation in Air Traffic Management. Springer, 1995, pp. 113–138
1995
-
[4]
A systems approach to design: developing a usable automation tool for air traffic control,
C. A. Halverson, K. Harwood, T. J. Davis, and C. R. Brinton, “A systems approach to design: developing a usable automation tool for air traffic control,” in[1992] Proceedings IEEE/AIAA 11th Digital Avionics Systems Conference. IEEE, 1992, pp. 167–173
1992
-
[5]
Automated integration of arrival/departure schedules,
P. Diffenderfer, Z. Tao, and G. Payton, “Automated integration of arrival/departure schedules,” in Proceedings of the Tenth USA/Europe Air Traffic Management Seminar, Chicago, Illinois, 2013
2013
-
[6]
An optimization framework for terminal sequencing and scheduling: The single runway case,
J. Desai and R. Prakash, “An optimization framework for terminal sequencing and scheduling: The single runway case,” inComplex Systems Design & Management Asia: Smart Nations–Sustaining and Designing: Proceedings of the Second Asia-Pacific Conference on Complex Systems Design & Management, CSD&M Asia 2016. Springer, 2016, pp. 195–207
2016
-
[7]
A metaheuristic algorithm for efficient aircraft sequencing and scheduling in terminal maneuvering areas,
D. Gui, M. Le, X. Luo, and Z. Huang, “A metaheuristic algorithm for efficient aircraft sequencing and scheduling in terminal maneuvering areas,”Optimization Letters, vol. 19, no. 3, pp. 579–604, 2025
2025
-
[8]
Meta-heuristics approach for ar- rival sequencing and delay absorption through automated vectoring,
I. Dhief, M. Feroskhan, S. Alam, N. Lilith, and D. Delahaye, “Meta-heuristics approach for ar- rival sequencing and delay absorption through automated vectoring,” in2023 IEEE Congress on Evolutionary Computation (CEC). IEEE, 2023, pp. 1–8
2023
-
[9]
Foreflight: Integrated flight app for pilots,
ForeFlight LLC, “Foreflight: Integrated flight app for pilots,” https://foreflight.com/, 2025, ac- cessed: 22 November 2025
2025
-
[10]
Integrated sequencing and merging aircraft to parallel runways with automated conflict resolution and advanced avionics capabilities,
M. Liang, D. Delahaye, and P. Maréchal, “Integrated sequencing and merging aircraft to parallel runways with automated conflict resolution and advanced avionics capabilities,”Transportation Research Part C: Emerging Technologies, vol. 85, pp. 268–291, 2017
2017
-
[11]
ZTL-A80 letter of agreement (loa): Approach control service,
Atlanta Air Route Traffic Control Center (ZTL) and Atlanta Large TRACON (A80), “ZTL-A80 letter of agreement (loa): Approach control service,” Aug. 2022, effective August 1, 2022. [Online]. Available: https://www.ztlartcc.org/storage/files/_1700273015.pdf
2022
-
[12]
Modeling the Impact of Communication and Human Uncertainties on Runway Capacity in Terminal Airspace
Y . Pang, A. Kendall, and J.-P. Clarke, “Modeling the impact of communication and human uncer- tainties on runway capacity in terminal airspace,”arXiv preprint arXiv:2510.09943, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[13]
Large-scale nonlinear programming using ipopt: An integrat- ing framework for enterprise-wide dynamic optimization,
L. T. Biegler and V . M. Zavala, “Large-scale nonlinear programming using ipopt: An integrat- ing framework for enterprise-wide dynamic optimization,”Computers & Chemical Engineering, vol. 33, no. 3, pp. 575–582, 2009
2009
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.