Pulsar Selection Criteria and Performance Evaluation of Autonomous X-ray Pulsar Navigation Systems
Pith reviewed 2026-05-10 03:19 UTC · model grok-4.3
The pith
The Crab pulsar delivers highest accuracy in X-ray navigation but causes filter divergence after 20 days without updates.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By folding pulsed flux, visibility, geometric configuration, and long-term timing stability into pulsar selection and using NICER-derived noise statistics inside an onboard extended Kalman filter, the navigation system reaches position errors below 7 km in LEO and 20 km during interplanetary transfer when the Crab pulsar is used with a 200 cm² instrument; however, the Crab’s limited timing stability drives filter divergence after 20 days without model updates, whereas more stable pulsars sustain autonomy over longer durations at the cost of reduced accuracy.
What carries the argument
Extended Kalman filter processing timing residuals from pulsars chosen by the combined criteria of pulsed flux, visibility, geometric configuration, and timing stability.
If this is right
- Including the Crab pulsar keeps position errors below 7 km in LEO and 20 km during Earth-to-Jupiter transfer for a 200 cm² instrument.
- The navigation filter diverges after about 20 days when the Crab pulsar is used without periodic timing-model updates.
- Stable pulsars alone permit extended autonomous operation without updates but at lower accuracy than the Crab-inclusive set.
- The same selection process and filter work for both low-Earth-orbit satellites and interplanetary transfers.
Where Pith is reading between the lines
- A hybrid selection scheme that switches between the Crab and stable pulsars could extend high-accuracy operation past the 20-day limit shown for the Crab alone.
- Real missions will likely need occasional ground-provided timing updates even when stable pulsars are used, to counteract any slow model drift not captured in the simulations.
- The 200 cm² detector size sets a performance floor; larger collecting areas or improved noise filtering would be required to push errors significantly below the reported values.
Load-bearing premise
The noise statistics measured by NICER match the errors that a 200 cm² instrument would produce and the adopted pulsar timing models remain valid without updates for the entire simulated mission length.
What would settle it
A flight or high-fidelity simulation that tracks position error with the Crab pulsar and shows either sustained sub-20 km accuracy beyond 20 days or clear divergence near day 20 when no timing-model updates are supplied.
Figures

























read the original abstract
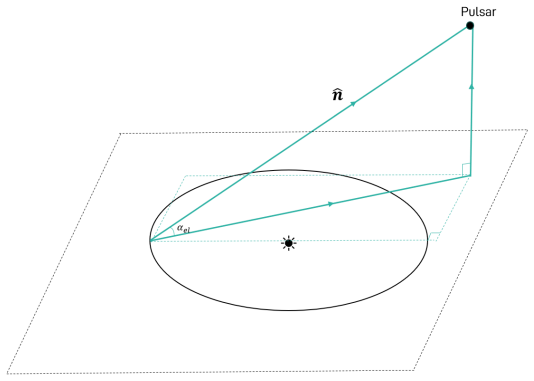
Current space missions primarily depend on Earth-based Guidance, Navigation, and Control (GNC) systems involving human-in-the-loop operations. X-ray pulsar-based navigation offers a promising alternative by using the very precise periodic X-ray emissions from pulsars for fully autonomous state estimation. This study presents a comprehensive analysis of pulsar selection criteria that significantly influence overall navigation performance. Observational data from the NICER mission is used to derive realistic estimates of measurement noise. Key mission-level constraints, including pulsed flux, pulsar visibility, geometric configuration, and long-term timing stability, are integrated into the pulsar selection process, addressing limitations of existing studies. An extended Kalman filter (EKF) is used for onboard spacecraft state estimation. The proposed system is evaluated in two scenarios: a Low Earth Orbit (LEO) satellite at 600 km altitude and an interplanetary transfer from Earth to Jupiter. Simulation results show that including the Crab pulsar yields position errors below 7 km in LEO and 20 km during interplanetary transfer with an instrument effective area of 200~cm$^2$; however, the Crab's limited timing stability leads to filter divergence after 20 days without timing model updates. In contrast, more stable pulsars enable long-term autonomy but with reduced accuracy. These results highlight the trade-offs involved in pulsar selection for autonomous navigation and the need to balance competing objectives. Overall, this study demonstrates the feasibility of X-ray pulsar-based navigation and marks a key step towards fully autonomous spacecraft operations.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper analyzes pulsar selection criteria for autonomous X-ray pulsar navigation, integrating pulsed flux, visibility, geometry, and timing stability constraints. It derives realistic measurement noise from NICER observations, implements an extended Kalman filter (EKF) for onboard state estimation, and evaluates performance via simulations in a 600 km LEO scenario and an Earth-to-Jupiter interplanetary transfer. Results claim that including the Crab pulsar yields position errors below 7 km (LEO) and 20 km (interplanetary) with a 200 cm² effective area, but causes filter divergence after ~20 days without timing updates, while more stable pulsars enable longer autonomy at the cost of accuracy.
Significance. If the simulation framework and noise model hold, the work usefully quantifies trade-offs between short-term accuracy and long-term stability in pulsar selection for XNAV, extending prior studies by combining multiple mission constraints with NICER-based noise estimates. The dual-scenario evaluation and emphasis on timing model updates provide practical guidance for autonomous deep-space GNC, though the lack of real-flight validation limits immediate applicability.
major comments (3)
- [§4 and §5] §4 (Measurement Model) and §5 (Simulation Results): The TOA noise covariance is taken directly from NICER observations (~2000 cm², LEO with albedo/atmospheric background) and applied without explicit scaling derivation or photon-rate propagation to the simulated 200 cm² instrument operating in both LEO and deep-space (cosmic-only background) environments; this directly underpins the quoted <7 km / <20 km position errors and must be shown to preserve the reported magnitudes.
- [§5] §5 (Simulation Results): The effective area (200 cm²) and pulsar timing-stability thresholds are presented as fixed inputs that produce the headline error figures and the 20-day divergence point; no sensitivity analysis or Monte Carlo error bars on these outputs is provided, making the central performance claims dependent on post-hoc parameter choices rather than robust predictions.
- [§5] §5 (Simulation Results): The EKF divergence after 20 days for the Crab and long-term stability for other pulsars are stated without details on filter tuning, process-noise covariance, or sensitivity to unmodeled effects (glitches, DM variations, proper motion) over the simulated durations; this weakens the claim that stable pulsars enable autonomous operation.
minor comments (2)
- [Abstract] Notation for effective area in the abstract uses '200~cm$^2$'; ensure consistent LaTeX formatting and units throughout the text and figures.
- [Abstract and §2] The abstract and results sections would benefit from explicit citation of prior XNAV pulsar-selection studies to better contextualize the integrated constraints.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments, which help improve the clarity and robustness of our analysis. We address each major comment below and will revise the manuscript to incorporate the suggested enhancements.
read point-by-point responses
-
Referee: [§4 and §5] §4 (Measurement Model) and §5 (Simulation Results): The TOA noise covariance is taken directly from NICER observations (~2000 cm², LEO with albedo/atmospheric background) and applied without explicit scaling derivation or photon-rate propagation to the simulated 200 cm² instrument operating in both LEO and deep-space (cosmic-only background) environments; this directly underpins the quoted <7 km / <20 km position errors and must be shown to preserve the reported magnitudes.
Authors: We agree that an explicit scaling derivation is required. The TOA uncertainty scales with the inverse square root of the collected photons, which is proportional to effective area, with background rates adjusted for environment. In the revised §4 we will add the full photon-rate propagation for the 200 cm² case in both LEO (albedo/atmospheric) and interplanetary (cosmic-only) backgrounds, confirming that the reported position errors remain consistent with the scaled covariance. revision: yes
-
Referee: [§5] §5 (Simulation Results): The effective area (200 cm²) and pulsar timing-stability thresholds are presented as fixed inputs that produce the headline error figures and the 20-day divergence point; no sensitivity analysis or Monte Carlo error bars on these outputs is provided, making the central performance claims dependent on post-hoc parameter choices rather than robust predictions.
Authors: The 200 cm² value was selected as representative of a compact flight instrument. We will add a sensitivity analysis in the revised §5 that varies effective area around this value and the stability thresholds, together with Monte Carlo ensembles that report error bars on the position-error statistics. This will demonstrate that the headline results and the 20-day divergence point are not artifacts of single-point parameter choices. revision: yes
-
Referee: [§5] §5 (Simulation Results): The EKF divergence after 20 days for the Crab and long-term stability for other pulsars are stated without details on filter tuning, process-noise covariance, or sensitivity to unmodeled effects (glitches, DM variations, proper motion) over the simulated durations; this weakens the claim that stable pulsars enable autonomous operation.
Authors: We will expand §5 to document the EKF tuning parameters and the process-noise covariance matrix used. The Crab divergence is driven by its documented timing noise; for the stable pulsars we assume periodic timing-model updates as stated in the paper. A brief discussion of glitch rates, DM variations, and proper motion will be added, showing their cumulative effect remains negligible over the simulated intervals. Full Monte-Carlo sensitivity to every unmodeled term would require additional modeling beyond the present scope, so we provide a qualitative assessment supported by published pulsar timing data. revision: partial
Circularity Check
No circularity: performance metrics are forward simulation outputs under external noise parameters
full rationale
The paper derives measurement noise from NICER observations, selects pulsars by flux/visibility/stability criteria, and runs an EKF to produce position-error statistics for a 200 cm² instrument in LEO and interplanetary scenarios. These outputs are numerical results of the simulation under stated assumptions rather than quantities that reduce by the paper's own equations to the inputs by construction. No self-definitional steps, fitted-input predictions, or load-bearing self-citations appear in the abstract or described chain. The evaluation is self-contained as a simulation study.
Axiom & Free-Parameter Ledger
free parameters (2)
- instrument effective area =
200 cm²
- pulsar timing stability thresholds
axioms (2)
- standard math Extended Kalman filter yields near-optimal state estimates when measurement noise is Gaussian and the dynamics model is accurate.
- domain assumption NICER observational data supplies realistic measurement noise statistics for a future 200 cm² X-ray instrument.
Reference graph
Works this paper leans on
-
[1]
G.Downs, Interplanetarynavigationusingpulsatingradiosources, Tech. rep. (1974)
1974
-
[2]
S. I. Sheikh, D. J. Pines, P. S. Ray, K. S. Wood, M. N. Lovellette, M. T. Wolff, Spacecraft navigation using x-ray pulsars, Journal of Guidance, Control, and Dynamics 29 (1) (2006) 49–63
2006
-
[3]
Huang, P
L. Huang, P. Shuai, X. Zhang, S. Chen, Pulsar-based navigation re- sults: data processing of the x-ray pulsar navigation-i telescope, Jour- nal of Astronomical Telescopes, Instruments, and Systems 5 (1) (2019) 018003–018003
2019
-
[4]
J. W. Mitchell, L. M. Winternitz, M. A. Hassouneh, S. R. Price, S. R. Semper, W. H. Yu, P. S. Ray, M. T. Wolff, M. Kerr, K. S. Wood, P. De- morest, Sextant x-ray pulsar navigation demonstration: Initial on-orbit results, in: Annual American Astronautical Society (AAS) Guidance and Control Conference 2018, no. GSFC-E-DAA-TN51842, 2018
2018
-
[5]
L. B. Winternitz, M. A. Hassouneh, J. W. Mitchell, S. R. Price, W. H. Yu, S. R. Semper, P. S. Ray, K. S. Wood, Z. Arzoumanian, K. C. Gen- dreau, Sextant x-ray pulsar navigation demonstration: Additional on- orbit results, in: 2018 SpaceOps conference, 2018, p. 2538. 61
2018
-
[6]
J. Liu, J. Ma, J. Tian, Z. Kang, P. White, Pulsar navigation for in- terplanetary missions using cv model and asukf, Aerospace Science and Technology 22 (1) (2012) 19–23
2012
-
[7]
Zhang, R
H. Zhang, R. Jiao, L. Xu, Orbit determination using pulsar timing data and orientation vector, The Journal of Navigation 72 (1) (2019) 155–175
2019
-
[8]
M. Xue, D. Peng, H. Sun, H. Shentu, Y. Guo, J. Luo, C. Zhikun, X-ray pulsar navigation based on two-stage estimation of doppler frequency and phase delay, Aerospace Science and Technology 110 (2021) 106470
2021
-
[9]
P.-T. Chen, B. Zhou, J. L. Speyer, D. S. Bayard, W. A. Majid, L. J. Wood, Aspects of pulsar navigation for deep space mission applications, The Journal of the Astronautical Sciences 67 (2020) 704–739
2020
-
[10]
P.-T. Chen, J. L. Speyer, D. S. Bayard, W. A. Majid, Autonomous nav- igation using x-ray pulsars and multirate processing, Journal of Guid- ance, Control, and Dynamics 40 (9) (2017) 2237–2249
2017
-
[11]
Cacciatore, V
F. Cacciatore, V. G. Ruiz, G. Taubmann, J. Muñoz, P. Hermosín, M. Sciarra, M. Saco, N. Rea, M. Hernanz, E. Parent, J. Vandersteen, Podium: A pulsar navigation unit for science missions, in: 73rd Inter- national Astronautical Congress 2022, no. B6, IPB, 4, x70308, 2022
2022
-
[12]
Zoccarato, S
P. Zoccarato, S. Larese, G. Naletto, L. Zampieri, F. Brotto, Deep space navigation by optical pulsars, Journal of Guidance, Control, and Dy- namics 46 (8) (2023) 1501–1512
2023
-
[13]
X. Ning, M. Gui, J. Fang, G. Liu, Differential x-ray pulsar aided celestial 62 navigation for mars exploration, Aerospace Science and Technology 62 (2017) 36–45
2017
-
[14]
J. Rong, X. Luping, H. Zhang, L. Cong, Augmentation method of xpnav in mars orbit based on phobos and deimos observations, Advances in Space Research 58 (9) (2016) 1864–1878
2016
-
[15]
X. Kai, W. Chunling, L. Liangdong, Performance enhancement of x-ray pulsar navigation using autonomous optical sensor, Acta Astronautica 128 (2016) 473–484
2016
-
[16]
L. Gu, X. Jiang, S. Li, W. Li, Optical/radio/pulsars integrated naviga- tion for mars orbiter, Advances in Space Research 63 (1) (2019) 512–525
2019
-
[17]
Zhang, H
L. Zhang, H. Fang, W. Bao, H. Sun, L. Shen, J. Su, L. Zhao, Enhanced x-ray pulsar navigation based on ranging information of a satellite, Air- craft Engineering and Aerospace Technology 94 (10) (2022) 1872–1882
2022
-
[18]
S. Chen, F. Topputo, Autonomous navigation using integrated x-ray pulsar and optical measurements, in: 29th International Symposium on Space Flight Dynamics (ISSFD), 2024, pp. 1–7
2024
-
[19]
Parthasarathy, R
A. Parthasarathy, R. Shannon, S. Johnston, L. Lentati, M. Bailes, S. Dai, M. Kerr, R. Manchester, S. Osłowski, C. Sobey, W. van Straten, P. Weltevrede, Timing of young radio pulsars–i. timing noise, periodic modulation, and proper motion, Monthly Notices of the Royal Astro- nomical Society 489 (3) (2019) 3810–3826
2019
- [20]
-
[21]
1979, ApJ, 234, 1100, doi: 10.1086/157593
S. Detweiler, Pulsar timing measurements and the search for grav- itational waves, The Astrophysical Journal 234 (1979) 1100–1104. doi:10.1086/157593
-
[22]
R. W. Hellings, G. S. Downs, Upper limits on the isotropic gravitational radiation background from pulsar timing analysis, The Astrophysical Journal 265 (1983) L39–L42. doi:10.1086/183954
-
[23]
R. S. Foster, D. C. Backer, Constructing a pulsar timing array, The Astrophysical Journal 361 (1990) 300–308. doi:10.1086/169195
-
[24]
2010, Classical and Quantum Gravity, 27, 084013, doi: 10.1088/0264-9381/27/8/084013
G. Hobbs, A. Archibald, Z. Arzoumanian, D. Backer, M. Bailes, N. D. R. Bhat, M.Burgay, S.Burke-Spolaor, D.Champion, I.Cognard, W.Coles, J. M. Cordes, P. Demorest, G. Desvignes, R. D. Ferdman, L. S. Finn, P. C. C. Freire, M. E. Gonzalez, J. W. T. Hessels, ..., X. P. You, The in- ternational pulsar timing array project: using pulsars as a gravitational wave...
-
[25]
A. Lyne, C. Jordan, F. Graham-Smith, C. Espinoza, B. Stappers, P. Weltevrede, 45 years of rotation of the crab pulsar, Monthly Notices of the Royal Astronomical Society 446 (1) (2015) 857–864
2015
-
[26]
Verbiest, J
J. Verbiest, J. Weisberg, A. Chael, K. Lee, D. Lorimer, On pulsar dis- tance measurements and their uncertainties, The Astrophysical Journal 755 (1) (2012) 39
2012
-
[27]
Shamohammadi, N
D.Reardon, R.Shannon, A.Cameron, B.Goncharov, G.Hobbs, H.Mid- dleton, M. Shamohammadi, N. Thyagarajan, M. Bailes, N. Bhat, ..., 64 X. J. Zhu, The parkes pulsar timing array second data release: timing analysis, Monthly Notices of the Royal Astronomical Society 507 (2) (2021) 2137–2153
2021
-
[28]
Baumgardt, E
H. Baumgardt, E. Vasiliev, Accurate distances to galactic globular clusters through a combination of gaia edr3, hst, and literature data, Monthly Notices of the Royal Astronomical Society 505 (4) (2021) 5957– 5977
2021
-
[29]
M. F. Alam, Z. Arzoumanian, P. T. Baker, H. Blumer, K. E. Bohler, A. Brazier, P. R. Brook, S. Burke-Spolaor, K. Caballero, R. S. Camuc- cio, ..., W. Zhu, The nanograv 12.5 yr data set: wideband timing of 47 millisecond pulsars, The Astrophysical Journal Supplement Series 252 (1) (2020) 5
2020
-
[30]
Y.Du, J.Yang, R.M.Campbell, G.Janssen, B.Stappers, D.Chen, Very long baseline interferometry measured proper motion and parallax of the γ-ray millisecond pulsar psr j0218+ 4232, The Astrophysical Journal Letters 782 (2) (2014) L38
2014
-
[31]
Verbiest, D
J. Verbiest, D. Lorimer, Why the distance of psr j0218+ 4232 does not challenge pulsar emission theories, Monthly Notices of the Royal Astronomical Society 444 (2) (2014) 1859–1861
2014
-
[32]
Reardon, G
D. Reardon, G. Hobbs, W. Coles, Y. Levin, M. Keith, M. Bailes, N. Bhat, S. Burke-Spolaor, S. Dai, M. Kerr, Timing analysis for 20 millisecond pulsars in the parkes pulsar timing array, Monthly Notices of the Royal Astronomical Society 455 (2) (2016) 1751–1769. 65
2016
-
[33]
Deller, J
A. Deller, J. Verbiest, S. Tingay, M. Bailes, Extremely high precision vlbiastrometryofpsrj0437–4715andimplicationsfortheoriesofgravity, The Astrophysical Journal 685 (1) (2008) L67
2008
-
[34]
Fonseca, H
E. Fonseca, H. T. Cromartie, T. T. Pennucci, P. S. Ray, A. Y. Kirichenko, S. M. Ransom, P. B. Demorest, I. H. Stairs, Z. Arzouma- nian, L. Guillemot, Refined mass and geometric measurements of the high-mass psr j0740+ 6620, The Astrophysical Journal Letters 915 (1) (2021) L12
2021
-
[35]
Desvignes, R
G. Desvignes, R. Caballero, L. Lentati, J. Verbiest, D. Champion, B. Stappers, G. Janssen, P. Lazarus, S. Osłowski, S. Babak, High- precision timing of 42 millisecond pulsars with the european pulsar tim- ing array, Monthly Notices of the Royal Astronomical Society 458 (3) (2016) 3341–3380
2016
-
[36]
H. Ding, A. T. Deller, P. Freire, D. L. Kaplan, T. J. W. Lazio, R. Shan- non, B. Stappers, Very long baseline astrometry of psr j1012+ 5307 and its implications on alternative theories of gravity, The Astrophysical Journal 896 (1) (2020) 85
2020
-
[37]
D. L. Kaplan, T. Kupfer, D. J. Nice, A. Irrgang, U. Heber, Z. Arzouma- nian, E. Beklen, K. Crowter, M. E. DeCesar, P. B. Demorest, et al., Psr j1024–0719: a millisecond pulsar in an unusual long-period orbit, The Astrophysical Journal 826 (1) (2016) 86
2016
-
[38]
P. S. Ray, S. Guillot, S. M. Ransom, M. Kerr, S. Bogdanov, A. K. Harding, M. T. Wolff, C. Malacaria, K. C. Gendreau, Z. Arzoumanian, 66 C. Markwardt, Y. Soong, J. P. Doty, Discovery of soft x-ray pulsa- tions from psr j1231–1411 using nicer, The Astrophysical Journal Letters 878 (1) (2019) L22
2019
-
[39]
Guillemot, D
L. Guillemot, D. Smith, H. Laffon, G. Janssen, I. Cognard, G. Theureau, G. Desvignes, E. Ferrara, P. Ray, The gamma-ray millisecond pulsar deathline, revisited-new velocity and distance measurements, Astron- omy & Astrophysics 587 (2016) A109
2016
-
[40]
Bassa, J
C. Bassa, J. Antoniadis, F. Camilo, I. Cognard, D. Koester, M. Kramer, S. Ransom, B. Stappers, Cool white dwarf companions to four millisec- ond pulsars, Monthly Notices of the Royal Astronomical Society 455 (4) (2016) 3806–3813
2016
-
[42]
R. T. Edwards, G. B. Hobbs, R. N. Manchester, TEMPO2, a new pulsar timing package - II. The timing model and precision estimates, MNRAS 372 (4) (2006) 1549–1574. arXiv:astro-ph/0607664, doi:10.1111/j.1365- 2966.2006.10870.x
-
[43]
D. Nice, P. Demorest, I. Stairs, R. Manchester, J. Taylor, W. Peters, J. Weisberg, A. Irwin, N. Wex, Y. Huang, Tempo: Pulsar timing data analysis, Astrophysics Source Code Library, record ascl:1509.002 (Sep. 2015). 67
2015
-
[44]
Hobbs, R
G. Hobbs, R. Edwards, Tempo2: Pulsar Timing Package, Astrophysics Source Code Library, record ascl:1210.015 (Oct. 2012)
2012
-
[45]
J. Luo, S. Ransom, P. Demorest, P. S. Ray, A. Archibald, M. Kerr, R. J. Jennings, M. Bachetti, R. van Haasteren, C. A. Champagne, et al., Pint: a modern software package for pulsar timing, The Astrophysical Journal 911 (1) (2021) 45
2021
-
[46]
J. H. Taylor, Pulsar timing and relativistic gravity, Philosophical Trans- actions of the Royal Society of London. Series A: Physical and Engineer- ing Sciences 341 (1660) (1992) 117–134
1992
-
[47]
K. C. Gendreau, Z. Arzoumanian, P. W. Adkins, C. L. Albert, J. F. Anders, A. T. Aylward, C. L. Baker, E. R. Balsamo, W. A. Bamford, S. S. Benegalrao, The neutron star interior composition explorer (nicer): design and development, in: Space telescopes and instrumentation 2016: Ultraviolet to gamma ray, Vol. 9905, SPIE, 2016, pp. 420–435
2016
-
[48]
Nasa High Energy Astrophysics Science Archive Research Center (Heasarc), HEAsoft: Unified Release of FTOOLS and XANADU (Aug. 2014). arXiv:1408.004. 68
2014
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.