A Probabilistic Framework for Improving Dense Object Detection in Underwater Image Data via Annealing-Based Data Augmentation
Pith reviewed 2026-05-09 22:43 UTC · model grok-4.3
The pith
A pseudo-simulated annealing augmentation framework improves YOLOv10 performance on dense underwater fish detection.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
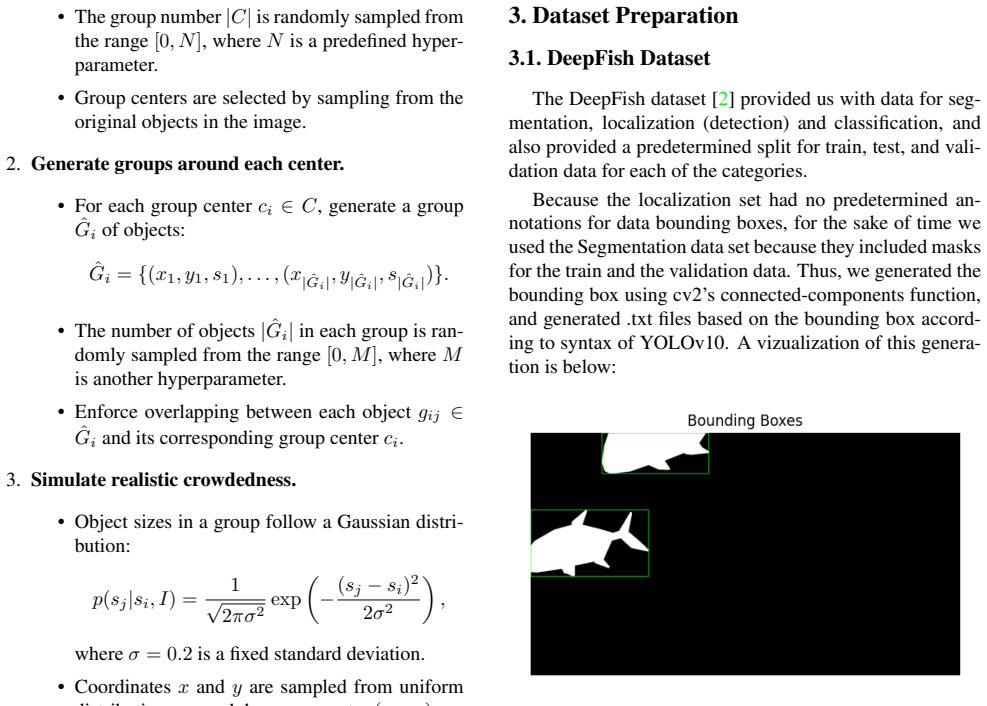
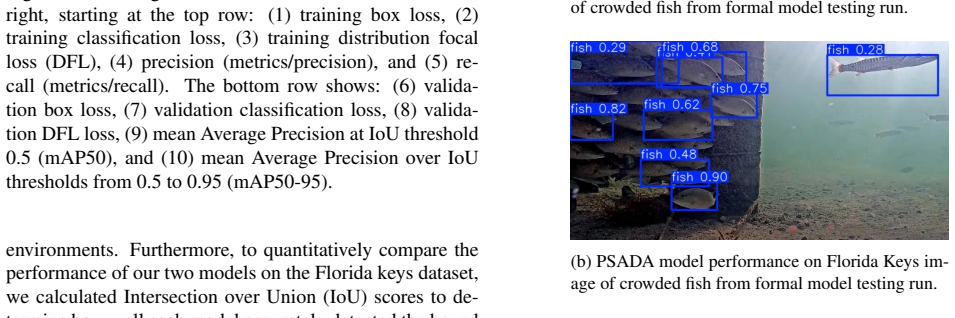
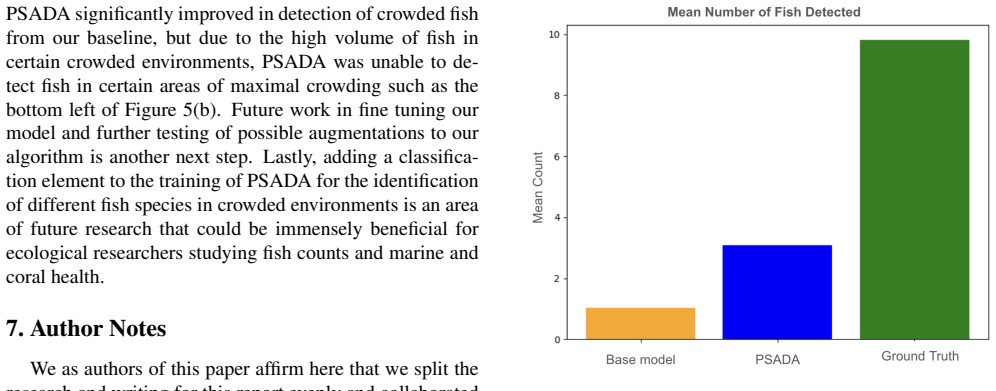
Using the DeepFish dataset, the work converts segmentation masks into bounding box annotations and applies a pseudo-simulated annealing augmentation to create crowded fish scenes. This augmentation, drawing from copy-paste techniques, increases training diversity and density. The resulting models outperform the baseline YOLOv10 especially on challenging real-world underwater images.
What carries the argument
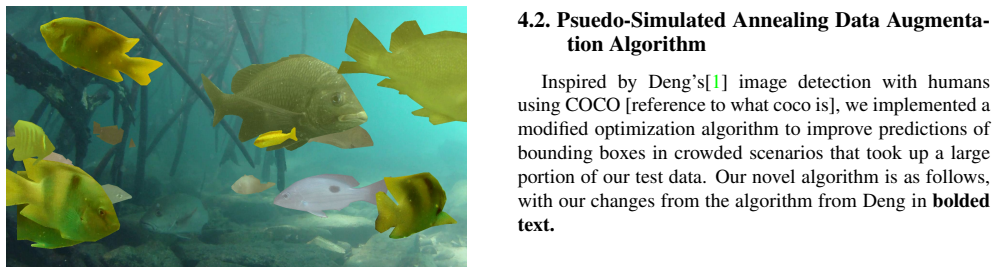
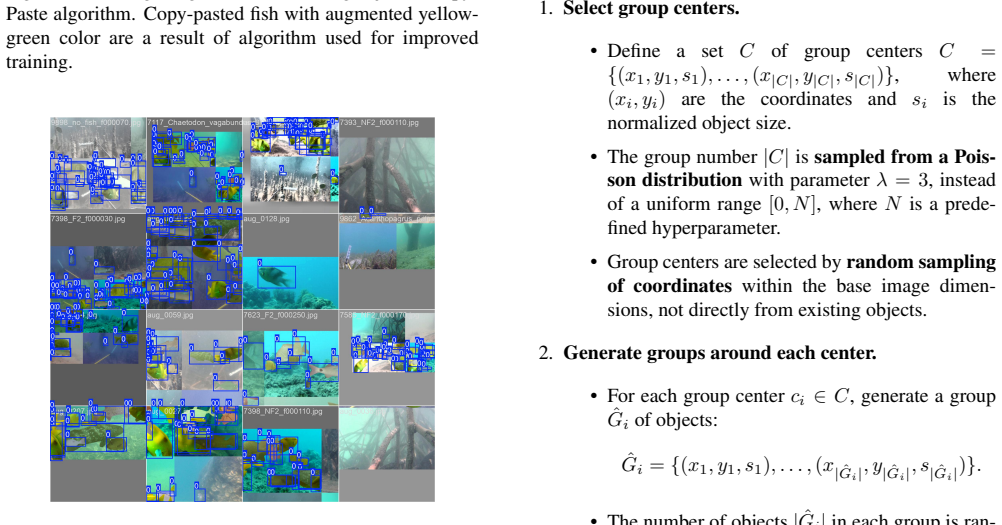
The pseudo-simulated annealing-based augmentation algorithm that synthesizes realistic crowded fish scenarios to increase spatial diversity and object density in training.
If this is right
- Improved handling of occlusions and variability in underwater object detection tasks.
- Better generalization from synthetic crowded scenes to live-stream natural marine footage.
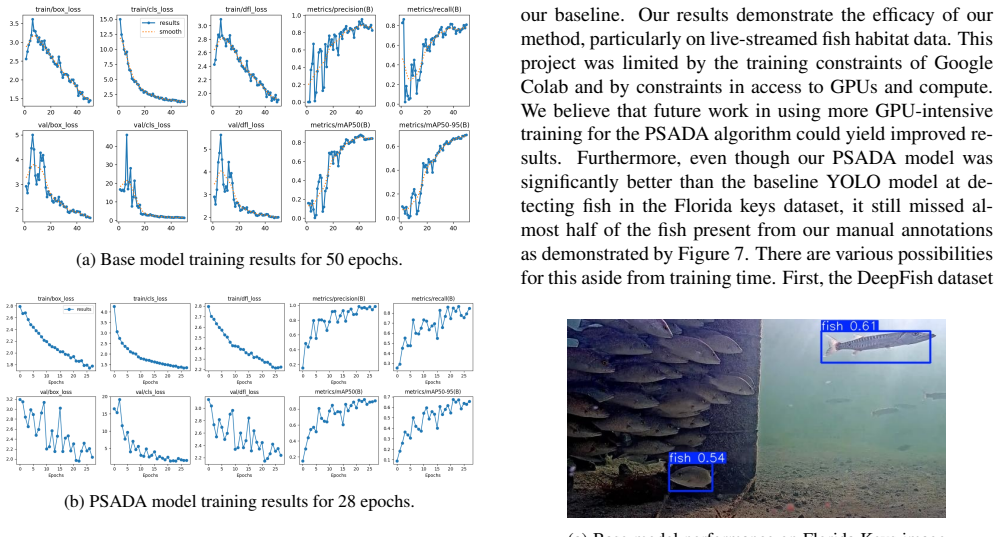
- Higher performance on manually annotated test images collected under real conditions.
- Effective repurposing of existing segmentation datasets for dense detection without new labeling.
Where Pith is reading between the lines
- The same augmentation idea might transfer to other settings with dense, occluded objects such as crowd counting or cell detection in microscopy.
- Leveraging segmentation data this way could reduce the amount of manual bounding-box work needed for new underwater datasets.
- Testing the method on additional marine datasets with different species or water clarity would check whether the gains hold beyond the Florida Keys footage.
Load-bearing premise
The pseudo-simulated annealing process produces augmented images realistic enough to aid generalization to actual underwater conditions rather than adding misleading patterns or biases.
What would settle it
A direct comparison where the augmented training set yields no improvement in detection accuracy on the Florida Keys live-stream test images would disprove the effectiveness of the framework.
Figures
read the original abstract
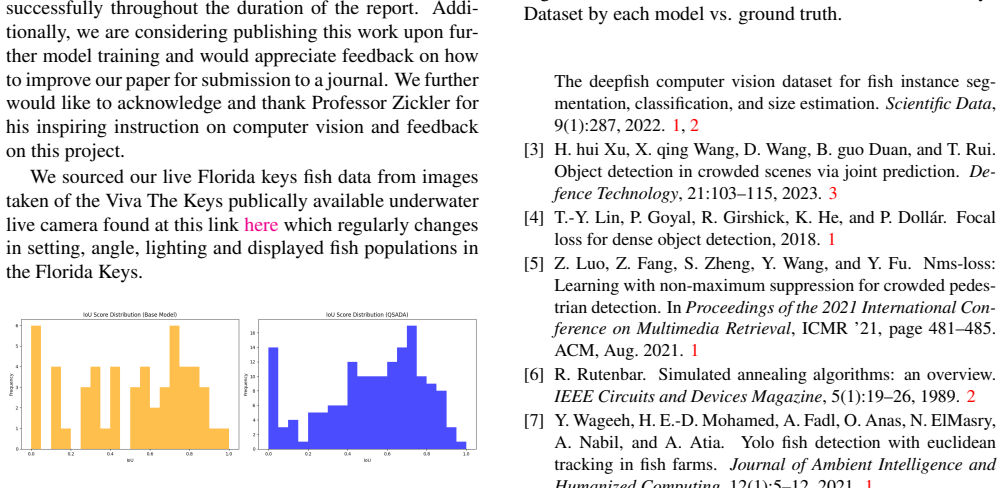
Object detection models typically perform well on images captured in controlled environments with stable lighting, water clarity, and viewpoint, but their performance degrades substantially in real-world underwater settings characterized by high variability and frequent occlusions. In this work, we address these challenges by introducing a novel data augmentation framework designed to improve robustness in dense and unconstrained underwater scenes. Using the DeepFish dataset, which contains images of fish in natural environments, we first generate bounding box annotations from provided segmentation masks to construct a custom detection dataset. We then propose a pseudo-simulated annealing-based augmentation algorithm, inspired by the copy-paste strategy of Deng et al. [1], to synthesize realistic crowded fish scenarios. Our approach improves spatial diversity and object density during training, enabling better generalization to complex scenes. Experimental results show that our method significantly outperforms a baseline YOLOv10 model, particularly on a challenging test set of manually annotated images collected from live-stream footage in the Florida Keys. These results demonstrate the effectiveness of our augmentation strategy for improving detection performance in dense, real-world underwater environments.
Editorial analysis
A structured set of objections, weighed in public.
Circularity Check
No derivation chain present; empirical comparison only
full rationale
The manuscript describes a data-augmentation pipeline (pseudo-simulated annealing copy-paste on DeepFish) and reports mAP gains versus an unaugmented YOLOv10 baseline on a held-out Florida Keys test set. No equations, fitted parameters, uniqueness theorems, or predictive claims appear that could reduce to their own inputs by construction. The sole citation to Deng et al. supplies an external copy-paste precedent and is not invoked to justify any self-referential step. Because the central result is an externally verifiable experimental delta rather than a closed-form derivation, the paper is self-contained against the listed circularity patterns.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Deng, Jiangfan and Fan, Dewen and Qiu, Xiaosong and Zhou, Feng , title =. Proceedings of the Thirty-Seventh AAAI Conference on Artificial Intelligence and Thirty-Fifth Conference on Innovative Applications of Artificial Intelligence and Thirteenth Symposium on Educational Advances in Artificial Intelligence , articleno =. 2023 , isbn =. doi:10.1609/aaai.v...
-
[2]
Object detection in crowded scenes via joint prediction , journal =
Hong-hui Xu and Xin-qing Wang and Dong Wang and Bao-guo Duan and Ting Rui , keywords =. Object detection in crowded scenes via joint prediction , journal =. 2023 , issn =. doi:https://doi.org/10.1016/j.dt.2021.10.007 , url =
-
[3]
Focal Loss for Dense Object Detection , year =
Lin, Tsung-Yi and Goyal, Priya and Girshick, Ross and He, Kaiming and Dollár, Piotr , journal =. Focal Loss for Dense Object Detection , year =
-
[4]
YOLOv10: Real-Time End-to-End Object Detection , author=. 2024 , eprint=
work page 2024
- [5]
-
[6]
NMS-Loss: Learning with Non-Maximum Suppression for Crowded Pedestrian Detection , url=
Luo, Zekun and Fang, Zheng and Zheng, Sixiao and Wang, Yabiao and Fu, Yanwei , year=. NMS-Loss: Learning with Non-Maximum Suppression for Crowded Pedestrian Detection , url=. doi:10.1145/3460426.3463588 , booktitle=
- [7]
-
[8]
Garcia-d'Urso, Nahuel and Galan-Cuenca, Alejandro and P. The DeepFish computer vision dataset for fish instance segmentation, classification, and size estimation , url =. Scientific Data , number =. 2022 , bdsk-url-1 =. doi:10.1038/s41597-022-01416-0 , id =
-
[9]
YOLO fish detection with Euclidean tracking in fish farms , url =
Wageeh, Youssef and Mohamed, Hussam El-Din and Fadl, Ali and Anas, Omar and ElMasry, Noha and Nabil, Ayman and Atia, Ayman , date =. YOLO fish detection with Euclidean tracking in fish farms , url =. Journal of Ambient Intelligence and Humanized Computing , number =. 2021 , bdsk-url-1 =. doi:10.1007/s12652-020-02847-6 , id =
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.