Recognition: unknown
Do MLLMs Understand Pointing? Benchmarking and Enhancing Referential Reasoning in Egocentric Vision
Pith reviewed 2026-05-09 21:51 UTC · model grok-4.3
The pith
Multimodal models misread pointing gestures in first-person views but recover accuracy after training on synthetic examples.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
State-of-the-art multimodal large language models exhibit referential hallucination when processing egocentric pointing gestures, relying on spurious visual proximity or saliency cues rather than gesture semantics; fine-tuning on high-fidelity synthetic pointing data produces significant accuracy gains that generalize from simulation to real-world images.
What carries the argument
EgoPoint-Bench, a question-answering benchmark containing over 11,000 high-fidelity samples across five evaluation dimensions and three referential complexity levels that isolates true spatial grounding of pointing from visual shortcuts.
If this is right
- Models fine-tuned on the synthetic pointing data achieve significant performance gains on the benchmark tasks.
- The accuracy improvements transfer robustly when the same models are tested on real-world egocentric images.
- Spatially aware supervision enables more reliable resolution of referential ambiguity in egocentric AI assistants.
- Current model failures stem from reliance on spurious correlations rather than fundamental incapacity.
Where Pith is reading between the lines
- Targeted synthetic supervision on spatial relations could reduce similar grounding failures in other multimodal tasks such as referring expressions without pointing.
- Extending the benchmark to short video clips would test whether the same fine-tuning improves understanding of dynamic or sequential pointing gestures.
- If the synthetic data method scales, wearable systems could be trained for precise gesture understanding using far less real annotated footage.
Load-bearing premise
That the synthetic pointing examples and the five evaluation dimensions accurately represent the range of real egocentric pointing gestures, so that measured gains reflect improved spatial reasoning rather than benchmark-specific patterns.
What would settle it
Evaluation of the fine-tuned models on an independent collection of real egocentric videos with pointing gestures that differ in camera angle, hand appearance, or scene layout from the benchmark's real subset; absence of improvement would falsify the sim-to-real generalization claim.
Figures











read the original abstract
Egocentric AI agents, such as smart glasses, rely on pointing gestures to resolve referential ambiguities in natural language commands. However, despite advancements in Multimodal Large Language Models (MLLMs), current systems often fail to precisely ground the spatial semantics of pointing. Instead, they rely on spurious correlations with visual proximity or object saliency, a phenomenon we term "Referential Hallucination." To address this gap, we introduce EgoPoint-Bench, a comprehensive question-answering benchmark designed to evaluate and enhance multimodal pointing reasoning in egocentric views. Comprising over 11k high-fidelity simulated and real-world samples, the benchmark spans five evaluation dimensions and three levels of referential complexity. Extensive experiments demonstrate that while state-of-the-art proprietary and open-source models struggle with egocentric pointing, models fine-tuned on our synthetic data achieve significant performance gains and robust sim-to-real generalization. This work highlights the importance of spatially aware supervision and offers a scalable path toward precise egocentric AI assistants. Project page: https://guyyyug.github.io/EgoPoint-Bench/
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
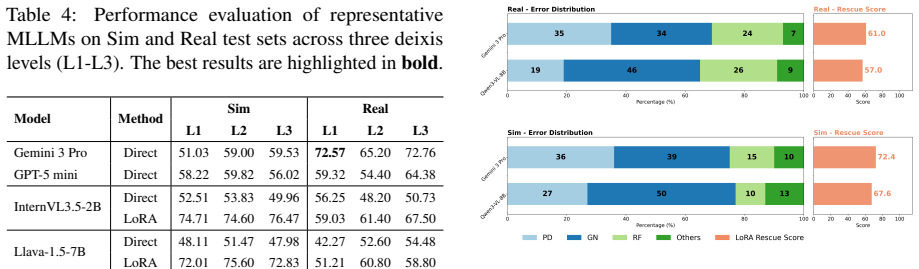
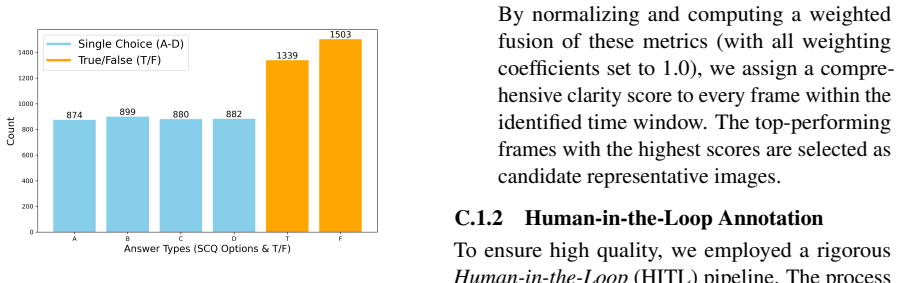
Summary. The paper introduces EgoPoint-Bench, a QA benchmark comprising over 11k high-fidelity simulated and real-world egocentric samples spanning five evaluation dimensions and three levels of referential complexity. It identifies 'Referential Hallucination' in MLLMs (reliance on visual proximity or saliency rather than spatial semantics of pointing), demonstrates that state-of-the-art proprietary and open-source models struggle on the benchmark, and reports that fine-tuning on the authors' synthetic pointing data yields significant performance gains with robust sim-to-real generalization.
Significance. If the sim-to-real transfer claim holds under proper distributional controls, the work offers a scalable synthetic-supervision pathway for improving spatial grounding in egocentric multimodal agents (e.g., smart glasses), addressing a concrete failure mode not captured by existing VQA or referring-expression benchmarks. The multi-dimensional design and explicit separation of simulated versus real splits are strengths that could support reproducible progress in referential reasoning.
major comments (3)
- [§3 and §4.2] §3 (EgoPoint-Bench construction) and §4.2 (sim-to-real experiments): The headline claim of 'robust sim-to-real generalization' after fine-tuning on synthetic data requires evidence that the synthetic pointing distribution (hand pose, ray direction, occlusion statistics, lighting, camera intrinsics) matches the real-world subset of EgoPoint-Bench. No quantitative metrics (Wasserstein distance, KL divergence, or per-dimension histograms) comparing synthetic and real splits are reported, leaving open the possibility that measured gains arise from benchmark-specific pattern matching rather than improved spatial reasoning.
- [§4.1 and §4.3] §4.1 (baseline evaluation) and §4.3 (fine-tuning results): The abstract and results claim 'significant performance gains' yet provide no details on statistical tests (e.g., paired t-tests or bootstrap confidence intervals), effect sizes, or controls for confounding factors such as object saliency and visual proximity. Without these, it is impossible to determine whether the five evaluation dimensions isolate genuine referential reasoning or merely reward models that exploit shared dataset artifacts.
- [§3.2] §3.2 (real-world data collection protocol): The soundness assessment notes the absence of quantitative details on data collection protocols, participant instructions, or inter-annotator agreement for the real-world subset. This is load-bearing because the sim-to-real claim rests on the real split serving as an independent, unbiased test distribution; without protocol transparency, reproducibility and external validity cannot be assessed.
minor comments (2)
- [Figure 3 and Table 2] Figure 3 and Table 2: axis labels and legend entries for the five evaluation dimensions are inconsistently abbreviated between the figure and the main text, making it difficult to map quantitative results back to the claimed dimensions.
- [Related Work] Related Work section: several recent egocentric referring-expression datasets (e.g., Ego4D-Refer, EPIC-KITCHENS-100 referring tasks) are cited only in passing; a brief comparison table would clarify how EgoPoint-Bench differs in its focus on pointing geometry versus language-only referring.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We address each major comment point-by-point below, agreeing where the manuscript can be strengthened through additional analyses and details, and outlining the specific revisions we will make.
read point-by-point responses
-
Referee: [§3 and §4.2] §3 (EgoPoint-Bench construction) and §4.2 (sim-to-real experiments): The headline claim of 'robust sim-to-real generalization' after fine-tuning on synthetic data requires evidence that the synthetic pointing distribution (hand pose, ray direction, occlusion statistics, lighting, camera intrinsics) matches the real-world subset of EgoPoint-Bench. No quantitative metrics (Wasserstein distance, KL divergence, or per-dimension histograms) comparing synthetic and real splits are reported, leaving open the possibility that measured gains arise from benchmark-specific pattern matching rather than improved spatial reasoning.
Authors: We agree that explicit quantitative comparisons between the synthetic and real distributions would provide stronger support for the sim-to-real generalization claim and help rule out pattern matching. In the revised manuscript, we will add per-dimension histograms for hand pose, ray direction, occlusion statistics, lighting, and camera intrinsics, along with Wasserstein distances and KL divergences between the synthetic and real splits. These additions will be placed in §3 and §4.2 to directly address this concern. revision: yes
-
Referee: [§4.1 and §4.3] §4.1 (baseline evaluation) and §4.3 (fine-tuning results): The abstract and results claim 'significant performance gains' yet provide no details on statistical tests (e.g., paired t-tests or bootstrap confidence intervals), effect sizes, or controls for confounding factors such as object saliency and visual proximity. Without these, it is impossible to determine whether the five evaluation dimensions isolate genuine referential reasoning or merely reward models that exploit shared dataset artifacts.
Authors: We acknowledge the need for greater statistical rigor and controls. In the revised version, we will report paired t-tests and bootstrap confidence intervals for all performance comparisons in §4.1 and §4.3, along with effect sizes. We will also add controlled analyses that stratify results by levels of object saliency and visual proximity to demonstrate that gains reflect referential reasoning rather than dataset artifacts. revision: yes
-
Referee: [§3.2] §3.2 (real-world data collection protocol): The soundness assessment notes the absence of quantitative details on data collection protocols, participant instructions, or inter-annotator agreement for the real-world subset. This is load-bearing because the sim-to-real claim rests on the real split serving as an independent, unbiased test distribution; without protocol transparency, reproducibility and external validity cannot be assessed.
Authors: We will expand §3.2 with quantitative details on the real-world collection protocol, including participant instructions, camera setup and intrinsics, number of participants and annotators, and inter-annotator agreement metrics such as Cohen's or Fleiss' kappa. These additions will support reproducibility and confirm the real split as an independent test distribution. revision: yes
Circularity Check
No significant circularity: empirical benchmark and fine-tuning results are self-contained
full rationale
The paper introduces EgoPoint-Bench, evaluates existing MLLMs, and reports fine-tuning gains on synthetic data with sim-to-real transfer. No mathematical derivation chain exists; claims rest on experimental measurements rather than predictions that reduce to author-defined parameters or self-citations. The distributional equivalence assumption between synthetic and real splits is an empirical premise (subject to correctness risk) but does not create circularity by construction. No self-definitional, fitted-input-as-prediction, or uniqueness-imported steps are present.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
MME: A Comprehensive Evaluation Benchmark for Multimodal Large Language Models
Yourefit: Embodied reference understanding with language and gesture. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 1385–1395. Dima Damen, Hazel Doughty, Giovanni Maria Farinella, Sanja Fidler, Antonino Furnari, Evangelos Kazakos, Davide Moltisanti, Jonathan Munro, Toby Perrett, Will Price, and 1 others. 2018. Scaling eg...
work page internal anchor Pith review arXiv 2018
-
[2]
Yaowei Zheng, Richong Zhang, Junhao Zhang, Yanhan Ye, Zheyan Luo, Zhangchi Feng, and Yongqiang Ma
Judging llm-as-a-judge with mt-bench and chatbot arena.Advances in neural information pro- cessing systems, 36:46595–46623. Yaowei Zheng, Richong Zhang, Junhao Zhang, Yanhan Ye, Zheyan Luo, Zhangchi Feng, and Yongqiang Ma
-
[3]
score": <integer_0_to_5>,
Llamafactory: Unified efficient fine-tuning of 100+ language models. InProceedings of the 62nd Annual Meeting of the Association for Compu- tational Linguistics (Volume 3: System Demonstra- tions), Bangkok, Thailand. Association for Computa- tional Linguistics. A Experimental Setup A.1 Model Configurations Regarding the configurations of the mainstream ML...
2024
-
[4]
Laplacian Variance:Captures high- frequency components to detect general focus blur
-
[5]
Frequency Domain Analysis:Analyzes the spectral energy distribution to iden- tify motion blur patterns
-
[6]
Edge Density:Evaluates the sharpness of structural edges within the frame. 2https://github.com/modelscope/FunASR By normalizing and computing a weighted fusion of these metrics (with all weighting coefficients set to 1.0), we assign a compre- hensive clarity score to every frame within the identified time window. The top-performing frames with the highest...
-
[7]
Any visible faces in the background are blurred to protect privacy
Frame Selection & Privacy Protection: Manually select the frames that clearly con- tain the hand gesture from the top candi- dates. Any visible faces in the background are blurred to protect privacy
-
[8]
Transcription Verification:Verify the cor- rectness of the object name and description automatically transcribed by the ASR system
-
[9]
Point-Sim
BBox Annotation:Manually draw Bound- ing Boxes (BBox) around the pointed-at ob- ject. This step requires deep cooperation and communication with the original data collec- tors to ensure the annotated object and BBox strictly align with the user’s original pointing intention, especially in cluttered scenes. Each collector and annotator was paid $15 per hou...
-
[10]
TheTarget Objectname (Ground Truth)
-
[11]
TheTarget Objectdescription or question
-
[12]
The specificDimension(e.g., Affordance, Basic Perception)
-
[13]
The specificDeixis Level(how the object is referenced)
-
[14]
Red Box” Rule - The target object is highlighted with a red bounding box in your internal vision. -NEVERmention “red box
The specificQuestion Type(e.g., Multiple Choice). # Critical Constraint: The “Red Box” Rule - The target object is highlighted with a red bounding box in your internal vision. -NEVERmention “red box”, “rectangle”, “highlight”, or “outline” in the text. - Pretend the user is pointing at the object with their finger. # Guidelines for Quality ## 1. Anti-Chea...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.