Fast Neural-Network Approximation of Active Target Search Under Uncertainty
Pith reviewed 2026-05-08 12:15 UTC · model grok-4.3
The pith
A convolutional neural network approximates active search planners to detect unknown targets at comparable rates but with far less computation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
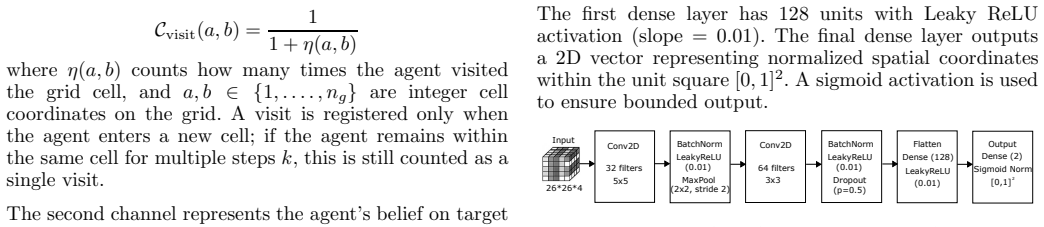
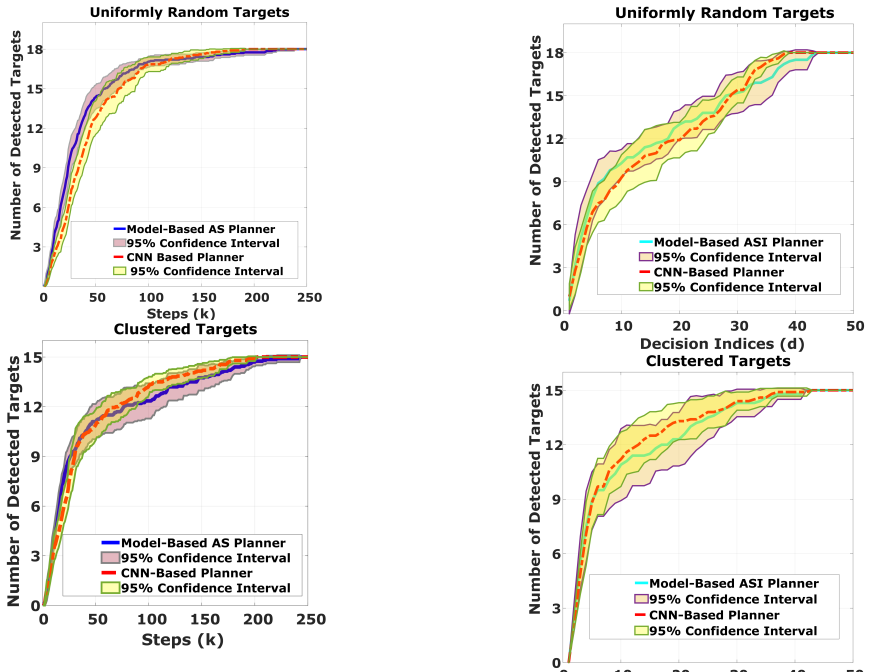
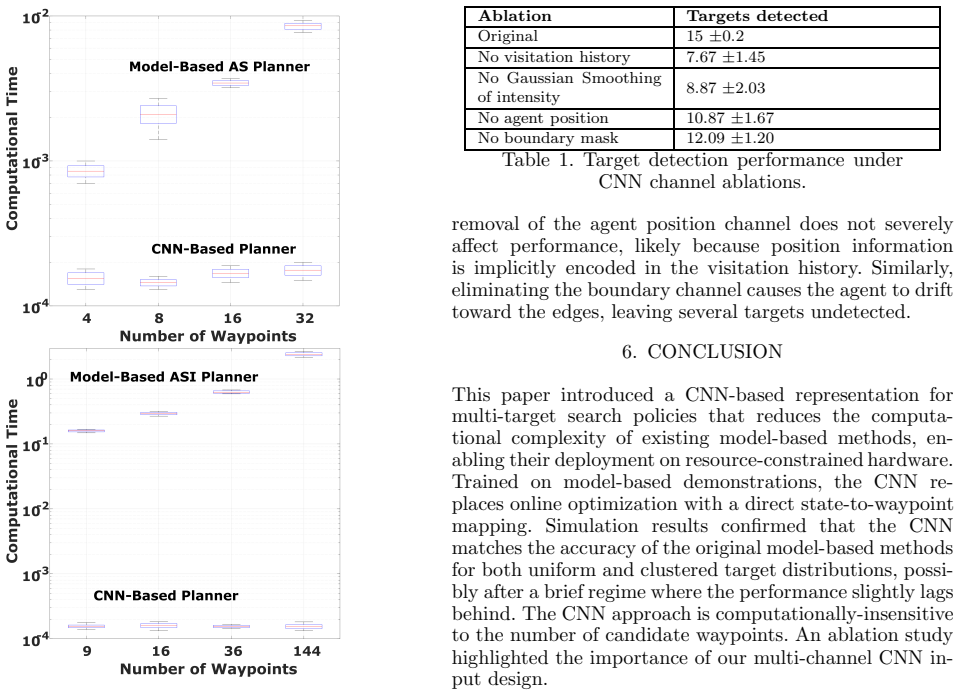
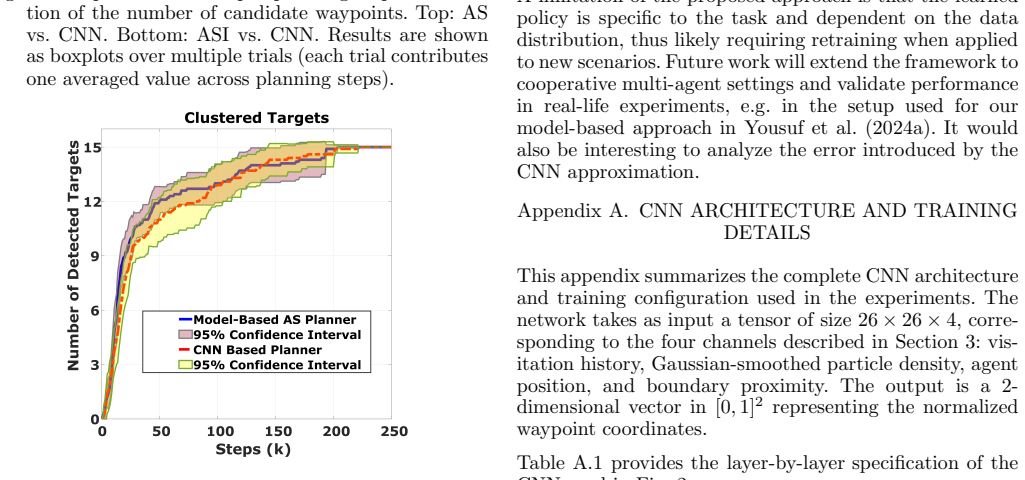
A convolutional neural network trained on data generated by Active Search and Intermittent Active Search planners can directly infer search actions from a multi-channel grid encoding of target beliefs, agent position, visitation history, and boundaries, thereby achieving detection rates comparable to the original planners across uniform and clustered target distributions while reducing online computation by orders of magnitude.
What carries the argument
The convolutional neural network that approximates AS/ASI decisions by mapping a multi-channel grid input (target probability belief, agent state, history, boundaries) to an action output.
If this is right
- Mobile agents can perform target search in real time on limited hardware because each decision becomes a single network forward pass instead of an online optimization.
- The same training approach can be reused for other planners by simply generating new demonstration data from those planners.
- Detection accuracy remains stable for both spread-out and grouped target placements when the network is trained on representative examples of each.
- The grid-based belief encoding allows the method to incorporate any sensor model that produces a probability map over possible target locations.
Where Pith is reading between the lines
- Extending the input channels to include predicted target motion could allow the same architecture to handle slowly moving targets without redesigning the planner.
- Because the network learns from the planner rather than from raw rewards, it inherits any sub-optimality of the teacher; fine-tuning the network with additional reinforcement learning on the true detection objective could close that gap.
- The drastic reduction in per-step cost makes it feasible to run the search on many agents simultaneously or to replan at much higher frequency.
Load-bearing premise
The network trained on data from the original planners and chosen distributions will generalize to new target distributions, environments, and scenarios without substantial loss in detection performance.
What would settle it
Apply the trained network to a new target distribution or environment size not represented in the training data and measure whether its detection rate falls noticeably below that of the original AS or ASI planner.
Figures
read the original abstract
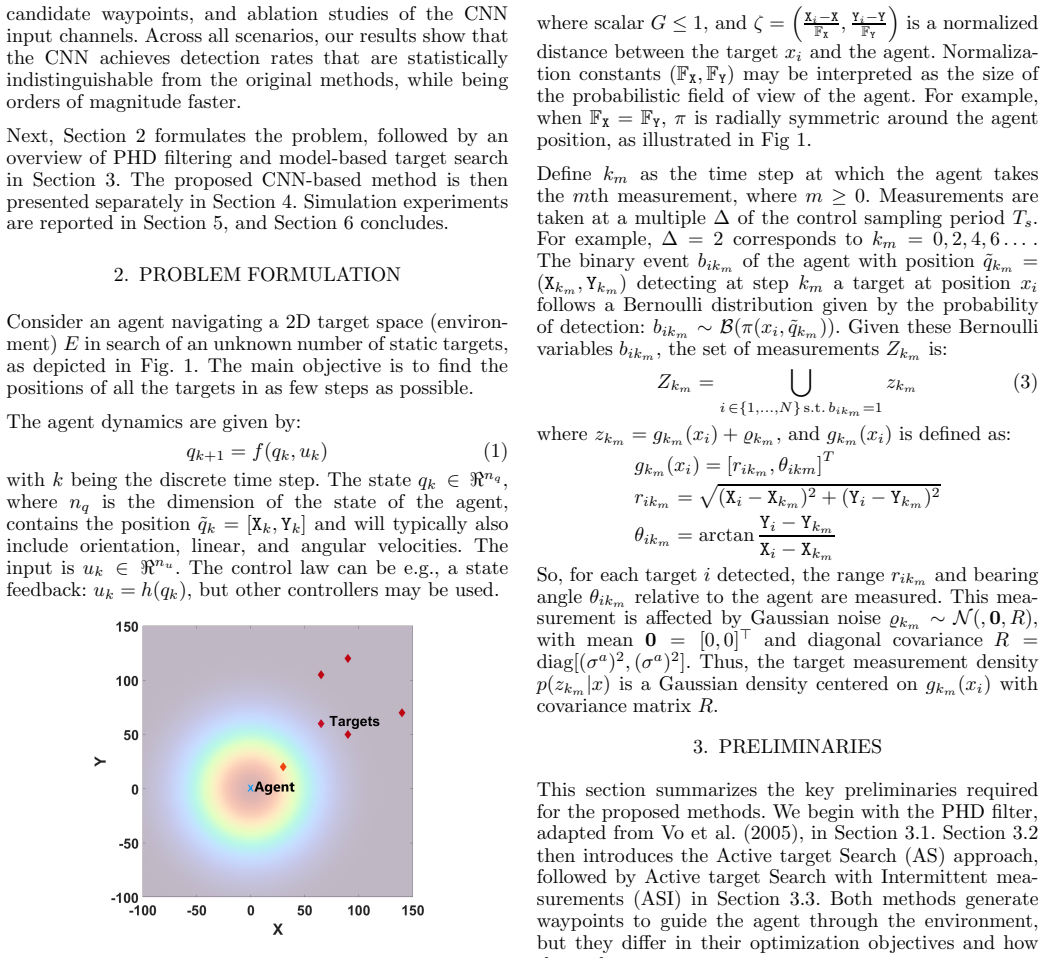
We address the problem of searching for an unknown number of stationary targets at unknown positions with a mobile agent. A probability hypothesis density filter is used to estimate the expected number of targets under measurement uncertainty. Existing planners, such as Active Search (AS) and its Intermittent variant (ASI), achieve accurate detection but require costly online optimization. To reduce online computation, we propose to use a convolutional neural network to approximate AS or ASI decisions through direct inference. The network is trained on AS/ASI data using a multi-channel grid that encodes target beliefs, the agent position, visitation history, and boundary information. Simulations with uniform and clustered target distributions show that the network achieves detection rates comparable to AS or ASI while reducing computation by orders of magnitude.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper addresses the problem of searching for an unknown number of stationary targets at unknown positions with a mobile agent under measurement uncertainty, using a probability hypothesis density (PHD) filter to estimate target cardinality. It proposes training a convolutional neural network (CNN) via supervised imitation learning on rollouts from Active Search (AS) and Active Search Intermittent (ASI) planners. The network takes as input a multi-channel grid encoding PHD beliefs, agent pose, visitation history, and boundaries, and is intended to produce fast decisions that approximate the planners' performance. Simulations on uniform and clustered target distributions are reported to show comparable detection rates with orders-of-magnitude lower online computation.
Significance. If the result holds under broader conditions, the work would offer a practical route to deploying sophisticated uncertainty-aware search strategies in real-time settings by replacing online optimization with fast network inference. The direct imitation of established AS/ASI baselines and the explicit multi-channel grid representation provide a clear, reproducible evaluation framework and a concrete strength. The reported computation reduction is a notable engineering advantage for resource-limited agents, provided the performance equivalence is shown to be robust rather than distribution-specific.
major comments (2)
- [Simulation results] The simulation results (as summarized in the abstract) only cover uniform and clustered target distributions. No ablation studies, hold-out tests, or evaluations on qualitatively different priors (e.g., non-stationary targets, multi-modal distributions with varying cardinality, or non-grid environments) are described. Because the CNN is a direct function approximator rather than an online optimizer, this omission leaves the central generalization claim untested and load-bearing for the assertion of comparable detection rates.
- [Network training and evaluation] The description of CNN training and evaluation provides no information on data splits, validation procedures, statistical tests for performance comparison, hyperparameters, loss function, or safeguards against overfitting. This absence directly weakens the evidential support for the performance claims, as the soundness of the reported detection-rate equivalence cannot be assessed from the given text.
minor comments (1)
- [Abstract] The abstract would benefit from explicitly naming the detection-rate metric and the number of Monte Carlo trials used in the simulations to allow immediate assessment of the strength of the empirical claims.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the scope of our simulations and the transparency of our training procedure. We address each major comment below, indicating revisions where the manuscript will be updated to improve clarity and completeness.
read point-by-point responses
-
Referee: [Simulation results] The simulation results (as summarized in the abstract) only cover uniform and clustered target distributions. No ablation studies, hold-out tests, or evaluations on qualitatively different priors (e.g., non-stationary targets, multi-modal distributions with varying cardinality, or non-grid environments) are described. Because the CNN is a direct function approximator rather than an online optimizer, this omission leaves the central generalization claim untested and load-bearing for the assertion of comparable detection rates.
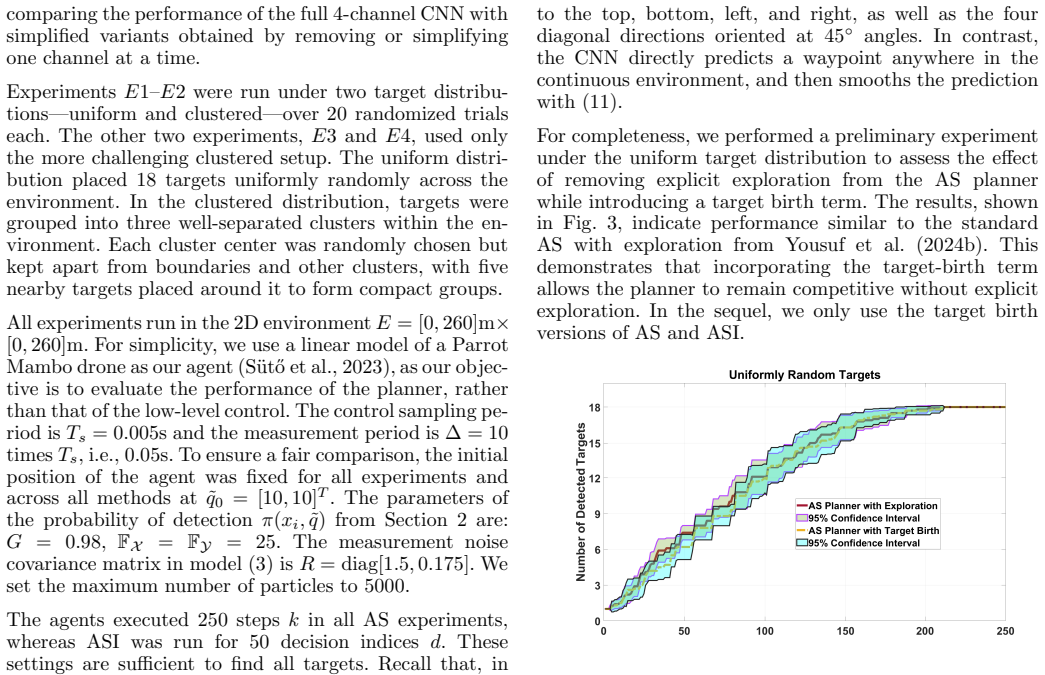
Authors: The claims in the manuscript are explicitly limited to uniform and clustered stationary target distributions on a grid, as stated in the abstract and simulation sections; no broader generalization is asserted. The CNN approximates the decisions of the AS and ASI planners, which are themselves formulated for this stationary-target setting. We will revise the manuscript to add an explicit limitations paragraph that acknowledges the tested scope and outlines directions for future evaluation on other priors, without claiming robustness beyond the reported cases. revision: partial
-
Referee: [Network training and evaluation] The description of CNN training and evaluation provides no information on data splits, validation procedures, statistical tests for performance comparison, hyperparameters, loss function, or safeguards against overfitting. This absence directly weakens the evidential support for the performance claims, as the soundness of the reported detection-rate equivalence cannot be assessed from the given text.
Authors: We agree that these methodological details are necessary for reproducibility and for readers to evaluate the strength of the performance equivalence. The revised manuscript will expand the training and evaluation subsection to specify the data splits (including how rollouts were partitioned), validation approach, loss function for imitation learning, hyperparameter choices, regularization techniques against overfitting, and statistical comparisons (e.g., confidence intervals or tests) between the network and the baseline planners. revision: yes
Circularity Check
No circularity: empirical validation of neural approximation via imitation learning
full rationale
The paper trains a CNN via supervised imitation on multi-channel grid encodings of PHD beliefs, agent pose, visitation, and boundaries generated by AS/ASI planners, then reports simulation results showing comparable detection rates on uniform and clustered target distributions with orders-of-magnitude lower online computation. This is a standard function-approximation pipeline with direct empirical benchmarking against the source planners; no equation or claim reduces by construction to a fitted parameter, self-definition, or load-bearing self-citation. The derivation chain is self-contained against external simulation benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Aguilar, G., Bravo, L., Ruiz, U., Murrieta-Cid, R., and Chav ez, E. (2019). A distributed algorithm for exploration of unknown envi- ronments with multiple robots. IEEE Transactions on Control of Network Systems , 95(2), 1021–1040
work page 2019
-
[2]
Alessio, A. and Bemporad, A. (2009). Nonlinear Model Predictive Control, volume 384, chapter A Survey on Explicit Model Predic- tive Control. Springer
work page 2009
-
[3]
Chen, F., Bai, S., Shan, T., and Englot, B. (2019). Self-lear ning exploration and mapping for mobile robots via deep reinforc ement learning. AIAA Scitech 2019 Forum , 2758–2770
work page 2019
-
[4]
Cooper, J.R. (2020). Optimal Multi-Agent Search and Rescue Using Potential Field Theory , chapter 3, 1–9. Autonomy
work page 2020
-
[5]
Dames, P. and Kumar, V. (2015). Autonomous localization of a n unknown number of targets without data association using te ams of mobile sensors. IEEE Transaction on Automation Science and Engineering, 12(2), 850–864
work page 2015
- [6]
-
[7]
Olcay, E., Bodeit, J., and Lohmann, B. (2020). Sensor-based exploration of an unknown area with multiple mobile agents. In 21st IF AC World Congress , 2405–8963. Berlin, Germany
work page 2020
-
[8]
Pallin, M., Rashid, J., and ¨Ogren, P. (2021). Formulation and solu- tion of the multi-agent concurrent search and rescue proble m. In IEEE International Symposium on Safety, Security, and Resc ue Robotics, 27–33. New York, NY, USA
work page 2021
-
[9]
Polycarpou, M.M. (2021). A cooperative multiagent probabi listic framework for search and track missions. IEEE Transactions on Control of Network Systems , 8(2), 847–857. S¨ ut˝ o, B., Codrean, A., and Lendek, Zs. (2023). Optimal con trol of multiple drones for obstacle avoidance. In Preprints of 22nd IF AC World Congress , 5980–5986. Yokohama, Japan
work page 2021
-
[10]
Vo, B.N., Singh, S., and Doucet, A. (2005). Sequential Monte Carlo methods for multitarget filtering with RFS. IEEE Transactions on Aerospace and Electronic Systems , 41(4), 1224–1245
work page 2005
-
[11]
Xu, X., Yang, L., Meng, W., Cai, Q., and Fu, M. (2019). Multi- agent coverage search in unknown environments with obstacl es: A survey. In China Control Conference , 2317–2322. Guangzhou, China
work page 2019
-
[12]
Yuanda, W., Haibo, H., and Changyin, S. (2018). Learning to navigate through complex dynamic environment with modular DRL. IEEE Transactions on Games , 10(4), 400–412
work page 2018
-
[13]
Ali, F. (2017). Target-driven visual navigation in indoor s cenes using deep reinforcement learning. In 2017 IEEE International Conference on Robotics and Automation (ICRA) , 3357–3364
work page 2017
-
[14]
Zhang, R., W ang, J., Ge, J., and Huang, Q. (2024). Multiagent cooperative search learning with intermittent communicat ion. IEEE Intelligent Systems , 39(02), 11–20
work page 2024
-
[15]
Zhong, J., Ming, L., Armin, G., Jianya, G., Deren, L., Mingji e, L., and Jiangying, Q. (2024). Application of photogrammetr ic computer vision and deep learning in high-resolution under water mapping: A case study of shallow-water coral reefs. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Informat ion Sciences, 2, 247–254
work page 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.