Isospectral Steering
Pith reviewed 2026-05-08 05:36 UTC · model grok-4.3
The pith
Isospectral steering characterizes reachable covariances for the differential Lyapunov equation with fixed gain-matrix eigenvalues.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We introduce isospectral steering of the differential Lyapunov equation, in which control is effected exclusively by modulating the eigenvectors of a symmetric gain matrix while its eigenvalues are held constant. For any prescribed terminal time and any choice of those fixed eigenvalues we describe the reachable set of covariances.
What carries the argument
Isospectral constraint on the symmetric time-varying gain matrix, which fixes its eigenvalues while allowing arbitrary rotation of its eigenvectors.
If this is right
- The reachable terminal covariances depend only on the chosen time horizon and the fixed eigenvalues of the gain matrix.
- Control objectives that penalize shear or attention are satisfied by keeping eigenvalues constant and modulating eigenvectors alone.
- The reachable-set description follows from the representation of the steering map as a convex combination of extremal rotations linked by the Birkhoff-von Neumann theorem.
Where Pith is reading between the lines
- The same eigenvector-modulation idea may apply directly to other linear matrix differential equations whenever preservation of spectral properties is physically required.
- Numerical verification of the reachable-set boundary for low-dimensional cases would provide an immediate test of the completeness claim.
- The connection to doubly stochastic matrices suggests that discrete-time analogues could be obtained by replacing continuous rotations with products of permutation matrices.
Load-bearing premise
That the reachable set of covariances can be completely characterized under the sole requirement that the gain matrix keep constant eigenvalues, without further restrictions on the possible eigenvector trajectories.
What would settle it
An explicit covariance matrix and terminal time for which a gain matrix with the stated fixed eigenvalues can be constructed that reaches it, yet the matrix lies outside the reachable set given by the paper's description.
Figures

read the original abstract
We study the controllability of the differential Lyapunov equation under isospectral rotation of a linear gradient field. Specifically, control is effected by a symmetric time-varying gain-matrix constrained to have fixed eigenvalues; that is, by exclusively modulating the eigen-vectors of the state matrix and not its eigenvalues. Motivation for this problem stems from a certain type of control objectives (minimum shear/attention) aimed to reduce anisotropic deformation when ensembles are steered by a common law--optimality necessitates constancy of eigenvalues. In the paper we introduce and motivate this type of isospectral steering, and describe the reachable set of covariances for any specified terminal time and eigenvalues of the gain matrix. The theory we develop is intimately linked to multilinear algebra as well as to positive linear algebra and the Birkoff-von Neumann theorem for doubly stochastic matrices.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces isospectral steering for the differential Lyapunov equation, where control is realized by a symmetric time-varying gain matrix K(t) whose eigenvalues are held fixed while its eigenvectors are modulated. It motivates the setting from control objectives that minimize shear or attention (hence require constant eigenvalues) and claims to characterize the reachable set of terminal covariances P(T) for arbitrary terminal time T and arbitrary fixed spectrum of K, via a transformation to a co-rotating frame and an appeal to multilinear algebra together with the Birkhoff-von Neumann theorem on doubly stochastic matrices.
Significance. If the reachable-set description is shown to be both algebraically correct and attainable under continuous orthogonal paths, the result would supply a concrete, parameter-dependent controllability statement for a practically motivated subclass of Lyapunov systems. The explicit link to positive linear algebra and Birkhoff-von Neumann is a distinctive feature that could be useful in ensemble-control applications where anisotropic deformation must be limited.
major comments (1)
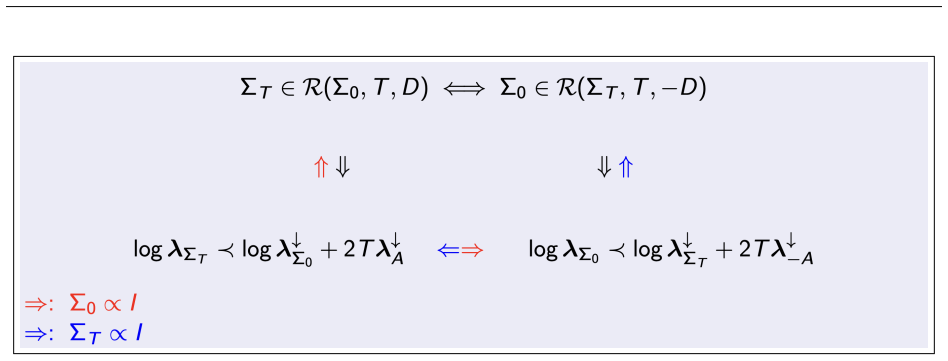
- [Section describing the reachable set (Theorem on Birkhoff-von Neumann characterization)] The central claim that the reachable set of Q(T) (and hence P(T)) is fully described by the Birkhoff-von Neumann convex hull of permutation matrices (or doubly stochastic matrices) does not verify that every point in this algebraic set is attainable by a continuous, integrable skew-symmetric matrix function Omega(t) on the finite interval [0,T]. In the co-rotating dynamics dot{Q} = [Q, Omega] - (D Q + Q D), the simultaneous presence of the commutator mixing term and the fixed drift may render certain convex combinations unreachable for small T because of the topology of the orthogonal group; this attainability gap is load-bearing for the stated description of the reachable set.
minor comments (2)
- [Abstract] The abstract asserts a complete description of the reachable set yet supplies neither a proof sketch nor an illustrative low-dimensional example, which hinders immediate assessment of the technical contribution.
- [Preliminaries / transformation to co-rotating frame] Notation for the co-rotating frame (Q = U^T P U) and the drift matrix D should be introduced with explicit reference to the original Lyapunov equation to avoid ambiguity when the eigenvalues of K are changed.
Simulated Author's Rebuttal
We thank the referee for their careful reading of the manuscript and for identifying the key point concerning the attainability of points in the Birkhoff-von Neumann convex hull via continuous controls. We provide a point-by-point response below and will incorporate clarifications in the revised version.
read point-by-point responses
-
Referee: [Section describing the reachable set (Theorem on Birkhoff-von Neumann characterization)] The central claim that the reachable set of Q(T) (and hence P(T)) is fully described by the Birkhoff-von Neumann convex hull of permutation matrices (or doubly stochastic matrices) does not verify that every point in this algebraic set is attainable by a continuous, integrable skew-symmetric matrix function Omega(t) on the finite interval [0,T]. In the co-rotating dynamics dot{Q} = [Q, Omega] - (D Q + Q D), the simultaneous presence of the commutator mixing term and the fixed drift may render certain convex combinations unreachable for small T because of the topology of the orthogonal group; this attainability gap is load-bearing for the stated description of the reachable set.
Authors: We agree that a rigorous verification of attainability is essential for the claim. The manuscript reduces the problem to the co-rotating frame where the dynamics are dot{Q} = [Q, Omega] - (D Q + Q D) with Omega skew-symmetric. To show that any doubly stochastic matrix (hence any point in the convex hull) is attainable, we note that any such matrix can be realized as the time-averaged effect of switching between permutation matrices, each corresponding to a constant orthogonal transformation. Since the orthogonal group is path-connected in its connected components and the magnitude of Omega(t) is not bounded a priori (eigenvector rotation rates are free controls), any continuous path in the group can be executed in arbitrarily short time by increasing the speed. The fixed drift term can be integrated explicitly over each subinterval of the partition, and the durations adjusted accordingly. For any T > 0, we can choose a sufficiently fine partition and scale the speeds to fit within [0, T]. We will revise the manuscript to include an explicit construction of such an Omega(t) for a representative point in the interior of the convex hull, thereby closing the gap. This addresses the concern for both small and large T. revision: partial
Circularity Check
No circularity; reachable-set claim rests on external algebraic theorems
full rationale
The paper introduces isospectral steering for the differential Lyapunov equation and claims a characterization of the reachable covariances via multilinear algebra and the Birkhoff-von Neumann theorem on doubly-stochastic matrices. These are independent, externally verifiable results not derived from the present work. No self-definitional loops, fitted inputs renamed as predictions, or load-bearing self-citations appear; the derivation applies standard controllability analysis under the isospectral constraint without reducing any central claim to its own inputs by construction. The continuous-time path constraints noted in the skeptic headline affect correctness but do not create circularity.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
On the Isospectral Nature of Minimum-Shear Covariance Control
Rami Sabbagh, Ahmed Eldesoukey, Mohamed Abdelgalil, and Tryphon T. Georgiou. On the isospectral nature of minimum-shear covariance control.arXiv preprint arXiv:2604.07608, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
- [2]
-
[3]
Ralph Sabbagh, Asmaa Eldesoukey, Mahmoud Abdelgalil, and Tryphon T Georgiou. Minimizing control atten- tion: The linear gauss-markov paradigm.IEEE Transactions on Automatic Control, to appear, 2025
work page 2025
-
[4]
A survey of multi-agent formation control.Automat- ica, 53:424–440, 2015
Kwang-Kyo Oh, Myoung-Chul Park, and Hyo-Sung Ahn. A survey of multi-agent formation control.Automat- ica, 53:424–440, 2015
work page 2015
-
[5]
Beard, Jonathan Lawton, and Fred Y
Randal W. Beard, Jonathan Lawton, and Fred Y . Hadaegh. A coordination architecture for spacecraft formation control.IEEE Transactions on Control Systems Technology, 9(6):777–790, 2001
work page 2001
-
[6]
Daniel P. Scharf, Fred Y . Hadaegh, and Scott R. Ploen. A survey of spacecraft formation flying guidance and control. Part II: control. InProceedings of the 2004 American Control Conference, pages 2976–2985, 2004
work page 2004
-
[7]
Daniela Rus and Michael T. Tolley. Design, fabrication and control of soft robots.Nature, 521(7553):467–475, 2015
work page 2015
-
[8]
Ron Pelrine, Roy Kornbluh, Qibing Pei, and Jose Joseph. High-speed electrically actuated elastomers with strain greater than 100%.Science, 287(5454):836–839, 2000
work page 2000
-
[9]
Acoustic tweezers for the life sciences.Nature Methods, 15(12):1021–1028, 2018
Adem Ozcelik, Joseph Rufo, Feng Guo, Yuyang Gu, Peng Li, James Lata, and Tony Jun Huang. Acoustic tweezers for the life sciences.Nature Methods, 15(12):1021–1028, 2018
work page 2018
-
[10]
Xiaoyun Ding, Peng Li, Sz-Chin Steven Lin, Zackary S. Stratton, Nitesh Nama, Feng Guo, Daniel Slotcavage, Xiaole Mao, Jinjie Shi, Francesco Costanzo, and Tony Jun Huang. On-chip manipulation of single micropar- ticles, cells, and organisms using surface acoustic waves.Proceedings of the National Academy of Sciences, 109(28):11105–11109, 2012
work page 2012
-
[11]
L. B. Leverett, J. D. Hellums, C. P. Alfrey, and E. C. Lynch. Red blood cell damage by shear stress.Biophysical Journal, 12(3):257–273, 1972
work page 1972
-
[12]
W. V . Mars and A. Fatemi. Factors that affect the fatigue life of rubber: a literature survey.Rubber Chemistry and Technology, 77(3):391–412, 2004
work page 2004
-
[13]
Holonomic quantum computation.Physics Letters A, 264(2-3):94–99, 1999
Paolo Zanardi and Mario Rasetti. Holonomic quantum computation.Physics Letters A, 264(2-3):94–99, 1999
work page 1999
-
[14]
V Karimipour and N Majd. Exact solutions for a universal set of quantum gates on a family of isospectral spin chains.Physical Review A—Atomic, Molecular, and Optical Physics, 72(5):052305, 2005
work page 2005
-
[15]
When is a linear control system optimal?Journal of Basic Engineering, pages 51–60, 1964
Rudolf Emil Kalman. When is a linear control system optimal?Journal of Basic Engineering, pages 51–60, 1964
work page 1964
-
[16]
Marshall, Ingram Olkin, and Barry C
Albert W. Marshall, Ingram Olkin, and Barry C. Arnold.Inequalities: Theory of Majorization and Its Applica- tions. Springer Series in Statistics. Springer, New York, 2nd edition, 2011
work page 2011
-
[17]
Harley Flanders.Differential Forms with Applications to the Physical Sciences. Dover Publications, New York,
-
[18]
Reprint of the 1963 Academic Press edition
work page 1963
-
[19]
Mahmoud Abdelgalil and Tryphon T Georgiou. The holonomy of optimal mass transport: The gaussian-linear case.IEEE Transactions on Automatic Control, pages 931–945, 2026. 16
work page 2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.