Improving Sensing Coverage and Compliance of 3D-Printed Artificial Skins Through Multi-Modal Sensing and Soft Materials
Pith reviewed 2026-05-07 15:51 UTC · model grok-4.3
The pith
Hybrid ToF and self-capacitance sensors with soft coverings enable multi-modal detection on robot arms.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
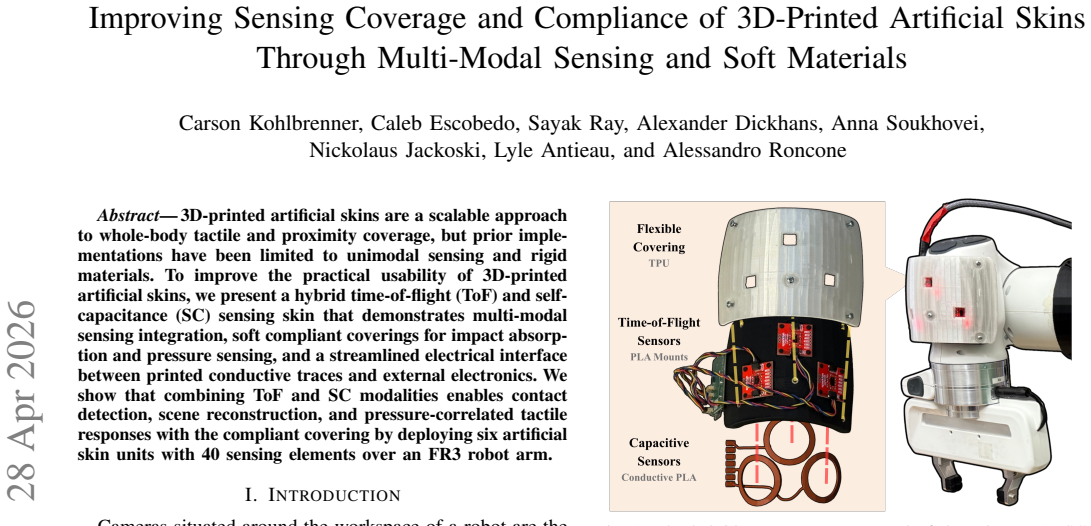
The authors present a hybrid sensing skin that integrates time-of-flight and self-capacitance modalities with a soft compliant covering. This combination allows the skin to detect contacts, reconstruct scenes, and provide tactile responses correlated with pressure while absorbing impacts. The system uses six units with 40 sensing elements on an FR3 robot arm, supported by a streamlined electrical interface between printed conductive traces and external electronics.
What carries the argument
hybrid time-of-flight (ToF) and self-capacitance (SC) sensing skin with soft compliant covering and streamlined electrical interface
Load-bearing premise
The soft compliant covering does not significantly degrade ToF or SC sensor performance and the electrical interface remains reliable under robot motion and impacts.
What would settle it
Measuring sensor accuracy, response consistency, and signal quality before and after adding the soft covering while running the robot arm through repeated motions and controlled impacts would confirm or refute the integration.
Figures

read the original abstract
3D-printed artificial skins are a scalable approach to whole-body tactile and proximity coverage, but prior implementations have been limited to unimodal sensing and rigid materials. To improve the practical usability of 3D-printed artificial skins, we present a hybrid time-of-flight (ToF) and self-capacitance (SC) sensing skin that demonstrates multi-modal sensing integration, soft compliant coverings for impact absorption and pressure sensing, and a streamlined electrical interface between printed conductive traces and external electronics. We show that combining ToF and SC modalities enables contact detection, scene reconstruction, and pressure-correlated tactile responses with the compliant covering by deploying six artificial skin units with 40 sensing elements over an FR3 robot arm.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a hybrid time-of-flight (ToF) and self-capacitance (SC) 3D-printed artificial skin that incorporates soft compliant coverings for impact absorption and pressure sensing, along with a streamlined electrical interface. It claims that deploying six such skin units (40 sensing elements total) over an FR3 robot arm enables contact detection, scene reconstruction, and pressure-correlated tactile responses through the multi-modal integration.
Significance. If validated, the work could advance practical whole-body sensing for robots by addressing limitations of prior unimodal and rigid 3D-printed skins. The integration of compliance with multi-modal sensing addresses a relevant gap, but the absence of quantitative validation data means the significance is currently prospective.
major comments (1)
- [Abstract and deployment description] Abstract and deployment description: the central claim that combining ToF and SC modalities with the compliant covering enables contact detection, scene reconstruction, and pressure-correlated responses requires evidence that the soft layer does not materially degrade optical paths or capacitive coupling. No before/after quantitative metrics are supplied for ToF ranging error or SC pressure-response curves with versus without the covering, nor for trace-interface continuity under repeated arm trajectories or impacts.
Simulated Author's Rebuttal
We thank the referee for the detailed review and constructive criticism. The point raised about quantitative validation of the soft layer's effect on sensing performance is well-taken and will be addressed through revisions to strengthen the manuscript.
read point-by-point responses
-
Referee: [Abstract and deployment description] Abstract and deployment description: the central claim that combining ToF and SC modalities with the compliant covering enables contact detection, scene reconstruction, and pressure-correlated responses requires evidence that the soft layer does not materially degrade optical paths or capacitive coupling. No before/after quantitative metrics are supplied for ToF ranging error or SC pressure-response curves with versus without the covering, nor for trace-interface continuity under repeated arm trajectories or impacts.
Authors: We agree that explicit before-and-after metrics would provide stronger support for the claim that the compliant covering preserves functionality. The current manuscript demonstrates successful multi-modal operation with the covering installed via the six-unit FR3 arm deployment, but does not include direct comparative data. In the revision we will add: (1) ToF ranging error statistics measured with and without the soft layer on identical test setups; (2) SC pressure-response curves for both configurations; and (3) continuity and signal-stability results for the printed traces under repeated arm trajectories and controlled impacts. These additions will appear in the experimental results section with corresponding figures. revision: yes
Circularity Check
No circularity: experimental hardware demonstration without derivations
full rationale
The paper describes a physical deployment of hybrid ToF/SC sensing units with soft coverings on an FR3 robot arm. No equations, fitted parameters, predictions from inputs, or derivation chains appear in the abstract or claims. The work consists of hardware integration, multi-modal sensing demonstration, and empirical coverage results rather than any theoretical reduction of outputs to inputs by construction. No self-citations, uniqueness theorems, or ansatzes are invoked as load-bearing steps. This is a standard non-circular experimental report.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Proximity perception in human- centered robotics: A survey on sensing systems and applications,
S. E. Navarro, S. M ¨uhlbacher-Karrer, H. Alagi, H. Zangl, K. Koyama, B. Hein, C. Duriez, and J. R. Smith, “Proximity perception in human- centered robotics: A survey on sensing systems and applications,” IEEE Transactions on Robotics, 2021
2021
-
[2]
Large-area soft e-skin: The challenges beyond sensor designs,
R. Dahiya, N. Yogeswaran, F. Liu, L. Manjakkal, E. Burdet, V . Hay- ward, and H. J ¨orntell, “Large-area soft e-skin: The challenges beyond sensor designs,”Proceedings of the IEEE, vol. 107, no. 10, pp. 2016– 2033, 2019
2016
-
[3]
Sensor-enabled safety systems for human–robot collaboration: A review,
C. Scholz, H.-L. Cao, E. Imrith, N. Roshandel, H. Firouzipouyaei, A. Burkiewicz, M. Amighi, S. Menet, D. W. Sisavath, A. Paolillo et al., “Sensor-enabled safety systems for human–robot collaboration: A review,”IEEE Sensors Journal, vol. 25, no. 1, pp. 65–88, 2024
2024
-
[4]
arXiv preprint arXiv:2412.00396 (2024)
D. Kim, M. Srouji, C. Chen, and J. Zhang, “Armor: Egocentric per- ception for humanoid robot collision avoidance and motion planning,” arXiv preprint arXiv:2412.00396, 2024
-
[5]
A digital twin-based large-area robot skin system for safer human-centered healthcare robots toward healthcare 4.0,
G. Yang, Z. Ye, H. Wu, C. Li, R. Wang, D. Kong, Z. Hou, H. Wang, X. Huang, Z. Panget al., “A digital twin-based large-area robot skin system for safer human-centered healthcare robots toward healthcare 4.0,”IEEE Transactions on Medical Robotics and Bionics, vol. 6, no. 3, pp. 1104–1115, 2024
2024
-
[6]
A self- capacitance proximity e-skin with long-range sensibility for robotic arm environment perception,
Z. Liu, D. Chen, J. Ma, D. Jia, T. Wang, and Q. Su, “A self- capacitance proximity e-skin with long-range sensibility for robotic arm environment perception,”IEEE Sensors Journal, vol. 23, no. 13, pp. 14 854–14 863, 2023
2023
-
[7]
Pro- totype of an intelligent textile based robot skin to expand potential applications for cobot’s,
K. Niquet, N. Patel, F. Schr ¨odel, M. Jahn, and S. Varelmann, “Pro- totype of an intelligent textile based robot skin to expand potential applications for cobot’s,” in2023 8th International Conference on Mechanical Engineering and Robotics Research (ICMERR). IEEE, 2023, pp. 12–17
2023
-
[8]
Wrap-around string-like tof and self-capacitance combined sensor for robots,
S. Tsuji, “Wrap-around string-like tof and self-capacitance combined sensor for robots,”IEEJ Transactions on Electrical and Electronic Engineering, vol. 20, no. 5, pp. 688–695, 2025
2025
-
[9]
Electromagnetic field & tof sensor fusion for advanced perceptual capability of robots,
H. Yim, H. Kang, T. D. Nguyen, and H. R. Choi, “Electromagnetic field & tof sensor fusion for advanced perceptual capability of robots,” IEEE Robotics and Automation Letters, vol. 9, no. 5, pp. 4846–4853, 2024
2024
-
[10]
Gentact toolbox: A computational design pipeline to procedurally generate context-driven 3d printed whole-body artificial skins,
C. Kohlbrenner, C. Escobedo, S. S. Bae, A. Dickhans, and A. Roncone, “Gentact toolbox: A computational design pipeline to procedurally generate context-driven 3d printed whole-body artificial skins,” in2025 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2025, pp. 4716–4722
2025
-
[11]
Design, mapping, and contact anticipation with 3d- printed whole-body tactile and proximity sensors,
C. Kohlbrenner, A. Soukhovei, C. Escobedo, N. Nechyporenko, and A. Roncone, “Design, mapping, and contact anticipation with 3d- printed whole-body tactile and proximity sensors,” in2026 IEEE International Conference on Robotics and Automation (ICRA), 2026
2026
-
[12]
Form-fitting, large-area sensor mounting for obstacle detection,
A. Soukhovei, C. Kohlbrenner, C. Escobedo, A. Gholmieh, A. Dick- hans, and A. Roncone, “Form-fitting, large-area sensor mounting for obstacle detection,”arXiv preprint arXiv:2603.23725, 2026
-
[13]
A flexible piezoresistive/self- capacitive hybrid force and proximity sensor to interface collaborative robots,
D. Fonseca, M. Safeea, and P. Neto, “A flexible piezoresistive/self- capacitive hybrid force and proximity sensor to interface collaborative robots,”IEEE Transactions on Industrial Informatics, vol. 19, pp. 2485–2495, 2023. [Online]. Available: https://api.semanticscholar.org/ CorpusID:248760168
2023
-
[14]
STMicroelectronics,VL53L5CX Datasheet: Multizone Time-of- Flight Ranging Sensor, STMicroelectronics, accessed: 2026-04-
2026
-
[15]
Available: https://cdn.sparkfun.com/assets/6/e/3/0/6/ vl53l5cx-datasheet.pdf
[Online]. Available: https://cdn.sparkfun.com/assets/6/e/3/0/6/ vl53l5cx-datasheet.pdf
-
[16]
An 1334 techniques for robust touch sensing design,
“An 1334 techniques for robust touch sensing design,” 2010. [Online]. Available: https://api.semanticscholar.org/CorpusID:11888772
2010
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.