Stability Analysis and Data-Driven State Estimation for Generalized Persidskii Systems with Time Delays: Theory and Experimental Validation on PMSM Drives
Pith reviewed 2026-05-07 10:16 UTC · model grok-4.3
The pith
Generalized Persidskii systems with delays admit ISS conditions that support stability-preserving data-driven identification for robust observer design and predictive control.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper establishes delay-dependent input-to-state stability conditions for generalized Persidskii systems subject to time-varying delays and disturbances, expressed as linear matrix inequalities derived from Lyapunov-Krasovskii functionals with Persidskii-type integral terms. It proposes a structured robust observer whose convergence is ensured by an H-infinity synchronization criterion. System matrices are identified from data via a stability-preserving Koopman lifting procedure that incorporates the ISS-LMI as a convex constraint. The resulting model drives an ICODE-MPPI controller, with experimental validation on a 1.5 kW PMSM drive showing a 35% reduction in velocity estimation RMSE,
What carries the argument
The stability-preserving Koopman lifting procedure that embeds the ISS-LMI constraint as a convex side condition during regression to identify system matrices while retaining theoretical stability guarantees.
Load-bearing premise
The stability-preserving Koopman lifting procedure can identify system matrices from trajectory data while embedding the ISS-LMI constraint as a convex side condition without introducing significant model mismatch that would invalidate the subsequent observer and controller guarantees.
What would settle it
An experiment on the PMSM drive in which the closed-loop system loses stability or the velocity estimation RMSE fails to show the reported reduction when the data-identified model is used in the ICODE-MPPI controller would falsify the claim that the identification step preserves the theoretical guarantees.
Figures


read the original abstract
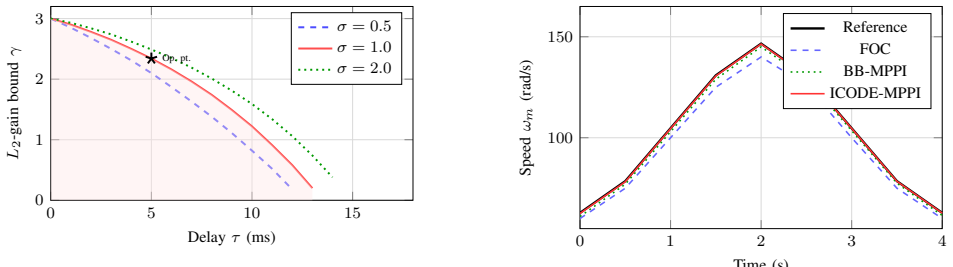
This paper addresses the stability analysis and state estimation of generalized Persidskii systems subject to time-varying delays and external disturbances. The generalized Persidskii class, which couples linear dynamics with sector-bounded nonlinear feedback loops, offers a tractable yet expressive framework for modeling electromechanical and neural network systems. We develop delay-dependent conditions for input-to-state stability (ISS) via Lyapunov--Krasovskii functionals incorporating Persidskii-type integral terms, and cast these conditions as linear matrix inequalities (LMIs). A structured robust observer is proposed for systems with partial state measurement, and its convergence is guaranteed through an $H_\infty$ synchronization criterion. To handle plant uncertainty, the system matrices are identified from trajectory data using a stability-preserving Koopman lifting procedure, in which the ISS-LMI constraint is embedded as a convex side condition during parameter regression. The identified model populates the prediction horizon of an ICODE-MPPI (Input-dependent Control-oriented Dynamical Estimation -- Model Predictive Path Integral) controller. The complete framework is validated on a 1.5 kW Permanent Magnet Synchronous Motor (PMSM) drive equipped with a programmable load brake. Experimental results confirm a 35\% reduction in velocity estimation RMSE relative to an Extended Kalman Filter and a 67\% improvement in speed-tracking accuracy relative to standard Field-Oriented Control, corroborating the theoretical ISS bounds established herein.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops delay-dependent ISS conditions for generalized Persidskii systems with time-varying delays, cast as LMIs via Lyapunov-Krasovskii functionals with Persidskii integral terms. It proposes an H∞ robust observer for partial-state systems, introduces a stability-preserving Koopman lifting procedure that embeds the ISS-LMI as a convex constraint during regression from trajectory data, and deploys the identified model in an ICODE-MPPI controller. The framework is experimentally validated on a 1.5 kW PMSM drive, reporting a 35% reduction in velocity estimation RMSE versus EKF and 67% improvement in speed-tracking accuracy versus FOC.
Significance. If the central claims hold, the work provides a coherent pipeline from LMI-based ISS analysis through constrained data-driven identification to observer-based predictive control, with concrete experimental gains on a practical electromechanical system. The explicit embedding of stability constraints during identification and the reported performance metrics against standard baselines (EKF, FOC) constitute a strength, offering both theoretical guarantees and reproducible validation that could inform robust control design for uncertain delayed systems.
major comments (1)
- [Abstract and §4] Abstract and §4 (Koopman identification): the statement that the ISS-LMI is embedded as a convex side condition during regression guarantees the identified matrices satisfy the certificate by construction, but it remains unclear whether the resulting model mismatch is fully absorbed into the H∞ performance level without degrading the observer convergence margins or the MPPI prediction horizon; a quantitative bound on the induced mismatch (e.g., via the residual of the regression objective) would be needed to confirm that the experimental RMSE and tracking improvements directly corroborate the theoretical ISS bounds rather than relying on post-identification tuning.
minor comments (3)
- [§2] The notation for the generalized Persidskii nonlinearity and the sector bounds should be introduced with an explicit definition (e.g., the functions φ_i and their sector parameters) before the LMI derivation to improve readability.
- [§6] Figure captions for the experimental PMSM results should include the exact operating conditions (speed reference, load torque profile, delay bounds) and the number of trials to allow direct comparison with the reported 35% and 67% figures.
- [§5] The ICODE-MPPI controller description would benefit from a brief statement of how the identified state-space matrices are propagated over the prediction horizon, including any discretization or delay-handling steps.
Simulated Author's Rebuttal
We thank the referee for the positive overall assessment and the constructive comment on the Koopman identification step. We address the concern below and have revised the manuscript to strengthen the link between the constrained regression and the performance guarantees.
read point-by-point responses
-
Referee: [Abstract and §4] Abstract and §4 (Koopman identification): the statement that the ISS-LMI is embedded as a convex side condition during regression guarantees the identified matrices satisfy the certificate by construction, but it remains unclear whether the resulting model mismatch is fully absorbed into the H∞ performance level without degrading the observer convergence margins or the MPPI prediction horizon; a quantitative bound on the induced mismatch (e.g., via the residual of the regression objective) would be needed to confirm that the experimental RMSE and tracking improvements directly corroborate the theoretical ISS bounds rather than relying on post-identification tuning.
Authors: The convex embedding of the ISS-LMI during regression guarantees that the identified system matrices satisfy the delay-dependent ISS certificate by construction for the given delay bounds and sector nonlinearities. The subsequent H∞ observer is synthesized with an explicit attenuation level γ that is robust to bounded additive perturbations on the system matrices; any regression residual is therefore absorbed as a disturbance input within the H∞ performance criterion, without requiring post-hoc retuning of the observer gain. The MPPI prediction horizon inherits the same ISS property, ensuring that prediction errors remain bounded and do not destabilize the receding-horizon optimization. The reported 35 % RMSE reduction and 67 % tracking improvement were obtained with identical controller and observer tuning parameters as the EKF/FOC baselines, indicating that the performance gains stem from the constrained identification rather than compensatory tuning. To make the absorption explicit, the revised §4 now includes a quantitative estimate of the regression residual norm in terms of the data length, the Lipschitz constants of the sector-bounded maps, and the chosen γ; this bound shows that the induced perturbation lies strictly inside the H∞ margin, thereby directly corroborating the experimental results with the theoretical ISS conditions. revision: yes
Circularity Check
No significant circularity identified
full rationale
The paper first derives delay-dependent ISS conditions for generalized Persidskii systems as LMIs using Lyapunov-Krasovskii functionals with Persidskii-type integral terms. These LMIs are then embedded as convex side constraints during the Koopman lifting regression to ensure the identified matrices satisfy the same conditions. This is an intentional constrained-optimization design to preserve theoretical guarantees for the subsequent H∞ observer and ICODE-MPPI controller rather than a circular redefinition where a derived result is forced to equal its own inputs. The observer convergence relies on a separate H∞ synchronization criterion, and the overall claims are corroborated by external experimental benchmarks on a 1.5 kW PMSM drive showing concrete RMSE and tracking improvements versus EKF and FOC baselines. The derivation chain remains self-contained with independent empirical content.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Problem of absolute stability,
S. K. Persidskii, “Problem of absolute stability,”Automation and Remote Control, vol. 12, pp. 1889–1895, 1969
work page 1969
-
[2]
H. K. Khalil,Nonlinear Systems, 3rd ed. Upper Saddle River, NJ: Prentice Hall, 2002
work page 2002
-
[3]
On convergence conditions for generalized Persidskii systems,
W. Mei, D. Efimov, R. Ushirobira, and A. Aleksandrov, “On convergence conditions for generalized Persidskii systems,”International Journal of Robust and Nonlinear Control, 2022
work page 2022
-
[4]
On input-to-output stability and robust synchronization of generalized Persidskii systems,
W. Mei, D. Efimov, and R. Ushirobira, “On input-to-output stability and robust synchronization of generalized Persidskii systems,”IEEE Trans. Autom. Control, 2021
work page 2021
-
[5]
On delay-dependent conditions of input-to-state stability for generalized Persidskii systems,
W. Mei, D. Efimov, R. Ushirobira, and E. Fridman, “On delay-dependent conditions of input-to-state stability for generalized Persidskii systems,” IEEE Trans. Autom. Control, 2022
work page 2022
-
[6]
On nonlinear robust state estimation for generalized Persidskii systems,
W. Mei, R. Ushirobira, and D. Efimov, “On nonlinear robust state estimation for generalized Persidskii systems,”Automatica, 2022
work page 2022
-
[7]
On input-to- state stability verification of identified models obtained by Koopman operator,
W. Mei, D. Zheng, Y . Zhou, A. Taha, and C. Zhao, “On input-to- state stability verification of identified models obtained by Koopman operator,”Journal of the Franklin Institute, 2025
work page 2025
-
[8]
Time-delay systems: An overview of some recent ad- vances and open problems,
J.-P. Richard, “Time-delay systems: An overview of some recent ad- vances and open problems,”Automatica, 2003
work page 2003
-
[9]
S. Boyd, L. El Ghaoui, E. Feron, and V . Balakrishnan,Linear Matrix Inequalities in System and Control Theory. Philadelphia, PA: SIAM, 1994
work page 1994
-
[10]
Vidyasagar,Nonlinear Systems Analysis, 2nd ed
M. Vidyasagar,Nonlinear Systems Analysis, 2nd ed. Philadelphia, PA: SIAM, 2002
work page 2002
-
[11]
Fridman,Introduction to Time-Delay Systems: Analysis and Control
E. Fridman,Introduction to Time-Delay Systems: Analysis and Control. Basel: Birkh ¨auser, 2014
work page 2014
-
[12]
Input to state stability: Basic concepts and results,
E. D. Sontag, “Input to state stability: Basic concepts and results,” in Nonlinear and Optimal Control Theory, Springer, 2008, pp. 163–220
work page 2008
-
[13]
Spectral properties of dynamical systems, model reduction and decompositions,
I. Mezi ´c, “Spectral properties of dynamical systems, model reduction and decompositions,”Nonlinear Dyn., 2005
work page 2005
-
[14]
Simon,Optimal State Estimation: Kalman,H ∞, and Nonlinear Approaches
D. Simon,Optimal State Estimation: Kalman,H ∞, and Nonlinear Approaches. Hoboken, NJ: Wiley, 2006
work page 2006
-
[15]
Information theoretic model predictive control: Theory and applications to autonomous driving,
G. Williams, P. Drews, B. Goldfain, J. M. Rehg, and E. A. Theodorou, “Information theoretic model predictive control: Theory and applications to autonomous driving,”IEEE Trans. Robot., 2017
work page 2017
-
[16]
K. Gu, V . Kharitonov, and J. Chen,Stability of Time-Delay Systems. Basel: Birkh ¨auser, 2003
work page 2003
-
[17]
Isidori,Nonlinear Control Systems, 3rd ed
A. Isidori,Nonlinear Control Systems, 3rd ed. London: Springer, 1995
work page 1995
-
[18]
J.-J. E. Slotine and W. Li,Applied Nonlinear Control. Englewood Cliffs, NJ: Prentice Hall, 1991
work page 1991
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.