Hierarchical Support Vector State Partitioning for Distilling Black Box Reinforcement Learning Policies
Pith reviewed 2026-06-30 23:50 UTC · model grok-4.3
The pith
SVSP partitions state-action data with linear SVMs to distill black-box RL policies into fewer interpretable subpolicies.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
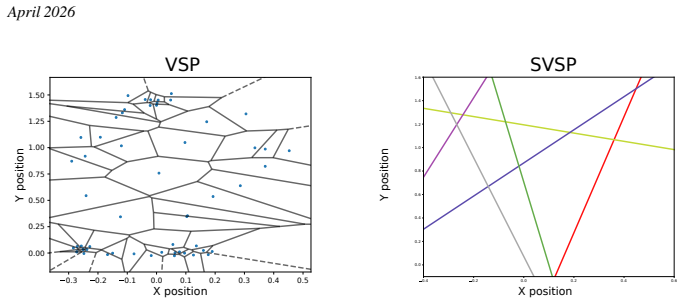
SVSP constructs a compact representation of a black-box policy by partitioning a distillation dataset of state-action pairs with linear support vector machine splits. The resulting subpolicies achieve a mean return 7.4 percent higher than Voronoi State Partitioning and 2.8 percent higher than the original TD3 policy while requiring 82.1 percent fewer subpolicies than VSP. The method thereby enables a more flexible distillation in which decision boundaries and surrogate models can be selected within a margin of the original black-box behavior.
What carries the argument
Linear support vector machine splits that divide the state vector space according to state-action pairs sampled from the black-box policy.
If this is right
- The distilled policy can exceed the mean return of the original black-box policy.
- The number of subpolicies can be reduced by more than 80 percent relative to prior partitioning techniques while preserving or improving performance.
- Decision boundaries can be chosen flexibly within a margin of the black-box behavior.
- Surrogate models inside each partition can also be selected within that same margin.
Where Pith is reading between the lines
- The same partitioning idea could be tested on policies trained in continuous control tasks beyond the environments used here to check whether the reduction in subpolicy count scales.
- If the SVM boundaries remain stable under small changes to the distillation dataset, the method might support incremental updates when new experience is collected.
- Inspecting the linear boundaries could reveal which state features most strongly influence the original policy's choices in different regions.
Load-bearing premise
The sampled state-action pairs are representative enough that linear SVM boundaries will produce subpolicies whose combined behavior matches the original policy over the entire state space.
What would settle it
A large performance gap between the combined subpolicies and the original policy on states outside the distillation dataset would falsify the claim.
Figures
read the original abstract
We introduce State Vector Space Partitioning (SVSP), a novel method to mimic a black box reinforcement learning policy using a set of human-interpretable subpolicies. By partitioning a distillation dataset of state action pairs with linear support vector machine splits, SVSP constructs a compact and structured representation of the original policy. Our method improves mean return by +7.4% over previous critic driven state partitioning attempts such as Voronoi State Partitioning (VSP) and +2.8% over the original TD3 policy, while reducing the number of required subpolicies against VSP by 82.1%. Our results pave the path towards a more flexible form of distillation where both the decision boundary and surrogate models can be chosen within a margin of the original black box behavior.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces State Vector Space Partitioning (SVSP), a method to distill black-box RL policies (e.g., TD3) into a hierarchy of interpretable subpolicies. It partitions a distillation dataset of state-action pairs using linear SVM splits to define regions, each assigned a surrogate subpolicy. The central empirical claim is that SVSP yields +7.4% higher mean return than Voronoi State Partitioning (VSP), +2.8% higher than the original TD3 teacher, and requires 82.1% fewer subpolicies than VSP.
Significance. If the reported gains prove robust across environments and seeds, SVSP would offer a concrete advance in policy distillation by replacing critic-driven or Voronoi partitioning with margin-based linear separators that are both compact and human-interpretable. The reduction in subpolicy count is a practically useful efficiency result. The work also highlights the possibility of choosing both the decision boundary and the local models within a controlled margin of the teacher.
major comments (2)
- [Abstract] Abstract: the quantitative claims (+7.4 % over VSP, +2.8 % over TD3, 82.1 % reduction in subpolicies) are stated without any reference to the number of environments, number of independent trials, statistical tests, error bars, or sensitivity to random seeds and hyper-parameters. These omissions make it impossible to judge whether the reported improvements are load-bearing for the central claim or could be artifacts of a single run.
- [Experiments] Experimental evaluation: the method's correctness rests on the assumption that a finite set of rollout trajectories is sufficiently dense for linear SVM boundaries to generalize across the full continuous state space. No coverage analysis, density plots, or out-of-distribution evaluation is supplied to test this assumption; without it the +2.8 % gain over the teacher itself cannot be confidently attributed to the partitioning rather than to incomplete sampling.
minor comments (2)
- [Method] Clarify in §3 how the subpolicies inside each SVM region are trained (e.g., on the same distillation data or on additional rollouts) and whether they are allowed to differ from the teacher only inside their assigned region.
- [Results] Add a table or figure that directly compares the number of support vectors / subpolicies and the achieved return for SVSP versus VSP across all reported environments.
Simulated Author's Rebuttal
We thank the referee for their constructive comments, which help clarify the presentation of our empirical results. We address each major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the quantitative claims (+7.4 % over VSP, +2.8 % over TD3, 82.1 % reduction in subpolicies) are stated without any reference to the number of environments, number of independent trials, statistical tests, error bars, or sensitivity to random seeds and hyper-parameters. These omissions make it impossible to judge whether the reported improvements are load-bearing for the central claim or could be artifacts of a single run.
Authors: We agree that the abstract would be strengthened by additional context. In the revised version we will expand the abstract to state that results are reported over five MuJoCo environments, five independent random seeds per environment, with mean and standard deviation, and that full statistical comparisons appear in Section 4. revision: yes
-
Referee: [Experiments] Experimental evaluation: the method's correctness rests on the assumption that a finite set of rollout trajectories is sufficiently dense for linear SVM boundaries to generalize across the full continuous state space. No coverage analysis, density plots, or out-of-distribution evaluation is supplied to test this assumption; without it the +2.8 % gain over the teacher itself cannot be confidently attributed to the partitioning rather than to incomplete sampling.
Authors: We acknowledge the value of explicit coverage analysis. The current experiments follow standard practice in policy distillation by collecting trajectories from the converged teacher on benchmark tasks; however, we will add a dedicated paragraph in Section 4 discussing trajectory density and include state-space coverage visualizations for the evaluated environments. The reported +2.8 % improvement is obtained under identical data-collection conditions for all compared methods, supporting attribution to the partitioning rather than sampling artifacts. revision: partial
Circularity Check
No circularity: empirical gains measured independently of method definition
full rationale
The paper defines SVSP via linear SVM partitioning of a distillation dataset of state-action pairs drawn from the black-box TD3 policy, then reports measured mean-return improvements on evaluation rollouts (+7.4% vs VSP, +2.8% vs teacher, 82.1% fewer subpolicies). These quantities are not obtained by algebraic rearrangement or by fitting the same parameters that define the partitions; they are external performance metrics. No equations, self-citations, or uniqueness theorems are invoked that would reduce the central claim to a tautology or to a fitted input renamed as prediction. The derivation therefore remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
& Guestrin, C
Ribeiro, M., Singh, S. & Guestrin, C. ” Why should i trust you?” Explaining the predictions of any classifier.Proceedings Of The 22nd ACM SIGKDD International Conference On Knowledge Discovery And Data Mining. pp. 1135-1144 (2016)
2016
-
[2]
Deproost, S., Steckelmacher, D. & Now ´e, A. Explainable RL Policies by Distilling to Locally- Specialized Linear Policies with V oronoi State Partitioning.ArXiv Preprint ArXiv:2511.13322. (2025)
-
[3]
& Preux, P
Kohler, H., Delfosse, Q., Akrour, R., Kersting, K. & Preux, P. Interpretable and Editable Programmatic Tree Policies for Reinforcement Learning. (2024,10,28)
2024
-
[4]
& Magazzeni, D
Coppens, Y ., Efthymiadis, K., Lenaerts, T., Now ´e, A., Miller, T., Weber, R. & Magazzeni, D. Distilling deep reinforcement learning policies in soft decision trees.Proceedings Of The IJCAI 2019 Workshop On Explainable Artificial Intelligence. pp. 1-6 (2019)
2019
-
[5]
& Puerto, J
Blanco, V ., Jap ´on, A. & Puerto, J. Multiclass optimal classification trees with svm-splits.Machine Learning.112, 4905-4928 (2023)
2023
-
[6]
& Zhokhov, P
Dhariwal, P., Hesse, C., Klimov, O., Nichol, A., Plappert, M., Radford, A., Schulman, J., Sidor, S., Wu, Y . & Zhokhov, P. OpenAI Baselines.GitHub Repository. (2017), https://github.com/openai/baselines
2017
-
[7]
& Solar-Lezama, A
Bastani, O., Pu, Y . & Solar-Lezama, A. Verifiable reinforcement learning via policy extraction.Advances In Neural Information Processing Systems.31(2018)
2018
-
[8]
Deproost, S., Steckelmacher, D. & Now ´e, A. Human-Readable Programs as Actors of Reinforcement Learning Agents Using Critic-Moderated Evolution.ArXiv Preprint ArXiv:2410.21940. (2024)
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.