Recognition: unknown
HDFlow: Hierarchical Diffusion-Flow Planning for Long-horizon Tasks
Pith reviewed 2026-05-08 16:22 UTC · model grok-4.3
The pith
HDFlow uses a high-level diffusion planner to generate subgoals in latent space and a low-level rectified flow planner to produce trajectories for long-horizon robotic tasks.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
HDFlow is a novel hierarchical planning framework that employs a high-level diffusion planner to generate sequences of strategic subgoals in a learned latent space, capitalizing on diffusion's exploratory capabilities, and these subgoals then guide a low-level rectified flow planner that generates smooth and dense trajectories by exploiting the speed and efficiency of ordinary differential equation-based trajectory generation.
What carries the argument
The Hierarchical Diffusion-Flow planner, which decomposes planning into a diffusion-based high-level subgoal generator operating in latent space and a conditioned rectified flow-based low-level trajectory generator.
If this is right
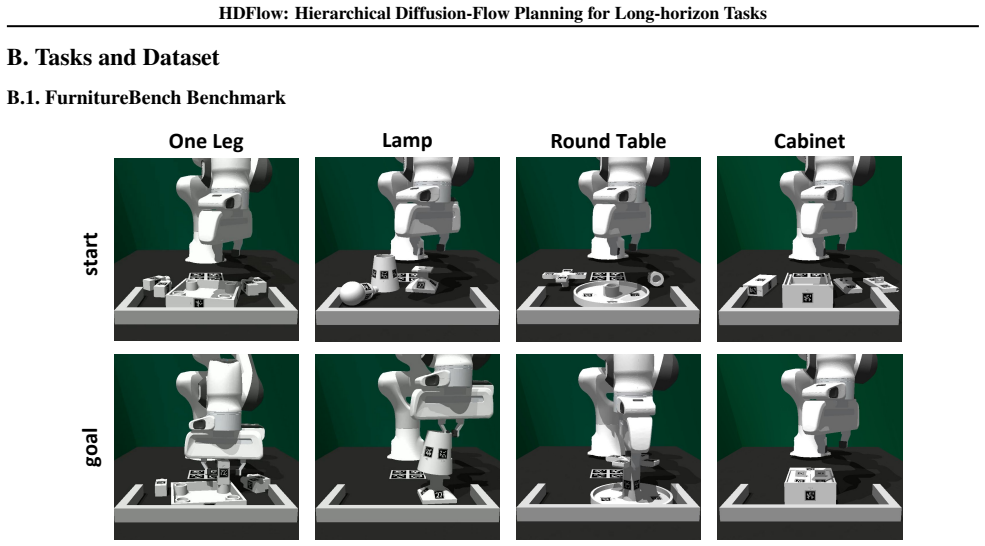
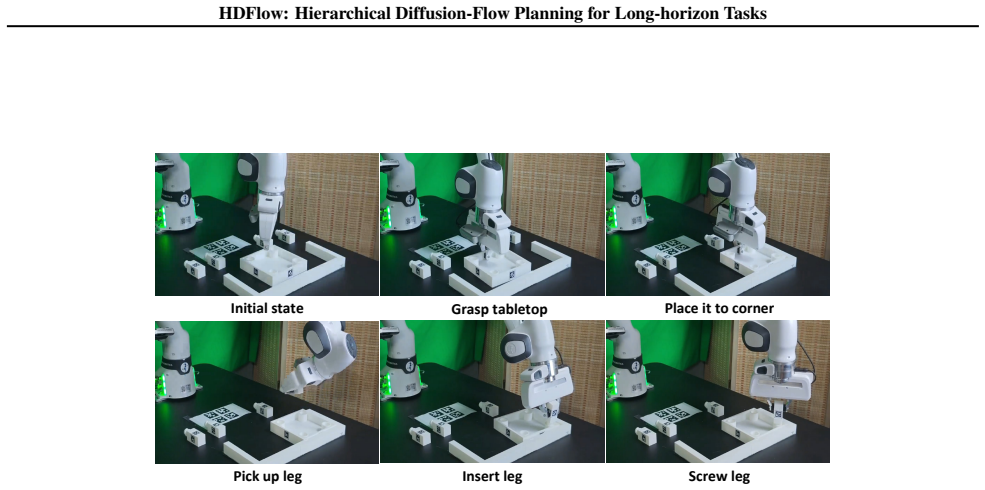
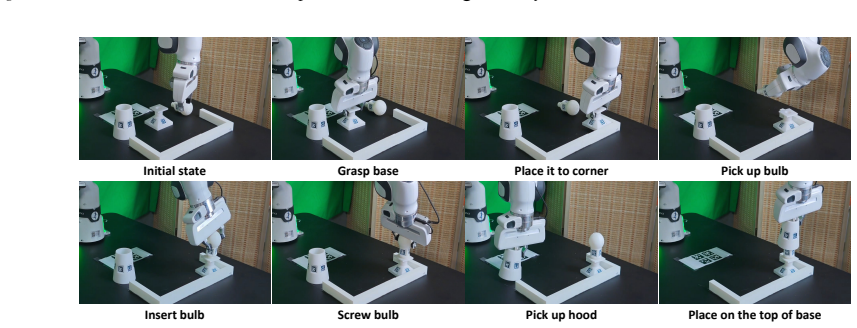
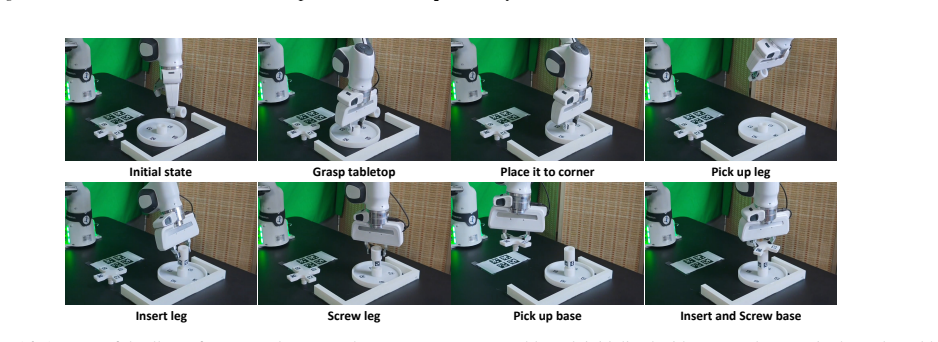
- HDFlow significantly outperforms state-of-the-art methods on four challenging furniture assembly tasks in both simulation and real-world settings.
- The approach generalizes to two long-horizon benchmarks that include diverse locomotion and manipulation tasks.
- High-level diffusion enables better exploration of subgoal sequences while low-level rectified flows deliver faster, smoother trajectory execution.
- Real-time execution becomes more practical because the low-level planner avoids iterative denoising.
Where Pith is reading between the lines
- If the separation of exploration at high level and efficiency at low level proves reliable, similar pairings of generative models could be tested on other robot control problems that mix discrete decisions with continuous motion.
- Adding explicit feasibility verification between levels might be needed for tasks where unreachable subgoals occur more often than in the evaluated benchmarks.
- The framework could connect to existing hierarchical reinforcement learning approaches that also separate abstract planning from low-level control.
- Testing the method on tasks with even longer horizons or higher uncertainty would clarify how far the current latent-space conditioning scales.
Load-bearing premise
The learned latent space and subgoal conditioning allow the low-level rectified flow planner to generate feasible trajectories without additional feasibility checks or recovery mechanisms when high-level subgoals are unreachable.
What would settle it
Frequent generation of unsafe or incomplete trajectories on real-world furniture assembly trials when the high-level planner outputs subgoals that the low-level planner cannot reach directly from the current state.
Figures












read the original abstract
Recent advances in generative models have shown promise in generating behavior plans for long-horizon, sparse reward tasks. While these approaches have achieved promising results, they often lack a principled framework for hierarchical decomposition and struggle with the computational demands of real-time execution, due to their iterative denoising process. In this work, we introduce Hierarchical Diffusion-Flow (HDFlow), a novel hierarchical planning framework that optimally leverages the strengths of diffusion and rectified flow models to overcome the limitations of single-paradigm generative planners. HDFlow employs a high-level diffusion planner to generate sequences of strategic subgoals in a learned latent space, capitalizing on diffusion's powerful exploratory capabilities. These subgoals then guide a low-level rectified flow planner that generates smooth and dense trajectories, exploiting the speed and efficiency of ordinary differential equation (ODE)-based trajectory generation. We evaluate HDFlow on four challenging furniture assembly tasks in both simulation and real-world, where it significantly outperforms state-of-the-art methods. Furthermore, we also showcase our method's generalizability on two long-horizon benchmarks comprising diverse locomotion and manipulation tasks. Project website: https://hdflow-page.github.io/
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces HDFlow, a hierarchical planning framework for long-horizon robotic tasks that uses a high-level diffusion model to generate sequences of subgoals in a learned latent space and a low-level rectified flow model to produce smooth trajectories via ODE integration. It claims to significantly outperform state-of-the-art methods on four furniture assembly tasks in both simulation and real-world settings while also generalizing to two long-horizon benchmarks involving diverse locomotion and manipulation tasks.
Significance. If the empirical claims hold with robust quantitative support, the work could meaningfully advance hierarchical generative planning by combining diffusion's exploratory strengths with the computational efficiency of rectified flows, addressing real-time execution challenges in sparse-reward settings. The approach offers a potential template for decomposing long-horizon problems without relying on a single generative paradigm.
major comments (2)
- Abstract: the central claim of significant outperformance on four furniture assembly tasks (and generalization to benchmarks) is presented without any quantitative results, error bars, ablation studies, training details, or failure mode analysis, rendering the empirical contribution unverifiable from the manuscript text.
- Method (high-level to low-level interface): the framework relies on the assumption that subgoals generated by the diffusion planner in latent space are always reachable by the low-level rectified flow planner through ODE integration, yet no feasibility checks, replanning triggers, or recovery mechanisms are described; this is load-bearing for the long-horizon claims, as unreachable subgoals would cause low-level failures.
minor comments (1)
- Abstract: the wording 'optimally leverages the strengths' is imprecise and should be replaced by a concrete description of the division of labor between diffusion and flow components.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback on our submission. We address each major comment below, indicating where revisions will be made to strengthen the manuscript.
read point-by-point responses
-
Referee: Abstract: the central claim of significant outperformance on four furniture assembly tasks (and generalization to benchmarks) is presented without any quantitative results, error bars, ablation studies, training details, or failure mode analysis, rendering the empirical contribution unverifiable from the manuscript text.
Authors: We acknowledge that the abstract, by design as a concise overview, omits specific quantitative details. The full manuscript contains these elements (error bars, ablations, training hyperparameters, and failure cases) in Sections 4–6. To address the concern directly, we will revise the abstract to include key quantitative results, such as average success rates and relative improvements over baselines on the furniture assembly tasks. revision: yes
-
Referee: Method (high-level to low-level interface): the framework relies on the assumption that subgoals generated by the diffusion planner in latent space are always reachable by the low-level rectified flow planner through ODE integration, yet no feasibility checks, replanning triggers, or recovery mechanisms are described; this is load-bearing for the long-horizon claims, as unreachable subgoals would cause low-level failures.
Authors: This is a fair observation. The latent space is jointly trained so that high-level subgoals lie within the distribution of states reachable by the low-level flow model, providing implicit alignment. However, the original manuscript does not explicitly describe feasibility verification or recovery procedures. We will add a dedicated paragraph in the Method section clarifying the high-to-low interface and introduce a lightweight recovery mechanism (high-level replanning triggered if the low-level ODE solver fails to reach the subgoal within a distance threshold after a fixed number of integration steps). revision: yes
Circularity Check
No circularity: framework combines existing models without self-referential derivations or fitted predictions
full rationale
The paper introduces HDFlow as a hierarchical architecture using a high-level diffusion planner for subgoals in latent space and a low-level rectified flow planner for trajectories via ODE integration. No equations, derivations, or first-principles results are presented that reduce to inputs by construction. Claims rest on empirical evaluation of the combined framework on furniture assembly and locomotion tasks, leveraging known properties of diffusion and flow models without renaming known results, smuggling ansatzes via self-citation, or treating fitted parameters as predictions. The central premise is a design choice, not a derived equivalence.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Ankile, L., Simeonov, A., Shenfeld, I., and Agrawal, P
URL https://openreview.net/forum?id= li7qeBbCR1t. Ankile, L., Simeonov, A., Shenfeld, I., and Agrawal, P. Juicer: Data-efficient imitation learning for robotic as- sembly. In2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 5096–5103. IEEE, 2024a. Ankile, L., Simeonov, A., Shenfeld, I., Torne, M., and Agrawal, P. From im...
-
[2]
URL https://api.semanticscholar.org/ CorpusID:270440444. Grathwohl, W., Wang, K.-C., Jacobsen, J.-H., Duvenaud, D., and Zemel, R. Learning the stein discrepancy for training and evaluating energy-based models without sampling. InInternational Conference on Machine Learning, pp. 3732–3747. PMLR, 2020. Gupta, A., Yu, L., Sohn, K., Gu, X., Hahn, M., Li, F.- ...
work page internal anchor Pith review arXiv 2020
-
[3]
Mastering Diverse Domains through World Models
URL https://openreview.net/forum?id= S1lOTC4tDS. Hafner, D., Lee, K.-H., Fischer, I., and Abbeel, P. Deep hierarchical planning from pixels. In Oh, A. H., Agarwal, A., Belgrave, D., and Cho, K. (eds.),Advances in Neural Information Processing Systems, 2022. URL https: //openreview.net/forum?id=wZk69kjy9_d. Hafner, D., Pasukonis, J., Ba, J., and Lillicrap,...
work page internal anchor Pith review arXiv 2022
-
[4]
Hao, C., Xiao, A., Xue, Z., and Soh, H
URL https://openreview.net/forum?id= IrM64DGB21. Hao, C., Xiao, A., Xue, Z., and Soh, H. Chd: Coupled hier- archical diffusion for long-horizon tasks.arXiv preprint arXiv:2505.07261, 2025. He, K., Chen, X., Xie, S., Li, Y ., Dollár, P., and Girshick, R. Masked autoencoders are scalable vision learners. In Proceedings of the IEEE/CVF conference on computer...
-
[5]
Janner, M., Du, Y ., Tenenbaum, J., and Levine, S
doi: 10.1109/LRA.2020.2974707. Janner, M., Du, Y ., Tenenbaum, J., and Levine, S. Planning with diffusion for flexible behavior synthesis. InInterna- tional Conference on Machine Learning, pp. 9902–9915. PMLR, 2022. Kaelbling, L. P. and Lozano-Pérez, T. Hierarchical task and motion planning in the now. In2011 IEEE international conference on robotics and ...
-
[6]
Taming Transformers for High-Resolution Image Synthesis , booktitle =
URL https://openreview.net/forum?id= EHG5Iv1mmb. Lee, Y ., Hu, E. S., and Lim, J. J. Ikea furniture assembly en- vironment for long-horizon complex manipulation tasks. In2021 ieee international conference on robotics and au- tomation (icra), pp. 6343–6349. IEEE, 2021. 10 HDFlow: Hierarchical Diffusion-Flow Planning for Long-horizon Tasks Li, W., Wang, X.,...
-
[7]
Shridhar, M., Manuelli, L., and Fox, D
URL https://openreview.net/forum?id= XMOaOigOQo. Shridhar, M., Manuelli, L., and Fox, D. Perceiver-actor: A multi-task transformer for robotic manipulation. In Liu, K., Kulic, D., and Ichnowski, J. (eds.),Proceedings of The 6th Conference on Robot Learning, volume 205 of Proceedings of Machine Learning Research, pp. 785–799. PMLR, 14–18 Dec 2023. URL http...
2023
-
[8]
Suárez-Ruiz, F
URL https://openreview.net/forum?id= PxTIG12RRHS. Suárez-Ruiz, F. and Pham, Q.-C. A framework for fine robotic assembly. In2016 IEEE international conference on robotics and automation (ICRA), pp. 421–426. IEEE, 2016. Wang, F. and Liu, H. Understanding the behaviour of con- trastive loss. InProceedings of the IEEE/CVF conference on computer vision and pat...
2016
-
[9]
Forward Process and Conditional Score.The forward diffusion process defines how a clean latent state z0 is noised toz ℓ at timestepℓ: zℓ = √¯αℓz0 + √ 1−¯αℓϵ, ϵ∼ N(0,I) From this, the conditional distribution q(z0|zℓ) can be expressed as a Gaussian with mean µ(zℓ, ℓ) = 1√¯αℓ (zℓ −√1−¯αℓϵ) and variance Σ(ℓ) = (1−¯αℓ)I. The gradient of the log-probability of...
-
[10]
True Optimal Energy Guidance.The true optimal energy guidance, ∇zℓ Etrue(zℓ|c), aims to steer the diffusion process towards regions of low energy (high success probability) in the z0 space. This gradient is given by the expectation of the score of q(z0|zℓ) weighted by the exponential of the negative energy function, effectively performing importance sampl...
-
[11]
Learned EBM Guidance.Our learned EBM guidance, ∇zℓ Eϕ(zℓ|c), typically approximates the gradient of the energy function at zℓ. In many practical implementations, this effectively corresponds to a linear weighting of the score of q(z0|zℓ)by the energy function itself, rather than its exponential: ∇zℓ Eϕ(zℓ|c)≈E q(z0|zℓ)[E(z0|c)∇zℓ logq(z 0|zℓ)] =− 1√1−¯αℓ ...
-
[12]
Analysis of the Guidance Gap.The EBM guidance gap is defined as ∆EBM(zℓ) =∥∇ zℓ Etrue(zℓ|c)− ∇ zℓ Eϕ(zℓ|c)∥2. Substituting the expressions, we get: ∆EBM(zℓ) = − 1√1−¯αℓ Eq(z0|zℓ)[ϵ|e−E(z0|c)]−E q(z0|zℓ)[E(z0|c)ϵ] 2 13 HDFlow: Hierarchical Diffusion-Flow Planning for Long-horizon Tasks Let δ(z0) = e−E(z0 |c) Eq(z0 |zℓ )[e−E(z0 |c)] −E(z 0|c) represent the ...
-
[13]
This is achieved by combining classifier-free guidance for the conditional termp(z|c) and EBM guidance for the success termp(y= 1|z, c), as detailed in Proof A.3
The guided sampling step samples from p(y= 1|z, c)p(z|c) , implementing the unconstrained Bayesian posterior. This is achieved by combining classifier-free guidance for the conditional termp(z|c) and EBM guidance for the success termp(y= 1|z, c), as detailed in Proof A.3
-
[14]
The projection step enforces the manifold constraint z∈ M by mapping to the closest point on the approximated manifold. By the principle of alternating projections and the contraction property of projection operators, this two-step process converges to a point that balances optimality (high success probability) with feasibility (remaining on the manifold)...
2025
-
[15]
The RSSM is crucial for learning a recurrent state that summarizes the history of observations and predicts future states, which is vital for long-horizon planning
Lack of Temporal Dynamics: DINOv2, while excellent for static visual representation, does not inherently capture temporal dynamics. The RSSM is crucial for learning a recurrent state that summarizes the history of observations and predicts future states, which is vital for long-horizon planning
-
[16]
The RSSM, especially with the contrastive and IDM objectives, is specifically designed to create a latent space that is optimized for downstream planning
Unstructured Latent Space:While DINOv2 provides semantically rich visual features, its latent space is not explicitly structured for planning in terms of task progress or action relevance. The RSSM, especially with the contrastive and IDM objectives, is specifically designed to create a latent space that is optimized for downstream planning
-
[17]
The RSSM acts as a bottleneck and a learning mechanism to extract the most pertinent information for control
Dimensionality and Noise:Raw DINOv2 features might be higher dimensional or contain more irrelevant noise for planning compared to the compressed and refined latent states learned by the RSSM. The RSSM acts as a bottleneck and a learning mechanism to extract the most pertinent information for control. In conclusion, while DINOv2 serves as an excellent vis...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.