Modular Lie Algebraic PDE Control of Multibody Flexible Manipulators
Pith reviewed 2026-05-13 06:12 UTC · model grok-4.3
The pith
A modular Lie-algebraic controller for flexible manipulators preserves the full elastic PDE and guarantees exponential twist convergence for chains of arbitrary length by exact cancellation of interaction terms.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Substituting the strain-based deformation PDE into the dynamic equation eliminates distributed elastic acceleration and produces a per-link model governed solely by body-fixed twist acceleration and the deformation field. A nominal controller on this model yields exponential decay of twist errors via a per-subsystem Lyapunov function, and an adaptive version with online parameter estimates does the same. Summing the Lyapunov functions over all links causes the inter-link interaction terms to cancel exactly, establishing the result for arbitrary chain lengths under both controllers.
What carries the argument
The se(3)-based representation of twists and wrenches that makes interaction power terms frame-invariant and cancellable by Newton's third law upon summation over subsystems.
If this is right
- Exponential convergence of twist errors holds for any number of links without re-deriving the proof.
- Elastic deformations remain bounded under both nominal and adaptive control.
- The stability certificate is modular because cancellation relies only on local frame invariance.
- Parameter adaptation via projection law preserves the same convergence properties.
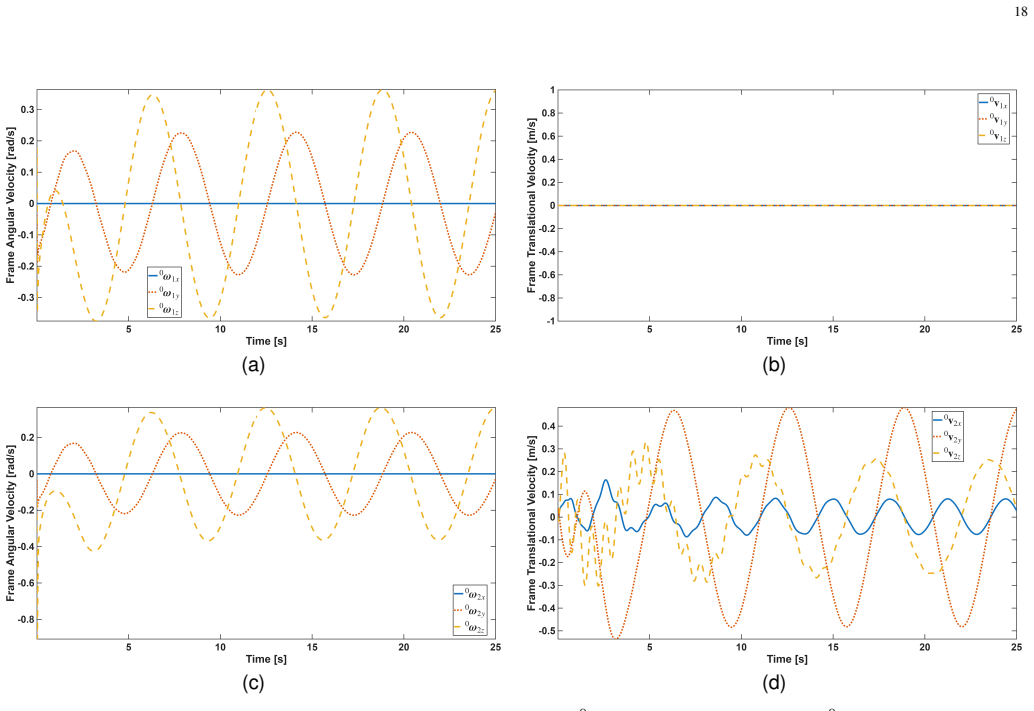
- Validation confirms performance on a two-link manipulator in 3D motion.
Where Pith is reading between the lines
- The same telescoping cancellation could apply to other multi-body systems with distributed flexibility if they admit a similar Lie-group structure.
- Designers might add or remove links without re-proving global stability, enabling rapid reconfiguration.
- Extension to real-time implementation would require efficient solution of the per-link PDE within the controller loop.
Load-bearing premise
Substituting the strain-based deformation PDE directly into the dynamic equation yields a controllable model governed only by twist acceleration and deformation without introducing unaccounted distributed effects.
What would settle it
Simulation or hardware experiment on a three-link flexible manipulator where twist errors fail to converge exponentially or elastic deformation becomes unbounded despite applying the proposed controller.
Figures










read the original abstract
This paper presents a subsystem-based adaptive control framework for serial flexible manipulators with an arbitrary number of links, in which the elastic deformation PDE of each link is carried through the entire control design without spatial discretization or modal truncation. All dynamic quantities -- rigid-body motion, elastic deformation, and inter-link constraint forces -- are expressed uniformly as body-fixed twists and wrenches within the se3 Lie-algebraic structure. A controllable form of the per-link dynamics is derived by substituting the strain-based deformation PDE into the dynamic equation, eliminating distributed elastic acceleration and yielding a model governed by the body-fixed twist acceleration and deformation field. Desired subsystem twist trajectories are generated via a deflection-compensating inverse kinematics procedure. A nominal per-link controller is proven to produce exponential twist error decay via a per-subsystem Lyapunov function. An adaptive modification replaces exact physical parameters with online estimates governed by a projection-based law, augmenting with a parameter estimation error term. Upon summing over all links, the interaction power terms telescope to zero by Newton's third law and the frame invariance of the natural power pairing on se3*se*(3), establishing exponential convergence of all twist errors and bounded elastic deformation under both nominal and adaptive controllers. The screw-theoretic structure renders interaction term cancellation exact, making the stability certificate modular and scalable to chains of arbitrary length. The framework is validated numerically on a two-link flexible manipulator in three-dimensional motion.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a modular adaptive control framework for serial flexible manipulators of arbitrary length. All quantities (rigid motion, elastic deformation, constraints) are expressed in body-fixed se(3) twists and wrenches. Substituting the strain-based deformation PDE into the per-link dynamics is claimed to yield a controllable model free of distributed elastic accelerations. Nominal and projection-based adaptive controllers are designed; per-subsystem Lyapunov functions establish exponential twist-error decay, while summation over links produces exact telescoping of interaction power terms by Newton's third law and invariance of the se(3) power pairing, yielding global exponential convergence of twist errors and bounded elastic deformation. Numerical validation is shown for a two-link 3-D manipulator.
Significance. If the substitution step and ensuing Lyapunov analysis hold, the result would be a meaningful advance: a fully PDE-based, discretization-free controller for multibody flexible systems whose stability certificate remains modular and scalable to arbitrary chain length through exact Lie-algebraic cancellation. The uniform screw-theoretic treatment of rigid and elastic dynamics is a clear technical strength.
major comments (1)
- [Derivation of controllable per-link dynamics] The central substitution step (abstract and the derivation of the controllable per-link model) asserts that inserting the strain PDE into the se(3) dynamics eliminates all distributed elastic acceleration terms, including those generated by the coadjoint action of the twist and the time derivative of the strain field under the adjoint map. No explicit term-by-term expansion is supplied to confirm that residual distributed operators do not remain. Because this cancellation is load-bearing for the sign-definiteness of each per-subsystem Lyapunov derivative and for the subsequent exponential-convergence claim, the absence of the expansion prevents verification of the nominal and adaptive stability arguments.
minor comments (2)
- The description of the natural power pairing on se(3)* × se(3) used for the telescoping argument should be stated explicitly (including its invariance properties) rather than assumed from prior literature.
- [Numerical validation] The numerical example would benefit from tabulated convergence rates, explicit bounds on elastic deformation, and a brief comparison against a spatially discretized baseline to illustrate the claimed advantage of the PDE approach.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive comments. The major concern regarding the central substitution step is valid, and we will revise the manuscript to include the requested explicit expansion while preserving the overall framework and claims.
read point-by-point responses
-
Referee: [Derivation of controllable per-link dynamics] The central substitution step (abstract and the derivation of the controllable per-link model) asserts that inserting the strain PDE into the se(3) dynamics eliminates all distributed elastic acceleration terms, including those generated by the coadjoint action of the twist and the time derivative of the strain field under the adjoint map. No explicit term-by-term expansion is supplied to confirm that residual distributed operators do not remain. Because this cancellation is load-bearing for the sign-definiteness of each per-subsystem Lyapunov derivative and for the subsequent exponential-convergence claim, the absence of the expansion prevents verification of the nominal and adaptive stability arguments.
Authors: We agree that the manuscript does not supply an explicit term-by-term expansion of the substitution, which limits independent verification of the cancellation. In the revised version we will add a dedicated derivation (in Section III or a new appendix) that begins from the body-fixed se(3) dynamic equation, substitutes the strain-based PDE expression for the elastic acceleration, and expands every term. The expansion will show that all distributed contributions arising from the coadjoint action of the twist and from the time derivative of the strain field under the adjoint map cancel identically, owing to the skew-symmetry of the Lie bracket and the invariance of the natural power pairing on se(3) × se*(3). The resulting per-link model is therefore free of distributed elastic accelerations and depends only on the body-fixed twist acceleration and the deformation field, restoring the sign-definiteness of each subsystem Lyapunov derivative and supporting the exponential-convergence argument. revision: yes
Circularity Check
No circularity; derivation grounded in external physical and Lie-algebraic identities
full rationale
The paper's central steps—substituting the strain PDE to obtain a controllable per-link model and summing interaction terms that telescope via Newton's third law plus se(3) power-pairing invariance—are presented as derivations from standard external properties rather than reductions to quantities defined or fitted inside the paper. No self-citations are invoked as load-bearing uniqueness theorems, no parameters are fitted to data and then relabeled as predictions, and the telescoping cancellation is not shown to be tautological with the subsystem Lyapunov functions. The framework remains self-contained against external benchmarks (Newton's laws, Lie-group kinematics) with no evident circular steps.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math Properties of the se(3) Lie algebra and its dual for expressing rigid-body twists and wrenches
- domain assumption Newton's third law and frame invariance of the natural power pairing on se(3)*se(3)
Reference graph
Works this paper leans on
-
[1]
Dynamics of continuum and soft robots: A strain parameterization based approach,
F. Boyer, V . Lebastard, F. Candelier, and F. Renda, “Dynamics of continuum and soft robots: A strain parameterization based approach,” IEEE Transactions on Robotics, vol. 37, 2021. [Online]. Available: https://doi.org/10.1109/TRO.2020
-
[2]
X. Yao, X. Li, Z. Liu, H. Gao, J. Li, and Y . Liu, “Asymptotical fault-tolerant time-varying tracking control of networked mobile flexible manipulators under prescribed performances and dos attacks,”IEEE Transactions on Automatic Control, vol. 71, pp. 20–35, 1 2026
work page 2026
-
[3]
S. Yaqubi, S. M. Tahamipour-Z, and J. Mattila, “Semi-analytical de- sign of pde endpoint controller for flexible manipulator with non- homogenous boundary conditions,”IEEE Transactions on Automation Science and Engineering, 2023
work page 2023
-
[4]
Dynamic modeling and vibration control for a nonlinear 3-dimensional flexible manipulator,
Z. Liu, J. Liu, and W. He, “Dynamic modeling and vibration control for a nonlinear 3-dimensional flexible manipulator,”International Journal of Robust and Nonlinear Control, vol. 28, pp. 3927–3945, 9 2018
work page 2018
-
[5]
Modeling and control of flexible telescoping manipulators,
A. Walsh and J. R. Forbes, “Modeling and control of flexible telescoping manipulators,”IEEE Transactions on Robotics, vol. 31, pp. 936–947, 8 2015. [Online]. Available: https://ieeexplore.ieee.org/ document/7128733/
-
[6]
S. S. Rao,Vibration of Continuous Systems (2007). John Wileys, 2007
work page 2007
-
[7]
Observer design for a flexible-link manipulator with pde model,
H. Yang, J. Liu, and X. Lan, “Observer design for a flexible-link manipulator with pde model,”Journal of Sound and Vibration, vol. 341, pp. 237–245, 4 2015. [Online]. Available: https://linkinghub.elsevier. com/retrieve/pii/S0022460X14010372
work page 2015
-
[8]
F. Cao and J. Liu, “An adaptive iterative learning algorithm for boundary control of a coupled ode–pde two-link rigid–flexible manipulator,” Journal of the Franklin Institute, vol. 354, pp. 277–297, 2017. [Online]. Available: http://dx.doi.org/10.1016/j.jfranklin.2016.10.013 14 (a) (b) (c) (d) (e) (f) Fig. 2: Body-fixed twist components under SLPC and joi...
-
[9]
Screw theoretic nonlinear pde dynamic model of a flexible link using body-fixed coordinates,
S. Yaqubi, A. Barjini, and J. Mattila, “Screw theoretic nonlinear pde dynamic model of a flexible link using body-fixed coordinates,”Applied Mathematical Modelling, p. 116960, 4 2026. [Online]. Available: https://linkinghub.elsevier.com/retrieve/pii/S0307904X26002210
work page 2026
-
[10]
Zhu,Virtual Decomposition Control
W.-H. Zhu,Virtual Decomposition Control. Springer Berlin Heidelberg, 2010, vol. 60. [Online]. Available: http://link.springer.com/10.1007/ 978-3-642-10724-5
work page 2010
-
[11]
Flexible single-link manipulators control based on a full-order transfer function model,
R. Mohsenipour and G. Liu, “Flexible single-link manipulators control based on a full-order transfer function model,”IEEE Transactions on Automatic Control, vol. 69, pp. 4086–4093, 6 2024
work page 2024
-
[12]
Featherstone,Rigid Body Dynamics Algorithms
R. Featherstone,Rigid Body Dynamics Algorithms. Springer US, 2008. [Online]. Available: http://link.springer.com/10.1007/ 978-1-4899-7560-7
work page 2008
-
[13]
A. M ¨uller, “Screw and lie group theory in multibody kinematics: Mo- tion representation and recursive kinematics of tree-topology systems,” Multibody System Dynamics, vol. 43, pp. 37–70, 5 2018
work page 2018
-
[14]
Subsystem-based control with modularity for strict- feedback form nonlinear systems,
J. Koivumaki, J.-P. Humaloja, L. Paunonen, W.-H. Zhu, and J. Mattila, “Subsystem-based control with modularity for strict- feedback form nonlinear systems,”IEEE Transactions on Automatic Control, vol. 68, pp. 1–8, 7 2022. [Online]. Available: https: //ieeexplore.ieee.org/document/9891804/
-
[15]
H. Gao, Z. Yu, J. Hu, and C. Sun, “Adaptive composite learning control of a flexible two-link manipulator with unknown spatiotemporally vary- ing disturbance,”International Journal of Robust and Nonlinear Control, 8 2024
work page 2024
-
[16]
Kinematics and dynamics of flexible robotic manipulators using dual screws,
A. Cibicik and O. Egeland, “Kinematics and dynamics of flexible robotic manipulators using dual screws,”IEEE Transactions on Robotics, vol. 37, pp. 206–224, 2 2021
work page 2021
-
[17]
Advances in flexible robotic manipulator systems—part i: Overview and dynamics modeling methods,
B. Li, X. Li, H. Gao, and F.-Y . Wang, “Advances in flexible robotic manipulator systems—part i: Overview and dynamics modeling methods,”IEEE/ASME Transactions on Mechatronics, vol. 29, pp. 1100–1110, 4 2024. [Online]. Available: https://ieeexplore.ieee.org/ document/10438059/
-
[18]
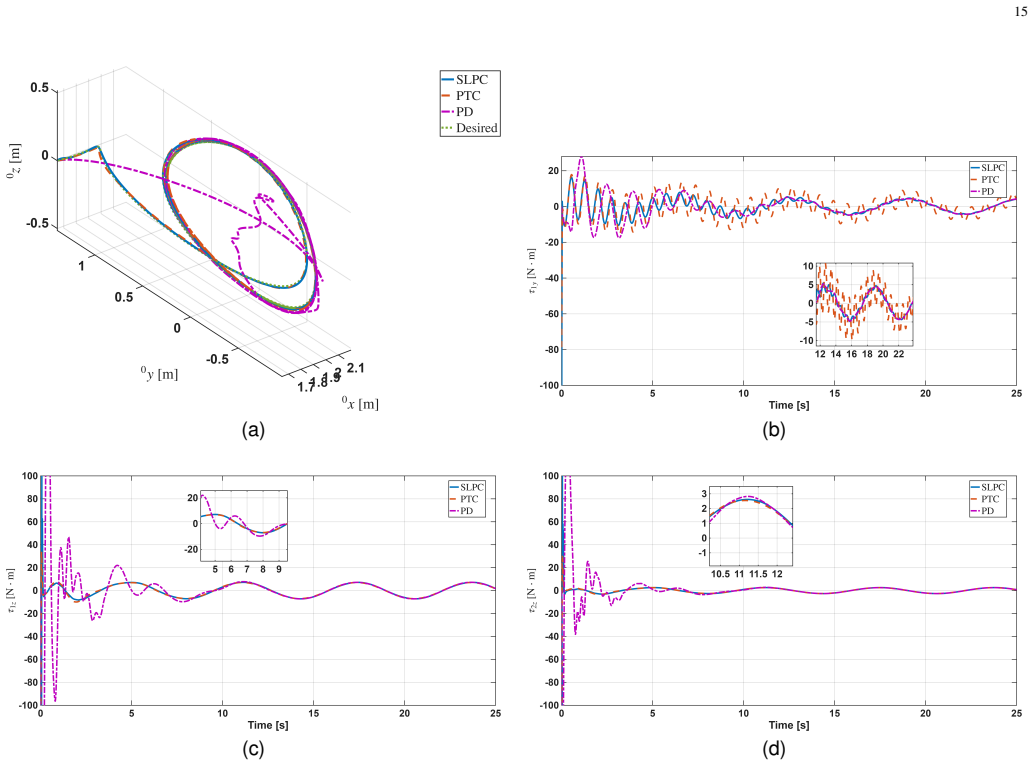
H. Gao, Z. Yu, and J. Hu, “A survey on modeling and control 15 (a) (b) (c) (d) Fig. 3: Endpoint trajectory and control inputs comparing SLPC, PTC, and PD with±100[Nm] saturation: (a) three-dimensional endpoint trajectory, (b)τ 1y, (c)τ 1z, (d)τ 2z. (a) (b) Fig. 4: Parameter adaptation analysis: (a) normalized parameter estimation errors for all ten adapte...
-
[19]
B. Zhang, T. Tao, and X. Mei, “A dynamic identification method for general serial manipulators from an analytical perspective based on lie theory,”Nonlinear Dynamics, vol. 112, pp. 19 939–19 958, 11 2024
work page 2024
-
[20]
Screw- based dynamics of a serial/parallel flexible manipulator for demo blanket remote handling,
S. Grazioso, G. D. Gironimo, D. Iglesias, and B. Siciliano, “Screw- based dynamics of a serial/parallel flexible manipulator for demo blanket remote handling,”Fusion Engineering and Design, vol. 139, pp. 39–46, 2 2019
work page 2019
-
[21]
M. Herrmann and P. Kotyczka, “Relative-kinematic formulation of geometrically exact beam dynamics based on lie group variational integrators,”Computer Methods in Applied Mechanics and Engineering, vol. 432, 12 2024. 16 (a) (b) (c) (d) (e) (f) Fig. 5: Distributed deformation field of both links: (a) irξx1 (axial, order10 −4 [m]), (b) irξy1 (bending), (c) i...
work page 2024
-
[22]
Scalable Screw-Theoretic Synthesis for PDE-Based Dynamic Modeling of Multibody Flexible Manipulators
S. Yaqubi, A. Kitzinger, A. M ¨uller, H. Gattinger, and J. Mattila, “Scalable screw-theoretic synthesis for pde-based dynamic modeling of multibody flexible manipulators,” 4 2026. [Online]. Available: http://arxiv.org/abs/2601.16242
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[23]
A. A. Shabana,Dynamics of Multibody Systems, 4th ed. Cambridge: Cambridge University Press, 2013
work page 2013
-
[24]
Development of nonlinear elastic leaf spring model for multibody vehicle systems,
H. Sugiyama, A. A. Shabana, M. A. Omar, and W. Y . Loh, “Development of nonlinear elastic leaf spring model for multibody vehicle systems,” Computer Methods in Applied Mechanics and Engineering, vol. 195, pp. 6925–6941, 10 2006
work page 2006
-
[25]
Procedia CIRP72(March), 159–164 (2018) https://doi.org/10.1016/j
M. Sharifnia and A. Akbarzadeh, “A constrained assumed modes method for solution of a new dynamic equation for an axially moving beam,”Computers and Mathematics with Applications, vol. 72, pp. 2167–2180, 2016. [Online]. Available: http://dx.doi.org/10.1016/j. camwa.2016.08.018
work page doi:10.1016/j 2016
-
[26]
Geometrically exact models for soft robotic manipulators,
D. Trivedi, A. Lotfi, and C. D. Rahn, “Geometrically exact models for soft robotic manipulators,”IEEE Transactions on Robotics, vol. 24, pp. 773–780, 8 2008
work page 2008
-
[27]
Discrete variational lie group formulation of geometrically exact beam dynamics,
F. Demoures, F. Gay-Balmaz, S. Leyendecker, S. Ober-Bl ¨obaum, T. S. Ratiu, and Y . Weinand, “Discrete variational lie group formulation of geometrically exact beam dynamics,”Numerische Mathematik, vol. 130, pp. 73–123, 5 2015
work page 2015
-
[28]
J. Chen, Z. Huang, and Q. Tian, “A multisymplectic lie algebra varia- tional integrator for flexible multibody dynamics on the special euclidean group se (3),”Mechanism and Machine Theory, vol. 174, 8 2022
work page 2022
-
[29]
R. M. Murray, Z. Li, and S. S. Sastry,A Mathematical Introduction to Robotic Manipulation. Boca Raton, FL: CRC Press, 1994
work page 1994
-
[30]
H. K. Khalil,Nonlinear systems. Prentice Hall, 2002
work page 2002
-
[31]
R. A. Adams and J. J. F. Fournier,Sobolev Spaces, 2nd ed., ser. Pure and Applied Mathematics. Amsterdam: Academic Press, 2003, vol. 140
work page 2003
-
[32]
Ljung,System Identification: Theory for the User, 2nd ed
L. Ljung,System Identification: Theory for the User, 2nd ed. Upper Saddle River, NJ: Prentice Hall, 1999
work page 1999
-
[33]
Composite adaptive control of robot manipulators,
J.-J. E. Slotine and W. Li, “Composite adaptive control of robot manipulators,”Automatica, vol. 25, no. 4, pp. 509–519, 1989
work page 1989
-
[34]
P. A. Ioannou and J. Sun,Robust Adaptive Control. Prentice Hall, 1996. [Online]. Available: https://www.taylorfrancis.com/books/ 9781420073652/chapters/10.1201/b10384-41
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.