Traffic Scenario Orchestration from Language via Constraint Satisfaction
Pith reviewed 2026-05-11 00:49 UTC · model grok-4.3
The pith
Natural language descriptions of traffic tests can be turned directly into constraint sets that off-the-shelf solvers use to generate closed-loop actor behaviors for autonomous vehicle evaluation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The authors cast scenario orchestration as a constraint-solving problem. Foundation models convert general natural language descriptions into a set of constraints that serve as the scenario representation. Off-the-shelf solvers then find closed-loop trajectories for all actors that satisfy those constraints, meeting the precise testing intentions stated in the original language.
What carries the argument
The translation of natural language scenario descriptions into a constraint-based scenario representation that is solved by off-the-shelf solvers to produce closed-loop actor behaviors.
If this is right
- Test engineers can specify interactive scenarios in plain English rather than writing custom code for each case.
- Closed-loop solutions ensure other actors respond to the autonomous vehicle's actions, which is required for realistic ego-reactive testing.
- The approach achieves higher orchestration success rates than prior baselines across diverse scenario descriptions.
- Precise controllability becomes available for out-of-distribution cases that statistical models struggle to produce.
Where Pith is reading between the lines
- The same language-to-constraint pipeline could be applied to generate test scenarios in other embodied simulation domains such as robotics or logistics.
- If the constraint sets remain solvable at larger scale, the method could support automatic generation of thousands of targeted tests from a single high-level description.
- Additional physical realism checks would be needed to filter mathematically valid but implausible solutions returned by the solver.
Load-bearing premise
Foundation models can reliably translate arbitrary natural language descriptions into accurate, complete, and solvable constraint sets without hallucinations, omissions, or inconsistencies.
What would settle it
A clear natural language description that produces a constraint set the solver either cannot satisfy or satisfies only with actor behaviors that contradict the original intent.
Figures







read the original abstract
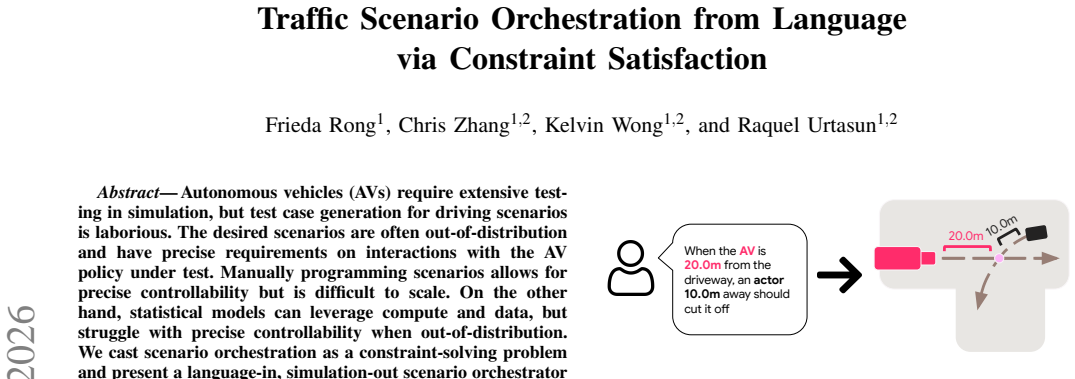
Autonomous vehicles (AVs) require extensive testing in simulation, but test case generation for driving scenarios is laborious. The desired scenarios are often out-of-distribution and have precise requirements on interactions with the AV policy under test. Manually programming scenarios allows for precise controllability but is difficult to scale. On the other hand, statistical models can leverage compute and data, but struggle with precise controllability when out-of-distribution. We cast scenario orchestration as a constraint-solving problem and present a language-in, simulation-out scenario orchestrator for closed-loop testing AVs. Our approach leverages foundation model reasoning to translate general, natural language descriptions into a set of constraints as a scenario representation. This then allows us to leverage off the shelf solvers to solve for actor behaviors which meet precise testing intentions in closed-loop. Under a benchmark of carefully crafted and diverse scenario descriptions, our approach greatly outperforms our baselines in orchestration success rate. We further show that our closed-loop approach is especially important for scenarios which require ego-reactive specifications.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a language-to-simulation pipeline for AV scenario orchestration: foundation models translate natural-language descriptions into constraint sets, which off-the-shelf solvers then use to generate closed-loop actor trajectories. The central claim is that this hybrid approach achieves substantially higher orchestration success rates than baselines on a benchmark of diverse, carefully crafted scenarios, with particular advantages for ego-reactive specifications.
Significance. If the generated constraints reliably and completely encode the original natural-language intent (without hallucinations, omissions, or inconsistencies that allow solver success on a divergent specification), the method would offer a scalable route to precise, out-of-distribution scenario generation that combines the controllability of manual programming with the flexibility of foundation models. The closed-loop emphasis and use of existing solvers are practical strengths.
major comments (2)
- [Abstract] Abstract and evaluation description: the reported 'orchestration success rate' is defined solely as the solver finding a feasible closed-loop solution. No post-generation validation is described that checks whether the solved trajectories satisfy the original natural-language description rather than a possibly hallucinated or incomplete constraint set. This directly undermines the claim that the method meets 'precise testing intentions.'
- [Abstract] Abstract: the outperformance claim is stated without any reported details on benchmark construction, baseline implementations, exact success metrics, or statistical significance testing. These omissions make it impossible to assess whether the central empirical result is robust.
minor comments (2)
- Clarify the precise interface between the foundation-model output and the solver input (e.g., how constraints are represented and whether they are checked for consistency before solving).
- The abstract mentions 'ego-reactive specifications' as a special case; a short example in the main text would help readers understand what distinguishes these from non-reactive cases.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment point by point below. Where the comments identify areas for improvement in clarity or completeness, we have revised the manuscript accordingly.
read point-by-point responses
-
Referee: [Abstract] Abstract and evaluation description: the reported 'orchestration success rate' is defined solely as the solver finding a feasible closed-loop solution. No post-generation validation is described that checks whether the solved trajectories satisfy the original natural-language description rather than a possibly hallucinated or incomplete constraint set. This directly undermines the claim that the method meets 'precise testing intentions.'
Authors: We appreciate this observation. The orchestration success rate in the manuscript is defined as the solver returning a feasible closed-loop trajectory under the generated constraints, as this directly evaluates the end-to-end pipeline's ability to produce usable scenarios for AV testing. However, we acknowledge that this metric alone does not explicitly verify fidelity between the solved trajectories and the original natural-language intent. In the revised manuscript, we have added a post-generation validation procedure: an independent LLM-based checker verifies that key interaction elements from the original description are satisfied by the trajectories, supplemented by a human review on a random subset of scenarios. We have updated the abstract and evaluation sections to describe this validation and its results, thereby strengthening support for the claim of meeting precise testing intentions. revision: yes
-
Referee: [Abstract] Abstract: the outperformance claim is stated without any reported details on benchmark construction, baseline implementations, exact success metrics, or statistical significance testing. These omissions make it impossible to assess whether the central empirical result is robust.
Authors: We agree that the abstract's brevity omits these details. The full manuscript provides them in dedicated sections: benchmark construction (including scenario diversity and out-of-distribution focus) is described in Section 4; baseline implementations (with implementation specifics) appear in Section 5; exact success metrics (solver feasibility within time bounds) are defined in Section 3.2; and statistical significance (via paired t-tests with reported p-values) is included in the results tables. To address the concern, we have partially revised the abstract to briefly reference the benchmark's careful construction and the use of statistical testing, while retaining the original length constraints. This makes the empirical claims more transparent without changing the reported outcomes. revision: partial
Circularity Check
No circularity: external foundation models and solvers form an open derivation chain
full rationale
The paper's core pipeline translates natural-language scenario descriptions via an external foundation model into a constraint set, then invokes an off-the-shelf solver to produce closed-loop actor trajectories. No equation, definition, or success metric is shown to be constructed from the target result itself; the reported orchestration success rate is an external evaluation of solver feasibility on the generated constraints rather than a quantity fitted or renamed from the input descriptions. No self-citation chains, uniqueness theorems, or ansatzes imported from prior author work appear in the provided text as load-bearing steps. The derivation therefore remains self-contained against external components and does not reduce to its own inputs by construction.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Foundation models can translate general natural language descriptions into accurate and complete constraint sets suitable for solvers
- domain assumption Off-the-shelf constraint solvers can find actor behaviors satisfying the generated constraints in closed-loop with an AV policy
Reference graph
Works this paper leans on
-
[1]
ASAM e.V ., “ASAM OpenSCENARIO v2.0.0,” 2022, retrieved from https://www.asam.net/standards/detail/openscenario/v200/
work page 2022
-
[2]
Language conditioned traffic generation,
S. Tan, B. Ivanovic, X. Weng, M. Pavone, and P. Kraehenbuehl, “Language conditioned traffic generation,” in7th Annual Conference on Robot Learning, 2023. [Online]. Available: https://openreview.net/ forum?id=PK2debCKaG
work page 2023
-
[3]
Promptable closed-loop traffic simulation,
S. Tan, B. Ivanovic, Y . Chen, B. Li, X. Weng, Y . Cao, P. Kr ¨ahenb¨uhl, and M. Pavone, “Promptable closed-loop traffic simulation,” in8th Annual Conference on Robot Learning, 2024
work page 2024
-
[4]
Geoscenario: An open dsl for autonomous driving scenario representation,
R. Queiroz, T. Berger, and K. Czarnecki, “Geoscenario: An open dsl for autonomous driving scenario representation,” in2019 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2019, pp. 287–294
work page 2019
-
[5]
Scenic: a language for scenario specification and scene generation,
D. J. Fremont, T. Dreossi, S. Ghosh, X. Yue, A. L. Sangiovanni- Vincentelli, and S. A. Seshia, “Scenic: a language for scenario specification and scene generation,” inProceedings of the 40th ACM SIGPLAN conference on programming language design and imple- mentation, 2019, pp. 63–78
work page 2019
-
[6]
Metascenario: A framework for driving scenario data description, storage and indexing,
C. Chang, D. Cao, L. Chen, K. Su, K. Su, Y . Su, F.-Y . Wang, J. Wang, P. Wang, J. Wei,et al., “Metascenario: A framework for driving scenario data description, storage and indexing,”IEEE Transactions on Intelligent Vehicles, vol. 8, no. 2, pp. 1156–1175, 2022
work page 2022
-
[7]
Synthesizing traffic scenarios from formal specifications for testing automated vehicles,
M. Klischat and M. Althoff, “Synthesizing traffic scenarios from formal specifications for testing automated vehicles,” in2020 IEEE intelligent vehicles symposium (IV). IEEE, 2020, pp. 2065–2072
work page 2020
-
[8]
Crisgen: Constraint-based generation of critical scenarios for autonomous vehicles,
A. Nonnengart, M. Klusch, and C. M ¨uller, “Crisgen: Constraint-based generation of critical scenarios for autonomous vehicles,” inFormal Methods. FM 2019 International Workshops: Porto, Portugal, October 7–11, 2019, Revised Selected Papers, Part I 3. Springer, 2020, pp. 233–248
work page 2019
-
[9]
Solving constraint systems from traffic scenarios for the validation of autonomous driving
K. Scheibler, A. Eggers, T. Teige, M. Walz, T. Bienm ¨uller, and U. Brockmeyer, “Solving constraint systems from traffic scenarios for the validation of autonomous driving.” inSC-square@ SIAM AG, 2019
work page 2019
-
[10]
Sovar: Build generalizable scenarios from accident reports for autonomous driving testing,
A. Guo, Y . Zhou, H. Tian, C. Fang, Y . Sun, W. Sun, X. Gao, A. T. Luu, Y . Liu, and Z. Chen, “Sovar: Build generalizable scenarios from accident reports for autonomous driving testing,” inProceedings of the 39th IEEE/ACM International Conference on Automated Software Engineering, 2024, pp. 268–280
work page 2024
-
[11]
Foundation models in autonomous driving: A survey on scenario generation and scenario analysis,
Y . Gao, M. Piccinini, Y . Zhang, D. Wang, K. Moller, R. Brusnicki, B. Zarrouki, A. Gambi, J. F. Totz, K. Storms,et al., “Foundation models in autonomous driving: A survey on scenario generation and scenario analysis,”arXiv preprint arXiv:2506.11526, 2025
-
[12]
Text2scenario: Text-driven scenario generation for autonomous driving test,
X. Cai, X. Bai, Z. Cui, D. Xie, D. Fu, H. Yu, and Y . Ren, “Text2scenario: Text-driven scenario generation for autonomous driv- ing test,”arXiv preprint arXiv:2503.02911, 2025
-
[13]
Laser: Script execution by autonomous agents for on-demand traffic simulation,
H. Gao, J. Wang, W. Fang, J. Xu, Y . Huang, T. Chen, and X. Ma, “Laser: Script execution by autonomous agents for on-demand traffic simulation,” inProceedings of the 16th International Conference on Internetware, 2025, pp. 84–95
work page 2025
-
[14]
S. Tang, Z. Zhang, J. Zhou, L. Lei, Y . Zhou, and Y . Xue, “Legend: A top-down approach to scenario generation of autonomous driving systems assisted by large language models,” inProceedings of the 39th IEEE/ACM International Conference on Automated Software Engineering, 2024, pp. 1497–1508
work page 2024
-
[15]
Generating probabilistic scenario programs from natural language,
K. Elmaaroufi, D. Shanker, A. Cismaru, M. Vazquez-Chanlatte, A. L. Sangiovanni-Vincentelli, M. Zaharia, and S. A. Seshia, “Generating probabilistic scenario programs from natural language,”CoRR, 2024
work page 2024
-
[16]
Text-to-drive: Diverse driving behavior synthesis via large language models,
P. Nguyen, T.-H. Wang, Z.-W. Hong, S. Karaman, and D. Rus, “Text-to-drive: Diverse driving behavior synthesis via large language models,” 2024
work page 2024
-
[17]
A. Witkin and M. Kass, “Spacetime constraints,”ACM Siggraph Computer Graphics, vol. 22, no. 4, pp. 159–168, 1988
work page 1988
-
[18]
T. Ellman, R. Deak, and J. Fotinatos, “Automated synthesis of numer- ical programs for simulation of rigid mechanical systems in physics- based animation,”Automated Software Engineering, vol. 10, pp. 367– 398, 2003
work page 2003
-
[19]
OpenAI, “Gpt-5,” https://platform.openai.com, 2025, openAI API
work page 2025
-
[20]
L. De Moura and N. Bjørner, “Z3: An efficient smt solver,” in International conference on Tools and Algorithms for the Construction and Analysis of Systems. Springer, 2008, pp. 337–340. VI. SCENARIOTAXONOMY Ego State Ego Intent Hero State Hero Intent Interaction Trigger Driveway Right turn Driveway Right turn Hero brakes Distance Driveway Right turn Westb...
work page 2008
-
[21]
It wants to turn right onto the road travelling westbound
Ego is on the driveway exit and it is initial ego distance behind stop line m behind the stop line. It wants to turn right onto the road travelling westbound. There is a hero vehicle on the driveway exit and it is ini- tial hero distance behind stop line m behind the stop line. It wants to turn right onto the road travelling westbound. When the ego is ego...
-
[22]
It wants to turn right onto the road travelling westbound
Ego is on the driveway exit and it is initial ego distance behind stop line m behind the stop line. It wants to turn right onto the road travelling westbound. There is a hero vehicle on the road. It wants to lane follow along the road travelling westbound. When the ego is ego distance behind stop line m behind the stop line and the hero vehicle is hero di...
-
[23]
It wants to turn right onto the road travelling westbound
Ego is on the driveway exit and it is initial ego distance behind stop line m behind the stop line. It wants to turn right onto the road travelling westbound. There is a hero vehicle on the road. It wants to lane follow along the road travelling westbound. When the ego is ego distance behind stop line m behind the stop line and the hero vehicle is distanc...
-
[24]
It wants to turn right onto the road travelling westbound
Ego is on the driveway exit and it is initial ego distance behind stop line m behind the stop line. It wants to turn right onto the road travelling westbound. There is a hero vehicle on the road. It wants to lane follow along the road travelling westbound. When the ego is ego distance behind stop line m behind the stop line and the hero vehicle is distanc...
-
[25]
It wants to turn left onto the road travelling eastbound
Ego is on the driveway exit and it is initial ego distance behind stop line m behind the stop line. It wants to turn left onto the road travelling eastbound. There is a hero vehicle on the driveway exit and it is ini- tial hero distance behind stop line m behind the stop line. It wants to turn left onto the road travelling eastbound. When the ego is ego d...
-
[26]
It wants to turn left onto the road travelling eastbound
Ego is on the driveway exit and it is initial ego distance behind stop line m behind the stop line. It wants to turn left onto the road travelling eastbound. There is a hero vehicle on the road. It wants to lane follow along the road travelling westbound. When the ego is ego distance behind stop line m behind the stop line and the hero vehicle is hero dis...
-
[27]
It wants to turn left onto the road travelling eastbound
Ego is on the driveway exit and it is initial ego distance behind stop line m behind the stop line. It wants to turn left onto the road travelling eastbound. There is a hero vehicle on the road. It wants to lane follow along the road travelling westbound. When the ego is ego distance behind stop line m behind the stop line and the hero vehicle is distance...
-
[28]
It wants to turn left onto the road travelling eastbound
Ego is on the driveway exit and it is initial ego distance behind stop line m behind the stop line. It wants to turn left onto the road travelling eastbound. There is a hero vehicle on the road. It wants to lane follow along the road travelling westbound. When the ego is ego distance behind stop line m behind the stop line and the hero vehicle is distance...
-
[29]
It wants to turn left onto the road travelling eastbound
Ego is on the driveway exit and it is initial ego distance behind stop line m behind the stop line. It wants to turn left onto the road travelling eastbound. There is a hero vehicle on the road. It wants to lane follow along the road travelling eastbound. When the ego is ego distance behind stop line m behind the stop line and the hero vehicle is hero dis...
-
[30]
It wants to turn left onto the road travelling eastbound
Ego is on the driveway exit and it is initial ego distance behind stop line m behind the stop line. It wants to turn left onto the road travelling eastbound. There is a hero vehicle on the road. It wants to lane follow along the road travelling eastbound. When the ego is ego distance behind stop line m behind the stop line and the hero vehicle is distance...
-
[31]
It wants to turn left onto the road travelling eastbound
Ego is on the driveway exit and it is initial ego distance behind stop line m behind the stop line. It wants to turn left onto the road travelling eastbound. There is a hero vehicle on the road. It wants to lane follow along the road travelling eastbound. When the ego is ego distance behind stop line m behind the stop line and the hero vehicle is distance...
-
[32]
It wants to turn left onto the road travelling eastbound
Ego is on the driveway exit and it is initial ego distance behind stop line m behind the stop line. It wants to turn left onto the road travelling eastbound. There is a hero vehicle on the road. It wants to turn left into the driveway. When the ego is ego distance behind stop line m behind the stop line and the hero vehicle is hero distance behind conflic...
-
[33]
It wants to turn left onto the road travelling eastbound
Ego is on the driveway exit and it is initial ego distance behind stop line m behind the stop line. It wants to turn left onto the road travelling eastbound. There is a hero vehicle on the road. It wants to turn left into the driveway. When the ego is ego distance behind stop line m behind the stop line and the hero vehicle is distance behind conflict poi...
-
[34]
It wants to turn left onto the road travelling eastbound
Ego is on the driveway exit and it is initial ego distance behind stop line m behind the stop line. It wants to turn left onto the road travelling eastbound. There is a hero vehicle on the road. It wants to turn left into the driveway. When the ego is ego distance behind stop line m behind the stop line and the hero vehicle is distance behind conflict poi...
-
[35]
It wants to lane follow along the road travelling westbound
Ego is on the road and it is initial ego distance behind intersection m behind the intersection. It wants to lane follow along the road travelling westbound. There is a hero vehicle on the road. It wants to lane follow along the road travelling westbound. When the ego is ego distance behind hero m behind the hero vehicle, the hero vehicle begins to decele...
-
[36]
It wants to lane follow along the road travelling westbound
Ego is on the road and it is initial ego distance behind intersection m behind the intersection. It wants to lane follow along the road travelling westbound. There is a hero vehicle on the road. It wants to turn left into the driveway. When the ego is ego distance behind conflict point m behind the the conflict point and the hero vehicle is hero distance ...
-
[37]
It wants to lane follow along the road travelling westbound
Ego is on the road and it is initial ego distance behind intersection m behind the intersection. It wants to lane follow along the road travelling westbound. There is a hero vehicle on the road. It wants to turn left into the driveway. When the ego is ego distance behind conflict point m behind the conflict point and the hero vehicle is hero distance behi...
-
[38]
It wants to lane follow along the road travelling westbound
Ego is on the road and it is initial ego distance behind intersection m behind the intersection. It wants to lane follow along the road travelling westbound. There is a hero vehicle on the road. It wants to turn left into the driveway. When the ego is ego distance behind conflict point m behind the conflict point and the hero vehicle is hero distance behi...
-
[39]
It wants to lane follow along the road travelling westbound
Ego is on the road and it is initial ego distance behind intersection m behind the intersection. It wants to lane follow along the road travelling westbound. There is a hero vehicle on the driveway. It wants to turn right onto the road travelling westbound. When the ego is ego distance behind conflict point m behind the conflict point and the hero vehicle...
-
[40]
It wants to lane follow along the road travelling westbound
Ego is on the road and it is initial ego distance behind intersection m behind the intersection. It wants to lane follow along the road travelling westbound. There is a hero vehicle on the driveway. It wants to turn right onto the road travelling westbound. When the ego is ego distance behind conflict point m behind the conflict point and the hero vehicle...
-
[41]
It wants to lane follow along the road travelling westbound
Ego is on the road and it is initial ego distance behind intersection m behind the intersection. It wants to lane follow along the road travelling westbound. There is a hero vehicle on the driveway. It wants to turn right onto the road travelling westbound. When the ego is ego distance behind conflict point m behind the conflict point and the hero vehicle...
-
[42]
It wants to lane follow along the road travelling westbound
Ego is on the road and it is initial ego distance behind intersection m behind the intersection. It wants to lane follow along the road travelling westbound. There is a hero vehicle on the driveway. It wants to turn left onto the road travelling eastbound. When the ego is ego distance behind conflict point m behind the conflict point and the hero vehicle ...
-
[43]
It wants to lane follow along the road travelling westbound
Ego is on the road and it is initial ego distance behind intersection m behind the intersection. It wants to lane follow along the road travelling westbound. There is a hero vehicle on the driveway. It wants to turn left onto the road travelling eastbound. When the ego is ego distance behind conflict point m behind the conflict point and the hero vehicle ...
-
[44]
It wants to lane follow along the road travelling westbound
Ego is on the road and it is initial ego distance behind intersection m behind the intersection. It wants to lane follow along the road travelling westbound. There is a hero vehicle on the driveway. It wants to turn left onto the road travelling eastbound. When the ego is ego distance behind conflict point m behind the conflict point and the hero vehicle ...
-
[45]
It wants to turn right into the driveway
Ego is on the road and it is initial ego distance behind intersection m behind the intersection. It wants to turn right into the driveway. There is a hero vehicle on the road. It wants to turn left into the drive- way. When the ego is ego distance behind conflict point m behind the conflict point and the hero vehicle is hero distance behind conflict point...
-
[46]
It wants to lane follow along the road travelling westbound
Ego is on the road and it is initial ego distance behind intersection m behind the intersection. It wants to lane follow along the road travelling westbound. There is a hero vehicle on the road. It wants to turn left into the driveway. When the ego is ego distance behind conflict point m behind the conflict point and the hero vehicle is hero distance behi...
-
[47]
It wants to lane follow along the road travelling westbound
Ego is on the road and it is initial ego distance behind intersection m behind the intersection. It wants to lane follow along the road travelling westbound. There is a hero vehicle on the road. It wants to turn left into the driveway. When the ego is ego distance behind conflict point m behind the conflict point and the hero vehicle is distance behind co...
-
[48]
It wants to lane follow along the road travelling eastbound
Ego is on the road and it is initial ego distance behind intersection m behind the intersection. It wants to lane follow along the road travelling eastbound. There is a hero vehicle on the road. It wants to lane follow along the road travelling eastbound. When the ego is ego distance behind hero m behind the hero vehicle, the hero vehicle begins to decele...
-
[49]
It wants to lane follow along the road travelling eastbound
Ego is on the road and it is initial ego distance behind intersection m behind the intersection. It wants to lane follow along the road travelling eastbound. There is a hero vehicle on the driveway. It wants to turn left onto the road travelling eastbound. When the ego is ego distance behind conflict point m behind the conflict point and the hero vehicle ...
-
[50]
It wants to lane follow along the road travelling eastbound
Ego is on the road and it is initial ego distance behind intersection m behind the intersection. It wants to lane follow along the road travelling eastbound. There is a hero vehicle on the driveway. It wants to turn left onto the road travelling eastbound. When the ego is ego distance behind conflict point m behind the conflict point and the hero vehicle ...
-
[51]
It wants to lane follow along the road travelling eastbound
Ego is on the road and it is initial ego distance behind intersection m behind the intersection. It wants to lane follow along the road travelling eastbound. There is a hero vehicle on the driveway. It wants to turn left onto the road travelling eastbound. When the ego is ego distance behind conflict point m behind the conflict point and the hero vehicle ...
-
[52]
It wants to turn left into the driveway
Ego is on the road and it is initial ego distance behind intersection m behind the intersection. It wants to turn left into the driveway. There is a hero vehicle on the road. It wants to lane follow along the road travelling westbound. When the ego is ego distance behind conflict point m behind the conflict point and the hero vehicle is hero distance behi...
-
[53]
It wants to turn left into the driveway
Ego is on the road and it is initial ego distance behind intersection m behind the intersection. It wants to turn left into the driveway. There is a hero vehicle on the road. It wants to lane follow along the road travelling westbound. When the ego is ego distance behind conflict point m behind the conflict point and the hero vehicle is distance behind co...
-
[54]
It wants to turn left into the driveway
Ego is on the road and it is initial ego distance behind intersection m behind the intersection. It wants to turn left into the driveway. There is a hero vehicle on the road. It wants to lane follow along the road travelling westbound. When the ego is ego distance behind conflict point m behind the conflict point and the hero vehicle is distance behind co...
-
[55]
It wants to turn left into the driveway
Ego is on the road and it is initial ego distance behind intersection m behind the intersection. It wants to turn left into the driveway. There is a hero vehicle on the road. It wants to turn right into the drive- way. When the ego is ego distance behind conflict point m behind the conflict point and the hero vehicle is hero distance behind conflict point...
-
[56]
It wants to turn left into the driveway
Ego is on the road and it is initial ego distance behind intersection m behind the intersection. It wants to turn left into the driveway. There is a hero vehicle on the road. It wants to turn right into the driveway. When the ego is ego distance behind conflict point m behind the conflict point and the hero vehicle is distance behind conflict point m behi...
-
[57]
It wants to turn left into the driveway
Ego is on the road and it is initial ego distance behind intersection m behind the intersection. It wants to turn left into the driveway. There is a hero vehicle on the road. It wants to turn right into the driveway. When the ego is ego distance behind conflict point m behind the conflict point and the hero vehicle is dis- tance behind conflict point m be...
-
[58]
It wants to turn left into the driveway
Ego is on the road and it is initial ego distance behind intersection m behind the intersection. It wants to turn left into the driveway. There is a hero vehicle on the driveway. It wants to turn left onto the road travelling eastbound. When the ego is ego distance behind conflict point m behind the conflict point and the hero vehicle is hero distance beh...
-
[59]
It wants to turn left into the driveway
Ego is on the road and it is initial ego distance behind intersection m behind the intersection. It wants to turn left into the driveway. There is a hero vehicle on the driveway. It wants to turn left onto the road travelling eastbound. When the ego is ego distance behind conflict point m behind the conflict point and the hero vehicle is hero distance beh...
-
[60]
It wants to turn left into the driveway
Ego is on the road and it is initial ego distance behind intersection m behind the intersection. It wants to turn left into the driveway. There is a hero vehicle on the driveway. It wants to turn left onto the road travelling eastbound. When the ego is ego distance behind conflict point m behind the conflict point and the hero vehicle is hero distance beh...
-
[61]
It wants to turn right onto the road travelling westbound
Ego is on the driveway exit and it is initial ego tta behind stop line s from the stop line. It wants to turn right onto the road travelling westbound. There is a hero vehicle on the driveway exit and it is initial hero tta behind stop line s from the stop line. It wants to turn right onto the road travelling westbound. When the ego is ego distance behind...
-
[62]
It wants to turn right onto the road travelling westbound
Ego is on the driveway exit and it is initial ego tta behind stop line s from the stop line. It wants to turn right onto the road travelling westbound. There is a hero vehicle on the road. It wants to lane follow along the road travelling westbound. When the ego is ego tta behind stop line s from the stop line and the hero vehicle is hero tta behind confl...
-
[63]
It wants to turn right onto the road travelling westbound
Ego is on the driveway exit and it is initial ego tta behind stop line s from the stop line. It wants to turn right onto the road travelling westbound. There is a hero vehicle on the road. It wants to lane follow along the road travelling westbound. When the ego is ego tta behind stop line s from the stop line and the hero vehicle is tta behind conflict p...
-
[64]
It wants to turn right onto the road travelling westbound
Ego is on the driveway exit and it is initial ego tta behind stop line s from the stop line. It wants to turn right onto the road travelling westbound. There is a hero vehicle on the road. It wants to lane follow along the road travelling westbound. When the ego is ego tta behind stop line s from the stop line and the hero vehicle is tta behind conflict p...
-
[65]
It wants to turn left onto the road travelling eastbound
Ego is on the driveway exit and it is initial ego tta behind stop line s from the stop line. It wants to turn left onto the road travelling eastbound. There is a hero vehicle on the driveway exit and it is initial hero tta behind stop line s from the stop line. It wants to turn left onto the road travelling eastbound. When the ego is ego distance behind h...
-
[66]
It wants to turn left onto the road travelling eastbound
Ego is on the driveway exit and it is initial ego tta behind stop line s from the stop line. It wants to turn left onto the road travelling eastbound. There is a hero vehicle on the road. It wants to lane follow along the road travelling westbound. When the ego is ego tta behind stop line s from the stop line and the hero vehicle is hero tta behind confli...
-
[67]
It wants to turn left onto the road travelling eastbound
Ego is on the driveway exit and it is initial ego tta behind stop line s from the stop line. It wants to turn left onto the road travelling eastbound. There is a hero vehicle on the road. It wants to lane follow along the road travelling westbound. When the ego is ego tta behind stop line s from the stop line and the hero vehicle is tta behind conflict po...
-
[68]
It wants to turn left onto the road travelling eastbound
Ego is on the driveway exit and it is initial ego tta behind stop line s from the stop line. It wants to turn left onto the road travelling eastbound. There is a hero vehicle on the road. It wants to lane follow along the road travelling westbound. When the ego is ego tta behind stop line s from the stop line and the hero vehicle is tta behind conflict po...
-
[69]
It wants to turn left onto the road travelling eastbound
Ego is on the driveway exit and it is initial ego tta behind stop line s from the stop line. It wants to turn left onto the road travelling eastbound. There is a hero vehicle on the road. It wants to lane follow along the road travelling eastbound. When the ego is ego tta behind stop line s from the stop line and the hero vehicle is hero tta behind confli...
-
[70]
It wants to turn left onto the road travelling eastbound
Ego is on the driveway exit and it is initial ego tta behind stop line s from the stop line. It wants to turn left onto the road travelling eastbound. There is a hero vehicle on the road. It wants to lane follow along the road travelling eastbound. When the ego is ego tta behind stop line s from the stop line and the hero vehicle is tta behind conflict po...
-
[71]
It wants to turn left onto the road travelling eastbound
Ego is on the driveway exit and it is initial ego tta behind stop line s from the stop line. It wants to turn left onto the road travelling eastbound. There is a hero vehicle on the road. It wants to lane follow along the road travelling eastbound. When the ego is ego tta behind stop line s from the stop line and the hero vehicle is tta behind conflict po...
-
[72]
It wants to turn left onto the road travelling eastbound
Ego is on the driveway exit and it is initial ego tta behind stop line s from the stop line. It wants to turn left onto the road travelling eastbound. There is a hero vehicle on the road. It wants to turn left into the driveway. When the ego is ego tta behind stop line s from the stop line and the hero vehicle is hero tta behind conflict point s from the ...
-
[73]
It wants to turn left onto the road travelling eastbound
Ego is on the driveway exit and it is initial ego tta behind stop line s from the stop line. It wants to turn left onto the road travelling eastbound. There is a hero vehicle on the road. It wants to turn left into the driveway. When the ego is ego tta behind stop line s from the stop line and the hero vehicle is tta behind conflict point s from the confl...
-
[74]
It wants to turn left onto the road travelling eastbound
Ego is on the driveway exit and it is initial ego tta behind stop line s from the stop line. It wants to turn left onto the road travelling eastbound. There is a hero vehicle on the road. It wants to turn left into the driveway. When the ego is ego tta behind stop line s from the stop line and the hero vehicle is tta behind conflict point s from the confl...
-
[75]
It wants to lane follow along the road travelling westbound
Ego is on the road and it is initial ego tta behind intersection s from the intersection. It wants to lane follow along the road travelling westbound. There is a hero vehicle on the road. It wants to lane follow along the road travelling westbound. When the ego is ego distance behind hero m behind the hero vehicle, the hero vehicle begins to decelerate to...
-
[76]
It wants to lane follow along the road travelling westbound
Ego is on the road and it is initial ego tta behind intersection s from the intersection. It wants to lane follow along the road travelling westbound. There is a hero vehicle on the road. It wants to turn left into the driveway. When the ego is ego tta behind conflict point s from the conflict point and the hero vehicle is hero tta behind conflict point s...
-
[77]
It wants to lane follow along the road travelling westbound
Ego is on the road and it is initial ego tta behind intersection s from the intersection. It wants to lane follow along the road travelling westbound. There is a hero vehicle on the road. It wants to turn left into the driveway. When the ego is ego tta behind conflict point s from the conflict point and the hero vehicle is hero tta behind conflict point s...
-
[78]
It wants to lane follow along the road travelling westbound
Ego is on the road and it is initial ego tta behind intersection s from the intersection. It wants to lane follow along the road travelling westbound. There is a hero vehicle on the road. It wants to turn left into the driveway. When the ego is ego tta behind conflict point s from the conflict point and the hero vehicle is hero tta behind conflict point s...
-
[79]
It wants to lane follow along the road travelling westbound
Ego is on the road and it is initial ego tta behind intersection s from the intersection. It wants to lane follow along the road travelling westbound. There is a hero vehicle on the driveway. It wants to turn right onto the road travelling westbound. When the ego is ego tta behind conflict point s from the conflict point and the hero vehicle is hero tta b...
-
[80]
It wants to lane follow along the road travelling westbound
Ego is on the road and it is initial ego tta behind intersection s from the intersection. It wants to lane follow along the road travelling westbound. There is a hero vehicle on the driveway. It wants to turn right onto the road travelling westbound. When the ego is ego tta behind conflict point s from the conflict point and the hero vehicle is hero tta b...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.