DySurface: Consistent 4D Surface Reconstruction via Bridging Explicit Gaussians and Implicit Functions
Pith reviewed 2026-05-13 07:50 UTC · model grok-4.3
The pith
DySurface uses deformed Gaussians to build voxel grids that guide implicit SDFs for consistent dynamic surfaces.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
DySurface resolves the structural discrepancy between forward Gaussian deformation (canonical to dynamic) and backward SDF deformation (dynamic to canonical) by constructing a dynamic sparse voxel grid from the deformed Gaussians. This grid supplies explicit geometric guidance to the implicit SDF field, regularizing volumetric rendering to produce surfaces with watertight boundaries and detailed representations in dynamic scenes.
What carries the argument
The VoxGS-DSDF branch, which turns deformed Gaussians into a dynamic sparse voxel grid that anchors and guides the implicit SDF during volumetric rendering.
If this is right
- Higher geometric accuracy scores than prior dynamic surface methods on standard benchmarks.
- Surfaces remain connected and detailed across frames without extra post-processing.
- Rendering quality stays competitive with pure Gaussian or NeRF baselines.
- The same explicit-implicit anchoring pattern applies to other hybrid dynamic reconstruction pipelines.
Where Pith is reading between the lines
- The voxel-grid anchoring idea could stabilize hybrid models in related tasks such as dynamic fluid or cloth simulation.
- If voxel construction is made incremental, the approach might support online 4D capture systems.
- Similar guidance mechanisms could reduce drift in long-sequence reconstruction without retraining per scene.
Load-bearing premise
The sparse voxel grid built from deformed Gaussians can bridge the forward-backward deformation mismatch without adding new inconsistencies or needing per-scene adjustments.
What would settle it
Reconstruct a dynamic scene with known ground-truth surfaces; if the output meshes still show temporal discontinuities or holes where the voxel grid was applied, the bridging claim fails.
Figures









read the original abstract
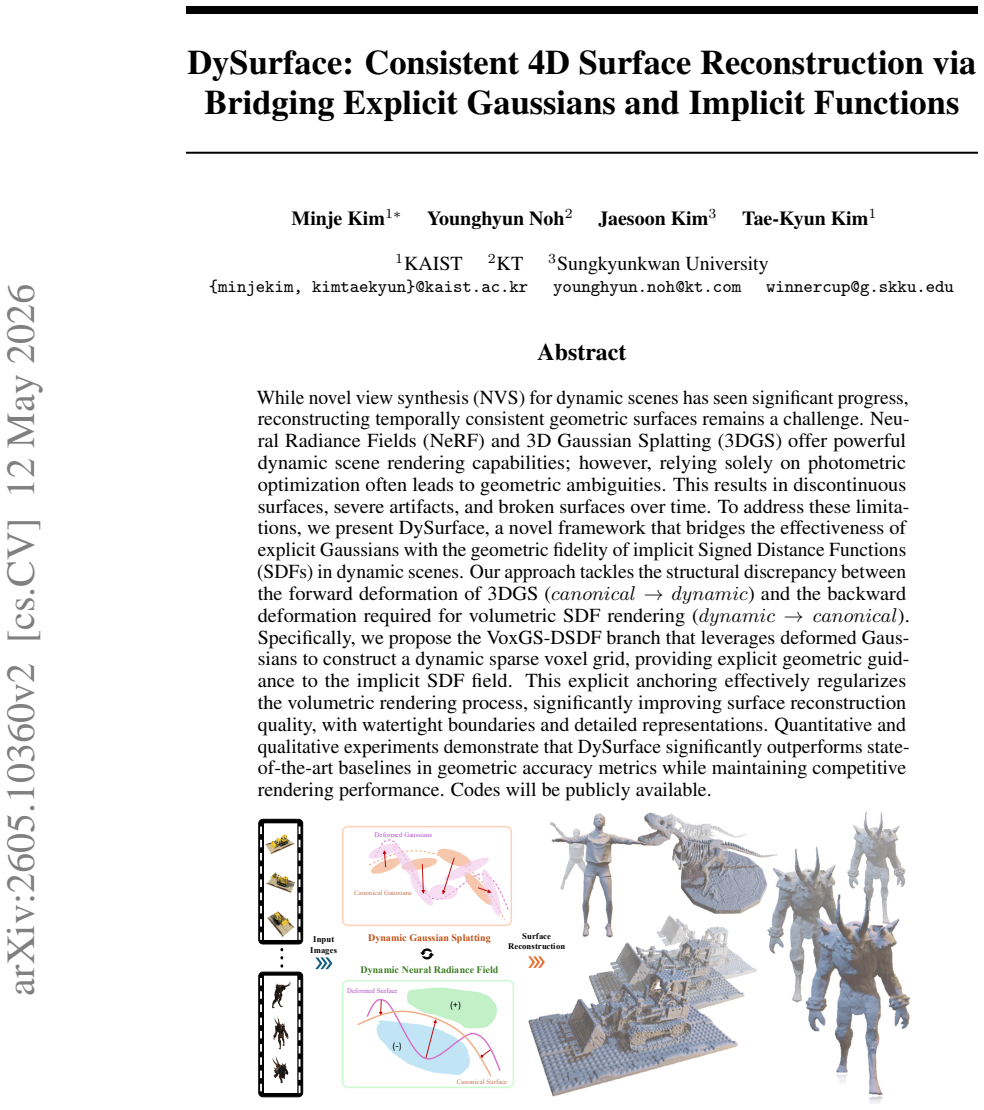
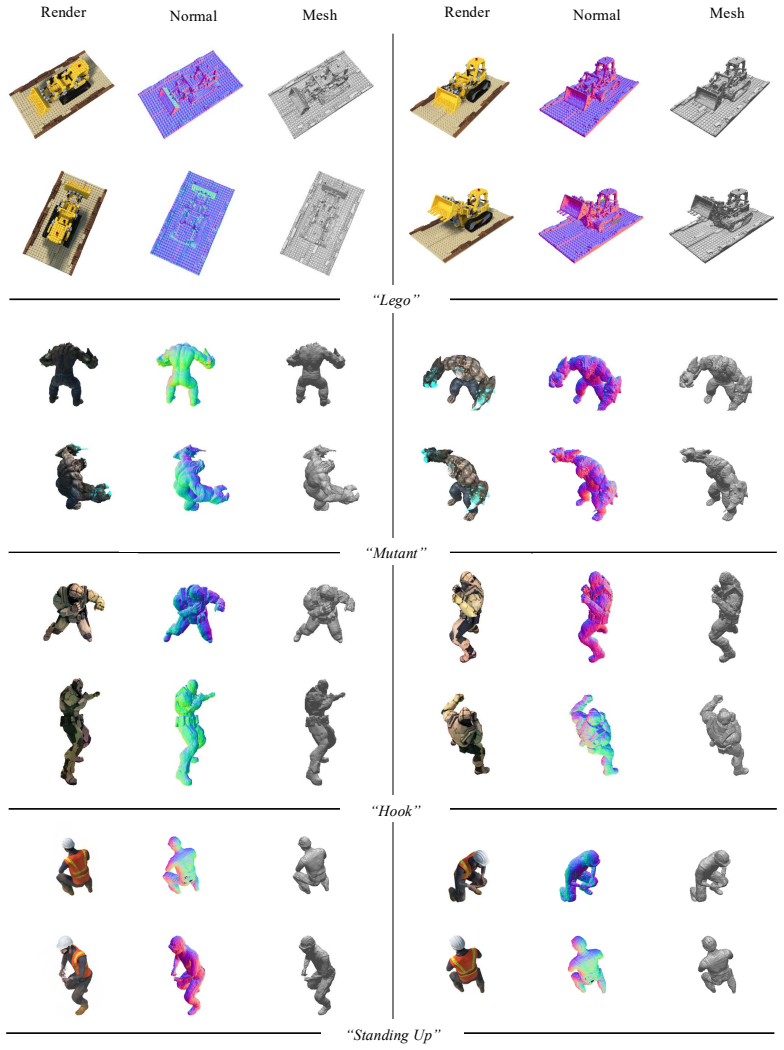
While novel view synthesis (NVS) for dynamic scenes has seen significant progress, reconstructing temporally consistent geometric surfaces remains a challenge. Neural Radiance Fields (NeRF) and 3D Gaussian Splatting (3DGS) offer powerful dynamic scene rendering capabilities; however, relying solely on photometric optimization often leads to geometric ambiguities. This results in discontinuous surfaces, severe artifacts, and broken surfaces over time. To address these limitations, we present DySurface, a novel framework that bridges the effectiveness of explicit Gaussians with the geometric fidelity of implicit Signed Distance Functions (SDFs) in dynamic scenes. Our approach tackles the structural discrepancy between the forward deformation of 3DGS ($canonical \rightarrow dynamic$) and the backward deformation required for volumetric SDF rendering ($dynamic \rightarrow canonical$). Specifically, we propose the VoxGS-DSDF branch that leverages deformed Gaussians to construct a dynamic sparse voxel grid, providing explicit geometric guidance to the implicit SDF field. This explicit anchoring effectively regularizes the volumetric rendering process, significantly improving surface reconstruction quality, with watertight boundaries and detailed representations. Quantitative and qualitative experiments demonstrate that DySurface significantly outperforms state-of-the-art baselines in geometric accuracy metrics while maintaining competitive rendering performance.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes DySurface, a hybrid framework for temporally consistent 4D surface reconstruction from dynamic scenes. It combines explicit 3D Gaussian Splatting (forward deformation from canonical to dynamic) with implicit SDF-based volumetric rendering (requiring backward deformation) by introducing the VoxGS-DSDF branch: deformed Gaussians are used to construct a dynamic sparse voxel grid that supplies explicit occupancy and normal guidance to regularize the implicit SDF field, mitigating geometric ambiguities, discontinuities, and artifacts that arise from photometric optimization alone.
Significance. If the bridging mechanism proves robust, the work would represent a meaningful advance in dynamic scene reconstruction by demonstrating how explicit geometric anchors can stabilize implicit surface optimization without sacrificing rendering quality. The approach targets a recognized pain point (inconsistent surfaces over time) and reports quantitative gains in geometric metrics alongside competitive NVS performance, which could influence future hybrid explicit-implicit pipelines for applications requiring watertight 4D geometry.
major comments (2)
- [§3.2] §3.2 (VoxGS-DSDF branch): The construction of the dynamic sparse voxel grid from deformed Gaussians is described at a high level, but the paper does not provide a formal analysis or bound showing that the resulting occupancy and normal fields are sufficiently dense to constrain the SDF query points used by the volumetric renderer in regions of low Gaussian density or highly non-rigid motion; without this, the regularization claim remains unverified.
- [§4.3] §4.3 and Table 3: The reported improvements in geometric accuracy (e.g., Chamfer distance, normal consistency) are presented without an ablation that isolates the contribution of the voxel-grid guidance versus other regularization terms or hyper-parameter choices; this makes it difficult to attribute the gains specifically to the forward-to-backward bridging mechanism.
minor comments (2)
- [§3.1] Notation for the forward and backward deformation mappings is introduced inconsistently across equations; a single unified diagram or table would improve clarity.
- The supplementary video is referenced but not described in the main text; a brief summary of failure cases shown in the video would help readers assess robustness.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help clarify the presentation of our bridging mechanism. We address each major comment below and will incorporate revisions to strengthen the claims.
read point-by-point responses
-
Referee: [§3.2] §3.2 (VoxGS-DSDF branch): The construction of the dynamic sparse voxel grid from deformed Gaussians is described at a high level, but the paper does not provide a formal analysis or bound showing that the resulting occupancy and normal fields are sufficiently dense to constrain the SDF query points used by the volumetric renderer in regions of low Gaussian density or highly non-rigid motion; without this, the regularization claim remains unverified.
Authors: We acknowledge that the current manuscript lacks a formal density bound or mathematical guarantee for coverage in low-Gaussian-density or highly non-rigid regions. The VoxGS-DSDF branch populates the sparse voxel grid from deformed Gaussian centers and covariances, providing occupancy and normals only where Gaussians are present; photometric loss continues to supervise the SDF elsewhere. To address the concern, we will expand §3.2 with a detailed description of the voxelization process (including pseudocode), an empirical analysis of guidance-point density across motion types, and additional visualizations of voxel coverage on challenging sequences. These additions will make the regularization mechanism more transparent without claiming a formal bound. revision: partial
-
Referee: [§4.3] §4.3 and Table 3: The reported improvements in geometric accuracy (e.g., Chamfer distance, normal consistency) are presented without an ablation that isolates the contribution of the voxel-grid guidance versus other regularization terms or hyper-parameter choices; this makes it difficult to attribute the gains specifically to the forward-to-backward bridging mechanism.
Authors: We agree that isolating the voxel-grid guidance is necessary to attribute gains specifically to the bridging mechanism. In the revised version we will add a dedicated ablation subsection in §4.3 that compares (i) the full DySurface model, (ii) the model without the VoxGS-DSDF branch (photometric SDF optimization only), and (iii) variants ablating individual regularization terms. The updated Table 3 will report these results alongside the original metrics, allowing readers to quantify the contribution of the forward-to-backward guidance. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The provided abstract and description present DySurface as introducing a VoxGS-DSDF branch that constructs a dynamic sparse voxel grid from deformed Gaussians to guide the implicit SDF field. No equations, self-definitions, fitted parameters renamed as predictions, or load-bearing self-citations are exhibited that would reduce the claimed surface consistency or watertight boundaries directly to the input data or prior fitted values by construction. The bridging mechanism is described as a novel regularization step without reducing to tautology or self-referential fitting. This matches the reader's assessment of only minor (score 2) issues at most, with the central claim retaining independent technical content.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
3D Gaussian splatting for real-time radiance field rendering
Bernhard Kerbl, Georgios Kopanas, Thomas Leimk \"u hler, and George Drettakis. 3D Gaussian splatting for real-time radiance field rendering. In SIGGRAPH, 2023
work page 2023
-
[2]
D-NeRF: Neural radiance fields for dynamic scenes
Albert Pumarola, Enric Corona, Gerard Pons-Moll, and Francesc Moreno-Noguer. D-NeRF: Neural radiance fields for dynamic scenes. In CVPR, 2021
work page 2021
-
[3]
Fast dynamic radiance fields with time-aware neural voxels
Jiemin Fang, Taoran Yi, Xinggang Wang, Lingxi Xie, Xiaopeng Zhang, Wenyu Liu, Matthias Nießner, and Qi Tian. Fast dynamic radiance fields with time-aware neural voxels. In SIGGRAPH Asia, 2022
work page 2022
-
[4]
Neural deformable voxel grid for fast optimization of dynamic view synthesis
Xiang Guo, Guanying Chen, Yuchao Dai, Xiaoqing Ye, Jiadai Sun, Xiao Tan, and Errui Ding. Neural deformable voxel grid for fast optimization of dynamic view synthesis. In ACCV, 2022
work page 2022
-
[5]
FDNeRF: Few-shot dynamic neural radiance fields for face reconstruction and expression editing
Jingbo Zhang, Xiaoyu Li, Ziyu Wan, Can Wang, and Jing Liao. FDNeRF: Few-shot dynamic neural radiance fields for face reconstruction and expression editing. In SIGGRAPH Asia, 2022
work page 2022
-
[6]
4D Gaussian splatting for real-time dynamic scene rendering
Guanjun Wu, Taoran Yi, Jiemin Fang, Lingxi Xie, Xiaopeng Zhang, Wei Wei, Wenyu Liu, Qi Tian, and Xinggang Wang. 4D Gaussian splatting for real-time dynamic scene rendering. In CVPR, 2024
work page 2024
-
[7]
Dynamic Gaussians Mesh: Consistent Mesh Reconstruction from Monocular Videos
Isabella Liu, Hao Su, and Xiaolong Wang. Dynamic Gaussians Mesh: Consistent Mesh Reconstruction from Monocular Videos. In ICLR, 2025
work page 2025
-
[8]
3D geometry-aware deformable Gaussian splatting for dynamic view synthesis
Zhiwen Lu, Xiang Guo, Le Hui, Tianrui Chen, Min Yang, Xiao Tang, Feng Zhu, and Yuchao Dai. 3D geometry-aware deformable Gaussian splatting for dynamic view synthesis. In CVPR, 2024
work page 2024
-
[9]
3D Gaussian splatting for real-time radiance field rendering , author=. TOG , year=
-
[10]
NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis , author=. 2020 , booktitle=
work page 2020
-
[11]
Peng Wang and Lingjie Liu and Yuan Liu and Christian Theobalt and Taku Komura and Wenping Wang , title =. NeurIPS , year =
-
[12]
Dynamic Gaussians Mesh: Consistent Mesh Reconstruction from Monocular Videos , author=. ICLR , year=
- [13]
-
[14]
Fast Dynamic Radiance Fields with Time-Aware Neural Voxels , year =
Fang, Jiemin and Yi, Taoran and Wang, Xinggang and Xie, Lingxi and Zhang, Xiaopeng and Liu, Wenyu and Nie. Fast Dynamic Radiance Fields with Time-Aware Neural Voxels , year =
- [15]
-
[16]
4D Gaussian Splatting for Real-Time Dynamic Scene Rendering , author =. CVPR , year =
-
[17]
3D geometry-aware deformable Gaussian splatting for dynamic view synthesis , author=. CVPR , year=
- [18]
-
[19]
Neuralangelo: High-Fidelity Neural Surface Reconstruction , author=. CVPR , year=
-
[20]
SuGaR: Surface-Aligned Gaussian Splatting for Efficient 3D Mesh Reconstruction and High-Quality Mesh Rendering , author=. CVPR , year=
-
[21]
Yaniv Wolf and Amit Bracha and Ron Kimmel , booktitle=
-
[22]
3DGS-to-PC: 3D Gaussian Splatting to Dense Point Clouds , author =. ICCV , year =
-
[23]
Gsdf: 3dgs meets sdf for improved rendering and reconstruction , author=. NeurIPS , year=
-
[24]
and Bouaziz, Sofien and Goldman, Dan B and Seitz, Steven M
Park, Keunhong and Sinha, Utkarsh and Barron, Jonathan T. and Bouaziz, Sofien and Goldman, Dan B and Seitz, Steven M. and Martin-Brualla, Ricardo , title =. ICCV , year =
-
[25]
Gaussian Splatting with Discretized SDF for Relightable Assets , author =. ICCV , year =
-
[26]
Lorensen, William E. and Cline, Harvey E. , title =. SIGGRAPH , year =
-
[27]
Guo, Xiang and Chen, Guanying and Dai, Yuchao and Ye, Xiaoqing and Sun, Jiadai and Tan, Xiao and Ding, Errui , title =. ACCV , year =
-
[28]
Guo, Xiang and Sun, Jiadai and Dai, Yuchao and Chen, Guanying and Ye, Xiaoqing and Tan, Xiao and Ding, Errui and Zhang, Yumeng and Wang, Jingdong , title =. ICCV , year =
-
[29]
Liu, Yu-Lun and Gao, Chen and Meuleman, Andreas and Tseng, Hung-Yu and Saraf, Ayush and Kim, Changil and Chuang, Yung-Yu and Kopf, Johannes and Huang, Jia-Bin , title =. CVPR , year =
-
[30]
Buehler, Chris and Bosse, Michael and McMillan, Leonard and Gortler, Steven and Cohen, Michael , title =. SIGGRAPH , year =
-
[31]
Tretschk, Edgar and Tewari, Ayush and Golyanik, Vladislav and Zollh. Non-rigid neural radiance fields: Reconstruction and novel view synthesis of a dynamic scene from monocular video , booktitle =
-
[32]
Turki, Haithem and Zhang, Jason Y and Ferroni, Francesco and Ramanan, Deva , title =. CVPR , year =
-
[33]
Chen, Jie and Hu, Zhangchi and Wu, Peixi and Zhu, Huyue and Li, Hebei and Sun, Xiaoyan , title =. ICCV , year =
-
[34]
Jiawei, Xu and Zexin, Fan and Jian, Yang and Jin, Xie , booktitle =
-
[35]
Gan, Wanshui and Xu, Hongbin and Huang, Yi and Chen, Shifeng and Yokoya, Naoto , title =. TVCG , year =
-
[36]
K-Planes: Explicit Radiance Fields in Space, Time, and Appearance , author=. CVPR , year =
- [37]
- [38]
-
[39]
IEEE Computer Graphics and Applications , year =
Greene, Ned , title =. IEEE Computer Graphics and Applications , year =
- [40]
-
[41]
Advances in neural rendering , booktitle =
Tewari, Ayush and Fried, O and Thies, J and Sitzmann, V and Lombardi, S and Xu, Z and Simon, T and Nie. Advances in neural rendering , booktitle =
-
[42]
Neural Scene Flow Fields for Space-Time View Synthesis of Dynamic Scenes , author=. CVPR , year=
-
[43]
Jingyang Zhang and Yao Yao and Shiwei Li and Tian Fang and David McKinnon and Yanghai Tsin and Long Quan , title =. CVPR , year =
-
[44]
Park, Jeong Joon and Florence, Peter and Straub, Julian and Newcombe, Richard and Lovegrove, Steven , title =. CVPR , year =
-
[45]
Yariv, Lior and Kasten, Yoni and Moran, Dror and Galun, Meirav and Atzmon, Matan and Ronen, Basri and Lipman, Yaron , title=. NeurIPS , year=
-
[46]
Chen, Danpeng and Li, Hai and Ye, Weicai and Wang, Yifan and Xie, Weijian and Zhai, Shangjin and Wang, Nan and Liu, Haomin and Bao, Hujun and Zhang, Guofeng , title=. TVCG , year=
-
[47]
Neusg: Neural implicit surface reconstruction with 3d gaussian splatting guidance, 2025
Chen, Hanlin and Li, Chen and Lee, Gim Hee , title=. arXiv preprint arXiv:2312.00846 , year=
-
[48]
Xiaoyang Lyu and Yang-Tian Sun and Yi-Hua Huang and Xiuzhe Wu and Ziyi Yang and Yilun Chen and Jiangmiao Pang and Xiaojuan Qi , title =. TOG , year =
-
[49]
Huang, Binbin and Yu, Zehao and Chen, Anpei and Geiger, Andreas and Gao, Shenghua , title=. SIGGRAPH , year =
-
[50]
The Unreasonable Effectiveness of Deep Features as a Perceptual Metric , author=. CVPR , year=
-
[51]
VoxelSplat: Dynamic Gaussian Splatting as an Effective Loss for Occupancy and Flow Prediction , author=. CVPR , year=
- [52]
- [53]
-
[54]
Wang, Zhou and Bovik, Alan C and Sheikh, Hamid R and Simoncelli, Eero P , title=. IEEE TIP , year=
-
[55]
Tenenbaum and Jiajun Wu , title =
Yilun Du and Yinan Zhang and Hong-Xing Yu and Joshua B. Tenenbaum and Jiajun Wu , title =. ICCV , year=
-
[56]
Real-time Photorealistic Dynamic Scene Representation and Rendering with 4D Gaussian Splatting , author=. ICLR , year=
-
[57]
Learning Signed Distance Field for Multi-view Surface Reconstruction , author=. ICCV , year=
-
[58]
Toussaint, Briac and Thomas, Diego and Franco, Jean-S\'ebastien , title =. CVPR , year =
-
[59]
Zhang, Shuai and Wu, Guanjun and Xie, Zhoufeng and Wang, Xinggang and Feng, Bin and Liu, Wenyu , title =. ACM MM , year =
-
[60]
PyTorch: An Imperative Style, High-Performance Deep Learning Library , author=. NIPS , year=
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.