Recognition: no theorem link
Mapping Embodied Affective Touch Strategies on a Humanoid Robot
Pith reviewed 2026-05-13 05:27 UTC · model grok-4.3
The pith
Affective touch expression on humanoid robots depends on body region and embodiment constraints.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
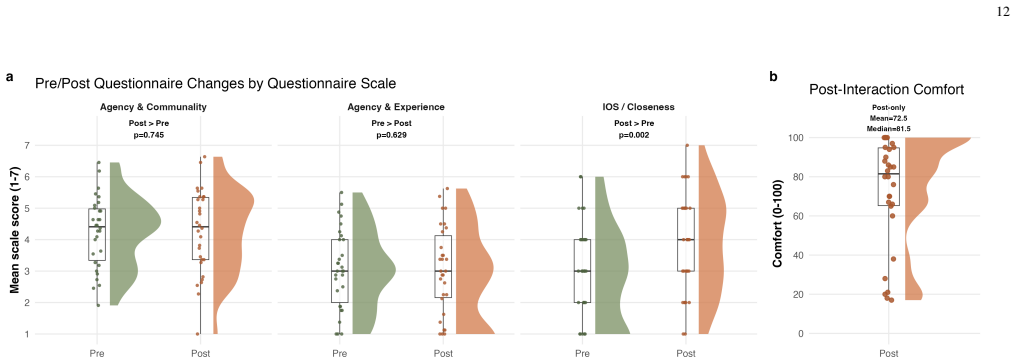
Body region and spatial constraints jointly shaped both touch location and dynamics when participants expressed emotions on the iCub. In free touch, participants preferred socially accessible upper-body regions, while less frequently touched areas showed stronger emotion-specific selectivity. Emotion-related variation was more evident in motion features for arm-only touch and pressure features for torso-only touch. Touch strategies also did not transfer directly between free and constrained conditions, even within the same coarse body region. Participants reported increased closeness to the robot after interaction, with around 30 percent reporting a change in perceived social relationship.
What carries the argument
The within-subjects experimental design comparing free full-body touch against arm-only and torso-only constrained conditions on a robot with distributed tactile sensors to map how embodiment affects affective touch expression.
Load-bearing premise
The differences in touch location and dynamics between free and constrained conditions are caused by embodiment effects and not by the order of conditions, fatigue, or participants guessing the study's purpose.
What would settle it
If a follow-up experiment using separate groups for each touch condition (between-subjects) finds no significant differences in touch strategies or emotion selectivity by region, this would challenge the embodiment constraint explanation.
Figures








read the original abstract
Affective touch in human-robot interaction is shaped not only by emotional intent, but also by robot embodiment, including touch location, physical constraints, and perceived agency or social role. Existing HRI studies typically focus on one or two isolated body parts, limiting understanding of how affective touch generalises across the full humanoid body. We present a study with 32 participants interacting with the iCub robot, which is equipped with full-body distributed tactile sensors. Participants expressed eight emotions under three conditions: free touch, arm-only touch, and torso-only touch. Results show that body region and spatial constraints jointly shaped both touch location and dynamics. In free touch, participants preferred socially accessible upper-body regions, while less frequently touched areas showed stronger emotion-specific selectivity. Emotion-related variation was more evident in motion features for arm-only touch and pressure features for torso-only touch. Touch strategies also did not transfer directly between free and constrained conditions, even within the same coarse body region. Participants reported increased closeness to the robot after interaction, with around 30 percent reporting a change in perceived social relationship. Together, these findings show that affective touch expression is strongly body-region dependent and shaped by embodiment constraints.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript reports an empirical study with 32 participants who expressed eight emotions via touch on the iCub humanoid robot (equipped with full-body tactile sensors) under three within-subjects conditions: free touch, arm-only touch, and torso-only touch. Key findings include body-region preferences (upper-body in free touch), stronger emotion-specific selectivity in less-accessed areas, differential reliance on motion features (arm-only) versus pressure features (torso-only), non-transfer of strategies across conditions, and increased perceived closeness to the robot post-interaction (with ~30% reporting changed social relationship). The central claim is that affective touch expression is strongly body-region dependent and shaped by embodiment constraints.
Significance. If the results hold after addressing design and analysis issues, the work offers a valuable full-body empirical mapping of affective touch strategies in HRI, extending prior studies limited to isolated body parts. The distributed tactile sensing setup is a clear strength, enabling fine-grained analysis of location and dynamics. This could inform robot design for more naturalistic emotional touch interactions, emphasizing embodiment's role in social touch.
major comments (3)
- [Methods] Methods section (experimental procedure): The within-subjects design has each of the 32 participants perform all three conditions (free, arm-only, torso-only) while expressing the same eight emotions, yet the description provides no indication that condition order was randomized or counterbalanced, nor any modeling of order, session position, or carry-over effects (e.g., via mixed-effects terms). This directly threatens the central claim, as differences in touch location, dynamics, and feature reliance could reflect sequence, fatigue, or demand characteristics rather than embodiment constraints.
- [Results] Results section: Directional claims about body-region dependence, emotion selectivity, and differential motion/pressure feature use are presented without statistical tests, effect sizes, participant demographics, exact feature definitions, or correction for multiple comparisons. Post-hoc region selectivity assertions appear to rest on unshown data partitions, undermining support for the abstract's conclusion that touch is 'strongly body-region dependent.'
- [Discussion] Discussion section: The interpretation that non-transfer of strategies and feature differences primarily reflect embodiment effects (rather than the within-subjects confounds noted above) lacks supporting analyses or explicit discussion of alternative explanations, making the load-bearing claim about embodiment constraints vulnerable.
minor comments (1)
- [Abstract] Abstract: The phrasing 'around 30 percent' for participants reporting changed social relationship would be more precise with the exact value and any associated statistical support.
Simulated Author's Rebuttal
We thank the referee for their constructive and detailed comments. We address each major comment below and have revised the manuscript to incorporate additional methodological details, statistical analyses, and expanded discussion as appropriate.
read point-by-point responses
-
Referee: [Methods] Methods section (experimental procedure): The within-subjects design has each of the 32 participants perform all three conditions (free, arm-only, torso-only) while expressing the same eight emotions, yet the description provides no indication that condition order was randomized or counterbalanced, nor any modeling of order, session position, or carry-over effects (e.g., via mixed-effects terms). This directly threatens the central claim, as differences in touch location, dynamics, and feature reliance could reflect sequence, fatigue, or demand characteristics rather than embodiment constraints.
Authors: We appreciate the referee highlighting this omission. The condition order was counterbalanced across participants using a balanced Latin square design, but this detail was not stated in the original manuscript. We have revised the Methods section to describe the counterbalancing procedure explicitly. We have also conducted additional mixed-effects modeling with order and session position as factors (participant as random effect) and found no significant effects on touch location preferences or feature reliance (all p > 0.05). These results will be reported in the revised Results section and support that the differences arise from embodiment constraints. revision: yes
-
Referee: [Results] Results section: Directional claims about body-region dependence, emotion selectivity, and differential motion/pressure feature use are presented without statistical tests, effect sizes, participant demographics, exact feature definitions, or correction for multiple comparisons. Post-hoc region selectivity assertions appear to rest on unshown data partitions, undermining support for the abstract's conclusion that touch is 'strongly body-region dependent.'
Authors: We agree that the Results section requires more rigorous statistical reporting to substantiate the claims. Participant demographics are already provided in the Methods section; we will add explicit cross-references. Feature definitions (motion velocity, pressure variance, etc.) are in the supplementary materials and will now be summarized in the main text. We have performed repeated-measures ANOVAs for region preferences and feature differences, with post-hoc Tukey tests and Bonferroni correction, and report effect sizes (partial eta-squared). The region selectivity analyses use the full dataset partitioned by condition and emotion; we will include the statistical tables and supporting figures in the revision. revision: yes
-
Referee: [Discussion] Discussion section: The interpretation that non-transfer of strategies and feature differences primarily reflect embodiment effects (rather than the within-subjects confounds noted above) lacks supporting analyses or explicit discussion of alternative explanations, making the load-bearing claim about embodiment constraints vulnerable.
Authors: We have expanded the Discussion to address alternative explanations directly. We now discuss potential confounds including order effects, fatigue, and demand characteristics, while referencing the new mixed-effects analyses showing no significant order effects. We also highlight that non-transfer of strategies was observed even in within-region comparisons (e.g., arm in free touch vs. arm-only condition), which helps isolate embodiment effects. The revised text presents a more balanced view while maintaining that the within-subjects design and region-specific patterns support the role of embodiment constraints. revision: yes
Circularity Check
No circularity: purely empirical behavioral study
full rationale
The paper reports results from a within-subjects human-robot interaction experiment with 32 participants expressing emotions via touch on an iCub robot under free, arm-only, and torso-only conditions. All claims rest on direct observation of touch locations, motion/pressure features, emotion selectivity, and post-interaction questionnaires. No equations, models, fitted parameters, predictions, or derivation chains appear in the abstract or described content. Central findings (body-region dependence, non-transfer of strategies) are presented as empirical patterns without reduction to self-defined inputs or self-citation load-bearing steps. The study is self-contained against external benchmarks of behavioral data collection and analysis.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Human participants can express distinct emotions through intentional touch on a robot's body
Reference graph
Works this paper leans on
-
[1]
The science of interpersonal touch: an overview,
A. Gallace and C. Spence, “The science of interpersonal touch: an overview,”Neuroscience & Biobehavioral Reviews, vol. 34, no. 2, pp. 246–259, 2010
work page 2010
-
[2]
Touch technology in affective human–, robot–, and virtual–human interactions: A survey,
T. Olugbade, L. He, P. Maiolino, D. Heylen, and N. Bianchi-Berthouze, “Touch technology in affective human–, robot–, and virtual–human interactions: A survey,”Proceedings of the IEEE, vol. 111, no. 10, pp. 1333–1354, 2023
work page 2023
-
[3]
The why, who and how of social touch,
J. T. Suvilehto, A. Cekaite, and I. Morrison, “The why, who and how of social touch,”Nature Reviews Psychology, vol. 2, no. 10, pp. 606–621, 2023
work page 2023
-
[4]
Affective touch and regulation of stress responses,
T. Kidd, S. L. Devine, and S. C. Walker, “Affective touch and regulation of stress responses,”Health psychology review, vol. 17, no. 1, pp. 60–77, 2023
work page 2023
-
[5]
A. Serino and P. Haggard, “Touch and the body,”Neuroscience & Biobehavioral Reviews, vol. 34, no. 2, pp. 224–236, 2010
work page 2010
-
[6]
Embodied simulation and touch: The sense of touch in social cognition,
V . Gallese and S. Ebisch, “Embodied simulation and touch: The sense of touch in social cognition,”Phenomenology and Mind, no. 4, pp. 196– 210, 2013
work page 2013
-
[7]
A survey of tactile human–robot inter- actions,
B. D. Argall and A. G. Billard, “A survey of tactile human–robot inter- actions,”Robotics and autonomous systems, vol. 58, no. 10, pp. 1159– 1176, 2010
work page 2010
-
[8]
Social robots for education: A review,
T. Belpaeme, J. Kennedy, A. Ramachandran, B. Scassellati, and F. Tanaka, “Social robots for education: A review,”Science robotics, vol. 3, no. 21, p. eaat5954, 2018
work page 2018
-
[9]
S. M. Rabbitt, A. E. Kazdin, and B. Scassellati, “Integrating socially assistive robotics into mental healthcare interventions: Applications and recommendations for expanded use,”Clinical psychology review, vol. 35, pp. 35–46, 2015
work page 2015
-
[10]
Artificial emotional intelligence in socially assistive robots for older adults: a pilot study,
H. Abdollahi, M. H. Mahoor, R. Zandie, J. Siewierski, and S. H. Qualls, “Artificial emotional intelligence in socially assistive robots for older adults: a pilot study,”IEEE Transactions on Affective Computing, vol. 14, no. 3, pp. 2020–2032, 2022
work page 2020
-
[11]
Children conform, adults resist: A robot group induced peer pressure on normative social conformity,
A.-L. V ollmer, R. Read, D. Trippas, and T. Belpaeme, “Children conform, adults resist: A robot group induced peer pressure on normative social conformity,”Science robotics, vol. 3, no. 21, p. eaat7111, 2018
work page 2018
-
[12]
Human-robot interaction in rehabilitation and assistance: a review,
A. Mohebbi, “Human-robot interaction in rehabilitation and assistance: a review,”Current Robotics Reports, vol. 1, no. 3, pp. 131–144, 2020
work page 2020
-
[13]
Soft, wearable robotics and haptics: Technologies, trends, and emerging applications,
M. Zhu, S. Biswas, S. I. Dinulescu, N. Kastor, E. W. Hawkes, and Y . Visell, “Soft, wearable robotics and haptics: Technologies, trends, and emerging applications,”Proceedings of the IEEE, vol. 110, no. 2, pp. 246–272, 2022
work page 2022
-
[14]
Wearable soft technologies for haptic sensing and feedback,
J. Yin, R. Hinchet, H. Shea, and C. Majidi, “Wearable soft technologies for haptic sensing and feedback,”Advanced Functional Materials, vol. 31, no. 39, p. 2007428, 2021
work page 2021
-
[15]
Conveying emotions to robots through touch and sound,
Q. Ren, R. Proesmans, F. Bossuyt, J. Vanfleteren, F. Wyffels, and T. Belpaeme, “Conveying emotions to robots through touch and sound,” inInternational Conference on Social Robotics, pp. 329–339, Springer, 2024
work page 2024
-
[16]
Q. Ren and T. Belpaeme, “Touch speaks, sound feels: A multimodal approach to affective and social touch from robots to humans,”arXiv preprint arXiv:2508.07839, 2025
-
[17]
What can a robot’s skin be? designing texture- changing skin for human–robot social interaction,
Y . Hu and G. Hoffman, “What can a robot’s skin be? designing texture- changing skin for human–robot social interaction,”ACM Transactions on Human-Robot Interaction, vol. 12, no. 2, pp. 1–19, 2023
work page 2023
-
[18]
A 2d vibration array as an assistive device for visually impaired,
D. Dakopoulos, S. K. Boddhu, and N. Bourbakis, “A 2d vibration array as an assistive device for visually impaired,” in2007 IEEE 7th International Symposium on BioInformatics and BioEngineering, pp. 930–937, IEEE, 2007
work page 2007
-
[19]
Force-sensitive interface engineering in flexible pressure sensors: A review,
G. Tai, D. Wei, M. Su, P. Li, L. Xie, and J. Yang, “Force-sensitive interface engineering in flexible pressure sensors: A review,”Sensors, vol. 22, no. 7, p. 2652, 2022
work page 2022
-
[20]
Conveying emo- tions through device-initiated touch,
M. Teyssier, G. Bailly, C. Pelachaud, and E. Lecolinet, “Conveying emo- tions through device-initiated touch,”IEEE Transactions on Affective Computing, vol. 13, no. 3, pp. 1477–1488, 2020
work page 2020
-
[21]
What kinds of robot’s touch will match expressed emotions?,
X. Zheng, M. Shiomi, T. Minato, and H. Ishiguro, “What kinds of robot’s touch will match expressed emotions?,”IEEE Robotics and Automation Letters, vol. 5, no. 1, pp. 127–134, 2019
work page 2019
-
[22]
Tactile interaction with social robots influ- ences attitudes and behaviour,
Q. Ren and T. Belpaeme, “Tactile interaction with social robots influ- ences attitudes and behaviour,”International Journal of Social Robotics, vol. 16, no. 11, pp. 2297–2317, 2024
work page 2024
-
[23]
Design and evaluation of a touch-centered calming interaction with a social robot,
Y . S. Sefidgar, K. E. MacLean, S. Yohanan, H. M. Van der Loos, E. A. Croft, and E. J. Garland, “Design and evaluation of a touch-centered calming interaction with a social robot,”IEEE Transactions on Affective Computing, vol. 7, no. 2, pp. 108–121, 2015
work page 2015
-
[24]
J. J. Li, W. Ju, and B. Reeves, “Touching a mechanical body: tactile contact with body parts of a humanoid robot is physiologically arousing,” Journal of Human-Robot Interaction, vol. 6, no. 3, pp. 118–130, 2017
work page 2017
-
[25]
L. Pu, W. Moyle, and C. Jones, “How people with dementia perceive a therapeutic robot called paro in relation to their pain and mood: A qualitative study,”Journal of clinical nursing, vol. 29, no. 3-4, pp. 437– 446, 2020
work page 2020
-
[26]
Robots as intentional agents: using neuroscientific methods to make robots appear more social,
E. Wiese, G. Metta, and A. Wykowska, “Robots as intentional agents: using neuroscientific methods to make robots appear more social,” Frontiers in psychology, vol. 8, p. 1663, 2017
work page 2017
-
[27]
S. S. Kwak, Y . Kim, E. Kim, C. Shin, and K. Cho, “What makes people empathize with an emotional robot?: The impact of agency and physical embodiment on human empathy for a robot,” in2013 IEEE Ro-man, pp. 180–185, IEEE, 2013
work page 2013
-
[28]
How to touch humans: Guidelines for social agents and robots that can touch,
J. B. Van Erp and A. Toet, “How to touch humans: Guidelines for social agents and robots that can touch,” in2013 humaine association conference on affective computing and intelligent interaction, pp. 780– 785, IEEE, 2013
work page 2013
-
[29]
Responses to robot social roles and social role framing,
V . Groom, V . Srinivasan, C. L. Bethel, R. Murphy, L. Dole, and C. Nass, “Responses to robot social roles and social role framing,” in2011 International Conference on Collaboration Technologies and Systems (CTS), pp. 194–203, IEEE, 2011
work page 2011
-
[30]
Social robots on a global stage: establishing a role for culture during human–robot interaction,
V . Lim, M. Rooksby, and E. S. Cross, “Social robots on a global stage: establishing a role for culture during human–robot interaction,” International Journal of Social Robotics, vol. 13, no. 6, pp. 1307–1333, 2021
work page 2021
-
[31]
J. Parviainen, L. Van Aerschot, T. Särkikoski, S. Pekkarinen, H. Melkas, and L. Hennala, “Motions with emotions?: A phenomenological ap- proach to understanding the simulated aliveness of a robot body,” Techné: Research in Philosophy and Technology, no. 3, 2019
work page 2019
-
[32]
Social robots: Things or agents?,
M. Ala ˇc, “Social robots: Things or agents?,”AI & society, vol. 31, no. 4, pp. 519–535, 2016
work page 2016
-
[33]
Touch challenge’15: Recognizing social touch gestures,
M. M. Jung, X. L. Cang, M. Poel, and K. E. MacLean, “Touch challenge’15: Recognizing social touch gestures,” inProceedings of the 2015 ACM on International Conference on Multimodal Interaction, pp. 387–390, 2015
work page 2015
-
[34]
A. Borghi, F. Caruana,et al., “Embodiment theory,” inInternational encyclopedia of the social & behavioral sciences, vol. 7, pp. 420–426, Elsevier, 2015
work page 2015
-
[35]
Touch communicates distinct emotions.,
M. J. Hertenstein, D. Keltner, B. App, B. A. Bulleit, and A. R. Jaskolka, “Touch communicates distinct emotions.,”Emotion, vol. 6, no. 3, p. 528, 2006
work page 2006
-
[36]
More than one kind: Different sensory signatures and functions divide affectionate touch.,
A. Schirmer, M. H. Chiu, and I. Croy, “More than one kind: Different sensory signatures and functions divide affectionate touch.,”Emotion, vol. 21, no. 6, p. 1268, 2021
work page 2021
-
[37]
Affective touch in human–robot interaction: conveying emotion to the nao robot,
R. Andreasson, B. Alenljung, E. Billing, and R. Lowe, “Affective touch in human–robot interaction: conveying emotion to the nao robot,” International Journal of Social Robotics, vol. 10, no. 4, pp. 473–491, 2018. 15
work page 2018
-
[38]
Interpersonal distance, body orientation, and touch: Effects of culture, gender, and age,
M. S. Remland, T. S. Jones, and H. Brinkman, “Interpersonal distance, body orientation, and touch: Effects of culture, gender, and age,”The Journal of social psychology, vol. 135, no. 3, pp. 281–297, 1995
work page 1995
-
[39]
Affective interpersonal touch in close relationships: A cross-cultural perspective,
A. Sorokowska, S. Saluja, P. Sorokowski, T. Fr ˛ ackowiak, M. Karwowski, T. Aavik, G. Akello, C. Alm, N. Amjad, A. Anjum,et al., “Affective interpersonal touch in close relationships: A cross-cultural perspective,” Personality and Social Psychology Bulletin, vol. 47, no. 12, pp. 1705– 1721, 2021
work page 2021
-
[40]
C. J. Willemse, A. Toet, and J. B. Van Erp, “Affective and behav- ioral responses to robot-initiated social touch: toward understanding the opportunities and limitations of physical contact in human–robot interaction,”Frontiers in ICT, vol. 4, p. 12, 2017
work page 2017
-
[41]
Affective interaction and affective computing-past, present and future,
N. Ahmadpour, D. Lottridge, J. Fritsch, C. Sas, M. E. Cecchinato, D. Harrison, K. Höök, P. S. Foong, K. Ijaz, P. Gough,et al., “Affective interaction and affective computing-past, present and future,” inPro- ceedings of the Extended Abstracts of the CHI Conference on Human Factors in Computing Systems, pp. 1–6, 2025
work page 2025
-
[42]
J. J. Gamboa-Montero, S. Carrasco-Martinez, E. Fernandez-Rodicio, F. Alonso-Martin, and J. C. Castillo, “Evaluating the effects of active social touch and robot expressiveness on user attitudes and behaviour in human–robot interaction,”Scientific Reports, vol. 15, no. 1, p. 18483, 2025
work page 2025
-
[43]
Emotion recognition using affective touch: A survey,
E. Y . Zhang, Z. Pan, and A. D. Cheok, “Emotion recognition using affective touch: A survey,”IEEE Transactions on Affective Computing, 2025
work page 2025
-
[44]
Y . Pang, X. Xu, S. Chen, Y . Fang, X. Shi, Y . Deng, Z.-L. Wang, and C. Cao, “Skin-inspired textile-based tactile sensors enable multifunc- tional sensing of wearables and soft robots,”Nano Energy, vol. 96, p. 107137, 2022
work page 2022
-
[45]
Touching the sound: audible features enable haptics for robot control,
H. Shi, M. Russo, J. de la Torre, A. Mohammad, X. Dong, and D. Axinte, “Touching the sound: audible features enable haptics for robot control,” IEEE Robotics & Automation Magazine, vol. 30, no. 3, pp. 56–68, 2022
work page 2022
-
[46]
Topography of social touching depends on emotional bonds between humans,
J. T. Suvilehto, E. Glerean, R. I. Dunbar, R. Hari, and L. Nummenmaa, “Topography of social touching depends on emotional bonds between humans,”Proceedings of the National Academy of Sciences, vol. 112, no. 45, pp. 13811–13816, 2015
work page 2015
-
[47]
K. Maj, P. Grzybowicz, W. L. Drela, and M. Olszanowski, “Touching a mechanical body: The role of anthropomorphic framing in physiological arousal when touching a robot,”Sensors, vol. 23, no. 13, p. 5954, 2023
work page 2023
-
[48]
Feel-good robotics: requirements on touch for embodiment in assistive robotics,
P. Beckerle, R. Kõiva, E. A. Kirchner, R. Bekrater-Bodmann, S. Dosen, O. Christ, D. A. Abbink, C. Castellini, and B. Lenggenhager, “Feel-good robotics: requirements on touch for embodiment in assistive robotics,” Frontiers in neurorobotics, vol. 12, p. 84, 2018
work page 2018
-
[49]
Automatic kinematic chain calibration using artificial skin: self-touch in the icub humanoid robot,
A. Roncone, M. Hoffmann, U. Pattacini, and G. Metta, “Automatic kinematic chain calibration using artificial skin: self-touch in the icub humanoid robot,” in2014 IEEE International Conference on Robotics and Automation (ICRA), pp. 2305–2312, IEEE, 2014
work page 2014
-
[50]
A. Roncone, M. Hoffmann, U. Pattacini, L. Fadiga, and G. Metta, “Peripersonal space and margin of safety around the body: learning visuo-tactile associations in a humanoid robot with artificial skin,”PloS one, vol. 11, no. 10, p. e0163713, 2016
work page 2016
-
[51]
The role of social norms in human–robot interaction: A systematic review,
S. Lawrence, M. Jouaiti, J. Hoey, C. L. Nehaniv, and K. Dautenhahn, “The role of social norms in human–robot interaction: A systematic review,”ACM Transactions on Human-Robot Interaction, vol. 14, no. 3, pp. 1–44, 2025
work page 2025
-
[52]
Human response to humanoid robot that responds to social touch,
M. Okuda, Y . Takahashi, and S. Tsuichihara, “Human response to humanoid robot that responds to social touch,”Applied Sciences, vol. 12, no. 18, p. 9193, 2022
work page 2022
-
[53]
Touch and tell: Multimodal decoding of human emotions and social gestures for robots,
Q. Ren, R. Proesmans, Y . Hou, T. Belpaeme,et al., “Touch and tell: Multimodal decoding of human emotions and social gestures for robots,” arXiv preprint arXiv:2412.03300, 2024
-
[54]
What are emotions? and how can they be measured?,
K. R. Scherer, “What are emotions? and how can they be measured?,” Social science information, vol. 44, no. 4, pp. 695–729, 2005
work page 2005
-
[55]
S. C. Hauser, S. McIntyre, A. Israr, H. Olausson, and G. J. Gerling, “Uncovering human-to-human physical interactions that underlie emo- tional and affective touch communication,” in2019 IEEE world haptics conference (WHC), pp. 407–412, IEEE, 2019
work page 2019
-
[56]
Dimensions of mind perception,
H. M. Gray, K. Gray, and D. M. Wegner, “Dimensions of mind perception,”science, vol. 315, no. 5812, pp. 619–619, 2007
work page 2007
-
[57]
Universal dimensions of social cognition: Warmth and competence,
S. T. Fiske, A. J. Cuddy, and P. Glick, “Universal dimensions of social cognition: Warmth and competence,”Trends in cognitive sciences, vol. 11, no. 2, pp. 77–83, 2007
work page 2007
-
[58]
Social categorization of social robots: Anthropomorphism as a function of robot group membership,
F. Eyssel and D. Kuchenbrandt, “Social categorization of social robots: Anthropomorphism as a function of robot group membership,”British Journal of Social Psychology, vol. 51, no. 4, pp. 724–731, 2012
work page 2012
-
[59]
Inclusion of other in the self scale and the structure of interpersonal closeness.,
A. Aron, E. N. Aron, and D. Smollan, “Inclusion of other in the self scale and the structure of interpersonal closeness.,”Journal of personality and social psychology, vol. 63, no. 4, p. 596, 1992
work page 1992
-
[60]
D. F. Alwin,Margins of error: A study of reliability in survey measure- ment. John Wiley & Sons, 2007
work page 2007
-
[61]
Coefficient alpha and the internal structure of tests,
L. J. Cronbach, “Coefficient alpha and the internal structure of tests,” psychometrika, vol. 16, no. 3, pp. 297–334, 1951
work page 1951
-
[62]
The sense of agency in perception, behaviour and human–machine interactions,
W. Wen and H. Imamizu, “The sense of agency in perception, behaviour and human–machine interactions,”Nature Reviews Psychology, vol. 1, no. 4, pp. 211–222, 2022
work page 2022
-
[63]
Social touch gesture recognition using convolutional neural network,
S. Albawi, O. Bayat, S. Al-Azawi, and O. N. Ucan, “Social touch gesture recognition using convolutional neural network,”Computational Intelligence and Neuroscience, vol. 2018, no. 1, p. 6973103, 2018
work page 2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.