A Five-Layer MLOps Architecture for Connected Automated Driving
Pith reviewed 2026-05-14 19:50 UTC · model grok-4.3
The pith
A five-layer MLOps architecture lets automated driving fleets learn collectively from shared data to handle rare scenarios.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
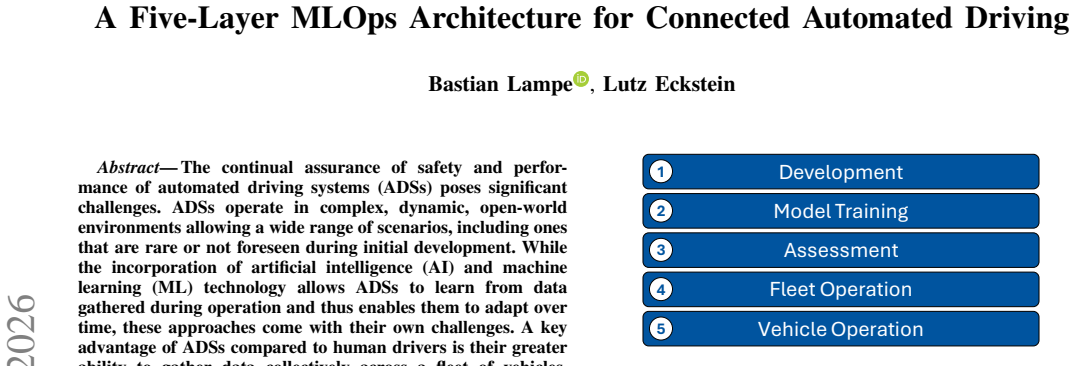
The paper presents a five-layer architecture for collective learning-enabled MLOps processes for ADSs. The goal of this architecture is to provide a conceptual blueprint for the design and implementation of MLOps processes by fleet operators and other relevant stakeholders. The paper describes the main responsibilities of each layer, their interactions, and how multi-level self-assessments enabled by the architecture can support the detection and reduction of edge cases including black swan events.
What carries the argument
The five-layer MLOps architecture whose layers coordinate data collection, model training, deployment, monitoring, and collective feedback across vehicle fleets.
Load-bearing premise
Collective data sharing across fleets will identify learning opportunities missed by individual vehicles.
What would settle it
An experiment in which a single-vehicle learning system detects and resolves the same set of edge cases as a fleet-wide system at comparable cost and latency.
Figures





read the original abstract
The continual assurance of safety and performance of automated driving systems (ADSs) poses significant challenges. ADSs operate in complex, dynamic, open-world environments allowing a wide range of scenarios, including ones that are rare or not foreseen during initial development. While the incorporation of artificial intelligence (AI) and machine learning (ML) technology allows ADSs to learn from data gathered during operation and thus enables them to adapt over time, these approaches come with their own challenges. A key advantage of ADSs compared to human drivers is their greater ability to gather data collectively across a fleet of vehicles, or even across multiple fleets operated by different entities, and to learn from this data collectively. Vehicles can share and combine their data to identify additional learning opportunities otherwise missed by individual vehicles. This creates new opportunities to tackle the challenges of continual assurance of safety and performance, but requires the implementation of architectures that leverage the collective learning potential. Based on established MLOps principles and existing work in the field of connected automated driving, this paper presents a five-layer architecture for collective learning-enabled MLOps processes for ADSs. The goal of this architecture is to provide a conceptual blueprint for the design and implementation of MLOps processes by fleet operators and other relevant stakeholders. The paper describes the main responsibilities of each layer, their interactions, and how multi-level self-assessments enabled by the architecture can support the detection and reduction of edge cases including black swan events.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a five-layer MLOps architecture for collective learning-enabled processes in automated driving systems (ADSs). It describes the main responsibilities of each layer, their interactions, and how multi-level self-assessments enabled by the architecture can support the detection and reduction of edge cases including black swan events, based on collective data sharing across fleets. The goal is to provide a conceptual blueprint for fleet operators and stakeholders.
Significance. If the described architecture proves implementable, it would offer a structured framework for leveraging fleet-wide data to improve continual safety assurance in open-world ADS environments. The work builds directly on established MLOps principles and prior connected automated driving research, providing a high-level blueprint that could guide practical design without introducing new formal derivations or empirical results.
minor comments (2)
- The description of layer interactions and multi-level self-assessments would be strengthened by a diagram or table summarizing data flows and assessment triggers between layers.
- The paper would benefit from one or two concrete (even hypothetical) examples of how collective data sharing surfaces a specific edge case missed by individual vehicles.
Simulated Author's Rebuttal
We thank the referee for the positive review and recommendation for minor revision. We appreciate the recognition that the five-layer architecture offers a structured conceptual blueprint for collective learning in ADSs, building on established MLOps principles without claiming new formal results or empirical validation.
Circularity Check
Conceptual architecture proposal with no derivational circularity
full rationale
The paper is a forward-looking conceptual blueprint that describes a five-layer MLOps architecture, layer responsibilities, interactions, and multi-level self-assessments for collective learning in ADS fleets. No equations, fitted parameters, quantitative predictions, or formal derivations appear in the text. The central claim is satisfied simply by providing the description, and the motivating assumption about fleet-wide data sharing is presented as an opportunity rather than a result derived from the architecture itself. No self-citations function as load-bearing premises, and the work does not reduce any claimed outcome to its own inputs by construction.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Vehicles can share and combine data across fleets to identify learning opportunities missed by individual vehicles
- domain assumption Multi-level self-assessments enabled by the architecture can detect and reduce edge cases including black swan events
invented entities (1)
-
Five-layer MLOps architecture
no independent evidence
Reference graph
Works this paper leans on
-
[1]
ISO - International Organization for Standardization,ISO/IEC/IEEE 32675 (Information technology — DevOps — Building reliable and secure systems including application build, package and deployment), Std., 2022
work page 2022
-
[2]
Hidden technical debt in machine learning systems,
D. Sculley, G. Holt, D. Golovin, E. Davydov, T. Phillips, D. Ebner, V . Chaudhary, M. Young, J.-F. Crespo, and D. Dennison, “Hidden technical debt in machine learning systems,” inAdvances in Neural Information Processing Systems, vol. 28. Curran Associates, Inc., 2015
work page 2015
-
[3]
Machine learning operations (mlops): Overview, definition, and architecture,
D. Kreuzberger, N. K ¨uhl, and S. Hirschl, “Machine learning operations (mlops): Overview, definition, and architecture,”IEEE Access, vol. 11, pp. 31 866–31 879, 2023
work page 2023
-
[4]
Regulation (EU) 2024/1689 (Artificial Intelligence Act),
European Parliament, Council of the European Union, “Regulation (EU) 2024/1689 (Artificial Intelligence Act),” Official Journal of the European Union, L series, 2024/1689, 12.7.2024, 2024. [Online]. Available: http://data.europa.eu/eli/reg/2024/1689/oj
work page 2024
-
[5]
——, “Regulation (EU) 2018/858,” Official Journal of the European Union, L series, 2018/858, 14.6.2018, 2018. [Online]. Available: http://data.europa.eu/eli/reg/2018/858/2024-07-01
work page 2018
-
[6]
——, “Regulation (EU) 2019/2144,” Official Journal of the European Union, L series, 2019/2144, 16.12.2019, 2019. [Online]. Available: https://eur-lex.europa.eu/eli/reg/2019/2144/oj
work page 2019
-
[7]
European Commission, Directorate-General for Internal Market, Industry, Entrepreneurship and SMEs, “Regulation (EU) 2022/1426,” Official Journal of the European Union L 325/1, 2022. [Online]. Available: http://data.europa.eu/eli/reg impl/2022/1426/oj
work page 2022
-
[8]
ISO - International Organization for Standardization,ISO 26262 (Road vehicles – Functional safety), Std., 2018
work page 2018
-
[9]
——,ISO 21448 (Road vehicles — Safety of the intended functional- ity), Std., 2022
work page 2022
-
[10]
——,ISO/TS 5083 (Road vehicles — Safety for automated driving systems — Design, verification and validation), Std., 2025
work page 2025
-
[11]
——,ISO/PAS 8800 (Road vehicles — Safety and artificial intelli- gence), Std., 2024
work page 2024
-
[12]
Underwriters Laboratories,Standard for Safety — Evaluation of Au- tonomous Products, Underwriters Laboratories Std., Mar. 2023
work page 2023
-
[13]
Working Party on Automated/Autonomous and Connected Vehicles, “New Assessment/Test Method for Automated Driving (NATM) Guidelines for Validating Automated Driving System (ADS),” June 2023
work page 2023
-
[14]
Proposal for a new United Nations Global Technical Regulation on Automated Driving Systems (ADS),
Informal Working Group on Automated Driving Systems, “Proposal for a new United Nations Global Technical Regulation on Automated Driving Systems (ADS),” November 2025
work page 2025
-
[15]
Continuous Learning Approach to Safety Engineering,
R. Johansson and P. Koopman, “Continuous Learning Approach to Safety Engineering,” inCARS - Critical Automotive applications: Robustness & Safety, Zaragoza, Spain, Sep. 2022. [Online]. Available: https://hal.science/hal-03782627
work page 2022
-
[16]
Expand- ing the classical v-model for the development of complex systems incorporating ai,
L. Ullrich, M. Buchholz, K. Dietmayer, and K. Graichen, “Expand- ing the classical v-model for the development of complex systems incorporating ai,”IEEE Transactions on Intelligent Vehicles, 2024
work page 2024
-
[17]
The open autonomy safety case frame- work,
M. Wagner and C. Carlan, “The open autonomy safety case frame- work,” 2024
work page 2024
-
[18]
Pegasus vvm - final quality criteria and final methodology,
P. V . Consortium, “Pegasus vvm - final quality criteria and final methodology,” Jul. 2025
work page 2025
-
[19]
Mcity data engine: Iterative model improvement through open-vocabulary data selection,
D. Bogdoll, R. P. Ananta, A. Giridharan, I. Moore, G. Stevens, and H. X. Liu, “Mcity data engine: Iterative model improvement through open-vocabulary data selection,” 2025
work page 2025
-
[20]
Waymo’s safety methodologies and safety readiness determinations,
N. Webb, D. Smith, C. Ludwick, T. Victor, Q. Hommes, F. Favaro, G. Ivanov, and T. Daniel, “Waymo’s safety methodologies and safety readiness determinations,” 2020
work page 2020
-
[21]
F. Favaro, L. Fraade-Blanar, S. Schnelle, T. Victor, M. Pe ˜na, J. En- gstrom, J. Scanlon, K. Kusano, and D. Smith, “Building a credible case for safety: Waymo’s approach for the determination of absence of unreasonable risk,” 2023
work page 2023
-
[22]
A safety architecture for self-driving systems,
S. Shalev-Shwartz, M. Molnar, I. Granot, A. Shany, and A. Shashua, “A safety architecture for self-driving systems,” Mobileye, Tech. Rep., 2024. [Online]. Available: https://static.mobileye.com/website/ us/corporate/files/SDS Safety Architecture.pdf
work page 2024
-
[24]
Mlops: Continuous delivery and automation pipelines in machine learning,
Google, “Mlops: Continuous delivery and automation pipelines in machine learning,” 2024, [Accessed 16-02-2026]. [Online]. Available: https://cloud.google.com/architecture/mlops-continuous-delivery-and- automation-pipelines-in-machine-learning
work page 2024
-
[25]
MLOps, “Mlops principles,” 2024, [Accessed 16-02-2026]. [Online]. Available: https://ml-ops.org/content/mlops-principles
work page 2024
-
[26]
A. Grici ¯unas, “Swirlai newsletters,” 2025, accessed: 16-02-2026. [Online]. Available: https://www.newsletter.swirlai.com/
work page 2025
-
[27]
Safe halt as fail-safe concept for automated driv- ing systems,
S. M. Ackermann, “Safe halt as fail-safe concept for automated driv- ing systems,” Ph.D. dissertation, Technische Universit ¨at Darmstadt, Darmstadt, 2023
work page 2023
-
[28]
IEC - International Electrotechnical Commission,IEC 61508 (Func- tional safety of electrical/electronic/programmable electronic safety- related systems), Std., 2010
work page 2010
-
[29]
Assessing a safety case: Bottom-up guidance for claims and evidence evaluation,
S. Schnelle, F. Favaro, L. Fraade-Blanar, D. Wichner, H. Broce, and J. Miranda, “Assessing a safety case: Bottom-up guidance for claims and evidence evaluation,” 2025
work page 2025
-
[30]
Introducing oasiss : Odd-based ai safety in autonomous systems,
J. Jeyachandran, S. Khastgir, X. Zhao, E. Barbier, and P. A. Jennings, “Introducing oasiss : Odd-based ai safety in autonomous systems,” inThe IEEE International Conference on Intelligent Transportation Systems (ITSC), 2025
work page 2025
-
[31]
F. Favaro, S. Schnelle, L. Fraade-Blanar, T. Victor, M. Pe ˜na, N. Webb, H. Broce, C. Paterson, and D. Smith, “Determining absence of unrea- sonable risk: Approval guidelines for an automated driving system deployment,” 2025
work page 2025
-
[32]
Adaptive replay-to-sim approach for developing and testing automated driving systems in urban areas,
N. Weber, “Adaptive replay-to-sim approach for developing and testing automated driving systems in urban areas,” Ph.D. dissertation, Tech- nische Universit¨at Darmstadt, Darmstadt, Juni 2025
work page 2025
-
[33]
Deliverable d13: Scenario-based model of the odd through scenario databases,
C. Glasmacher, M. Schuldes, P. Topalakatti, P. Hristov, H. Weber, and L. Eckstein, “Deliverable d13: Scenario-based model of the odd through scenario databases,” VVM Project, Tech. Rep., 2023
work page 2023
-
[34]
Towards continuous safety assurance for autonomous systems,
P. Schleiss, F. Carella, and I. Kurzidem, “Towards continuous safety assurance for autonomous systems,” in2022 6th International Con- ference on System Reliability and Safety (ICSRS), 2022, pp. 457–462
work page 2022
-
[35]
Addressing uncertainty in the safety assurance of machine-learning,
S. Burton and B. Herd, “Addressing uncertainty in the safety assurance of machine-learning,”Frontiers in Computer Science, vol. 5, 2023. [Online]. Available: https://www.frontiersin.org/journals/computer- science/articles/10.3389/fcomp.2023.1132580
-
[36]
Towards an argument pattern for the use of safety performance indicators,
D. Ratiu, T. Rohlinger, T. Stolte, and S. Wagner, “Towards an argument pattern for the use of safety performance indicators,” inCom- puter Safety, Reliability, and Security. SAFECOMP 2024 Workshops, A. Ceccarelli, M. Trapp, A. Bondavalli, E. Schoitsch, B. Gallina, and F. Bitsch, Eds. Springer Nature Switzerland, 2024, pp. 160–172
work page 2024
-
[37]
R. v. Kempen, L. Adrian Heidrich, B. Lampe, T. Woopen, and L. Eck- stein, “Combined registration and fusion of evidential occupancy grid maps for live digital twins of traffic,” in2023 IEEE Intelligent Vehicles Symposium (IV), 2023
work page 2023
-
[38]
Toward transportation digital twin systems for traffic safety and mobility: A review,
M. S. Irfan, S. Dasgupta, and M. Rahman, “Toward transportation digital twin systems for traffic safety and mobility: A review,”IEEE Internet of Things Journal, vol. 11, no. 14, pp. 24 581–24 603, 2024
work page 2024
-
[39]
Intelligent transportation systems using roadside infrastructure: A literature survey,
C. Creß, Z. Bing, and A. C. Knoll, “Intelligent transportation systems using roadside infrastructure: A literature survey,”IEEE Transactions on Intelligent Transportation Systems, vol. 25, no. 7, pp. 6309–6327, 2024
work page 2024
-
[40]
Control center framework for teleoperation support of automated vehicles on public roads,
M.-M. Wolf, N. Krauss, A. Schmidt, and F. Diermeyer, “Control center framework for teleoperation support of automated vehicles on public roads,” in2025 IEEE Intelligent Vehicles Symposium (IV), 2025
work page 2025
-
[41]
Robotkube: Orchestrating large-scale cooperative multi- robot systems with kubernetes and ros,
B. Lampe, L. Reiher, L. Zanger, T. Woopen, R. van Kempen, and L. Eckstein, “Robotkube: Orchestrating large-scale cooperative multi- robot systems with kubernetes and ros,” in2023 IEEE 26th Interna- tional Conference on Intelligent Transportation Systems (ITSC), 2023, pp. 2719–2725
work page 2023
-
[42]
Application management in c-its: Orchestrating demand-driven deployments and reconfigurations,
L. Zanger, B. Lampe, L. Reiher, and L. Eckstein, “Application management in c-its: Orchestrating demand-driven deployments and reconfigurations,” 2025
work page 2025
-
[43]
Event detection in c-its: Classification, use cases, and reference implementation,
L. Reiher, B. Lampe, L. Zanger, and L. Eckstein, “Event detection in c-its: Classification, use cases, and reference implementation,” Mar
-
[44]
Available: https://doi.org/10.5281/zenodo.17141343
[Online]. Available: https://doi.org/10.5281/zenodo.17141343
-
[45]
Automotive a/b testing: Challenges and lessons learned from practice,
D. I. Mattos, J. Bosch, H. H. Olsson, A. Maryam Korshani, and J. Lantz, “Automotive a/b testing: Challenges and lessons learned from practice,” in2020 46th Euromicro Conference on Software Engineering and Advanced Applications (SEAA), 2020, pp. 101–109
work page 2020
-
[46]
A dynamic service-oriented software architecture for the automotive domain,
A. Kampmann, “A dynamic service-oriented software architecture for the automotive domain,” Dissertation, RWTH Aachen University, Aachen, 2023
work page 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.