Curriculum-Guided Heterogeneous Multi-Agent Intelligence for Multi-UAV Cooperative ISAC
Pith reviewed 2026-05-25 06:30 UTC · model grok-4.3
The pith
A curriculum-guided multi-agent learning method lets multiple UAVs and a ground station jointly sense targets and maintain communication links.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
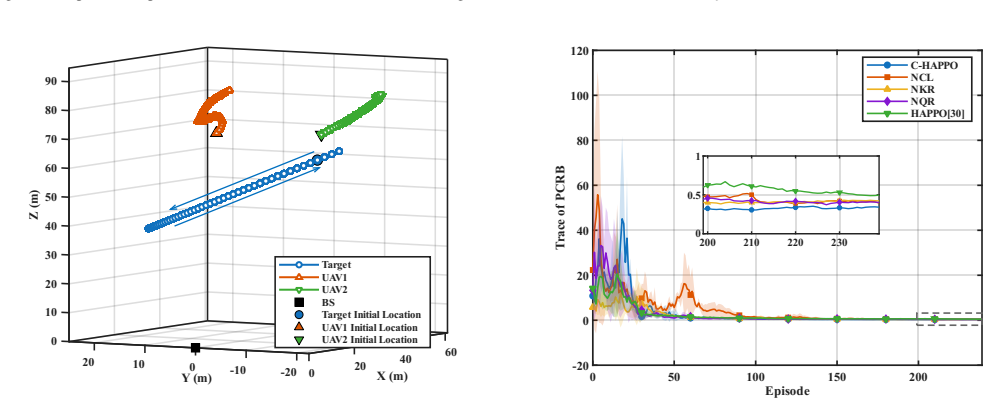
The curriculum-based heterogeneous-agent proximal policy optimization algorithm solves the posterior Cramer-Rao bound minimization problem for multi-UAV ISAC under communication constraints, producing more than 30 percent gains in sensing performance and higher tracking accuracy than existing baselines.
What carries the argument
The C-HAPPO algorithm, which uses curriculum learning to refine policies progressively and Kronecker/QR decomposition to reduce action dimensionality in heterogeneous multi-agent settings.
If this is right
- Multi-UAV ISAC systems can maintain required communication rates while achieving higher sensing accuracy through coordinated trajectory and beamforming decisions.
- Curriculum learning allows heterogeneous agents to reach stable policies faster when the number of UAVs increases.
- The same decomposition techniques reduce computational cost enough to support real-time execution on embedded UAV processors.
Where Pith is reading between the lines
- The same progressive-training structure could be tested on other multi-agent tasks such as coordinated search-and-rescue or distributed spectrum monitoring.
- If the communication constraints are tightened further, the method may need an additional safety layer to guarantee link reliability during early training episodes.
Load-bearing premise
That minimizing the posterior Cramer-Rao bound under communication constraints in simulation produces performance that remains useful once the same algorithm runs on real UAV hardware and radio channels.
What would settle it
A hardware experiment with actual UAVs, measured radar returns, and live communication links in which the proposed method fails to show at least 30 percent sensing improvement over the same baselines.
Figures









read the original abstract
Seamlessly unifying communication and sensing, sixth-generation (6G) networks are poised to transform into intelligent platforms with high spectral-energy efficiency and real-time environmental awareness. In the low-altitude economy, unmanned aerial vehicles (UAVs) enable air-ground integrated sensing and communication (ISAC) for applications such as logistics and inspection, yet most studies focus on single-UAV or homogeneous-agent designs. In contrast, this paper proposes a multi-UAV cooperative ISAC system that enables heterogeneous-agent collaboration between multiple UAVs and a ground base station (BS) for joint target sensing, tracking, and communication. The system is formulated as a posterior Cramer-Rao bound (PCRB) minimization problem under communication performance constraints, utilizing joint trajectory-beamforming optimization. To tackle the NP-hard nature of this problem, we design a curriculum-based heterogeneous-agent proximal policy optimization (C-HAPPO) algorithm, where curriculum learning guides progressive policy refinement and Kronecker/QR decomposition mitigates action dimensionality. Simulation results show that the proposed approach achieves more than a 30% improvement in sensing performance, faster convergence, and higher tracking accuracy than existing baselines, demonstrating its scalability and effectiveness for complex multi-UAV ISAC scenarios.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a multi-UAV cooperative ISAC system with heterogeneous agents (UAVs and ground BS) for joint target sensing, tracking, and communication. It formulates the problem as posterior Cramér-Rao bound (PCRB) minimization under communication constraints via joint trajectory-beamforming optimization and solves it with a curriculum-based heterogeneous-agent proximal policy optimization (C-HAPPO) algorithm that incorporates curriculum learning and Kronecker/QR decomposition. Simulations are reported to yield >30% sensing improvement, faster convergence, and higher tracking accuracy versus baselines.
Significance. If the simulation results hold under rigorous verification, the work would provide a concrete demonstration of curriculum-guided multi-agent RL for scalable multi-UAV ISAC, addressing a gap between single-UAV/homogeneous designs and heterogeneous cooperation. The use of PCRB as the optimization objective is a standard choice in the field, but the absence of supporting experimental details limits the ability to judge whether the claimed gains advance practical ISAC performance.
major comments (2)
- [Abstract] Abstract (paragraph on system formulation and algorithm design): The headline claim of >30% sensing improvement rests on PCRB minimization, yet the manuscript provides no verification that realized estimation error (e.g., from an EKF or particle filter) attains or tracks the reported PCRB reduction. Because PCRB is only a lower bound, any gap between the bound and empirical MSE would directly weaken the practical significance of the performance numbers.
- [Abstract] Abstract (simulation results paragraph): No error bars, baseline implementation details, dataset descriptions, or statistical tests are supplied for the reported >30% improvement, faster convergence, and higher tracking accuracy. Without these, the central empirical claim cannot be assessed for reproducibility or statistical reliability.
minor comments (1)
- [Abstract] Abstract: The description of Kronecker/QR decomposition for action dimensionality reduction is mentioned but not connected to the specific steps inside the C-HAPPO policy update or the curriculum schedule.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address the two major comments point by point below, indicating planned revisions where appropriate.
read point-by-point responses
-
Referee: [Abstract] Abstract (paragraph on system formulation and algorithm design): The headline claim of >30% sensing improvement rests on PCRB minimization, yet the manuscript provides no verification that realized estimation error (e.g., from an EKF or particle filter) attains or tracks the reported PCRB reduction. Because PCRB is only a lower bound, any gap between the bound and empirical MSE would directly weaken the practical significance of the performance numbers.
Authors: We agree that PCRB is a lower bound and that explicit comparison to realized MSE from an estimator such as EKF would provide stronger practical validation. In the ISAC literature, however, direct optimization and reporting of PCRB is standard because it yields a tractable, estimator-independent metric that lower-bounds achievable performance. Our simulations therefore quantify improvement in this bound under the stated constraints. In revision we will add an explicit statement in the abstract and simulation section clarifying that all reported sensing gains refer to PCRB reduction, together with a short discussion (with citations) of why PCRB minimization is the conventional objective in comparable trajectory-beamforming studies. revision: partial
-
Referee: [Abstract] Abstract (simulation results paragraph): No error bars, baseline implementation details, dataset descriptions, or statistical tests are supplied for the reported >30% improvement, faster convergence, and higher tracking accuracy. Without these, the central empirical claim cannot be assessed for reproducibility or statistical reliability.
Authors: We accept this criticism. The current manuscript reports mean performance but omits variability measures and expanded implementation details. In the revised version we will (i) add error bars (standard deviation across independent random seeds) to all figures, (ii) expand the simulation-setup subsection with full hyper-parameter tables for both our algorithm and the baselines, (iii) provide a complete description of the custom simulation environment (no external public dataset is used), and (iv) include results of paired statistical tests or confidence intervals to support the significance of the reported gains. revision: yes
Circularity Check
No significant circularity detected
full rationale
The provided abstract formulates the multi-UAV ISAC task as a PCRB minimization problem solved by the C-HAPPO algorithm and reports comparative simulation outcomes (e.g., >30% sensing improvement). No equations, derivation steps, or self-citations are shown that would allow identification of self-definitional reductions, fitted inputs renamed as predictions, or load-bearing self-citation chains. The performance numbers are presented as empirical results of running the proposed optimizer against baselines on the stated objective; this is a standard simulation comparison and does not reduce the claimed result to its inputs by construction. The derivation chain is therefore treated as self-contained.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
On the road to 6G: Visions, requirements, key technologies, and testbeds,
C.-X. Wang, X. You, X. Gao, X. Zhu, Z. Li, C. Zhang, H. Wang, Y . Huang, Y . Chen, H. Haaset al., “On the road to 6G: Visions, requirements, key technologies, and testbeds,”IEEE Communications Surveys & Tutorials, vol. 25, no. 2, pp. 905–974, 2023
work page 2023
-
[2]
Op- erator’s perspective on 6G: 6G services, vision, and spectrum,
M. Na, J. Lee, G. Choi, T. Yu, J. Choi, J. Lee, and S. Bahk, “Op- erator’s perspective on 6G: 6G services, vision, and spectrum,”IEEE Communications Magazine, vol. 62, no. 8, pp. 178–184, 2024
work page 2024
-
[3]
ISAC– a survey on its layered architecture, technologies, standardizations, prototypes and testbeds,
X. Luo, Q. Lin, R. Zhang, H.-H. Chen, X. Wang, and M. Huang, “ISAC– a survey on its layered architecture, technologies, standardizations, prototypes and testbeds,”IEEE Communications Surveys & Tutorials, 2025
work page 2025
-
[4]
C. Luo, L. Xiang, J. Hu, and K. Yang, “Bedrock models in com- munication and sensing: Advancing generalization, transferability, and performance,”arXiv preprint arXiv:2503.08220, 2025
-
[5]
Simac: A semantic-driven integrated multimodal sensing and communication framework,
Y . Peng, L. Xiang, K. Yang, F. Jiang, K. Wang, and D. O. Wu, “Simac: A semantic-driven integrated multimodal sensing and communication framework,”IEEE Journal on Selected Areas in Communications, pp. 1–1, 2025
work page 2025
-
[6]
Extended target adaptive beamforming for isac: A perspective of pre- dictive error ellipse,
S. Zhou, L. Xiang, Y . Wang, K. Yang, K. K. Wong, and C.-B. Chae, “Extended target adaptive beamforming for isac: A perspective of pre- dictive error ellipse,”IEEE Transactions on Wireless Communications, vol. 25, pp. 10 604–10 617, 2026
work page 2026
-
[7]
A. Kaushik, R. Singh, S. Dayarathna, R. Senanayake, M. Di Renzo, M. Dajer, H. Ji, Y . Kim, V . Sciancalepore, A. Zapponeet al., “Toward integrated sensing and communications for 6G: Key enabling technolo- gies, standardization, and challenges,”IEEE Communications Standards Magazine, vol. 8, no. 2, pp. 52–59, 2024
work page 2024
-
[8]
Y . Wang, G. Sun, Z. Sun, J. Wang, J. Li, C. Zhao, J. Wu, S. Liang, M. Yin, P. Wanget al., “Toward realization of low-altitude economy networks: Core architecture, integrated technologies, and future direc- tions,”arXiv preprint arXiv:2504.21583, 2025
-
[9]
State-of-the-art and future research challenges in UA V swarms,
S. Javed, A. Hassan, R. Ahmad, W. Ahmed, R. Ahmed, A. Saadat, and M. Guizani, “State-of-the-art and future research challenges in UA V swarms,”IEEE Internet of Things Journal, vol. 11, no. 11, pp. 19 023– 19 045, 2024
work page 2024
-
[10]
Integrated sensing and communication for low altitude econ- omy: Opportunities and challenges,
Y . Jiang, X. Li, G. Zhu, H. Li, J. Deng, K. Han, C. Shen, Q. Shi, and R. Zhang, “Integrated sensing and communication for low altitude econ- omy: Opportunities and challenges,”IEEE Communications Magazine, 2025
work page 2025
-
[11]
An overview of cellular ISAC for low-altitude UA V: New opportunities and challenges,
Y . Song, Y . Zeng, Y . Yang, Z. Ren, G. Cheng, X. Xu, J. Xu, S. Jin, and R. Zhang, “An overview of cellular ISAC for low-altitude UA V: New opportunities and challenges,”IEEE Communications Magazine, 2025
work page 2025
-
[12]
Joint maneuver and beamforming design for UA V-enabled integrated sensing and communication,
Z. Lyu, G. Zhu, and J. Xu, “Joint maneuver and beamforming design for UA V-enabled integrated sensing and communication,”IEEE Trans- actions on Wireless Communications, vol. 22, no. 4, pp. 2424–2440, 2022
work page 2022
-
[13]
Joint beamforming and UA V trajectory optimization for covert communications in ISAC networks,
D. Deng, W. Zhou, X. Li, D. B. Da Costa, D. W. K. Ng, and A. Nallanathan, “Joint beamforming and UA V trajectory optimization for covert communications in ISAC networks,”IEEE Transactions on Wireless Communications, 2024
work page 2024
-
[14]
Throughput maximization for UA V-enabled integrated periodic sensing and com- munication,
K. Meng, Q. Wu, S. Ma, W. Chen, K. Wang, and J. Li, “Throughput maximization for UA V-enabled integrated periodic sensing and com- munication,”IEEE Transactions on Wireless Communications, vol. 22, no. 1, pp. 671–687, 2022
work page 2022
-
[15]
ISAC from the sky: UA V trajectory design for joint communication and target localization,
X. Jing, F. Liu, C. Masouros, and Y . Zeng, “ISAC from the sky: UA V trajectory design for joint communication and target localization,”IEEE Transactions on Wireless Communications, vol. 23, no. 10, pp. 12 857– 12 872, 2024
work page 2024
-
[16]
Beamforming-based achievable rate maximization in ISAC system for multi-UA V networking,
S. Zhou, L. Xiang, K. Yang, K. K. Wong, D. O. Wu, and C.-B. Chae, “Beamforming-based achievable rate maximization in ISAC system for multi-UA V networking,”arXiv preprint arXiv:2507.21895, 2025
-
[17]
Sensing and communication in UA V cellular networks: Design and optimization,
C. Diaz-Vilor, M. A. Almasi, A. M. Abdelhady, A. Celik, A. M. Eltawil, and H. Jafarkhani, “Sensing and communication in UA V cellular networks: Design and optimization,”IEEE Transactions on Wireless Communications, vol. 23, no. 6, pp. 5456–5472, 2023
work page 2023
-
[18]
Z. Liu, X. Liu, Y . Liu, V . C. Leung, and T. S. Durrani, “UA V assisted integrated sensing and communications for internet of things: 3D trajectory optimization and resource allocation,”IEEE Transactions on Wireless Communications, vol. 23, no. 8, pp. 8654–8667, 2024
work page 2024
-
[19]
A. Khalili, A. Rezaei, D. Xu, F. Dressler, and R. Schober, “Efficient UA V hovering, resource allocation, and trajectory design for ISAC with limited backhaul capacity,”IEEE Transactions on Wireless Communica- tions, 2024
work page 2024
-
[20]
ISAC enabled cooperative detection for cellular-connected UA V network,
Y . Wang, K. Zu, L. Xiang, Q. Zhang, Z. Feng, J. Hu, and K. Yang, “ISAC enabled cooperative detection for cellular-connected UA V network,” IEEE Transactions on Wireless Communications, 2024
work page 2024
-
[21]
F. Garcia and E. Rachelson, “Markov decision processes,”Markov Decision Processes in Artificial Intelligence, pp. 1–38, 2013
work page 2013
-
[22]
Radio resource management for cellular- connected UA V: A learning approach,
Y . Li and A. H. Aghvami, “Radio resource management for cellular- connected UA V: A learning approach,”IEEE Transactions on Commu- nications, vol. 71, no. 5, pp. 2784–2800, 2023
work page 2023
-
[23]
Path planning for cellular- connected UA V: A DRL solution with quantum-inspired experience replay,
Y . Li, A. H. Aghvami, and D. Dong, “Path planning for cellular- connected UA V: A DRL solution with quantum-inspired experience replay,”IEEE Transactions on Wireless Communications, vol. 21, no. 10, pp. 7897–7912, 2022
work page 2022
-
[24]
Energy-efficient UA V-driven multi-access edge computing: a distributed many-agent perspective,
Y . Li, A. Madhukumar, T. Z. H. Ernest, G. Zheng, W. Saad, and A. H. Aghvami, “Energy-efficient UA V-driven multi-access edge computing: a distributed many-agent perspective,”IEEE Transactions on Communi- cations, 2025
work page 2025
-
[25]
MARL based UA Vs’ trajectory and beamforming optimization for ISAC system,
Q. Gao, R. Zhong, H. Shin, and Y . Liu, “MARL based UA Vs’ trajectory and beamforming optimization for ISAC system,”IEEE Internet of Things Journal, 2024
work page 2024
-
[26]
Z. Xie, Z. Wang, Z. Zhang, J. Wang, Z. Jiang, and Z. Han, “Distributed UA V swarm for device-free integrated sensing and communication relying on multi-agent reinforcement learning,”IEEE Transactions on Vehicular Technology, 2024
work page 2024
-
[27]
S. Cheng, X. Lin, X. Li, and J. Wang, “Joint UA V trajectory and radcom task schedule for IVNs: A game-embedding multi-agent deep reinforcement learning approach,”IEEE Transactions on Wireless Com- munications, 2024
work page 2024
-
[28]
Y . Qin, Z. Zhang, X. Li, W. Huangfu, and H. Zhang, “Deep reinforce- ment learning based resource allocation and trajectory planning in inte- grated sensing and communications UA V network,”IEEE Transactions on Wireless Communications, vol. 22, no. 11, pp. 8158–8169, 2023
work page 2023
-
[29]
Y . Ye, Y . Tian, C. H. Liu, L. Dong, G. Qi, and D. Wu, “AoI-aware air- ground mobile crowdsensing by multi-agent curriculum learning with collaborative observation augmentation,”IEEE Transactions on Mobile Computing, no. 01, pp. 1–13, 2025
work page 2025
-
[30]
Heterogeneous-agent reinforcement learning,
Y . Zhong, J. G. Kuba, X. Feng, S. Hu, J. Ji, and Y . Yang, “Heterogeneous-agent reinforcement learning,”Journal of Machine Learning Research, vol. 25, no. 32, pp. 1–67, 2024
work page 2024
-
[31]
B. Li and A. P. Petropulu, “Joint transmit designs for coexistence of MIMO wireless communications and sparse sensing radars in clutter,” IEEE Transactions on Aerospace and Electronic Systems, vol. 53, no. 6, pp. 2846–2864, 2017
work page 2017
-
[32]
Optimal training for residual self-interference for full-duplex one-way relays,
X. Li, C. Tepedelenlio ˘glu, and H. S ¸enol, “Optimal training for residual self-interference for full-duplex one-way relays,”IEEE Transactions on Communications, vol. 66, no. 12, pp. 5976–5989, 2018
work page 2018
-
[33]
Sensing as 14 a service in 6G perceptive networks: A unified framework for ISAC resource allocation,
F. Dong, F. Liu, Y . Cui, W. Wang, K. Han, and Z. Wang, “Sensing as 14 a service in 6G perceptive networks: A unified framework for ISAC resource allocation,”IEEE Transactions on Wireless Communications, vol. 22, no. 5, pp. 3522–3536, 2022
work page 2022
-
[34]
Radar-assisted predictive beamforming for vehicular links: Communication served by sensing,
F. Liu, W. Yuan, C. Masouros, and J. Yuan, “Radar-assisted predictive beamforming for vehicular links: Communication served by sensing,” IEEE Transactions on Wireless Communications, vol. 19, no. 11, pp. 7704–7719, 2020
work page 2020
-
[35]
Industry tip: Picking the minimum process noise variance for your NCV track filter,
W. Blair, “Industry tip: Picking the minimum process noise variance for your NCV track filter,”IEEE Aerospace and Electronic Systems Magazine, vol. 36, no. 2, pp. 72–74, 2021
work page 2021
-
[36]
High-Dimensional Continuous Control Using Generalized Advantage Estimation
J. Schulman, P. Moritz, S. Levine, M. Jordan, and P. Abbeel, “High- dimensional continuous control using generalized advantage estimation,” arXiv preprint arXiv:1506.02438, 2015
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[37]
Y . Zhu, M. Chen, S. Wang, Y . Hu, Y . Liu, and C. Yin, “Collaborative reinforcement learning based unmanned aerial vehicle (UA V) trajectory design for 3D UA V tracking,”IEEE Transactions on Mobile Computing, vol. 23, no. 12, pp. 10 787–10 802, 2024
work page 2024
-
[38]
J. Meredith, “Technical specification group radio access network: Study on enhanced LTE support for aerial vehicles,” 2015
work page 2015
-
[39]
A scheme for robust distributed sensor fusion based on average consensus,
L. Xiao, S. Boyd, and S. Lall, “A scheme for robust distributed sensor fusion based on average consensus,” inIPSN 2005. Fourth International Symposium on Information Processing in Sensor Networks, 2005.IEEE, 2005, pp. 63–70
work page 2005
-
[40]
J. H. Holland, “Genetic algorithms,”Scientific american, vol. 267, no. 1, pp. 66–73, 1992
work page 1992
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.