ContextFlow: Hierarchical Task-State Alignment for Long-Horizon Embodied Agents
Pith reviewed 2026-05-20 05:54 UTC · model grok-4.3
The pith
ContextFlow maintains coherent task frontiers in long-horizon embodied agents through explicit contracts and evidence-based scoped updates.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
ContextFlow is an inspectable alignment framework that represents stages as explicit contracts, converts runtime observations into evidence packets, and applies scoped updates including continue, refine, transfer, promote, and repair. ContextFlow keeps specialist executors responsible for local closed-loop control while making task-frontier alignment explicit and auditable. Experiments and demonstration traces on long-horizon embodied tasks illustrate how evidence-grounded scoped updates diagnose and mitigate recurring task-state failures.
What carries the argument
The scoped update mechanism driven by evidence packets, which diagnoses task-state misalignment and selects from continue, refine, transfer, promote, or repair actions to realign the task frontier.
If this is right
- Task-state misalignment emerges as the dominant failure mode once local skills are reliable.
- Explicit stage contracts enable auditable transitions between planning and execution layers.
- Evidence packets allow targeted fixes that avoid full replanning on minor inconsistencies.
- Alignment across planner, monitor, memory, and executor reduces unsupported handoffs and stage lock.
Where Pith is reading between the lines
- Similar evidence packets and updates could help software agents stay aligned when chaining many tool calls over long sessions.
- Storing the generated evidence packets would create a traceable record useful for post-deployment debugging of agent decisions.
- The contract and update rules might eventually be refined automatically from patterns in past misalignment cases.
Load-bearing premise
The assumption that task-state misalignment is the main bottleneck after local skills improve and that scoped updates based on evidence packets will reliably diagnose and mitigate it across varied long-horizon tasks.
What would settle it
Running ContextFlow on a long-horizon task where evidence packets are correctly generated yet the agent still shows repeated stage lock or context mismatch would falsify the effectiveness of the scoped updates.
Figures




read the original abstract
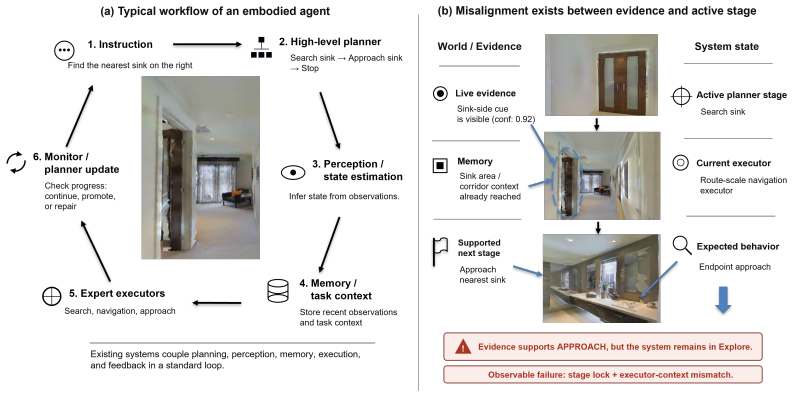
Long-horizon embodied agents increasingly delegate navigation, search, approach, and manipulation to specialist executors. As these executors become stronger, the main bottleneck shifts from local skill execution to maintaining a coherent task frontier across planning, monitoring, memory, and execution. We study task-state misalignment, a task-level consistency failure in which the planner's active stage, runtime evidence, remembered context, and delegated executor no longer justify the same next-step decision. This failure can lead to unsupported handoffs, stage lock, executor-context mismatch, and unnecessary replanning. We propose ContextFlow, an inspectable alignment framework that represents stages as explicit contracts, converts runtime observations into evidence packets, and applies scoped updates including continue, refine, transfer, promote, and repair. ContextFlow keeps specialist executors responsible for local closed-loop control while making task-frontier alignment explicit and auditable. Experiments and demonstration traces on long-horizon embodied tasks illustrate how evidence-grounded scoped updates diagnose and mitigate recurring task-state failures.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes ContextFlow, a framework for addressing task-state misalignment in long-horizon embodied agents. As specialist executors improve, the bottleneck shifts to maintaining coherence between the planner's active stage, runtime evidence, remembered context, and delegated executor. ContextFlow represents stages as explicit contracts, converts observations into evidence packets, and applies scoped updates (continue, refine, transfer, promote, repair) to diagnose and correct inconsistencies while preserving local closed-loop control by executors. The approach is illustrated via demonstration traces and experiments on long-horizon embodied tasks.
Significance. If the central claims hold, ContextFlow offers a promising, inspectable method for explicit task-frontier alignment that separates global consistency from local skill execution. This could enhance reliability and auditability in complex embodied scenarios without requiring retraining of specialist modules. The framework's emphasis on evidence packets and scoped updates provides a concrete mechanism for mitigating failures like unsupported handoffs and stage lock, representing a useful conceptual contribution to hierarchical agent design.
major comments (1)
- [Experiments] The manuscript supports the claim that scoped updates mitigate task-state misalignment primarily through illustrative demonstration traces on selected long-horizon scenarios, with no quantitative metrics, baseline comparisons, or ablations on the update rules or evidence extraction step. This is load-bearing for the central claim that task-state misalignment is the dominant bottleneck and that the alignment mechanism reliably diagnoses and corrects it across varied tasks.
minor comments (1)
- [Abstract] The abstract refers to 'experiments and demonstration traces' without naming the specific tasks, environments, or any success criteria; adding this detail would clarify the scope of the evaluation.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and for acknowledging the potential of ContextFlow as an inspectable framework for task-state alignment. We address the major comment below.
read point-by-point responses
-
Referee: [Experiments] The manuscript supports the claim that scoped updates mitigate task-state misalignment primarily through illustrative demonstration traces on selected long-horizon scenarios, with no quantitative metrics, baseline comparisons, or ablations on the update rules or evidence extraction step. This is load-bearing for the central claim that task-state misalignment is the dominant bottleneck and that the alignment mechanism reliably diagnoses and corrects it across varied tasks.
Authors: We agree that the current manuscript relies primarily on illustrative demonstration traces rather than quantitative metrics, baseline comparisons, or ablations. These traces were selected to demonstrate the inspectability of the framework by showing concrete examples of how evidence packets and scoped updates (continue, refine, transfer, promote, repair) diagnose and resolve specific failures such as unsupported handoffs and stage lock. However, we recognize that this leaves the central claims about task-state misalignment as the dominant bottleneck and the reliability of the mechanism without broader empirical support. In the revised manuscript we will add quantitative evaluation, including success rates and misalignment resolution rates across multiple long-horizon embodied tasks, baseline comparisons against standard hierarchical planners without explicit alignment, and ablations isolating the contributions of the update rules and evidence extraction step. revision: yes
Circularity Check
No circularity in framework proposal or alignment mechanism
full rationale
The manuscript defines task-state misalignment as a consistency failure across planner stage, evidence, context, and executor, then proposes ContextFlow as an explicit framework using contracts, evidence packets, and scoped updates (continue/refine/transfer/promote/repair). No equations, fitted parameters, or derivations appear that reduce any claimed result to its own inputs by construction. No self-citations are invoked as load-bearing uniqueness theorems or ansatzes. The central contribution is presented as a design choice for inspectability and auditability, supported by illustrative traces rather than any self-referential reduction. This is a standard non-circular engineering proposal.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Task-state misalignment is the primary bottleneck in long-horizon embodied agents as specialist executors become stronger.
invented entities (1)
-
ContextFlow framework
no independent evidence
Reference graph
Works this paper leans on
-
[1]
M. Ahn, A. Brohan, N. Brown, Y . Chebotar, O. Cortes, B. David, C. Finn, C. Fu, et al. Do as i can, not as i say: Grounding language in robotic affordances. InCoRL, 2022
work page 2022
-
[2]
P. Anderson, Q. Wu, D. Teney, J. Bruce, M. Johnson, N. S”underhauf, I. Reid, S. Gould, and A. van den Hengel. Vision-and-language navigation: Interpreting visually-grounded navigation instructions in real environments. InCVPR, 2018
work page 2018
- [3]
-
[4]
D. S. Chaplot, D. Gandhi, A. Gupta, and R. Salakhutdinov. Object goal navigation using goal- oriented semantic exploration. InNeurIPS, 2020
work page 2020
-
[5]
J. Chen, B. Lin, X. Liu, L. Ma, X. Liang, and K.-Y . K. Wong. Affordances-oriented planning using foundation models for continuous vision-language navigation. InAAAI, 2025
work page 2025
-
[6]
S. Chen, P.-L. Guhur, M. Tapaswi, C. Schmid, and I. Laptev. History aware multimodal trans- former for vision-and-language navigation. InNeurIPS, 2021
work page 2021
-
[7]
S. Chen, P.-L. Guhur, M. Tapaswi, C. Schmid, and I. Laptev. Think Global, Act Local: Dual- scale graph transformer for vision-and-language navigation. InCVPR, 2022
work page 2022
-
[8]
C. Cornelio and M. Diab. Recover: A neuro-symbolic framework for failure detection and recovery. InIROS, 2024
work page 2024
- [9]
-
[10]
S. Y . Gadre, M. Wortsman, G. Ilharco, L. Schmidt, and S. Song. CoWs on pasture: Baselines and benchmarks for language-driven zero-shot object navigation. InCVPR, 2023
work page 2023
-
[11]
C. R. Garrett, T. Lozano-P ´erez, and L. P. Kaelbling. PDDLStream: Integrating symbolic plan- ners and blackbox samplers via optimistic adaptive planning. InICAPS, 2020
work page 2020
-
[12]
Y . Guo, Y .-J. Wang, L. Zha, and J. Chen. Doremi: Grounding language model by detecting and recovering from plan-execution misalignment. InIROS, 2024
work page 2024
-
[13]
D. Honerkamp, M. B”uchner, F. Despinoy, T. Welschehold, and A. Valada. Language- grounded dynamic scene graphs for interactive object search with mobile manipulation.IEEE RA-L, 2024
work page 2024
-
[14]
Y . Hong, C. Rodriguez, Y . Qi, Q. Wu, and S. Gould. VLN BERT: A recurrent vision-and- language BERT for navigation. InCVPR, 2021
work page 2021
-
[15]
M. Hu, Y . Mu, X. Yu, M. Ding, S. Wu, W. Shao, Q. Chen, B. Wang, Y . Qiao, and P. Luo. Tree-planner: Efficient close-loop task planning with large language models. InICLR, 2024. 11
work page 2024
- [16]
-
[17]
L. P. Kaelbling and T. Lozano-P ´erez. Integrated task and motion planning in belief space. IJRR, 2013
work page 2013
- [18]
- [19]
-
[20]
C. Li, R. Zhang, J. Wong, C. Gokmen, S. Srivastava, R. Mart ´ın-Mart´ın, C. Wang, G. Levine, et al. BEHA VIOR-1k: A benchmark for embodied AI with 1,000 everyday activities and realistic simulation. InCoRL, 2023
work page 2023
- [21]
-
[22]
P. Liu, Z. Guo, M. Warke, S. Chintala, C. Paxton, N. M. M. Shafiullah, and L. Pinto. Dynamem: Online dynamic spatio-semantic memory for open world mobile manipulation.arXiv, 2024
work page 2024
-
[23]
P. Liu, Y . Orru, J. Vakil, C. Paxton, N. M. M. Shafiullah, and L. Pinto. OK-Robot: What really matters in integrating open-knowledge models for robotics. InRSS, 2024
work page 2024
-
[24]
Z. Liu, A. Bahety, and S. Song. REFLECT: Summarizing robot experiences for failure expla- nation and correction. InCoRL, 2023
work page 2023
-
[25]
Y . Long, W. Cai, H. Wang, G. Zhan, and H. Dong. Instructnav: Zero-shot system for generic instruction navigation in unexplored environment.arXiv, 2024
work page 2024
-
[26]
A. Majumdar, G. Aggarwal, B. Devnani, J. Hoffman, and D. Batra. ZSON: Zero-shot object- goal navigation using multimodal goal embeddings. InNeurIPS, 2022
work page 2022
- [27]
-
[28]
A. Padmakumar, J. Thomason, A. Shrivastava, P. Lange, A. Narayan-Chen, S. Gella, R. Pira- muthu, G. Tur, and D. Hakkani-T¨ur. TEACh: Task-driven embodied agents that chat. InAAAI, 2022
work page 2022
-
[29]
R. Shah, A. Yu, Y . Zhu, Y . Zhu, and R. Martin-Martin. BUMBLE: Unifying reasoning and acting with vision-language models for building-wide mobile manipulation.arXiv, 2024
work page 2024
-
[30]
M. Shridhar, J. Thomason, D. Gordon, Y . Bisk, W. Han, R. Mottaghi, L. Zettlemoyer, and D. Fox. ALFRED: A benchmark for interpreting grounded instructions for everyday tasks. In CVPR, 2020
work page 2020
- [31]
-
[32]
C. H. Song, J. Wu, C. Washington, B. M. Sadler, W.-L. Chao, and Y . Su. LLM-Planner: Few- shot grounded planning for embodied agents with large language models. InICCV, 2023
work page 2023
-
[33]
S. Yenamandra, A. Ramachandran, K. Yadav, A. Wang, M. Khanna, T. Gervet, T.-Y . Yang, V . Jain, et al. Homerobot: Open-vocabulary mobile manipulation. InCoRL, 2023
work page 2023
- [34]
-
[35]
E. Zhou, Q. Su, C. Chi, Z. Zhang, Z. Wang, T. Huang, L. Sheng, and H. Wang. Code-as- monitor: Constraint-aware visual programming for reactive and proactive robotic failure de- tection. InCVPR, 2026. 12 A Auxiliary Memory and Monitor Analyses Memory is treated as auxiliary runtime context in the main paper. It records recent observations, completed stages...
work page 2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.