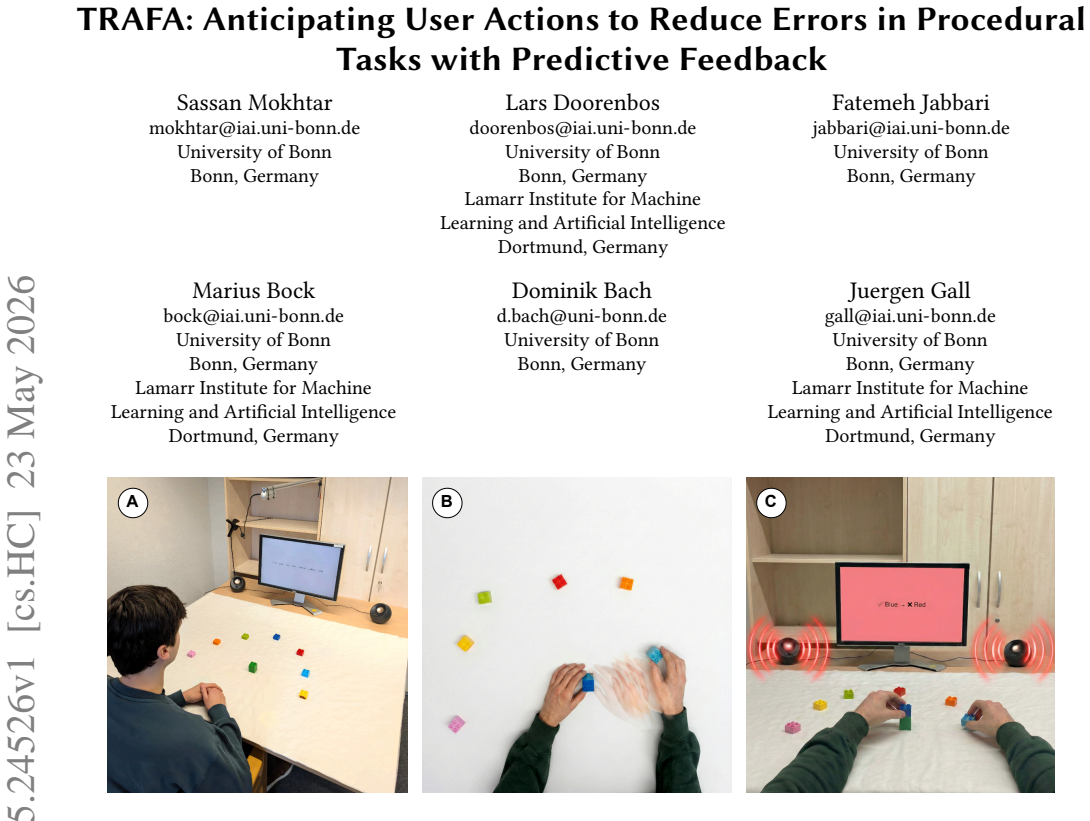
TRAFA: Anticipating User Actions to Reduce Errors in Procedural Tasks with Predictive Feedback
Pith reviewed 2026-06-30 12:38 UTC · model grok-4.3
The pith
Predictive feedback anticipates actions to improve accuracy and efficiency in procedural tasks.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
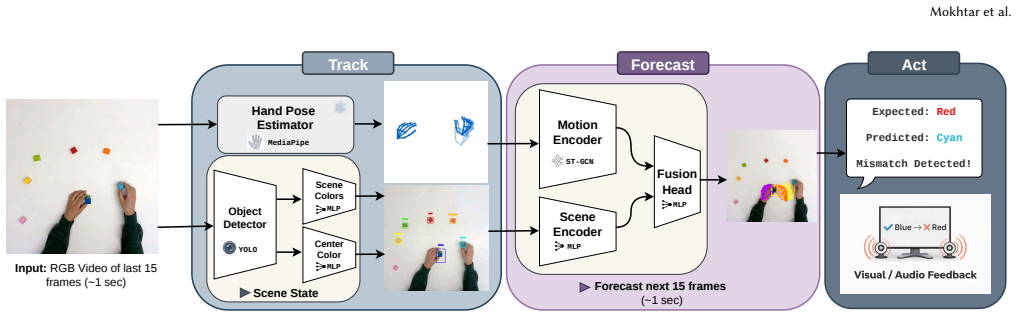
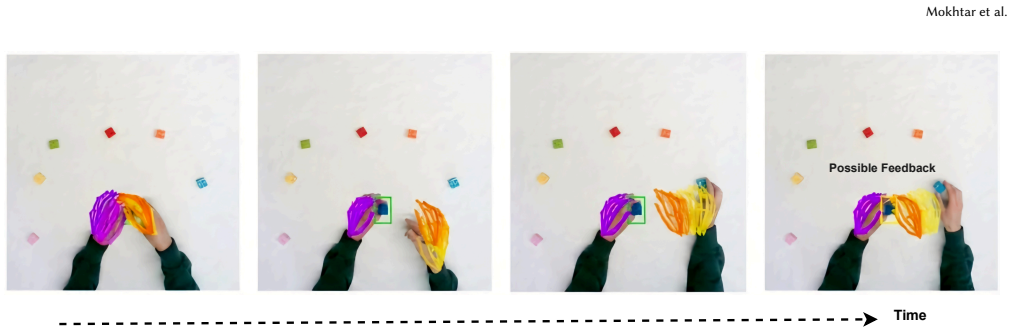
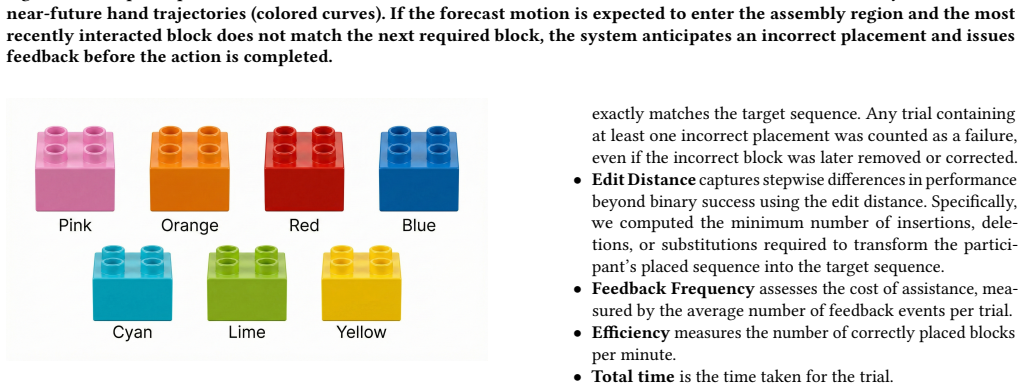
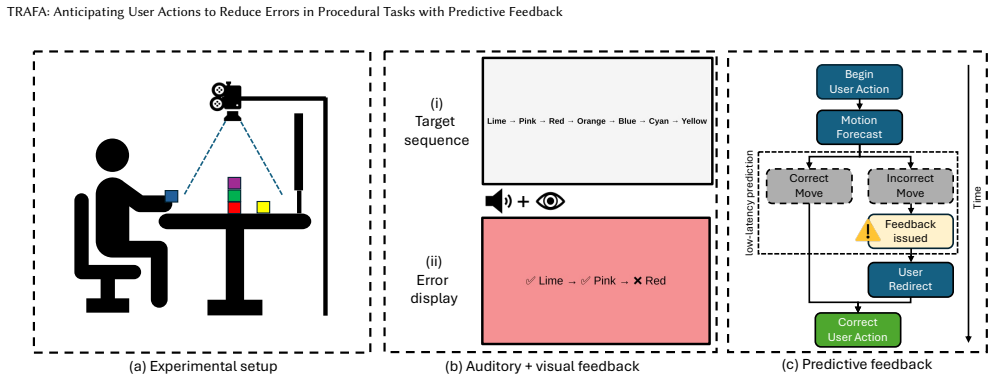
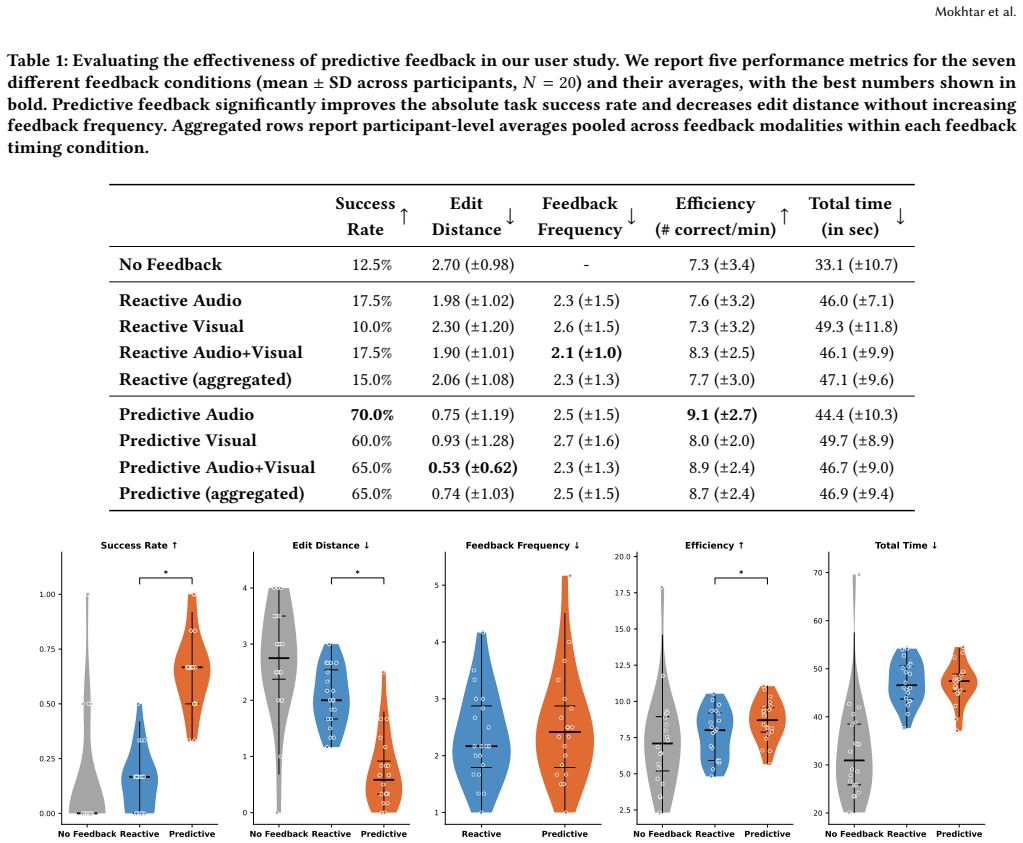
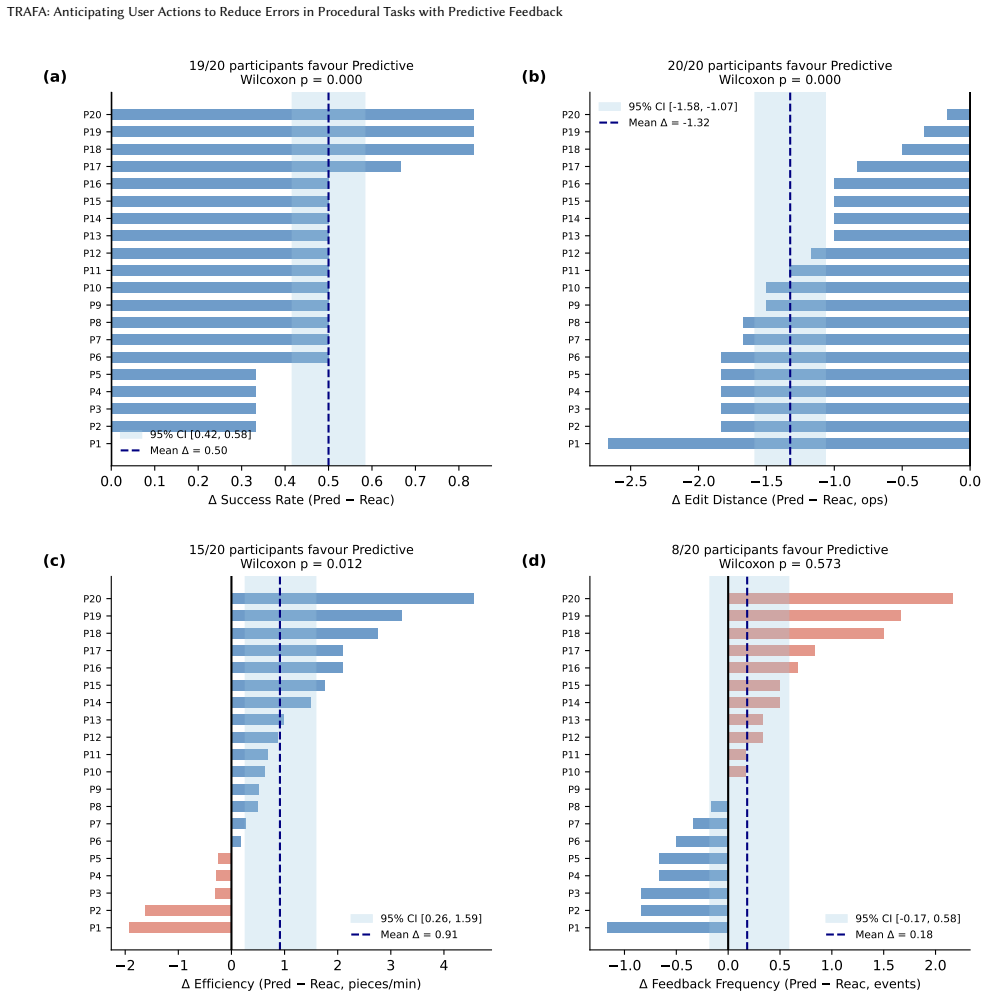
TRAFA operationalizes predictive feedback through a Track-Forecast-Act framework that tracks hand and object state, forecasts user motion conditioned on scene context, and triggers feedback when a predicted action is likely to violate task constraints. We instantiate this pipeline in a sequential assembly setting and evaluate it through both technical benchmarking and a controlled user study against conventional reactive feedback. Our results show that predictive feedback improves task accuracy and efficiency while maintaining a comparable number of feedback events.
What carries the argument
The Track-Forecast-Act framework that tracks current hand and object state, forecasts future motion from scene context, and issues pre-error feedback on predicted constraint violations.
If this is right
- Task accuracy rises when feedback arrives before the erroneous action is completed.
- Completion time shortens without an increase in the total number of feedback events delivered.
- Feedback timing itself becomes a controllable design variable for assistance systems.
- Real-time motion forecasting can be embedded in interactive tools to block errors at the source.
Where Pith is reading between the lines
- The same anticipation approach could extend to other step-by-step activities such as medical device setup or equipment maintenance where early correction saves time and materials.
- Combining the forecast with richer scene understanding might allow the system to handle less structured environments beyond fixed assembly sequences.
- Long-term deployment could test whether users learn to rely on the predictive cues and change their own error rates over repeated sessions.
Load-bearing premise
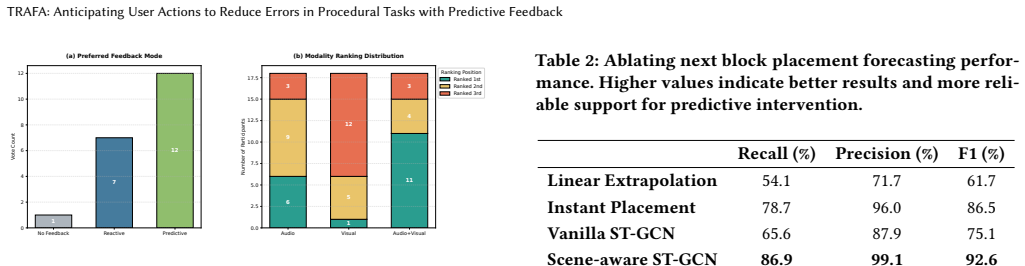
The forecasting step can predict user motion reliably enough in real time to avoid too many false alarms that would frustrate users.
What would settle it
A replication user study on the same assembly task in which the predictive condition shows no gain in accuracy or requires substantially more feedback events than the reactive baseline.
Figures
read the original abstract
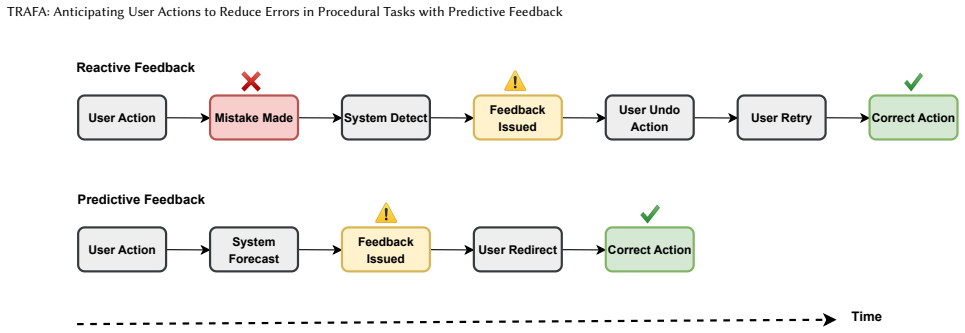
Interactive assistance systems typically provide feedback after an action has been completed, supporting error recovery but not preventing the error itself. We present TRAFA, a real-time predictive feedback system for procedural tasks that intervenes before errors are committed. TRAFA operationalizes predictive feedback through a Track-Forecast-Act framework that tracks hand and object state, forecasts user motion conditioned on scene context, and triggers feedback when a predicted action is likely to violate task constraints. We instantiate this pipeline in a sequential assembly setting and evaluate it through both technical benchmarking and a controlled user study against conventional reactive feedback. Our results show that predictive feedback improves task accuracy and efficiency while maintaining a comparable number of feedback events. These findings position feedback timing as a key dimension in system design and show how real-time anticipation can be integrated into interactive systems to prevent errors before they occur.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces TRAFA, a real-time predictive feedback system for procedural tasks that uses a Track-Forecast-Act pipeline: tracking hand/object state, forecasting user motion conditioned on scene context, and triggering feedback on predicted constraint violations. It evaluates the system in a sequential assembly task via technical benchmarking and a controlled user study against conventional reactive feedback, claiming improved accuracy and efficiency with a comparable number of feedback events.
Significance. If the empirical results are robust, the work usefully demonstrates that feedback timing is a design dimension worth explicit attention and provides a concrete example of integrating real-time anticipation into interactive assistance systems to prevent rather than recover from errors. The dual evaluation (benchmarking plus user study) is a strength when properly reported.
major comments (2)
- [§5] §5 (User Study) and associated results tables: the abstract and evaluation sections assert positive outcomes on accuracy, efficiency, and feedback-event counts, yet report no sample sizes, error bars, statistical tests, or exclusion criteria. This prevents any assessment of whether the data actually support the central claim and is load-bearing for the empirical contribution.
- [§4.2] §4.2 (Forecasting module): the weakest assumption identified by the reader—the reliability of real-time motion prediction without excessive false alarms—is not quantified with false-positive rates, latency distributions, or user-trust metrics. Without these, it is impossible to judge whether the predictive component is practically viable or merely adds noise.
minor comments (2)
- [Abstract] Abstract: the quantitative claims would be stronger if the abstract itself included at least one key effect size or p-value from the user study.
- [§3] Notation: the Track-Forecast-Act pipeline is described at a high level; a compact pseudocode or data-flow diagram would clarify the interfaces between modules.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback highlighting gaps in empirical reporting. We address each major comment below and will revise the manuscript to strengthen the presentation of results.
read point-by-point responses
-
Referee: [§5] §5 (User Study) and associated results tables: the abstract and evaluation sections assert positive outcomes on accuracy, efficiency, and feedback-event counts, yet report no sample sizes, error bars, statistical tests, or exclusion criteria. This prevents any assessment of whether the data actually support the central claim and is load-bearing for the empirical contribution.
Authors: We agree that these details are necessary for evaluating the claims. The current manuscript omits sample size, error bars, statistical tests, and exclusion criteria in §5 and the associated tables. In the revised version we will add the participant count, error bars on all reported metrics, results of appropriate statistical tests (e.g., paired t-tests or ANOVA with p-values), and a clear statement of exclusion criteria to allow readers to assess support for the accuracy and efficiency improvements. revision: yes
-
Referee: [§4.2] §4.2 (Forecasting module): the weakest assumption identified by the reader—the reliability of real-time motion prediction without excessive false alarms—is not quantified with false-positive rates, latency distributions, or user-trust metrics. Without these, it is impossible to judge whether the predictive component is practically viable or merely adds noise.
Authors: We acknowledge that false-positive rates and latency distributions for the forecasting module are not reported in §4.2. The technical benchmarking section contains some prediction accuracy figures, but not the requested trigger-level false-positive analysis or latency histograms. In revision we will add these metrics computed from the existing evaluation data. User-trust metrics were not collected; we will explicitly note this as a limitation and discuss implications for practical viability. revision: partial
Circularity Check
No significant circularity detected
full rationale
The paper describes an empirical HCI system (TRAFA) and reports results from technical benchmarking plus a controlled user study comparing predictive vs. reactive feedback. No equations, parameter fits, uniqueness theorems, or derivation chains appear in the provided text. The central claim (improved accuracy/efficiency with comparable feedback events) is presented as an experimental outcome, not a mathematical identity or self-referential prediction. No load-bearing self-citations or ansatzes are visible that would reduce the result to its inputs by construction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Piotr D Adamczyk and Brian P Bailey. 2004. If not now, when? The effects of interruption at different moments within task execution. InProceedings of the SIGCHI conference on Human factors in computing systems. 271–278
2004
-
[2]
Riku Arakawa, Jill Fain Lehman, and Mayank Goel. 2024. Prism-q&a: Step-aware voice assistant on a smartwatch enabled by multimodal procedure tracking and large language models.Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies8, 4 (2024), 1–26
2024
-
[3]
Riku Arakawa, Prasoon Patidar, Will Page, Jill Lehman, and Mayank Goel. 2025. Scaling Context-Aware Task Assistants that Learn from Demonstration and Adapt through Mixed-Initiative Dialogue. InProceedings of the 38th Annual ACM Symposium on User Interface Software and Technology. 1–19
2025
-
[4]
Riku Arakawa, Hiromu Yakura, and Mayank Goel. 2024. PrISM-Observer: In- tervention agent to help users perform everyday procedures sensed using a smartwatch. InProceedings of the 37th Annual ACM Symposium on User Interface Software and Technology. 1–16
2024
-
[5]
Riku Arakawa, Hiromu Yakura, Vimal Mollyn, Suzanne Nie, Emma Russell, Dustin P DeMeo, Haarika A Reddy, Alexander K Maytin, Bryan T Carroll, Jill Fain Lehman, et al . 2023. Prism-tracker: A framework for multimodal procedure tracking using wearable sensors and state transition information with user- driven handling of errors and uncertainty.Proceedings of ...
2023
-
[6]
Dominik Bial, Dagmar Kern, Florian Alt, and Albrecht Schmidt. 2011. Enhancing outdoor navigation systems through vibrotactile feedback. InCHI’11 Extended Abstracts on Human Factors in Computing Systems. 1273–1278
2011
-
[7]
Mattias Billast, Jonas De Bruyne, Klaas Bombeke, Tom De Schepper, and Kevin Mets. 2024. Physical ergonomics anticipation with human motion prediction. SciTePress
2024
-
[8]
2018.The psychology of human-computer interaction
Stuart K Card. 2018.The psychology of human-computer interaction. Crc Press
2018
- [9]
-
[10]
Tanvir Ahmed Chowdhury and Raihanul Kabir Hasan. 2025. Real-Time Human Intention Recognition for Safe and Efficient Interaction in Assistive Robotic Platforms.Transactions on Machine Learning, Artificial Intelligence, and Advanced Intelligent Systems15, 4 (2025), 1–14
2025
-
[11]
Tom Djajadiningrat, Kees Overbeeke, and Stephan Wensveen. 2002. But how, Donald, tell us how? On the creation of meaning in interaction design through feedforward and inherent feedback. InProceedings of the 4th conference on De- signing interactive systems: processes, practices, methods, and techniques. 285–291
2002
-
[12]
Christopher Frauenberger and Tony Stockman. 2009. Auditory display design—an investigation of a design pattern approach.International Journal of Human- Computer Studies67, 11 (2009), 907–922
2009
-
[13]
Euan Freeman, Graham Wilson, Dong-Bach Vo, Alex Ng, Ioannis Politis, and Stephen Brewster. 2017. Multimodal feedback in HCI: haptics, non-speech audio, and their applications. InThe Handbook of Multimodal-Multisensor Interfaces: Foundations, User Modeling, and Common Modality Combinations-Volume 1. 277– 317
2017
-
[14]
Markus Funk, Tilman Dingler, Jennifer Cooper, and Albrecht Schmidt. 2015. Stop Helping Me - I’m Bored!: Why Assembly Assistance Needs to Be Adaptive. InProceedings of the 2015 ACM International Joint Conference on Pervasive and Ubiquitous Computing and Proceedings of the 2015 ACM International Symposium on Wearable Computers - UbiComp ’15. ACM Press, Osak...
-
[15]
Markus Funk, Juana Heusler, Elif Akcay, Klaus Weiland, and Albrecht Schmidt
-
[16]
Haptic, Auditory, or Visual?: Towards Optimal Error Feedback at Manual Assembly Workplaces. InProceedings of the 9th ACM International Conference on PErvasive Technologies Related to Assistive Environments. ACM, Corfu Island Greece, 1–6. doi:10.1145/2910674.2910683
-
[17]
Markus Funk, Sven Mayer, and Albrecht Schmidt. 2015. Using In-Situ Projection to Support Cognitively Impaired Workers at the Workplace. InProceedings of the 17th International ACM SIGACCESS Conference on Computers & Accessibility - ASSETS ’15. ACM Press, Lisbon, Portugal, 185–192. doi:10.1145/2700648.2809853
-
[18]
Gerard Gómez-Izquierdo, Javier Laplaza, Alberto Sanfeliu, and Anaís Garrell
-
[19]
In2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Enhancing context-aware human motion prediction for efficient robot handovers. In2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 16917–16922
-
[20]
James Hereford and William Winn. 1994. Non-speech sound in human-computer interaction: A review and design guidelines.Journal of Educational Computing Research11, 3 (1994), 211–233
1994
-
[21]
Edward Howie, Sharleen Sy, Louisa Ford, and Kim J Vicente. 2000. Human– computer interface design can reduce misperceptions of feedback.System Dy- namics Review: the Journal of the System Dynamics Society16, 3 (2000), 151–171
2000
-
[22]
2023.Ultralytics YOLOv8
Glenn Jocher, Ayush Chaurasia, and Jing Qiu. 2023.Ultralytics YOLOv8. https: //github.com/ultralytics/ultralytics Version 8.x
2023
-
[23]
Mishel Johns, Brian Mok, Walter Talamonti, Srinath Sibi, and Wendy Ju. 2017. Looking ahead: Anticipatory interfaces for driver-automation collaboration. In 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC). IEEE, 1–7
2017
-
[24]
Matthew Johnson, Jeffrey M Bradshaw, Paul J Feltovich, Catholijn M Jonker, M Birna Van Riemsdijk, and Maarten Sierhuis. 2014. Coactive design: Designing support for interdependence in joint activity.Journal of Human-Robot Interaction 3, 1 (2014), 43–69
2014
-
[25]
David Kirsh and Paul Maglio. 1994. On distinguishing epistemic from pragmatic action.Cognitive science18, 4 (1994), 513–549
1994
-
[26]
Bjoern Klages, Jennifer Graf, and Michael Zaeh. 2024. Human errors in manual assembly–A survey on current and future relevance.Procedia CIRP130 (2024), 1556–1561
2024
-
[27]
Javier Laplaza, Francesc Moreno, and Alberto Sanfeliu. 2025. Enhancing robotic collaborative tasks through contextual human motion prediction and intention inference.International Journal of Social Robotics17, 10 (2025), 2077–2096
2025
-
[28]
Yang Le, Su Qiang, and Shen Liangfa. 2012. A novel method of analyzing quality defects due to human errors in engine assembly line. In2012 International conference on information management, innovation management and industrial engineering, Vol. 3. IEEE, 154–157
2012
-
[29]
Chenyi Li, Guande Wu, Gromit Yeuk-Yin Chan, Dishita Gdi Turakhia, Sonia Castelo Quispe, Dong Li, Leslie Welch, Claudio Silva, and Jing Qian. 2025. Satori: Towards Proactive AR Assistant with Belief-Desire-Intention User Modeling. In Proceedings of the 2025 CHI Conference on Human Factors in Computing Systems. 1–24
2025
-
[30]
Camillo Lugaresi, Jiuqiang Tang, Hadon Nash, Chris McClanahan, Esha Uboweja, Michael Hays, Fan Zhang, Chuo-Ling Chang, Ming Guang Yong, Juhyun Lee, et al. 2019. Mediapipe: A framework for building perception pipelines.arXiv preprint arXiv:1906.08172(2019)
work page internal anchor Pith review Pith/arXiv arXiv 2019
-
[31]
Steven Macenski, Tully Foote, Brian Gerkey, Chris Lalancette, and William Woodall. 2022. Robot operating system 2: Design, architecture, and uses in the wild.Science robotics7, 66 (2022), eabm6074
2022
-
[32]
Manisha Natarajan and Matthew Gombolay. 2024. Trust and dependence on robotic decision support.IEEE Transactions on Robotics40 (2024), 4670–4689
2024
-
[33]
1994.Usability engineering
Jakob Nielsen. 1994.Usability engineering. Morgan Kaufmann
1994
-
[34]
Victor Noppeney, Felix M Escalante, Lucas Maggi, and Thiago Boaventura. 2024. HuMAn–the Human Motion Anticipation Algorithm Based on Recurrent Neural Networks.IEEE Robotics and Automation Letters9, 12 (2024), 11521–11528
2024
-
[35]
2013.The design of everyday things: Revised and expanded edition
Don Norman. 2013.The design of everyday things: Revised and expanded edition. Basic books
2013
-
[36]
Shraddha Vijay Pawar, Balavarun Pedapudi, Pramod Kaushik, Sarath Sivaprasad, Mario Fritz, and Shirish Karande. 2025. EARL: Early Intent Recognition in GUI Tasks Using Theory of Mind. InICML 2025 Workshop on Computer Use Agents
2025
-
[37]
Ronald Poelman, Zoltan Rusak, Alexander Verbraeck, and L Sorasu Alcubilla
-
[38]
The Effect of Visual Feedback on Learnability and Usability of Design Methods.Journal of Mechanical Engineering/Strojniški Vestnik56, 11 (2010)
2010
-
[39]
Stefan-Alexandru Precup, Snehal Walunj, Arpad Gellert, Christiane Plocien- nik, Jibinraj Antony, Constantin-Bala Zamfirescu, and Martin Ruskowski. 2023. Recognising Worker Intentions by Assembly Step Prediction. In2023 IEEE 28th In- ternational Conference on Emerging Technologies and Factory Automation (ETFA). IEEE, Sinaia, Romania, 1–8. doi:10.1109/ETFA5...
-
[40]
Harshad Puranik, Joel Koopman, and Heather C Vough. 2020. Pardon the inter- ruption: An integrative review and future research agenda for research on work interruptions.Journal of Management46, 6 (2020), 806–842
2020
-
[41]
Matthias Rauterberg and Erich Styger. 1994. Positive effects of sound feedback during the operation of a plant simulator. InInternational Conference on Human- Computer Interaction. Springer, 35–44
1994
-
[42]
Nikhila Ravi, Valentin Gabeur, Yuan-Ting Hu, Ronghang Hu, Chaitanya Ryali, Tengyu Ma, Haitham Khedr, Roman Rädle, Chloe Rolland, Laura Gustafson, et al
-
[43]
InInternational Conference on Learning Representations, Vol
Sam 2: Segment anything in images and videos. InInternational Conference on Learning Representations, Vol. 2025. 28085–28128
2025
-
[44]
Joseph Redmon, Santosh Divvala, Ross Girshick, and Ali Farhadi. 2016. You only look once: Unified, real-time object detection. InProceedings of the IEEE conference on computer vision and pattern recognition. 779–788
2016
-
[45]
Iran R Roman, Auriel Washburn, Edward W Large, Chris Chafe, and Takako Fujioka. 2019. Delayed feedback embedded in perception-action coordination cycles results in anticipation behavior during synchronized rhythmic action: A dynamical systems approach.PLoS computational biology15, 10 (2019), e1007371
2019
-
[46]
Beat Rossmy, Nađa Terzimehić, Tanja Döring, Daniel Buschek, and Alexander Wiethoff. 2023. Point of no undo: Irreversible interactions as a design strategy. InProceedings of the 2023 chi conference on human factors in computing systems. 1–18
2023
-
[47]
Nina Schaffert, Thenille Braun Janzen, Klaus Mattes, and Michael H. Thaut. 2019. A Review on the Relationship Between Sound and Movement in Sports and Rehabilitation.Frontiers in Psychology10 (2019), 244. doi:10.3389/fpsyg.2019. 00244
-
[48]
James W Suliburk, Quentin M Buck, Chris J Pirko, Nader N Massarweh, Neal R Barshes, Hardeep Singh, and Todd K Rosengart. 2019. Analysis of human perfor- mance deficiencies associated with surgical adverse events.JAMA network open 2, 7 (2019), e198067. Mokhtar et al
2019
-
[49]
2013.Feedforward and feedback mechanisms in sensory motor control
Julian Jonathan Tramper. 2013.Feedforward and feedback mechanisms in sensory motor control. Sl: sn
2013
-
[50]
Jo Vermeulen, Kris Luyten, Elise Van Den Hoven, and Karin Coninx. 2013. Cross- ing the bridge over Norman’s Gulf of Execution: revealing feedforward’s true identity. InProceedings of the SIGCHI Conference on Human Factors in Computing Systems. 1931–1940
2013
-
[51]
Sijie Yan, Yuanjun Xiong, and Dahua Lin. 2018. Spatial temporal graph convo- lutional networks for skeleton-based action recognition. InProceedings of the AAAI conference on artificial intelligence, Vol. 32
2018
-
[52]
Koji Yatani, Darren Gergle, and Khai Truong. 2012. Investigating effects of visual and tactile feedback on spatial coordination in collaborative handheld systems. InProceedings of the ACM 2012 conference on Computer Supported Cooperative Work. 661–670
2012
-
[53]
Guofan Yin, Martin J.-D. Otis, Pascal E. Fortin, and Jeremy R. Cooperstock. 2019. Evaluating Multimodal Feedback for Assembly Tasks in a Virtual Environment. Proceedings of the ACM on Human-Computer Interaction3, EICS (2019), 1–11. doi:10.1145/3331163
-
[54]
Difeng Yu, Ruta Desai, Ting Zhang, Hrvoje Benko, Tanya R Jonker, and Aakar Gupta. 2022. Optimizing the timing of intelligent suggestion in virtual reality. In Proceedings of the 35th Annual ACM Symposium on User Interface Software and Technology. 1–20
2022
-
[55]
Guanhua Zhang, Susanne Hindennach, Jan Leusmann, Felix Bühler, Benedict Steuerlein, Sven Mayer, Mihai Bâce, and Andreas Bulling. 2022. Predicting next actions and latent intents during text formatting. InWorkshop on Computational Approaches for Understanding, Generating, and Adapting User Interfaces. Self- published. A Per-Participant Paired Differences F...
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.