Time Segmented Beamforming via Dynamic Programming: Theory and Implementation
Pith reviewed 2026-06-30 00:18 UTC · model grok-4.3
The pith
A beamformer uses dynamic programming to segment time into locally stationary intervals for adapting covariance estimates to moving interferers.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that by incorporating data-driven temporal segmentation into practical Capon beamforming via dynamic programming, the resulting formulation minimizes output power while dynamically adapting the SCM estimation windows to local stationarity, offering a principled approach to tracking time-varying interferers.
What carries the argument
The temporally segmented distortionless response beamformer, which uses dynamic programming to choose segmentation boundaries and adapt SCM windows while enforcing unity gain in the desired direction.
If this is right
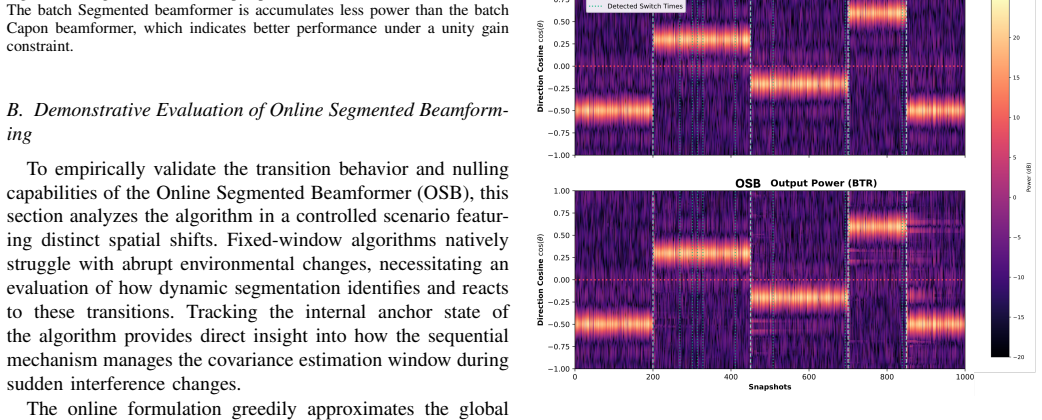
- The beamformer adapts SCM windows to local stationarity and thereby maintains effective nulling against time-varying interferers.
- Segmentation boundaries are chosen to minimize output power subject to the distortionless constraint and a complexity penalty.
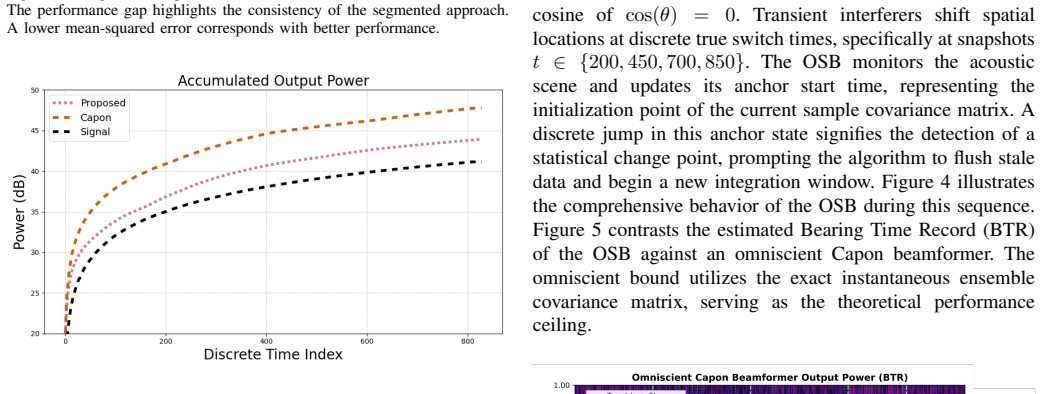
- Fixed or excessively long batch windows are avoided because they smear the SCM and degrade performance in non-stationary settings.
- The approach supplies a data-driven alternative to manual or heuristic window selection in array processing.
Where Pith is reading between the lines
- The dynamic programming segmentation step could be combined with other adaptive beamformers that rely on covariance estimates.
- In real-time acoustic systems the method might trade off segmentation recomputation frequency against tracking speed.
- The penalty parameter in the segmentation cost could be learned from data rather than set by hand in different environments.
- The same segmentation logic might apply to change-point detection problems outside beamforming.
Load-bearing premise
The acoustic data admits a segmentation into locally stationary intervals whose boundaries can be recovered by dynamic programming without the penalty term introducing bias that invalidates the beamformer solution.
What would settle it
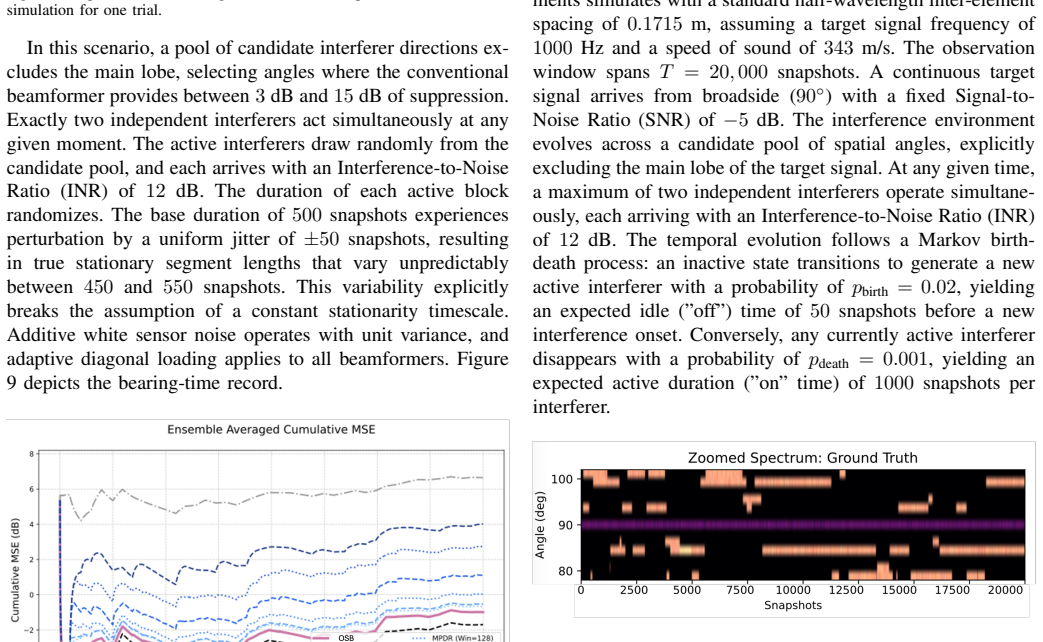
In a simulation with known moving interferers, if the segmented beamformer produces no deeper nulls at the interferer directions than a standard batch Capon using a single fixed window chosen to match average stationarity length, the benefit of dynamic segmentation would be refuted.
Figures
read the original abstract
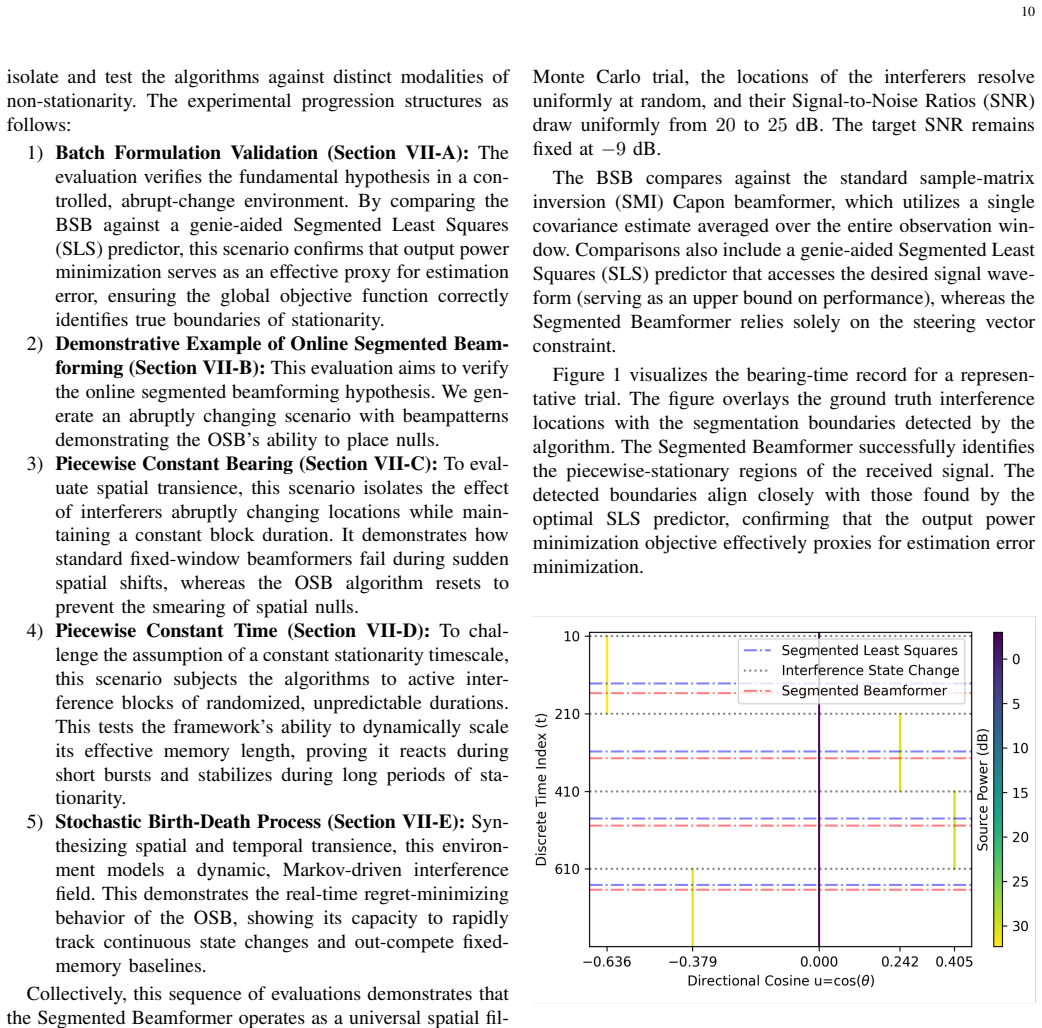
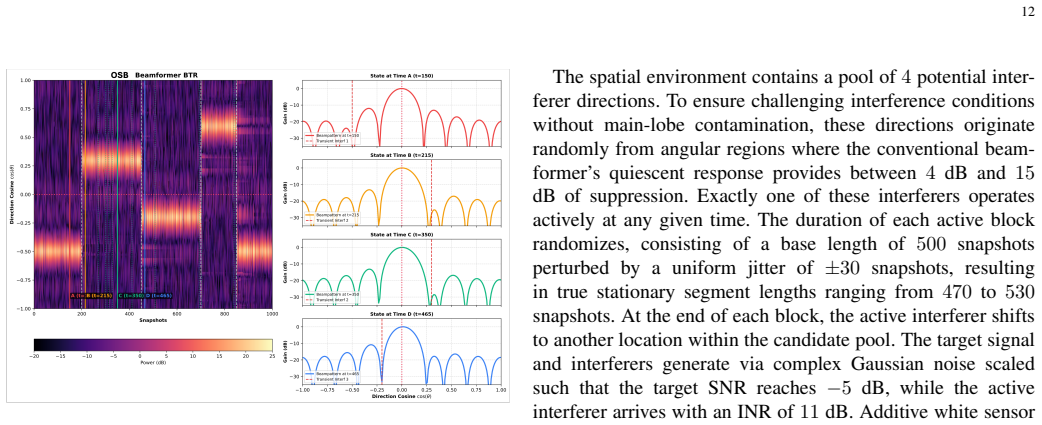
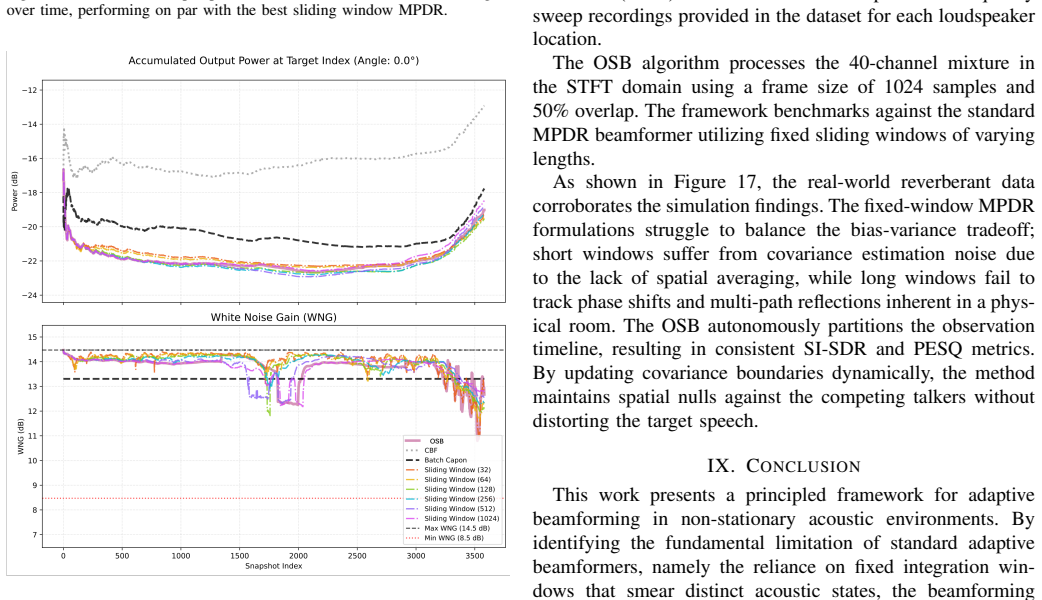
In dynamic acoustic environments with time-varying interferers, effective beamforming requires identifying stationary regions over time. The Capon beamformer, a whitened matched filter constrained to maintain unity gain in the desired direction, theoretically relies on the instantaneous ensemble covariance matrix. Practical implementations rely on the batch Capon (or Sample Matrix Inversion), which estimates the sample covariance matrix (SCM) by averaging over a block of snapshots. This practical approach implicitly assumes that the data within the batch window is stationary and can be coherently combined. In non-stationary settings, a batch approach that averages over fixed or excessively long windows fails, as moving interferers smear the SCM and degrade the beamformer's nulling capabilities. To address this, this paper introduces a temporally segmented distortionless response beamformer. Inspired by the segmented least squares method, which fits piecewise polynomials to data while penalizing excessive segmentation to prevent overfitting, the framework extends practical Capon beamforming by incorporating data-driven temporal segmentation. This formulation minimizes output power while dynamically adapting the SCM estimation windows to local stationarity, offering a principled approach to tracking time-varying interferers.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a temporally segmented distortionless response beamformer that casts Capon beamforming as a dynamic programming problem. Per-segment costs are defined via the Capon output power (w^H R̂ w) on locally estimated sample covariance matrices, with a global objective that adds a linear penalty λ per additional segment (inspired by segmented least squares) to recover change points corresponding to intervals of local stationarity, thereby adapting SCM windows to time-varying interferers without fixed batch averaging.
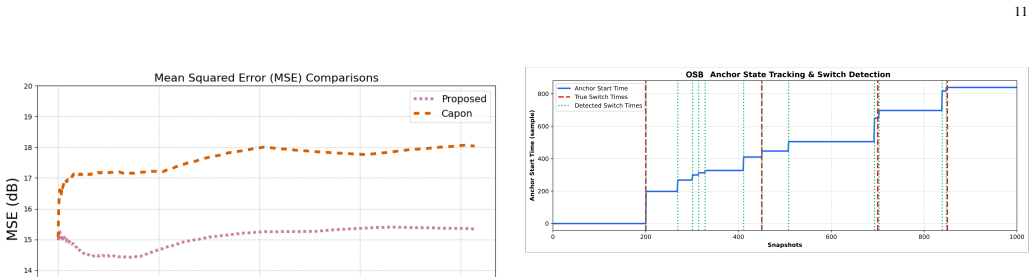
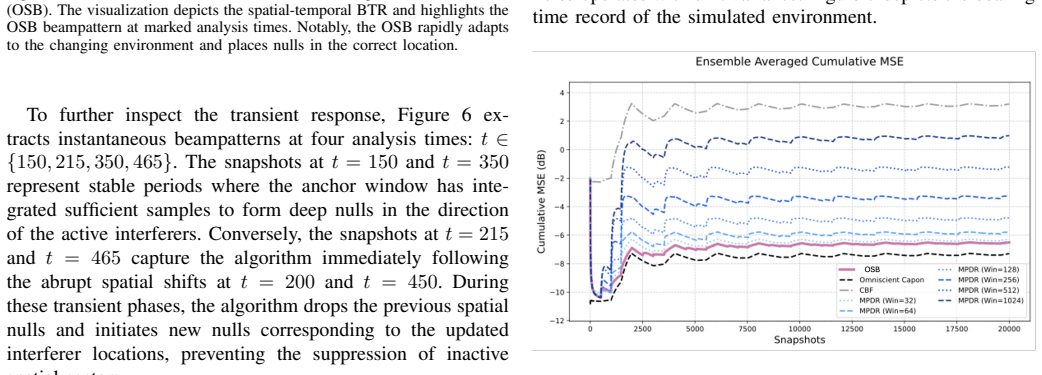
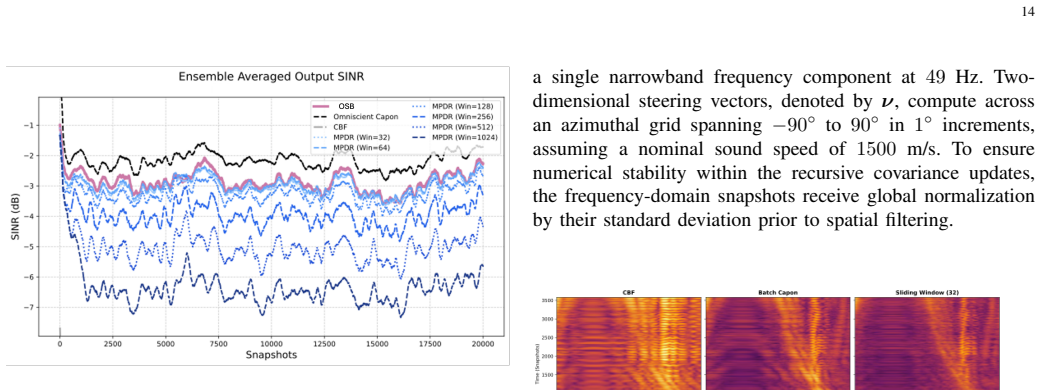
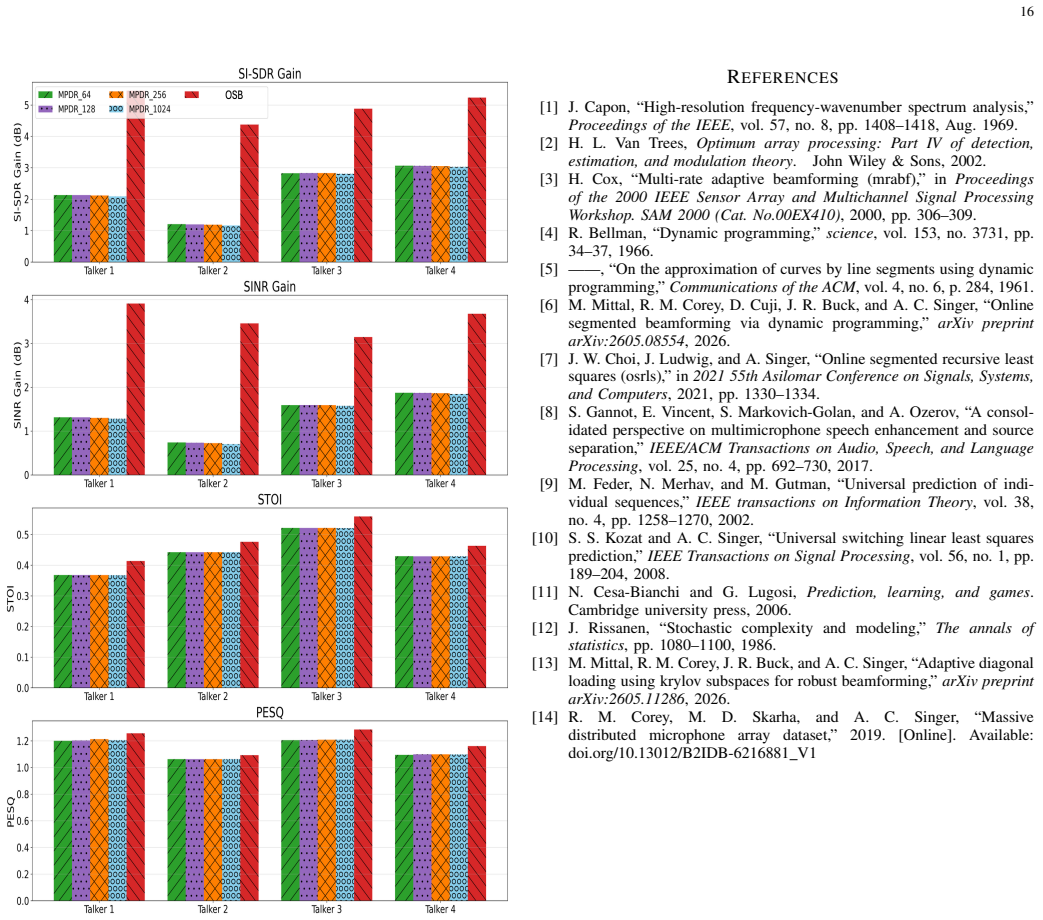
Significance. If the DP-recovered segments provably align with true stationarity boundaries and the resulting per-segment SCMs remain consistent estimators, the method would supply an efficient, data-driven alternative to fixed-window batch Capon beamforming for tracking moving interferers in acoustic arrays, with potential gains in null depth and output SINR under piecewise-stationary models.
major comments (3)
- [DP formulation] DP objective (formulation section): the per-segment cost uses the Capon power on the sample covariance R̂ while the global objective adds an explicit linear penalty λ per change point; no derivation or consistency argument is supplied showing that the minimizer recovers boundaries that coincide with genuine stationarity intervals, so that each R̂ remains an unbiased estimator of the local ensemble covariance under the piecewise-stationary model.
- [Abstract / Theory] Abstract and theory: the headline claim that the approach 'minimizes output power while dynamically adapting the SCM estimation windows to local stationarity' is load-bearing on the penalty term not introducing bias; the manuscript provides no analysis or bound demonstrating that an arbitrary λ preserves optimality of the resulting beamformer nulls or avoids either over-segmentation (rank-deficient R̂) or under-segmentation (smeared interferers).
- [Implementation / Experiments] Implementation / experiments: no error analysis, convergence rate for the DP recursion, or sensitivity study with respect to λ is reported, leaving open whether the recovered segmentation actually improves nulling performance over standard Capon on the same data.
minor comments (2)
- [Notation] Notation: the distinction between the instantaneous ensemble covariance and the per-segment sample covariance R̂ should be made explicit with distinct symbols throughout.
- [Introduction] References: the connection to segmented least squares is stated but the precise citation for the original DP algorithm used as the template is missing.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive report. We address each major comment below, acknowledging where the manuscript lacks formal analysis and indicating the revisions we will make.
read point-by-point responses
-
Referee: [DP formulation] DP objective (formulation section): the per-segment cost uses the Capon power on the sample covariance R̂ while the global objective adds an explicit linear penalty λ per change point; no derivation or consistency argument is supplied showing that the minimizer recovers boundaries that coincide with genuine stationarity intervals, so that each R̂ remains an unbiased estimator of the local ensemble covariance under the piecewise-stationary model.
Authors: We agree that no formal consistency argument or derivation is provided showing that the DP minimizer recovers exact stationarity boundaries under the piecewise-stationary model. The formulation directly extends the segmented least squares objective by replacing the squared-error cost with the Capon output power w^H R̂ w per segment. This choice is motivated by the desire to minimize beamformer output power while penalizing additional segments, but the manuscript treats the recovery of local stationarity as an empirical property rather than a proven one. We will add an explicit remark in the theory section noting the absence of such a consistency result and identifying it as an open question. revision: partial
-
Referee: [Abstract / Theory] Abstract and theory: the headline claim that the approach 'minimizes output power while dynamically adapting the SCM estimation windows to local stationarity' is load-bearing on the penalty term not introducing bias; the manuscript provides no analysis or bound demonstrating that an arbitrary λ preserves optimality of the resulting beamformer nulls or avoids either over-segmentation (rank-deficient R̂) or under-segmentation (smeared interferers).
Authors: The abstract phrasing summarizes the optimization objective, which minimizes the sum of per-segment Capon powers subject to the linear penalty on the number of segments. We acknowledge that the manuscript supplies no analytic bounds on λ guaranteeing that the resulting segmentation avoids bias, rank deficiency, or smearing. In the current work λ is treated as a tunable parameter selected to balance the trade-off. We will revise the abstract to qualify the claim as achieving data-driven window adaptation via the penalized optimization (rather than guaranteeing optimality for arbitrary λ) and will add a short paragraph in the theory section discussing the role and selection of λ. revision: yes
-
Referee: [Implementation / Experiments] Implementation / experiments: no error analysis, convergence rate for the DP recursion, or sensitivity study with respect to λ is reported, leaving open whether the recovered segmentation actually improves nulling performance over standard Capon on the same data.
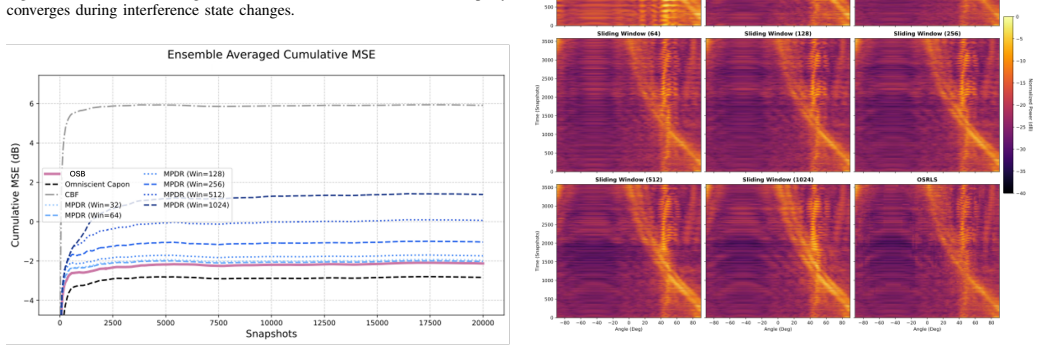
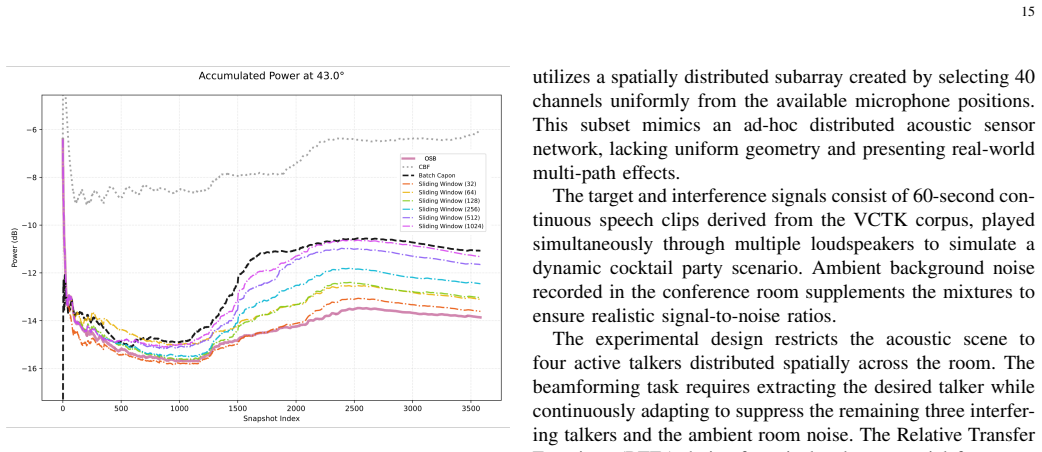
Authors: The experiments section reports improved null depth and output SINR relative to fixed-window Capon on simulated data with moving interferers, but we agree that no error analysis, sensitivity study over λ, or discussion of DP recursion properties is included. The DP recursion is solved exactly in O(N^2) time via the standard forward recursion for segmented least squares; it is not an iterative algorithm requiring convergence rates. We will add a sensitivity analysis subsection that varies λ, reports the resulting change-point locations and beamformer metrics, and includes a brief note on the exact polynomial-time solvability of the recursion. revision: yes
Circularity Check
No significant circularity; derivation builds on external Capon and segmented least-squares methods
full rationale
The paper defines its temporally segmented beamformer explicitly as the solution to a dynamic programming problem whose per-segment cost is the Capon output power and whose objective adds an explicit linear penalty on the number of segments. This construction is stated up front and does not claim to derive or predict any external quantity (such as stationarity boundaries or null depths) that is then shown to equal the input by the paper's own equations. No self-citation is invoked as a load-bearing uniqueness theorem, no fitted parameter is relabeled as a prediction, and the central claim remains an algorithmic formulation rather than a tautological reduction. The approach therefore stays self-contained against the cited external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- segmentation penalty parameter
axioms (1)
- domain assumption The acoustic environment consists of intervals of local stationarity that can be identified from the data.
Forward citations
Cited by 1 Pith paper
-
A Switching Beamformer for Highly Non-Stationary Environments
Introduces the Universal Switching Beamformer that maintains an exponentially large set of covariance histories via a linear transition diagram and re-weights them by cumulative output power, with a proven regret boun...
Reference graph
Works this paper leans on
-
[1]
High-resolution frequency-wavenumber spectrum analysis,
J. Capon, “High-resolution frequency-wavenumber spectrum analysis,” Proceedings of the IEEE, vol. 57, no. 8, pp. 1408–1418, Aug. 1969
1969
-
[2]
H. L. Van Trees,Optimum array processing: Part IV of detection, estimation, and modulation theory. John Wiley & Sons, 2002
2002
-
[3]
Multi-rate adaptive beamforming (mrabf),
H. Cox, “Multi-rate adaptive beamforming (mrabf),” inProceedings of the 2000 IEEE Sensor Array and Multichannel Signal Processing Workshop. SAM 2000 (Cat. No.00EX410), 2000, pp. 306–309
2000
-
[4]
Dynamic programming,
R. Bellman, “Dynamic programming,”science, vol. 153, no. 3731, pp. 34–37, 1966
1966
-
[5]
On the approximation of curves by line segments using dynamic programming,
——, “On the approximation of curves by line segments using dynamic programming,”Communications of the ACM, vol. 4, no. 6, p. 284, 1961
1961
-
[6]
Online Segmented Beamforming via Dynamic Programming
M. Mittal, R. M. Corey, D. Cuji, J. R. Buck, and A. C. Singer, “Online segmented beamforming via dynamic programming,”arXiv preprint arXiv:2605.08554, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[7]
Online segmented recursive least squares (osrls),
J. W. Choi, J. Ludwig, and A. Singer, “Online segmented recursive least squares (osrls),” in2021 55th Asilomar Conference on Signals, Systems, and Computers, 2021, pp. 1330–1334
2021
-
[8]
A consol- idated perspective on multimicrophone speech enhancement and source separation,
S. Gannot, E. Vincent, S. Markovich-Golan, and A. Ozerov, “A consol- idated perspective on multimicrophone speech enhancement and source separation,”IEEE/ACM Transactions on Audio, Speech, and Language Processing, vol. 25, no. 4, pp. 692–730, 2017
2017
-
[9]
Universal prediction of indi- vidual sequences,
M. Feder, N. Merhav, and M. Gutman, “Universal prediction of indi- vidual sequences,”IEEE transactions on Information Theory, vol. 38, no. 4, pp. 1258–1270, 2002
2002
-
[10]
Universal switching linear least squares prediction,
S. S. Kozat and A. C. Singer, “Universal switching linear least squares prediction,”IEEE Transactions on Signal Processing, vol. 56, no. 1, pp. 189–204, 2008
2008
-
[11]
Cesa-Bianchi and G
N. Cesa-Bianchi and G. Lugosi,Prediction, learning, and games. Cambridge university press, 2006
2006
-
[12]
Stochastic complexity and modeling,
J. Rissanen, “Stochastic complexity and modeling,”The annals of statistics, pp. 1080–1100, 1986
1986
-
[13]
Adaptive Diagonal Loading using Krylov Subspaces for Robust Beamforming
M. Mittal, R. M. Corey, J. R. Buck, and A. C. Singer, “Adaptive diagonal loading using krylov subspaces for robust beamforming,”arXiv preprint arXiv:2605.11286, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[14]
Massive distributed microphone array dataset,
R. M. Corey, M. D. Skarha, and A. C. Singer, “Massive distributed microphone array dataset,” 2019. [Online]. Available: doi.org/10.13012/B2IDB-6216881 V1
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.