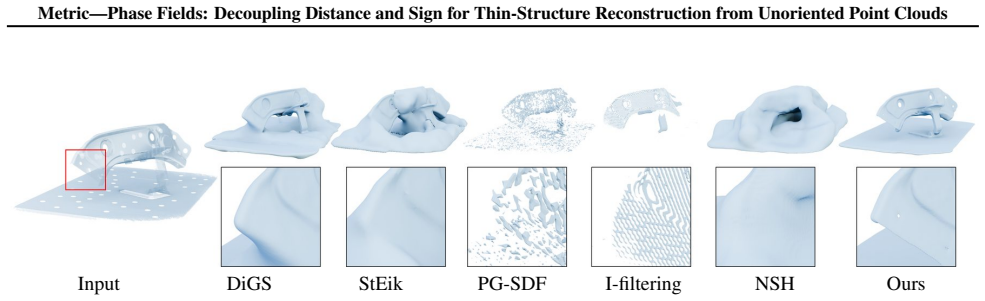
Metric--Phase Fields: Decoupling Distance and Sign for Thin-Structure Reconstruction from Unoriented Point Clouds
Pith reviewed 2026-06-29 22:27 UTC · model grok-4.3
The pith
Metric-phase fields decouple unsigned distance from a learnable phase to reconstruct thin structures from unoriented point clouds.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
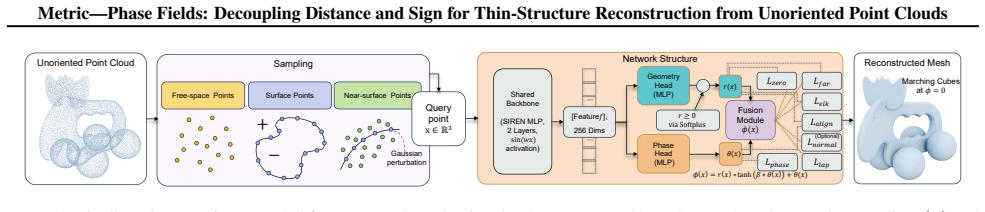
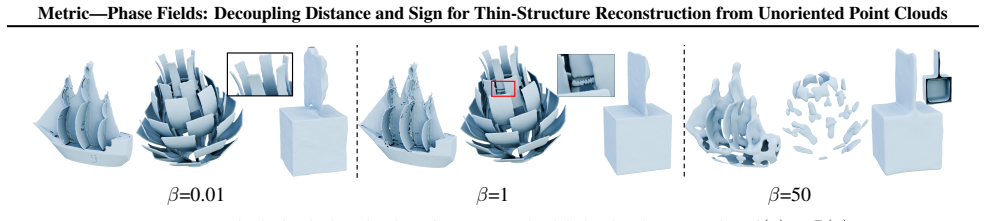
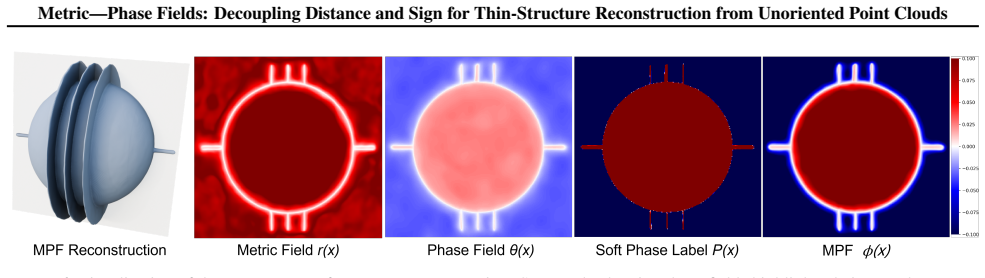
Given an unoriented point cloud, Metric-Phase Fields learn an unsigned metric field r together with a smooth phase field θ; a bounded indicator P = tanh(βθ) with learnable β supplies soft sign cues, and the fields are coupled by a gated-metric formulation with residual phase injection to yield a signed implicit function whose gradients remain well-behaved near the surface, allowing faithful reconstruction of thin and open geometry.
What carries the argument
The metric-phase field pair (unsigned metric r, phase θ) coupled by gated-metric formulation and residual phase injection, with soft indicator P = tanh(βθ).
If this is right
- Thin-shell and thin-plate geometries can be reconstructed without requiring watertight topology or suffering zero-level gradient collapse.
- Surface extraction becomes more reliable because near-surface gradients stay non-singular.
- Training converges more stably than with pure unsigned distance fields because the phase term supplies usable sign information.
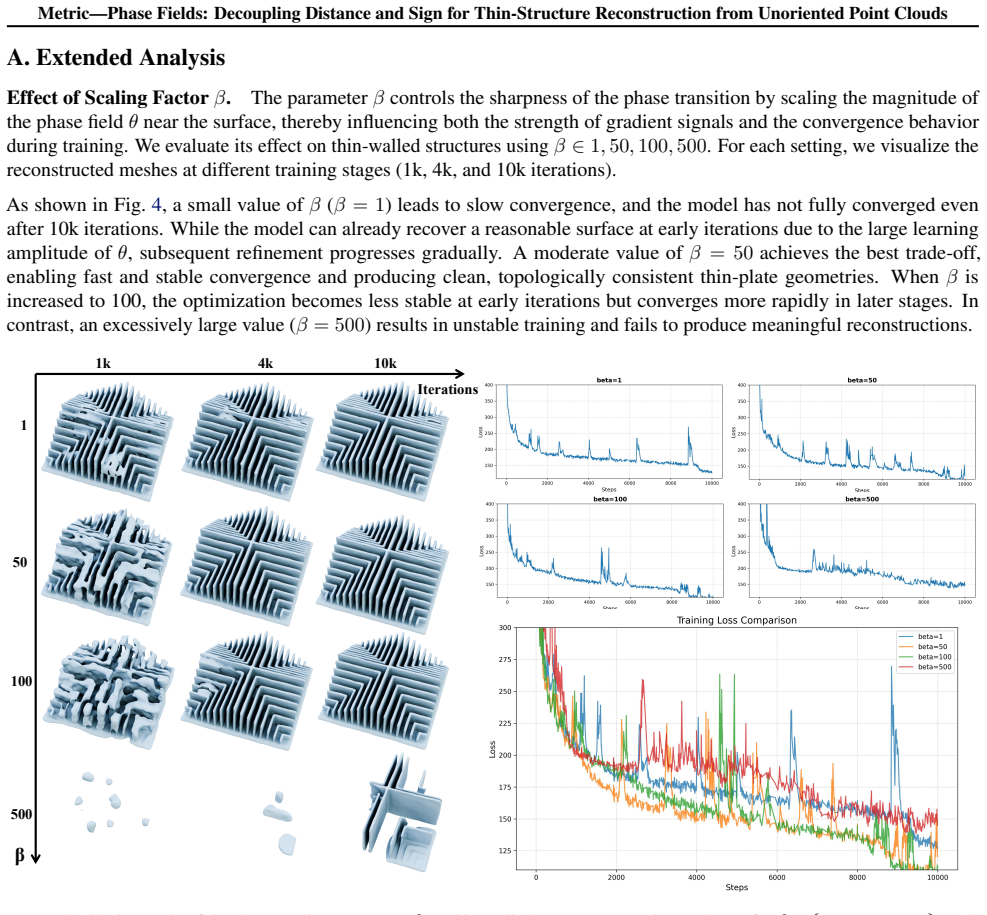
- The learnable β automatically adjusts the sharpness of the phase transition to the local geometry.
Where Pith is reading between the lines
- The same separation may allow hybrid representations that switch between metric and phase cues depending on local topology.
- Because the phase field is smooth and independent, it could be transferred across different point-cloud densities without retraining the metric component.
- The formulation suggests a route to layered reconstruction where multiple phase transitions are stacked inside a single metric field.
Load-bearing premise
A smooth phase field can be learned from unoriented points and stably coupled to the metric field via gated-metric formulation and residual injection without introducing optimization instabilities or extraction artifacts.
What would settle it
Train the model on a dataset of closely spaced parallel thin plates; if the extracted surfaces merge across the gap or if gradients vanish at the zero level set, the decoupling claim does not hold.
Figures
read the original abstract
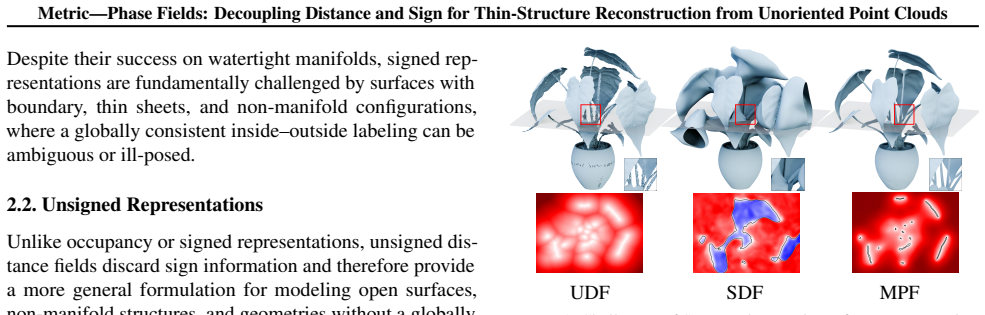
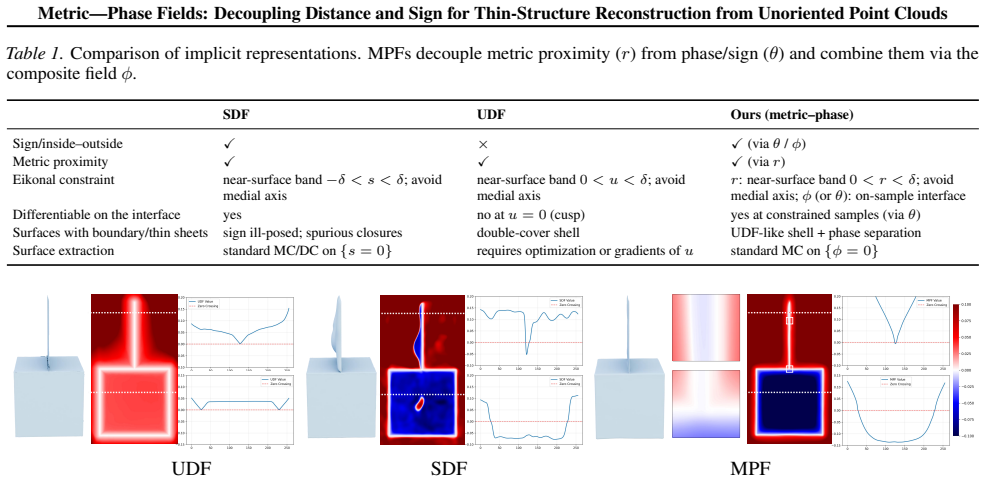
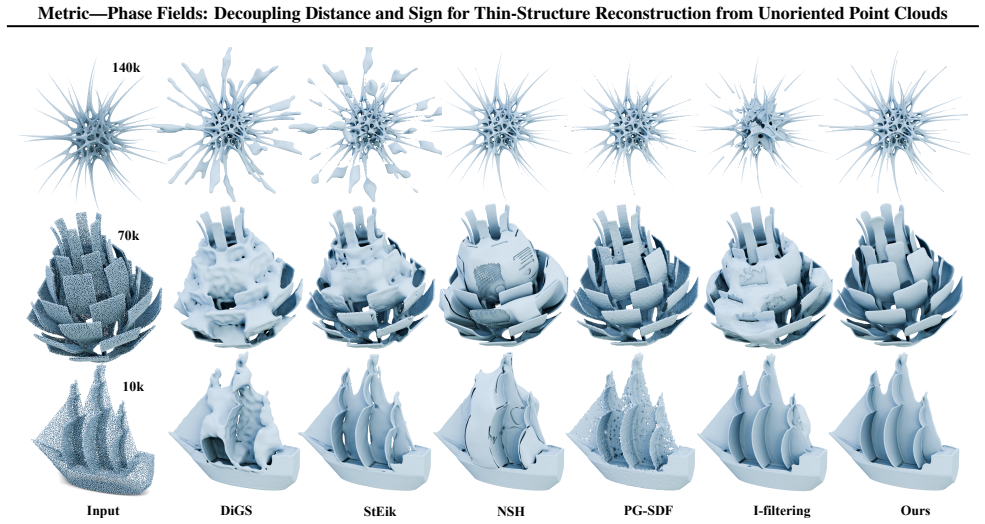
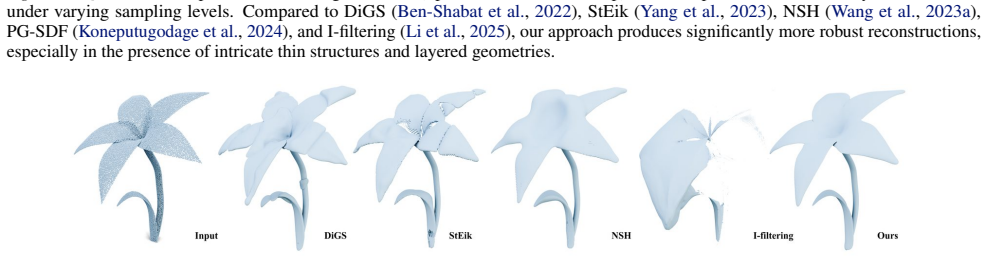
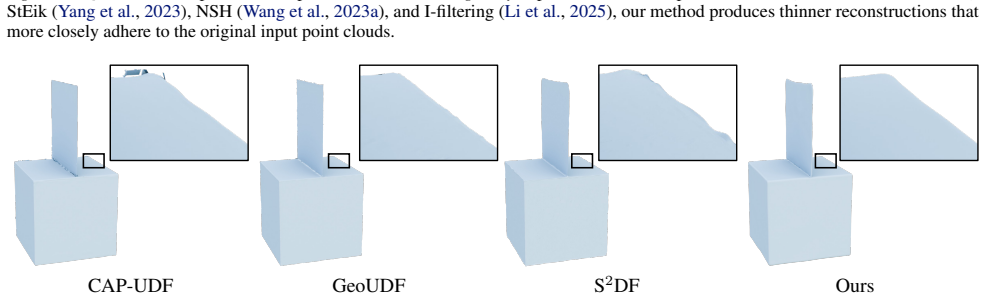
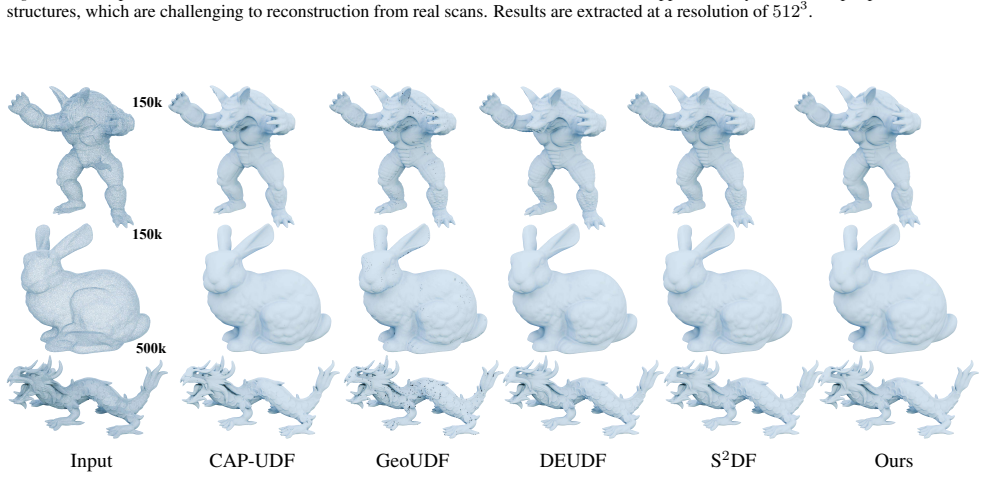
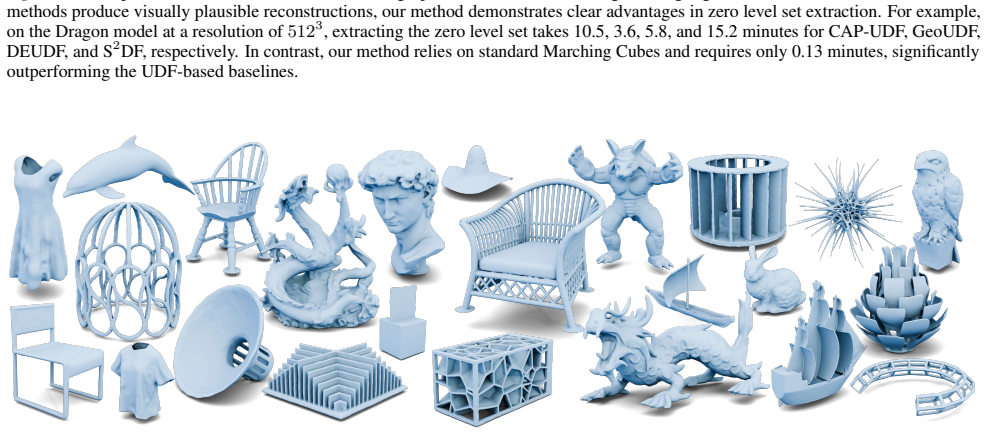
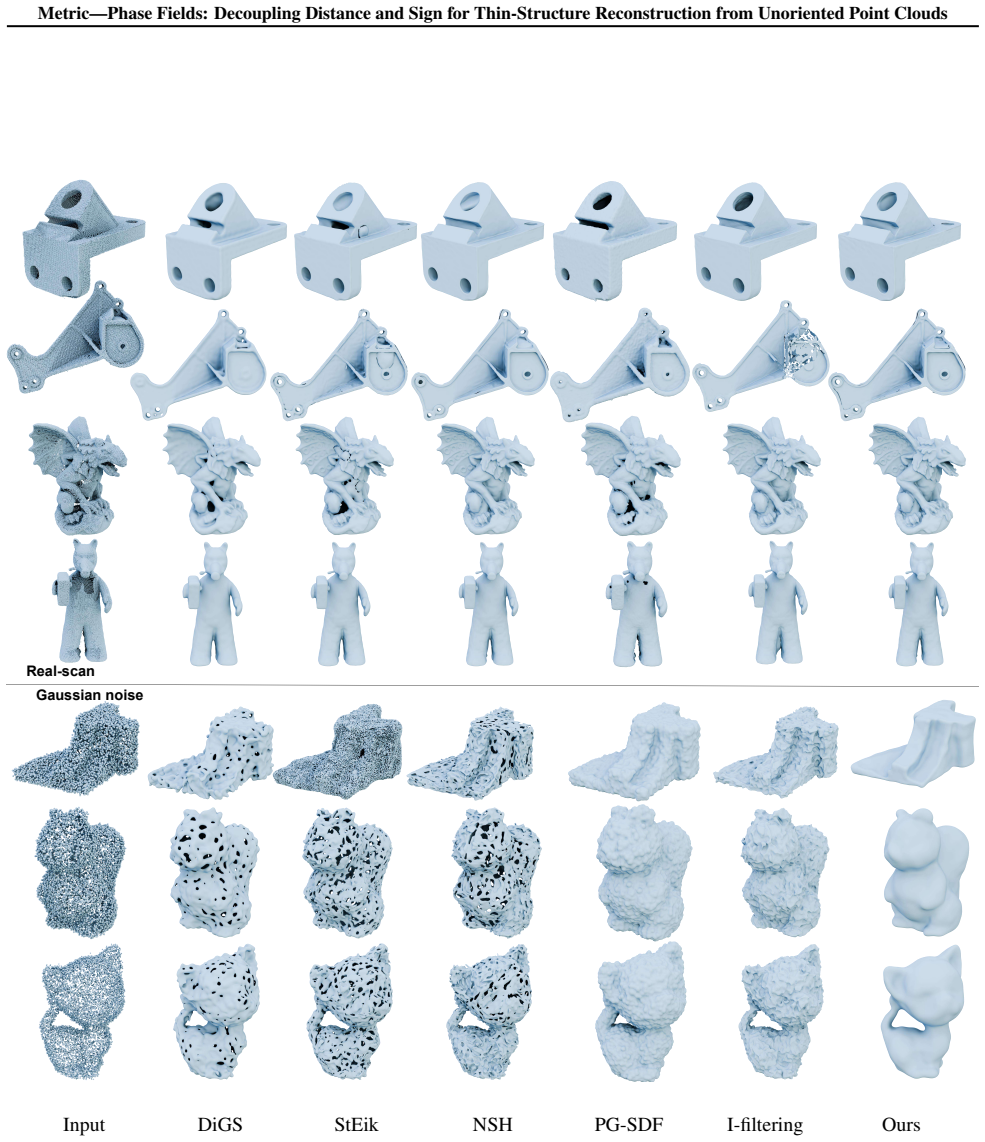
Neural Signed Distance Functions (SDFs) excel at reconstructing watertight manifolds but fail on thin structures and open boundaries due to strict inside--outside constraints. Conversely, Unsigned Distance Fields (UDFs) accommodate general geometries but suffer from gradient singularities at the zero-level set, hindering optimization and extraction. We introduce Metric--Phase Fields (MPFs), a decoupled implicit representation that separates metric proximity from topological phase. Given an unoriented point cloud, MPFs learn (i) an unsigned metric field $r$ and (ii) a smooth phase field $\theta$, for which we derive a bounded phase indicator $P=\tanh(\beta\theta)$ that provides soft inside--outside cues where they are meaningful. We couple the two fields via a gated-metric formulation with a residual phase injection to obtain a signed implicit function with stable near-surface gradients. The phase coefficient $\beta$ is learnable, allowing MPFs to adaptively control the sharpness of the phase transition and the degree of saturation of the soft sign indicator. Experiments on both synthetic and scanned thin-shell and thin-plate shapes demonstrate that MPFs preserve thin and layered structures more faithfully than recent SDF-based methods, while also enabling more robust training and more reliable surface extraction than UDF-based approaches. Check out \href{https://github.com/JIAYI-Scarlett/ICML2026-MPF}{MPFs-GitHub} for source code and test models.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces Metric-Phase Fields (MPFs) as a decoupled implicit representation for thin-structure reconstruction from unoriented point clouds. It learns an unsigned metric field r together with a smooth phase field θ, defines a bounded phase indicator P = tanh(βθ) with learnable β, and couples the fields through a gated-metric formulation plus residual phase injection to produce a signed implicit whose near-surface gradients remain stable. Experiments on synthetic and scanned thin-shell and thin-plate shapes are claimed to show superior preservation of thin and layered structures relative to SDF methods and more robust training/extraction relative to UDF methods.
Significance. If the gated-metric coupling and residual injection can be shown to produce stable gradients without forcing β to extremes or introducing extraction artifacts, the approach would address a recognized limitation of both SDFs (inability to handle open boundaries and thin structures) and UDFs (gradient singularities at the zero level set). A parameter-light, learnable phase that supplies soft sign cues only where meaningful could become a useful primitive for general-geometry implicit reconstruction.
major comments (3)
- [Abstract] Abstract: the central experimental claim—that MPFs “preserve thin and layered structures more faithfully than recent SDF-based methods” and enable “more robust training and more reliable surface extraction than UDF-based approaches”—is stated without any quantitative metrics, baselines, error tables, or training-protocol details. This absence makes the headline superiority assertion unverifiable from the manuscript as presented.
- [Abstract] Abstract (and the description of the phase indicator): P is defined directly as tanh(βθ) with β learnable. Without an explicit loss term or derivation showing that smoothness of θ is enforced away from the surface and that the gate does not collapse when local sign information is absent (thin shells, open boundaries, layered plates), it remains unclear whether reported advantages arise from the architectural decoupling or simply from adaptive fitting of β.
- [Abstract] The gated-metric formulation with residual phase injection is presented as the mechanism that yields stable near-surface gradients. No equation or ablation is supplied that quantifies gradient behavior (e.g., norm histograms or condition numbers) under the proposed coupling, leaving the “stable gradients” and “more reliable extraction” claims without direct supporting evidence.
minor comments (1)
- [Abstract] The GitHub link is given but no statement is made about code release, reproducibility package, or whether the reported experiments can be rerun from the supplied models.
Simulated Author's Rebuttal
We thank the referee for the constructive critique. We address each major comment below. Revisions will be made to strengthen the abstract and clarify the supporting derivations and evidence in the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central experimental claim—that MPFs “preserve thin and layered structures more faithfully than recent SDF-based methods” and enable “more robust training and more reliable surface extraction than UDF-based approaches”—is stated without any quantitative metrics, baselines, error tables, or training-protocol details. This absence makes the headline superiority assertion unverifiable from the manuscript as presented.
Authors: The abstract is intentionally concise and summarizes results whose quantitative details (error tables, baselines, Chamfer distances, training protocols) appear in Section 5 and the supplementary material. We agree the abstract would benefit from one or two key metrics; we will revise it to include representative quantitative figures while remaining within length limits. revision: yes
-
Referee: [Abstract] Abstract (and the description of the phase indicator): P is defined directly as tanh(βθ) with β learnable. Without an explicit loss term or derivation showing that smoothness of θ is enforced away from the surface and that the gate does not collapse when local sign information is absent (thin shells, open boundaries, layered plates), it remains unclear whether reported advantages arise from the architectural decoupling or simply from adaptive fitting of β.
Authors: Section 3.2 derives the phase indicator and Section 4.1 specifies the loss terms (including the smoothness regularizer on θ away from the surface and the gated coupling that prevents collapse on open or thin regions). We will move the derivation of the loss and the non-collapse argument into the main text (currently in the supplement) and add a short paragraph clarifying why adaptive β alone cannot explain the observed behavior. revision: yes
-
Referee: [Abstract] The gated-metric formulation with residual phase injection is presented as the mechanism that yields stable near-surface gradients. No equation or ablation is supplied that quantifies gradient behavior (e.g., norm histograms or condition numbers) under the proposed coupling, leaving the “stable gradients” and “more reliable extraction” claims without direct supporting evidence.
Authors: The gated-metric equation and residual injection appear in Eq. (7)–(9); an ablation on gradient norms is reported in the supplement (Figure S3). We acknowledge the main text would be stronger with a brief main-paper quantification; we will add a short paragraph and a compact gradient-norm plot to Section 4.3. revision: partial
Circularity Check
No significant circularity; proposal is self-contained with empirical validation
full rationale
The paper introduces MPFs as a new decoupled representation (unsigned metric r plus phase field θ, with P = tanh(βθ) and gated coupling), where β is explicitly learnable. No derivation chain reduces a claimed result to its own inputs by construction, no self-citations are load-bearing, and no fitted parameter is relabeled as an independent prediction. Central claims rest on experiments comparing reconstruction fidelity, training robustness, and extraction reliability against SDF/UDF baselines on synthetic and scanned data. The formulation is presented as a modeling choice with stated advantages, not as a theorem forced by prior self-work or definitional equivalence. This is the normal case of a non-circular technical proposal.
Axiom & Free-Parameter Ledger
free parameters (1)
- β
axioms (1)
- standard math tanh provides a bounded soft inside-outside indicator
invented entities (1)
-
Metric-Phase Field
no independent evidence
Reference graph
Works this paper leans on
-
[1]
write newline
" write newline "" before.all 'output.state := FUNCTION n.dashify 't := "" t empty not t #1 #1 substring "-" = t #1 #2 substring "--" = not "--" * t #2 global.max substring 't := t #1 #1 substring "-" = "-" * t #2 global.max substring 't := while if t #1 #1 substring * t #2 global.max substring 't := if while FUNCTION format.date year duplicate empty "emp...
-
[2]
H., and Gould, S
Ben-Shabat, Y., Koneputugodage, C. H., and Gould, S. Digs: Divergence guided shape implicit neural representation for unoriented point clouds. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, pp.\ 19323--19332, 2022
2022
-
[3]
M., Alliez, P., Guennebaud, G., Levine, J
Berger, M., Tagliasacchi, A., Seversky, L. M., Alliez, P., Guennebaud, G., Levine, J. A., Sharf, A., and Silva, C. T. A survey of surface reconstruction from point clouds. Comput. Graph. Forum, pp.\ 301–329, January 2017
2017
-
[4]
and Marlet, R
Boulch, A. and Marlet, R. Poco: Point convolution for surface reconstruction. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2022
2022
-
[5]
C., Beatson, R
Carr, J. C., Beatson, R. K., Cherrie, J. B., Mitchell, T. J., Fright, W. R., McCallum, B. C., and Evans, T. R. Reconstruction and representation of 3d objects with radial basis functions. In Proceedings of the 28th Annual Conference on Computer Graphics and Interactive Techniques, SIGGRAPH '01, pp.\ 67–76, New York, NY, USA, 2001
2001
-
[6]
ShapeNet: An Information-Rich 3D Model Repository
Chang, A. X., Funkhouser, T., Guibas, L., Hanrahan, P., Huang, Q., Li, Z., Savarese, S., Savva, M., Song, S., Su, H., et al. Shapenet: An information-rich 3d model repository. arXiv preprint arXiv:1512.03012, 2015
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[7]
MIND : Material interface generation from UDF s for non-manifold surface reconstruction
Chen, X., Hou, F., Wang, W., Qin, H., and He, Y. MIND : Material interface generation from UDF s for non-manifold surface reconstruction. In The Thirty-ninth Annual Conference on Neural Information Processing Systems, 2025 a . URL https://openreview.net/forum?id=4lR9OhAisI
2025
-
[8]
Dcudf2: Improving efficiency and accuracy in extracting zero level sets from unsigned distance fields
Chen, X., Yu, F., Hou, F., Wang, W., Zhang, Z., and He, Y. Dcudf2: Improving efficiency and accuracy in extracting zero level sets from unsigned distance fields. IEEE Transactions on Visualization and Computer Graphics, 31 0 (10): 0 9052--9065, 2025 b
2025
-
[9]
Neural unsigned distance fields for implicit function learning
Chibane, J., Mir, A., and Pons-Moll, G. Neural unsigned distance fields for implicit function learning. In Advances in Neural Information Processing Systems ( NeurIPS ) , 2020
2020
-
[10]
X., Savva, M., Halber, M., Funkhouser, T., and Nie ner, M
Dai, A., Chang, A. X., Savva, M., Halber, M., Funkhouser, T., and Nie ner, M. Scannet: Richly-annotated 3d reconstructions of indoor scenes. In Proceedings of the IEEE conference on computer vision and pattern recognition, pp.\ 5828--5839, 2017
2017
-
[11]
Dong, Q., Xu, R., Wang, P., Chen, S., Xin, S., Jia, X., Wang, W., and Tu, C. Neurcadrecon: Neural representation for reconstructing cad surfaces by enforcing zero gaussian curvature. ACM Transactions on Graphics, 43 0 (4), July 2024. doi:10.1145/3658171
-
[12]
J., and Wimmer, M
Erler, P., Guerrero, P., Ohrhallinger, S., Mitra, N. J., and Wimmer, M. Points2surf learning implicit surfaces from point clouds. In European conference on computer vision, pp.\ 108--124. Springer, 2020
2020
-
[13]
Dudf: Differentiable unsigned distance fields with hyperbolic scaling
Fainstein, M., Siless, V., and Iarussi, E. Dudf: Differentiable unsigned distance fields with hyperbolic scaling. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pp.\ 4484--4493, June 2024
2024
-
[14]
Meshudf: Fast and differentiable meshing of unsigned distance field networks
Guillard, B., Stella, F., and Fua, P. Meshudf: Fast and differentiable meshing of unsigned distance field networks. In European Conference on Computer Vision, 2022
2022
-
[15]
Surface reconstruction from unorganized points
Hoppe, H., DeRose, T., Duchamp, T., McDonald, J., and Stuetzle, W. Surface reconstruction from unorganized points. In Proceedings of the 19th Annual Conference on Computer Graphics and Interactive Techniques, SIGGRAPH '92, pp.\ 71–78, New York, NY, USA, 1992
1992
-
[16]
Iterative poisson surface reconstruction (ipsr) for unoriented points
Hou, F., Wang, C., Wang, W., Qin, H., Qian, C., and He, Y. Iterative poisson surface reconstruction (ipsr) for unoriented points. ACM Trans. Graph., 41 0 (4), 2022
2022
-
[17]
Robust zero level-set extraction from unsigned distance fields based on double covering
Hou, F., Chen, X., Wang, W., Qin, H., and He, Y. Robust zero level-set extraction from unsigned distance fields based on double covering. ACM Trans. Graph., 42 0 (6), December 2023. ISSN 0730-0301. doi:10.1145/3618314. URL https://doi.org/10.1145/3618314
-
[18]
A lightweight UDF learning framework for 3d reconstruction based on local shape functions
Hu, J., Li, Y., Hou, F., Hou, J., Zhang, Z., Wang, S., Lei, N., and He, Y. A lightweight UDF learning framework for 3d reconstruction based on local shape functions. In IEEE/CVF Conference on Computer Vision and Pattern Recognition, CVPR 2025, Nashville, TN, USA, June 11-15, 2025 , pp.\ 1297--1307, 2025
2025
-
[19]
Variational implicit point set surfaces
Huang, Z., Carr, N., and Ju, T. Variational implicit point set surfaces. ACM Trans. Graph. , 38 0 (4): 0 124:1--124:13, 2019
2019
-
[20]
Surface reconstruction from point clouds: A survey and a benchmark
Huang, Z., Wen, Y., Wang, Z., Ren, J., and Jia, K. Surface reconstruction from point clouds: A survey and a benchmark. IEEE transactions on pattern analysis and machine intelligence, 2024
2024
-
[21]
Robust inside-outside segmentation using generalized winding numbers
Jacobson, A., Kavan, L., and Sorkine-Hornung, O. Robust inside-outside segmentation using generalized winding numbers. ACM Trans. Graph., 32 0 (4), 2013
2013
-
[22]
Ju, T., Losasso, F., Schaefer, S., and Warren, J. Dual contouring of hermite data. ACM Trans. Graph., 21 0 (3): 0 339–346, July 2002. ISSN 0730-0301. doi:10.1145/566654.566586. URL https://doi.org/10.1145/566654.566586
-
[23]
and Hoppe, H
Kazhdan, M. and Hoppe, H. Screened poisson surface reconstruction. ACM Trans. Graph., 32 0 (3), 2013
2013
-
[24]
Poisson surface reconstruction
Kazhdan, M., Bolitho, M., and Hoppe, H. Poisson surface reconstruction. In Proceedings of the Fourth Eurographics Symposium on Geometry Processing, pp.\ 61–70, 2006
2006
-
[25]
H., Ben-Shabat, Y., Campbell, D., and Gould, S
Koneputugodage, C. H., Ben-Shabat, Y., Campbell, D., and Gould, S. Small steps and level sets: Fitting neural surface models with point guidance. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pp.\ 21456--21465, June 2024
2024
-
[26]
Voronoi-assisted diffusion for computing unsigned distance fields from unoriented points
Kong, J., Zong, C., Deng, J., Chen, X., Hou, F., Xin, S., Hou, J., Qian, C., and He, Y. Voronoi-assisted diffusion for computing unsigned distance fields from unoriented points. arXiv preprint arXiv:2510.12524, 2025
-
[27]
NeuralGF : Unsupervised point normal estimation by learning neural gradient function
Li, Q., Feng, H., Shi, K., Gao, Y., Fang, Y., Liu, Y.-S., and Han, Z. NeuralGF : Unsupervised point normal estimation by learning neural gradient function. In Thirty-seventh Conference on Neural Information Processing Systems (NeurIPS), 2023
2023
-
[28]
I-filtering: Implicit filtering for learning neural distance functions from 3d point clouds
Li, S., Liu, Y., Gao, G., Gu, M., and Liu, Y.-S. I-filtering: Implicit filtering for learning neural distance functions from 3d point clouds. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2025
2025
-
[29]
Fast and globally consistent normal orientation based on the winding number normal consistency
Lin, S., Shi, Z., and Liu, Y. Fast and globally consistent normal orientation based on the winding number normal consistency. ACM Trans. Graph., 43 0 (6), November 2024
2024
-
[30]
Consistent point orientation for manifold surfaces via boundary integration
Liu, W., Wang, X., Zhao, H., Xue, X., Wu, Z., Lu, X., and He, Y. Consistent point orientation for manifold surfaces via boundary integration. In ACM SIGGRAPH 2024 Conference Papers, SIGGRAPH '24, 2024
2024
-
[31]
Diffusing winding gradients (dwg): A parallel and scalable method for 3d reconstruction from unoriented point clouds
Liu, W., Li, J., Chen, X., Hou, F., Xin, S., Wang, X., Wu, Z., Qian, C., and He, Y. Diffusing winding gradients (dwg): A parallel and scalable method for 3d reconstruction from unoriented point clouds. ACM Trans. Graph., 44 0 (2), April 2025
2025
-
[32]
Lorensen, W. E. and Cline, H. E. Marching cubes: A high resolution 3d surface construction algorithm. In Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques, SIGGRAPH '87, pp.\ 163--169, 1987
1987
-
[33]
Unsigned orthogonal distance fields: An accurate neural implicit representation for diverse 3d shapes
Lu, Y., Wan, L., Ding, N., Wang, Y., Shen, S., Cai, S., and Gao, L. Unsigned orthogonal distance fields: An accurate neural implicit representation for diverse 3d shapes. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp.\ 20551--20560, 2024
2024
-
[34]
Neural-Pull: learning signed distance functions from point clouds by learning to pull space onto surfaces
Ma, B., Han, Z., Liu, Y., and Zwicker, M. Neural-Pull: learning signed distance functions from point clouds by learning to pull space onto surfaces. In Proceedings of the International Conference on Machine Learning (ICML), 2021
2021
-
[35]
Occupancy networks: Learning 3d reconstruction in function space
Mescheder, L., Oechsle, M., Niemeyer, M., Nowozin, S., and Geiger, A. Occupancy networks: Learning 3d reconstruction in function space. In Proceedings IEEE Conf. on Computer Vision and Pattern Recognition (CVPR), 2019
2019
-
[36]
M., Pollefeys, M., and Geiger, A
Peng, S., Niemeyer, M., Mescheder, L. M., Pollefeys, M., and Geiger, A. Convolutional occupancy networks. In European Conference on Computer Vision (ECCV), 2020
2020
-
[37]
Geoudf: Surface reconstruction from 3d point clouds via geometry-guided distance representation
Ren, S., Hou, J., Chen, X., He, Y., and Wang, W. Geoudf: Surface reconstruction from 3d point clouds via geometry-guided distance representation. In Proceedings of the IEEE/CVF International Conference on Computer Vision, pp.\ 14214--14224, 2023
2023
-
[38]
Neural-singular-hessian: Implicit neural representation of unoriented point clouds by enforcing singular hessian
Wang, Z., Zhang, Y., Xu, R., Zhang, F., Wang, P.-S., Chen, S., Xin, S., Wang, W., and Tu, C. Neural-singular-hessian: Implicit neural representation of unoriented point clouds by enforcing singular hessian. ACM Trans. Graph., 42 0 (6), 2023 a
2023
-
[39]
J., Paschalidou, D., You, S., Wetzstein, G., Guibas, L., and Kadambi, A
Wang, Z., Zhou, S., Park, J. J., Paschalidou, D., You, S., Wetzstein, G., Guibas, L., and Kadambi, A. Alto: Alternating latent topologies for implicit 3d reconstruction. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp.\ 259--270, 2023 b
2023
-
[40]
Deep geometric prior for surface reconstruction
Williams, F., Schneider, T., Silva, C., Zorin, D., Bruna, J., and Panozzo, D. Deep geometric prior for surface reconstruction. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, pp.\ 10130--10139, 2019
2019
-
[41]
Details enhancement in unsigned distance field learning for high-fidelity 3d surface reconstruction
Xu, C., Hou, F., Wang, W., Qin, H., Zhang, Z., and He, Y. Details enhancement in unsigned distance field learning for high-fidelity 3d surface reconstruction. In Proc. of AAAI, 2025
2025
-
[42]
Globally consistent normal orientation for point clouds by regularizing the winding-number field
Xu, R., Dou, Z., Wang, N., Xin, S., Chen, S., Jiang, M., Guo, X., Wang, W., and Tu, C. Globally consistent normal orientation for point clouds by regularizing the winding-number field. ACM Trans. Graph., 42 0 (4), 2023
2023
-
[43]
Monge-ampere regularization for learning arbitrary shapes from point clouds
Yang, C., Zhou, Y., Wei, G., Ma, L., Hou, J., Liu, Y., and Wang, W. Monge-ampere regularization for learning arbitrary shapes from point clouds. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2025
2025
-
[44]
Steik: Stabilizing the optimization of neural signed distance functions and finer shape representation
Yang, H., Sun, Y., Sundaramoorthi, G., and Yezzi, A. Steik: Stabilizing the optimization of neural signed distance functions and finer shape representation. Advances in neural information processing systems, 36: 0 13993--14004, 2023
2023
-
[45]
Surface extraction from neural unsigned distance fields
Zhang, C., Lin, G., Yang, L., Li, X., Komura, T., Schaefer, S., Keyser, J., and Wang, W. Surface extraction from neural unsigned distance fields. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), pp.\ 0000--0000, October 2023
2023
-
[46]
Learning a more continuous zero level set in unsigned distance fields through level set projection
Zhou, J., Ma, B., Li, S., Liu, Y.-S., and Han, Z. Learning a more continuous zero level set in unsigned distance fields through level set projection. 2023 IEEE/CVF International Conference on Computer Vision (ICCV), pp.\ 3158--3169, 2023
2023
-
[47]
Cap-udf: Learning unsigned distance functions progressively from raw point clouds with consistency-aware field optimization
Zhou, J., Ma, B., Li, S., Liu, Y.-S., Fang, Y., and Han, Z. Cap-udf: Learning unsigned distance functions progressively from raw point clouds with consistency-aware field optimization. IEEE Transactions on Pattern Analysis and Machine Intelligence, 46 0 (12): 0 7475--7492, 2024
2024
-
[48]
Thingi10K: A Dataset of 10,000 3D-Printing Models
Zhou, Q. and Jacobson, A. Thingi10k: A dataset of 10,000 3d-printing models. arXiv preprint arXiv:1605.04797, 2016
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[49]
and Koltun, V
Zhou, Q.-Y. and Koltun, V. Dense scene reconstruction with points of interest. ACM Trans. Graph., 32 0 (4), July 2013
2013
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.