Location Prior Generation via Multi-Source Urban Data Fusion for Low-Altitude Air Mobility
Pith reviewed 2026-06-29 22:17 UTC · model grok-4.3
The pith
Multi-source fusion of public urban data generates building height priors with a worst-case error of 5.5 meters.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
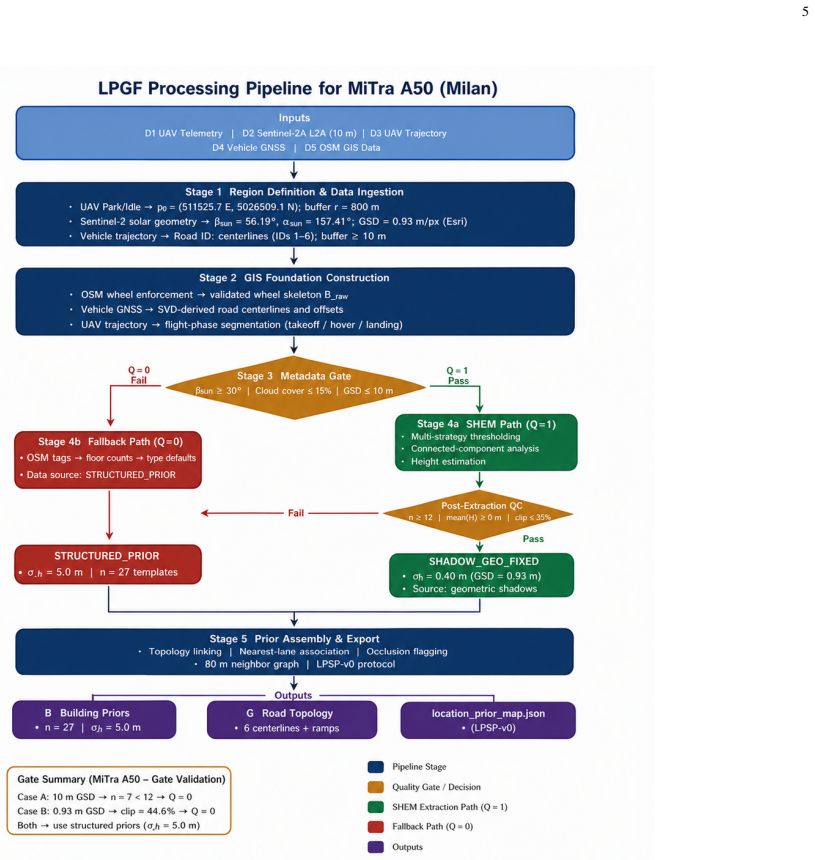
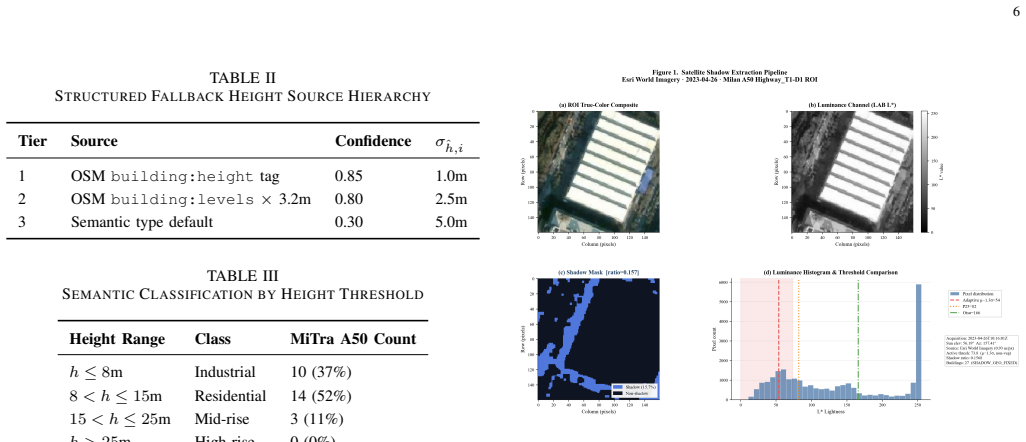
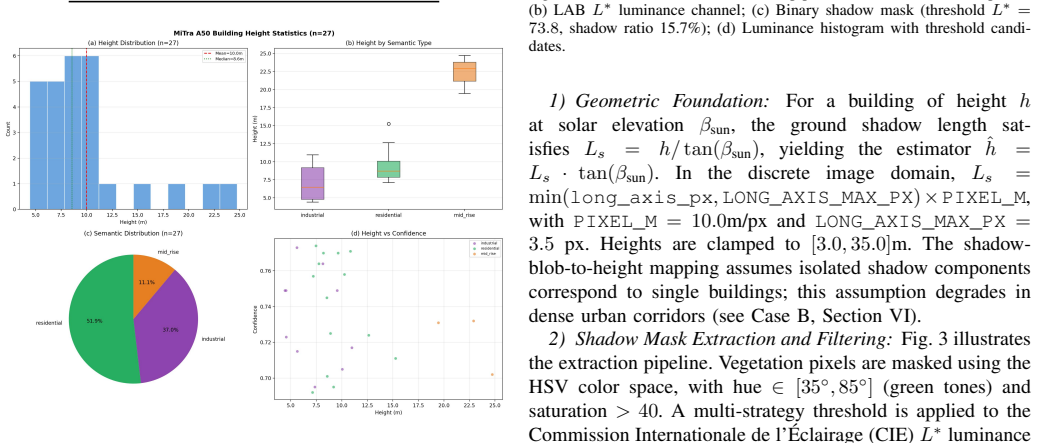
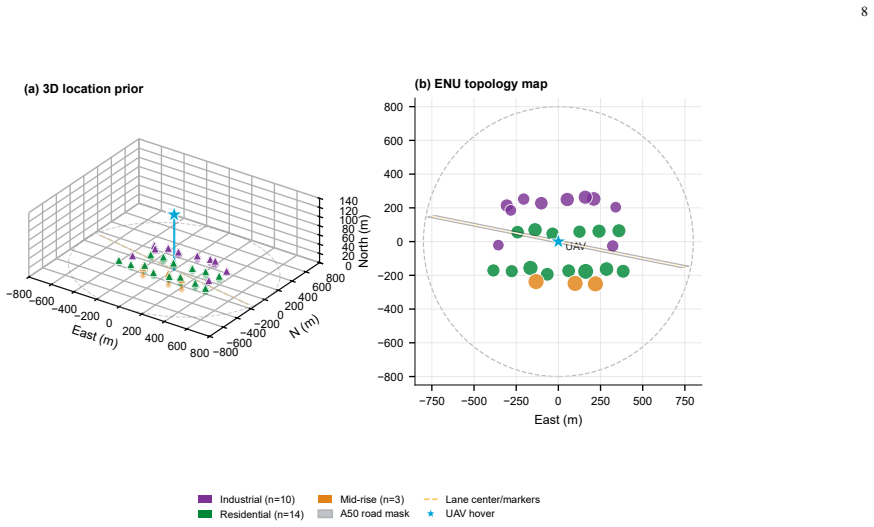
The Location Prior Generation Framework (LPGF) fuses Sentinel-2 imagery, UAV telemetry, vehicle GPS trajectories, and OpenStreetMap footprints into structured, reusable urban location priors. It assigns building heights through a three-tier priority hierarchy yielding a worst-case error of approximately 5.5 m, with an optional shadow-based height estimation module activated only when a four-criterion quality gate is satisfied. On the MiTra A50 Milan dataset the gate correctly identified imaging failure modes at different ground sample distances, producing consistent priors, and tier-3 heights achieved a mean absolute error of 3.07 m against manual counts.
What carries the argument
The Location Prior Generation Framework (LPGF) with its three-tier height assignment hierarchy and four-criterion quality gate for the shadow-based height estimation module.
If this is right
- Over 95% of urban buildings can receive height estimates from publicly available data streams without proprietary sources.
- The quality gate routes the pipeline to fallback when sub-pixel shadows or ground shadow merging occur.
- Type-default heights provide a reliable fallback with mean absolute error of 3.07 m on validated buildings.
- Low-altitude platforms gain access to pre-computed 3D geometry for urban operations.
- Consistent priors result even from imagery with varying ground sample distances.
Where Pith is reading between the lines
- If deployed at scale the framework could enable city-wide 3D maps for drone navigation using only open datasets.
- Similar quality-gated fusion might be applied to estimate other missing urban attributes like roof slopes.
- A direct test would compare the generated priors against LiDAR measurements in additional cities to check generalization.
- The method opens the possibility of hybrid systems that combine these priors with onboard sensors for updated maps.
Load-bearing premise
The four-criterion quality gate reliably detects imaging failure modes such as sub-pixel shadows and ground shadow merging while the tier-3 type-default heights remain accurate within the 5.5 m bound in varied urban settings.
What would settle it
Observation of buildings where the quality gate passes yet the resulting heights differ by more than 5.5 m from ground-truth measurements, or where type-default heights exceed the bound outside the validated dataset.
Figures
read the original abstract
Building height, the third dimension (3D) of urban spatial data, is absent in over 95% of structures in global geospatial databases. For the emerging low-altitude economy, this data gap forces each aerial platform to rely on real-time onboard sensing rather than pre-computed 3D scene geometry. We present the Location Prior Generation Framework (LPGF), a multi-source data fusion pipeline that integrates Sentinel-2 imagery, UAV telemetry, vehicle GPS trajectories, and OpenStreetMap footprints into structured, reusable urban location priors. LPGF assigns building heights through a three-tier priority hierarchy: (1) explicit OSM height tags where available, (2) floor count multiplied by 3.2 m per story where recorded, and (3) building-type default heights otherwise, yielding a worst-case error of approximately 5.5 m. An optional shadow-based height estimation module (SHEM) is activated only when a four-criterion quality gate is satisfied; when any criterion fails, the pipeline routes to structured fallback. On the MiTra A50 Milan dataset, the quality gate correctly identified two imaging failure modes: sub-pixel shadows at 10 m GSD and ground shadow merging at 0.93 m GSD, producing a consistent 27-building prior in both cases. Tier 3 type-default heights were validated against manual floor counts (n=15), achieving MAE=3.07 m within the 5.0 m uncertainty bound. The framework demonstrates that structured, quality-gated fusion of universally available data streams can bootstrap 3D scene coverage for low-altitude urban operations.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to introduce the Location Prior Generation Framework (LPGF), a multi-source fusion pipeline integrating Sentinel-2 imagery, UAV telemetry, vehicle GPS trajectories, and OpenStreetMap footprints to generate reusable 3D building height priors for low-altitude urban air mobility. Heights follow a three-tier hierarchy (explicit OSM tags, floor count × 3.2 m, or type-default values with ~5.5 m worst-case error), with an optional shadow-based height estimation module (SHEM) activated only when a four-criterion quality gate passes; otherwise the pipeline falls back. On the MiTra A50 Milan dataset the gate is reported to correctly flag sub-pixel shadows (10 m GSD) and ground-shadow merging (0.93 m GSD), yielding a consistent 27-building prior in both cases, while tier-3 defaults achieve MAE = 3.07 m against manual counts on n = 15 buildings.
Significance. If the quality gate and tier-3 defaults prove reliable beyond the reported Milan case, the framework supplies a practical, low-cost bootstrap for 3D scene geometry using universally available data streams, directly addressing the >95 % missing-height gap in global geospatial databases. The explicit three-tier hierarchy, structured fallback, and concrete validation metrics (MAE, failure-mode detection counts) constitute clear strengths that would support deployment in low-altitude operations.
major comments (2)
- [Abstract] Abstract (validation paragraph): tier-3 type-default heights are validated with MAE = 3.07 m on only n = 15 buildings from the single MiTra A50 Milan dataset; this small sample and absence of cross-city testing is load-bearing for the claim that defaults remain inside the stated ~5.5 m worst-case bound across varied urban building stocks and OSM data quality.
- [Abstract] Abstract (quality-gate paragraph): correct detection of the two cited imaging failure modes is demonstrated solely for two GSD values on the Milan dataset; without additional datasets, larger samples, or explicit implementation details of the four criteria and their thresholds, the reliability of routing to fallback cannot be assessed and therefore undermines the central bootstrap claim.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and for recognizing the framework's potential to address the missing-height gap. We address the two major comments point-by-point below. We agree that the reported validation is limited in scope and will revise the manuscript accordingly to better qualify the claims and provide additional details.
read point-by-point responses
-
Referee: [Abstract] Abstract (validation paragraph): tier-3 type-default heights are validated with MAE = 3.07 m on only n = 15 buildings from the single MiTra A50 Milan dataset; this small sample and absence of cross-city testing is load-bearing for the claim that defaults remain inside the stated ~5.5 m worst-case bound across varied urban building stocks and OSM data quality.
Authors: We agree that the empirical validation of tier-3 defaults relies on a small sample (n=15) from a single city, which limits generalizability claims. The ~5.5 m worst-case bound is a conservative theoretical maximum derived from the default height assignment rules (maximum deviation assuming misclassification of building stories), not an empirical guarantee from this dataset. The MAE=3.07 m result is presented as an initial check that observed errors fall inside the bound for the tested buildings. In revision we will (1) qualify the abstract text to emphasize the preliminary nature of this validation, (2) add a limitations paragraph discussing the single-city scope and OSM data-quality variability, and (3) attempt to enlarge the validation set within the existing Milan data if further manual floor counts can be obtained. revision: partial
-
Referee: [Abstract] Abstract (quality-gate paragraph): correct detection of the two cited imaging failure modes is demonstrated solely for two GSD values on the Milan dataset; without additional datasets, larger samples, or explicit implementation details of the four criteria and their thresholds, the reliability of routing to fallback cannot be assessed and therefore undermines the central bootstrap claim.
Authors: The four quality-gate criteria and their exact thresholds are specified in Section 3.2 of the full manuscript. We will move a concise description of the criteria and thresholds into the abstract (or add a short methods summary box) so that the routing logic is self-contained. The two failure-mode demonstrations (sub-pixel shadows at 10 m GSD and ground-shadow merging at 0.93 m GSD) are presented as concrete examples of the gate operating as intended on the available imagery; we do not claim exhaustive coverage of all possible imaging conditions. While additional cities would strengthen the assessment, we currently have no further annotated multi-city datasets meeting the same requirements. revision: partial
- We do not currently have access to additional multi-city datasets with the necessary annotations to perform cross-city validation of the tier-3 defaults or quality gate.
Circularity Check
No circularity: derivation is direct data fusion and validation with no self-referential reductions
full rationale
The paper presents LPGF as a rule-based three-tier height assignment pipeline plus an optional shadow module gated by four explicit criteria. No equations, fitted parameters, or predictions are defined; tier-3 defaults and gate decisions are applied directly to input data sources (OSM, Sentinel-2, etc.) and then validated on held-out manual counts. The Milan results are empirical outputs, not quantities forced by construction from the same inputs. No self-citations appear in the provided text, and no uniqueness theorems or ansatzes are invoked. The central claim therefore rests on observable data processing rather than any definitional loop.
Axiom & Free-Parameter Ledger
free parameters (2)
- story height multiplier =
3.2 m
- type-default heights
axioms (2)
- domain assumption OSM footprints and occasional height or floor tags are sufficiently accurate to serve as the top two tiers.
- domain assumption Sentinel-2 imagery at stated GSD values can produce usable shadows only when the four quality criteria are met.
Reference graph
Works this paper leans on
-
[1]
OpenStreetMap Database,
OpenStreetMap Contributors, “OpenStreetMap Database,” 2024, [On- line]. Available: https://www.openstreetmap.org
2024
-
[2]
A spatio-temporal analysis investigating completeness and inequalities of global urban building data in OpenStreetMap,
B. Herfort, S. Lautenbach, J. P. de Albuquerque, J. Anderson, and A. Zipf, “A spatio-temporal analysis investigating completeness and inequalities of global urban building data in OpenStreetMap,”Nature Communications, vol. 14, p. 3985, 2023
2023
-
[3]
Emerging urban challenge: RPAS/UA Vs in cities,
L. Russell, R. Goubran, and F. Kwamena, “Emerging urban challenge: RPAS/UA Vs in cities,” inProc. 15th Int. Conf. Distrib. Comput. Sensor Syst. (DCOSS), 2019, pp. 546–553
2019
-
[4]
Age of information in UA V- assisted real-time IoT systems with obstacle avoidance,
X. Ma, B. Zhou, W. Wang, and Q. Wu, “Age of information in UA V- assisted real-time IoT systems with obstacle avoidance,” inProc. IEEE 23rd Int. Conf. Commun. Technol. (ICCT), 2023, pp. 1002–1007
2023
-
[5]
V osselman and H.-G
G. V osselman and H.-G. Maas,Airborne and Terrestrial Laser Scanning. Whittles Publishing, 2010
2010
-
[6]
‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications,
M. J. Westoby, J. Brasington, N. F. Glasser, M. J. Hambrey, and J. M. Reynolds, “‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications,”Geomorphology, vol. 179, pp. 300–314, 2012
2012
-
[7]
National-scale mapping of building height using Sentinel-1 and Sentinel-2 time series,
D. Frantz, F. Schug, A. Okujeni, C. Navacchi, W. Wagner, S. van der Linden, and P. Hostert, “National-scale mapping of building height using Sentinel-1 and Sentinel-2 time series,”Remote Sensing of Environment, vol. 252, p. 112128, 2021
2021
-
[8]
Building height esti- mation using shadow length in satellite imagery,
S. Chaudhry, M. Qureshi, S. Jabbar, and M. Taj, “Building height esti- mation using shadow length in satellite imagery,” 2024, arXiv preprint arXiv:2411.09411
-
[9]
Shadow detection and building- height estimation using IKONOS data,
Y . Shao, G. N. Taff, and S. J. Walsh, “Shadow detection and building- height estimation using IKONOS data,”Int. J. Remote Sens., vol. 32, no. 22, pp. 6929–6944, 2011
2011
-
[10]
Using shadows in high-resolution imagery to determine building height,
A. Comber, M. Umezaki, R. Zhou, Y . Ding, Y . Li, H. Fu, H. Jiang, and A. Tewkesbury, “Using shadows in high-resolution imagery to determine building height,”Remote Sens. Lett., vol. 3, no. 7, pp. 551–556, 2012
2012
-
[11]
Building height estimation from high resolution satellite images,
A. Rajji, A. Najine, A. Wafik, and A. Benmoussa, “Building height estimation from high resolution satellite images,”Int. J. Innov. Appl. Stud., vol. 35, no. 2, pp. 268–281, 2022
2022
-
[12]
Building detection in very high resolution multispectral data with deep learning features,
M. Vakalopoulou, K. Karantzalos, N. Komodakis, and N. Paragios, “Building detection in very high resolution multispectral data with deep learning features,” inProc. IEEE IGARSS, 2015, pp. 1873–1876
2015
-
[13]
Learning aerial image segmentation from online maps,
P. Kaiser, J. D. Wegner, A. Lucchi, M. Jaggi, T. Hofmann, and K. Schindler, “Learning aerial image segmentation from online maps,” IEEE Trans. Geosci. Remote Sens., vol. 55, no. 11, pp. 6054–6068, 2017
2017
-
[14]
Inferring road maps from GPS traces,
J. Biagioni and J. Eriksson, “Inferring road maps from GPS traces,” Transp. Res. Rec., vol. 2291, no. 1, pp. 61–71, 2012
2012
-
[15]
MiTra: A drone-based trajectory data for an all-traffic-state inclusive freeway with ramps,
A. A. Chaudhari, M. Treiber, and O. Okhrin, “MiTra: A drone-based trajectory data for an all-traffic-state inclusive freeway with ramps,” Scientific Data, vol. 12, p. 1174, 2025
2025
-
[16]
A GIS application for UA V flight planning,
M. Mangiameli, G. Muscato, G. Mussumeci, and C. Milazzo, “A GIS application for UA V flight planning,” inProc. 2nd IFAC Workshop RED- UAS, 2013, pp. 147–151
2013
-
[17]
Deep learning enabled semantic communication systems,
H. Xie, Z. Qin, G. Y . Li, and B. H. Juang, “Deep learning enabled semantic communication systems,”IEEE Trans. Signal Process., vol. 69, pp. 2663–2674, 2021
2021
-
[18]
Easy Access Rules for U-space,
EASA, “Easy Access Rules for U-space,” 2024, [Online]. Available: https://www.easa.europa.eu/en/document-library/easy-access-rules/ easy-access-rules-u-space
2024
-
[19]
Unmanned Aircraft Systems (UAS) Traffic Management (UTM) Concept of Operations v2.0,
FAA, “Unmanned Aircraft Systems (UAS) Traffic Management (UTM) Concept of Operations v2.0,” 2023, [Online]. Available: https://www. faa.gov/uas/research_development/traffic_management
2023
-
[20]
Data quality in Internet of Things: A state-of-the-art survey,
A. Karkouch, H. Mousannif, H. A. Moatassime, and T. Noel, “Data quality in Internet of Things: A state-of-the-art survey,”J. Netw. Comput. Appl., vol. 73, pp. 57–81, 2016
2016
-
[21]
Sentinel-2A Level-2A, Tile 32TNQ, 2023-04-26T10:16:01Z,
ESA, “Sentinel-2A Level-2A, Tile 32TNQ, 2023-04-26T10:16:01Z,” 2023, copernicus Open Access Hub
2023
-
[22]
How good is volunteered geographical information? A comparative study of OpenStreetMap and Ordnance Survey datasets,
M. Haklay, “How good is volunteered geographical information? A comparative study of OpenStreetMap and Ordnance Survey datasets,” Environ. Plann. B, vol. 37, no. 4, pp. 682–703, 2010
2010
-
[23]
Survey of advances in guidance, navigation, and control of unmanned rotorcraft systems,
F. Kendoul, “Survey of advances in guidance, navigation, and control of unmanned rotorcraft systems,”J. Field Robot., vol. 29, no. 2, pp. 315–378, 2012
2012
-
[24]
Semantic communications: Principles and challenges,
Z. Qin, X. Tao, J. Lu, and G. Y . Li, “Semantic communications: Principles and challenges,” 2022, arXiv preprint arXiv:2201.01389
-
[25]
Ap- plications of 3D city models: State of the art review,
F. Biljecki, J. Stoter, H. Ledoux, S. Zlatanova, and A. Coltekin, “Ap- plications of 3D city models: State of the art review,”ISPRS Int. J. Geo-Inf., vol. 4, no. 4, pp. 2842–2889, 2015. APPENDIX A. Schema Overview LPSP-v0 defines a standardized JSON exchange format. Each prior is self-describing, carrying provenance, quality, and uncertainty metadata. The...
2015
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.