Agent-Centric Social Trajectory Prediction: A Free Energy Principle Perspective
Pith reviewed 2026-06-29 21:20 UTC · model grok-4.3
The pith
FEP-Diff grounds trajectory prediction in the free energy principle to produce cognitively plausible forecasts from local observations alone.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
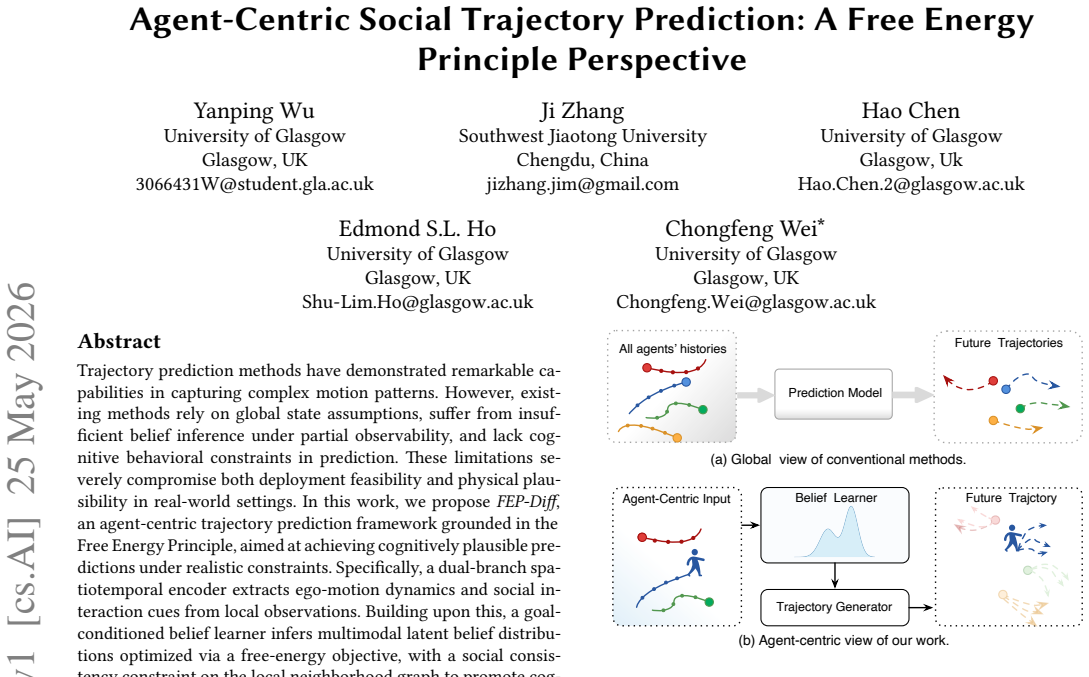
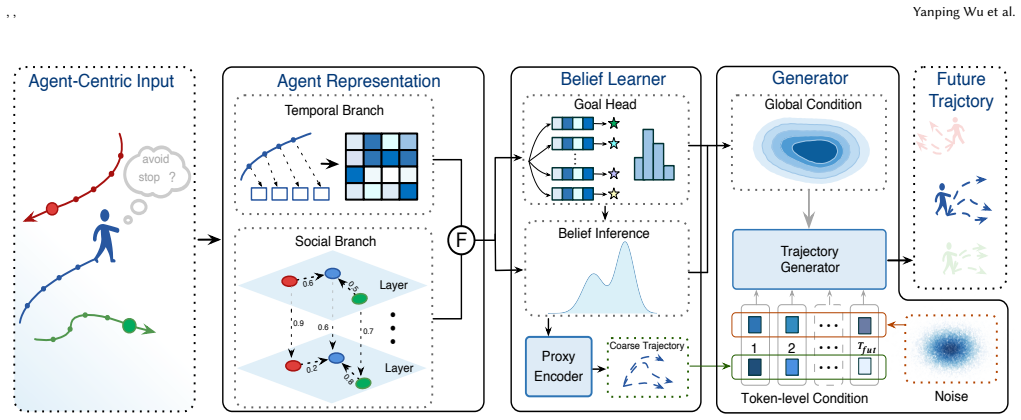
FEP-Diff is an agent-centric trajectory prediction framework grounded in the Free Energy Principle that extracts ego-motion and social cues via a dual-branch spatiotemporal encoder, infers multimodal latent belief distributions through a goal-conditioned learner optimized by a free-energy objective with social consistency constraint on the local neighborhood graph, and generates precise diverse futures via a residual diffusion trajectory generator with token-level proxy conditioning.
What carries the argument
Goal-conditioned belief learner that infers and optimizes latent beliefs via free-energy objective plus social consistency constraint on the neighborhood graph.
If this is right
- Predictions remain accurate even when global state information is unavailable.
- Social consistency among neighboring agents is enforced during belief inference.
- Generated trajectories exhibit greater diversity while respecting cognitive constraints.
- The framework supports deployment in settings with realistic partial observability.
Where Pith is reading between the lines
- The same belief-optimization structure could be tested on raw sensor streams from moving vehicles to check whether social consistency still improves accuracy.
- If the free-energy term is removed while keeping the encoder and generator, performance under restricted views should drop according to the paper's logic.
- The approach suggests that neuroscience-derived belief updating may transfer to other multi-agent forecasting tasks such as team sports or swarm robotics.
Load-bearing premise
Optimizing latent beliefs with a free-energy objective and social consistency constraint on the local graph produces predictions that are both more accurate and more cognitively aligned than methods without these components.
What would settle it
A controlled test on any of the five public benchmarks where FEP-Diff fails to exceed the accuracy of prior methods when each agent receives only its local neighborhood observations.
Figures
read the original abstract
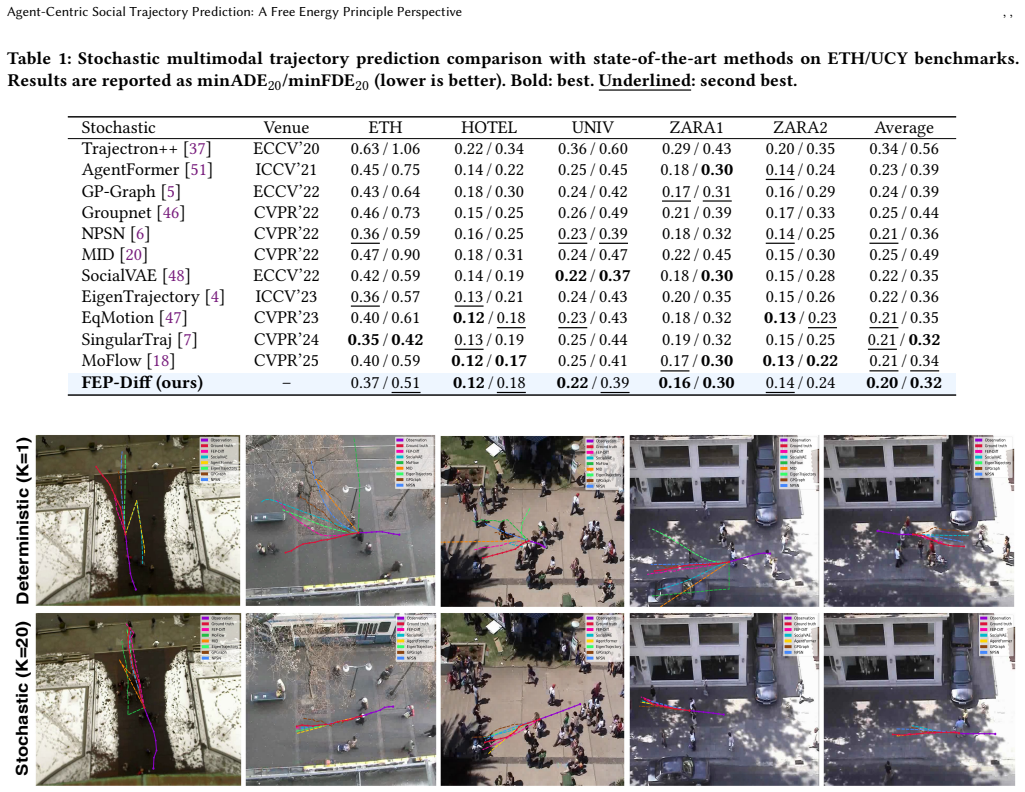
Trajectory prediction methods have demonstrated remarkable capabilities in capturing complex motion patterns. However, existing methods rely on global state assumptions, suffer from insufficient belief inference under partial observability, and lack cognitive behavioral constraints in prediction. These limitations severely compromise both deployment feasibility and physical plausibility in real-world settings. In this work, we propose FEP-Diff, an agent-centric trajectory prediction framework grounded in the Free Energy Principle, aimed at achieving cognitively plausible predictions under realistic constraints. Specifically, a dual-branch spatiotemporal encoder extracts ego-motion dynamics and social interaction cues from local observations. Building upon this, a goal-conditioned belief learner infers multimodal latent belief distributions optimized via a free-energy objective, with a social consistency constraint on the local neighborhood graph to promote cognitive alignment among neighboring agents. Finally, a residual diffusion trajectory generator is conditioned on the learned belief representations with token-level proxy conditioning, producing precise and diverse future predictions. Extensive experiments on five public benchmarks demonstrate that FEP-Diff consistently outperforms state-of-the-art methods under restricted observability. Code: https://anonymous.4open.science/r/FEP-Diff-8876.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes FEP-Diff, an agent-centric trajectory prediction model grounded in the Free Energy Principle. It consists of a dual-branch spatiotemporal encoder extracting ego-motion and social cues from local observations, a goal-conditioned belief learner whose multimodal latent beliefs are optimized via a free-energy objective together with a social consistency constraint on the local neighborhood graph, and a residual diffusion trajectory generator conditioned on the learned beliefs via token-level proxy conditioning. The central claim is that this yields cognitively plausible predictions that outperform state-of-the-art methods on five public benchmarks under restricted observability.
Significance. If the FEP grounding and performance claims hold after verification, the work would offer a principled active-inference approach to multi-agent prediction under partial observability, potentially improving robustness and cognitive alignment compared with purely data-driven baselines. The combination of variational belief optimization with diffusion-based generation is a non-trivial technical contribution that could influence both trajectory forecasting and cognitive modeling literatures.
major comments (2)
- [Abstract] Abstract: the social consistency constraint is described as added 'with' the free-energy objective 'to promote cognitive alignment'. If this term is an auxiliary regularizer on the neighborhood graph rather than a term arising inside the variational free-energy functional (e.g., from a joint generative model over neighboring agents), then measured gains cannot be attributed to the FEP component; this is load-bearing for the paper's central claim that FEP-Diff is 'grounded in the Free Energy Principle'.
- [Abstract] Abstract (and any experimental section): the claim of consistent outperformance on five benchmarks under restricted observability is stated without reference to specific metrics, baselines, error bars, ablation results, or observability protocols. Without these details the magnitude and robustness of the reported gains cannot be evaluated against the stated FEP-based mechanism.
minor comments (2)
- The anonymous code link should be replaced with a permanent repository upon acceptance to support reproducibility.
- Notation for the free-energy objective and the precise mathematical form of the social consistency constraint should be introduced with equation numbers in the methods section for clarity.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below with clarifications and proposed revisions where appropriate.
read point-by-point responses
-
Referee: [Abstract] Abstract: the social consistency constraint is described as added 'with' the free-energy objective 'to promote cognitive alignment'. If this term is an auxiliary regularizer on the neighborhood graph rather than a term arising inside the variational free-energy functional (e.g., from a joint generative model over neighboring agents), then measured gains cannot be attributed to the FEP component; this is load-bearing for the paper's central claim that FEP-Diff is 'grounded in the Free Energy Principle'.
Authors: The referee is correct that the manuscript describes the social consistency constraint as added 'with' the free-energy objective. In the current formulation, the goal-conditioned belief learner is optimized via the free-energy objective, while the social consistency constraint functions as an auxiliary regularizer applied to the local neighborhood graph. This term is motivated by FEP principles of social cognition and alignment but is not derived as an intrinsic component of the variational free-energy functional (e.g., via a joint generative model). We acknowledge that this distinction limits the extent to which performance gains can be attributed exclusively to the FEP component. We will revise the abstract and the method section to explicitly clarify the auxiliary nature of the constraint and its relationship to the FEP grounding. revision: yes
-
Referee: [Abstract] Abstract (and any experimental section): the claim of consistent outperformance on five benchmarks under restricted observability is stated without reference to specific metrics, baselines, error bars, ablation results, or observability protocols. Without these details the magnitude and robustness of the reported gains cannot be evaluated against the stated FEP-based mechanism.
Authors: Abstracts are concise summaries and conventionally omit exhaustive quantitative details. The full manuscript's experimental section reports results on five benchmarks with specific metrics, baseline comparisons, error bars, ablation studies, and explicit observability protocols under restricted settings. To address the concern, we will strengthen the experimental section by adding explicit analysis linking performance gains to the FEP-based belief learner and social consistency components. We will also consider adding one or two key quantitative highlights to the abstract if space allows under the venue constraints. revision: partial
Circularity Check
No significant circularity; derivation applies external FEP without reducing to self-inputs
full rationale
The paper applies the Free Energy Principle as an external optimization objective to a belief learner and adds a social consistency constraint on neighborhood graphs. No equations or claims reduce a 'prediction' to a fitted parameter by construction, nor does any load-bearing step rely on self-citation chains or imported uniqueness theorems. The central claims rest on empirical benchmark comparisons under restricted observability, which are falsifiable outside the model's fitted values. The social consistency term is presented as an addition 'to promote cognitive alignment' rather than derived inside the variational free-energy functional, but this is a modeling choice, not a definitional loop. No self-definitional, fitted-input-renamed-as-prediction, or ansatz-smuggled patterns appear in the provided text.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Ijaz Ahmed, Miswar Akhtar Syed, Muhammad Maaruf, and Muhammad Khalid
-
[2]
Computing 107, 1 (2025), 2
Distributed computing in multi-agent systems: a survey of decentralized machine learning approaches. Computing 107, 1 (2025), 2
2025
-
[3]
Alexandre Alahi, Kratarth Goel, Vignesh Ramanathan, Alexandre Robicquet, Li Fei-Fei, and Silvio Savarese. 2016. Social lstm: Human trajectory prediction in crowded spaces. In Proceedings of the IEEE conference on computer vision and pattern recognition. 961–971
2016
-
[4]
Inhwan Bae, Junoh Lee, and Hae-Gon Jeon. 2024. Can language beat numerical regression? language-based multimodal trajectory prediction. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition . 753–766
2024
-
[5]
Inhwan Bae, Jean Oh, and Hae-Gon Jeon. 2023. Eigentrajectory: Low-rank de- scriptors for multi-modal trajectory forecasting. In Proceedings of the IEEE/CVF International Conference on Computer Vision . 10017–10029
2023
-
[6]
Inhwan Bae, Jin-Hwi Park, and Hae-Gon Jeon. 2022. Learning pedestrian group representations for multi-modal trajectory prediction. In European Conference on Computer Vision . Springer, 270–289
2022
-
[7]
Inhwan Bae, Jin-Hwi Park, and Hae-Gon Jeon. 2022. Non-probability sam- pling network for stochastic human trajectory prediction. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition . 6477–6487
2022
-
[8]
Inhwan Bae, Young-Jae Park, and Hae-Gon Jeon. 2024. Singulartrajectory: Uni- versal trajectory predictor using diffusion model. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition . 17890–17901
2024
-
[9]
Mohammadhossein Bahari, Saeed Saadatnejad, Amirhossein Askari Farsangi, Seyed-Mohsen Moosavi-Dezfooli, and Alexandre Alahi. 2025. Certified human trajectory prediction. In Proceedings of the Computer Vision and Pattern Recogni- tion Conference. 12301–12311
2025
-
[10]
Guillem Capellera, Antonio Rubio, Luis Ferraz, and Antonio Agudo. 2025. Uni- fied uncertainty-aware diffusion for multi-agent trajectory modeling. In Proceed- ings of the Computer Vision and Pattern Recognition Conference . 22476–22486
2025
-
[11]
Kai Chen, Xiaodong Zhao, Yujie Huang, Guoyu Fang, Xiao Song, Ruiping Wang, and Ziyuan Wang. 2025. Socialmoif: Multi-order intention fusion for pedestrian trajectory prediction. In Proceedings of the Computer Vision and Pattern Recogni- tion Conference. 22465–22475
2025
-
[12]
Yujiao Cheng, Liting Sun, Changliu Liu, and Masayoshi Tomizuka. 2020. To- wards efficient human-robot collaboration with robust plan recognition and tra- jectory prediction. IEEE Robotics and Automation Letters 5, 2 (2020), 2602–2609
2020
-
[13]
Patrick Dendorfer, Sven Elflein, and Laura Leal-Taixé. 2021. Mg-gan: A multi- generator model preventing out-of-distribution samples in pedestrian trajectory prediction. In Proceedings of the IEEE/CVF international conference on computer vision. 13158–13167
2021
-
[14]
Yepeng Ding, Ahmed Twabi, Junwei Yu, Lingfeng Zhang, Tohru Kondo, and Hi- royuki Sato. 2025. Decentralized Multi-Agent System with Trust-Aware Com- munication. In 2025 IEEE International Symposium on Parallel and Distributed Processing with Applications (ISPA). IEEE, 1439–1445
2025
-
[15]
Karl Friston. 2009. The free-energy principle: a rough guide to the brain? Trends in cognitive sciences 13, 7 (2009), 293–301
2009
-
[16]
Karl Friston. 2010. The free-energy principle: a unified brain theory? Nature reviews neuroscience 11, 2 (2010), 127–138
2010
-
[17]
Karl Friston, Thomas FitzGerald, Francesco Rigoli, Philipp Schwartenbeck, and Giovanni Pezzulo. 2017. Active inference: a process theory. Neural computation 29, 1 (2017), 1–49
2017
-
[18]
Karl Friston, Michael Levin, Biswa Sengupta, and Giovanni Pezzulo. 2015. Know- ing one’s place: a free-energy approach to pattern regulation. Journal of the Royal Society Interface 12, 105 (2015)
2015
-
[19]
Yuxiang Fu, Qi Yan, Lele Wang, Ke Li, and Renjie Liao. 2025. Moflow: One-step flow matching for human trajectory forecasting via implicit maximum likeli- hood estimation based distillation. In Proceedings of the Computer Vision and Pattern Recognition Conference. 17282–17293
2025
-
[20]
Zheng Fu, Kun Jiang, Chuchu Xie, Yuhang Xu, Jin Huang, and Diange Yang
-
[21]
IEEE Transactions on Intelligent Vehicles (2024), 1–33
Summary and Reflections on Pedestrian Trajectory Prediction in the Field of Autonomous Driving. IEEE Transactions on Intelligent Vehicles (2024), 1–33. doi:10.1109/TIV.2024.3399327
-
[22]
Tianpei Gu, Guangyi Chen, Junlong Li, Chunze Lin, Yongming Rao, Jie Zhou, and Jiwen Lu. 2022. Stochastic trajectory prediction via motion indeterminacy diffusion. In Proceedings of the IEEE/CVF conference on computer vision and pat- tern recognition. 17113–17122
2022
-
[23]
Agrim Gupta, Justin Johnson, Li Fei-Fei, Silvio Savarese, and Alexandre Alahi
-
[24]
In Proceedings of the IEEE conference on computer vision and pattern recognition
Social gan: Socially acceptable trajectories with generative adversarial networks. In Proceedings of the IEEE conference on computer vision and pattern recognition. 2255–2264
-
[25]
Tiankai Hang, Shuyang Gu, Chen Li, Jianmin Bao, Dong Chen, Han Hu, Xin Geng, and Baining Guo. 2023. Efficient diffusion training via min-snr weight- ing strategy. In Proceedings of the IEEE/CVF international conference on computer vision. 7441–7451
2023
-
[26]
Jonathan Ho, Ajay Jain, and Pieter Abbeel. 2020. Denoising diffusion probabilis- tic models. Advances in neural information processing systems 33 (2020), 6840– 6851
2020
-
[27]
Yanjun Huang, Jiatong Du, Ziru Yang, Zewei Zhou, Lin Zhang, and Hong Chen
-
[28]
IEEE transactions on intelligent vehicles 7, 3 (2022), 652–674
A survey on trajectory-prediction methods for autonomous driving. IEEE transactions on intelligent vehicles 7, 3 (2022), 652–674
2022
-
[29]
Durk P Kingma, Tim Salimans, Rafal Jozefowicz, Xi Chen, Ilya Sutskever, and Max Welling. 2016. Improved variational inference with inverse autoregressive flow. Advances in neural information processing systems 29 (2016)
2016
-
[30]
Diederik P Kingma and Max Welling. 2013. Auto-encoding variational bayes. arXiv preprint arXiv:1312.6114 (2013)
work page internal anchor Pith review Pith/arXiv arXiv 2013
-
[31]
Alon Lerner, Yiorgos Chrysanthou, and Dani Lischinski. 2007. Crowds by exam- ple. In Computer graphics forum, Vol. 26. Wiley Online Library, 655–664
2007
-
[32]
Haicheng Liao, Yongkang Li, Zhenning Li, Chengyue Wang, Zhiyong Cui, Shengbo Eben Li, and Chengzhong Xu. 2024. A Cognitive-Based Trajectory Prediction Approach for Autonomous Driving. IEEE Transactions on Intelligent Vehicles 9, 4 (2024), 4632–4643. doi:10.1109/TIV.2024.3376074
-
[33]
Yiwei Lyu, Wenhao Luo, and John M Dolan. 2023. Risk-aware safe control for decentralized multi-agent systems via dynamic responsibility allocation. In 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) . IEEE, 1–8
2023
-
[34]
Dipankar Maity and Panagiotis Tsiotras. 2021. Multiagent consensus subject to communication and privacy constraints. IEEE Transactions on Control of Network Systems 9, 2 (2021), 943–955
2021
-
[35]
Weibo Mao, Chenxin Xu, Qi Zhu, Siheng Chen, and Yanfeng Wang. 2023. Leapfrog diffusion model for stochastic trajectory prediction. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition . 5517–5526. , , Yanping Wu et al
2023
-
[36]
Pietro Mazzaglia, Tim Verbelen, Ozan Catal, and Bart Dhoedt. 2022. The free energy principle for perception and action: A deep learning perspective. Entropy 24, 2 (2022), 301
2022
-
[37]
Abduallah Mohamed, Kun Qian, Mohamed Elhoseiny, and Christian Claudel
-
[38]
In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition
Social-stgcnn: A social spatio-temporal graph convolutional neural net- work for human trajectory prediction. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition . 14424–14432
-
[39]
Shayegan Omidshafiei, Jason Pazis, Christopher Amato, Jonathan P How, and John Vian. 2017. Deep decentralized multi-task multi-agent reinforcement learn- ing under partial observability. In International conference on machine learning . PMLR, 2681–2690
2017
-
[40]
Stefano Pellegrini, Andreas Ess, Konrad Schindler, and Luc Van Gool. 2009. You’ll never walk alone: Modeling social behavior for multi-target tracking. In 2009 IEEE 12th international conference on computer vision . IEEE, 261–268
2009
-
[41]
Giovanni Pezzulo, Thomas Parr, and Karl Friston. 2024. Active inference as a theory of sentient behavior. Biological Psychology 186 (2024), 108741
2024
-
[42]
Tim Salzmann, Boris Ivanovic, Punarjay Chakravarty, and Marco Pavone. 2020. Trajectron++: Dynamically-feasible trajectory forecasting with heterogeneous data. In European conference on computer vision . Springer, 683–700
2020
-
[43]
Allahkaram Shafiei, Hozefa Jesawada, Karl Friston, and Giovanni Russo. 2025. Distributionally robust free energy principle for decision-making. Nature Com- munications (2025)
2025
-
[44]
Liushuai Shi, Le Wang, Chengjiang Long, Sanping Zhou, Mo Zhou, Zhenxing Niu, and Gang Hua. 2021. SGCN: Sparse graph convolution network for pedes- trian trajectory prediction. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition . 8994–9003
2021
-
[45]
Apoorv Singh. 2023. Trajectory-prediction with vision: A survey. In Proceedings of the IEEE/CVF International Conference on Computer Vision . 3318–3323
2023
-
[46]
Jiaming Song, Chenlin Meng, and Stefano Ermon. 2020. Denoising diffusion implicit models. arXiv preprint arXiv:2010.02502 (2020)
work page internal anchor Pith review Pith/arXiv arXiv 2020
-
[47]
Pinhao Song, Pengteng Li, Erwin Aertbeliën, and Renaud Detry. 2024. Robot trajectron: Trajectory prediction-based shared control for robot manipulation. In 2024 IEEE International Conference on Robotics and Automation (ICRA) . IEEE, 5585–5591
2024
-
[48]
Yang Song, Jascha Sohl-Dickstein, Diederik P Kingma, Abhishek Kumar, Stefano Ermon, and Ben Poole. 2020. Score-based generative modeling through stochas- tic differential equations. arXiv preprint arXiv:2011.13456 (2020)
work page internal anchor Pith review Pith/arXiv arXiv 2020
-
[49]
Ashish Vaswani, Noam Shazeer, Niki Parmar, Jakob Uszkoreit, Llion Jones, Aidan N Gomez, Łukasz Kaiser, and Illia Polosukhin. 2017. Attention is all you need. Advances in neural information processing systems 30 (2017)
2017
-
[50]
Petar Veličković, Guillem Cucurull, Arantxa Casanova, Adriana Romero, Pietro Lio, and Yoshua Bengio. 2017. Graph attention networks. arXiv preprint arXiv:1710.10903 (2017)
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[51]
Chenxin Xu, Maosen Li, Zhenyang Ni, Ya Zhang, and Siheng Chen. 2022. Group- net: Multiscale hypergraph neural networks for trajectory prediction with rela- tional reasoning. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. 6498–6507
2022
-
[52]
Chenxin Xu, Robby T Tan, Yuhong Tan, Siheng Chen, Yu Guang Wang, Xinchao Wang, and Yanfeng Wang. 2023. Eqmotion: Equivariant multi-agent motion pre- diction with invariant interaction reasoning. In Proceedings of the IEEE/CVF con- ference on computer vision and pattern recognition . 1410–1420
2023
-
[53]
Pei Xu, Jean-Bernard Hayet, and Ioannis Karamouzas. 2022. Socialvae: Human trajectory prediction using timewise latents. In European Conference on Com- puter Vision. Springer, 511–528
2022
-
[54]
Changzhi Yang, Huihui Pan, Jue Wang, and Yuanduo Hong. 2025. TrajDiff: Tra- jectory Prediction With Diffusion Probabilistic Models. IEEE Transactions on Image Processing 34 (2025), 8257–8270
2025
-
[55]
Songru Yang, Zhenwei Shi, and Zhengxia Zou. 2025. Unified Multi-Agent Trajec- tory Modeling with Masked Trajectory Diffusion. In Proceedings of the IEEE/CVF International Conference on Computer Vision . 27563–27574
2025
-
[56]
Ye Yuan, Xinshuo Weng, Yanglan Ou, and Kris M Kitani. 2021. Agentformer: Agent-aware transformers for socio-temporal multi-agent forecasting. In Pro- ceedings of the IEEE/CVF international conference on computer vision. 9813–9823
2021
-
[57]
Yinyan Zhang, Shuai Li, and Jian Weng. 2022. Distributed k-winners-take-all network: An optimization perspective. IEEE Transactions on Cybernetics 53, 8 (2022), 5069–5081
2022
-
[58]
Zhengquan Zhang and Feng Xu. 2024. An overview of the free energy principle and related research. Neural Computation 36, 5 (2024), 963–1021
2024
-
[59]
Yuanshao Zhu, Yongchao Ye, Shiyao Zhang, Xiangyu Zhao, and James Yu. 2023. Difftraj: Generating gps trajectory with diffusion probabilistic model. Advances in Neural Information Processing Systems 36 (2023), 65168–65188. Received 20 February 2007; revised 12 March 2009; accepted 5 June 2009
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.