Learning Nonlinear Factor Models with Unknown Monotone Links from Incomplete and Noisy Data
Pith reviewed 2026-06-29 20:12 UTC · model grok-4.3
The pith
A projected block coordinate descent algorithm jointly recovers low-rank factors, loadings, and an unknown monotone link function from incomplete noisy data.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that by formulating the problem as joint recovery of the low-rank factors, loadings, and the nonlinear link function from possibly incomplete and noisy observations and proposing a projected block coordinate descent algorithm with explicit regularization to address scale and rotational ambiguities, convergence guarantees hold in both noiseless and noisy regimes along with sublinear regret bounds for the link-function updates, under mild incoherence of factors and standard sampling conditions.
What carries the argument
The projected block coordinate descent algorithm with explicit regularization that jointly updates low-rank factors, loadings, and the RKHS link function while resolving scale and rotational ambiguities.
If this is right
- Convergence holds in the noiseless regime under the stated conditions.
- Convergence holds in the noisy regime under the stated conditions.
- Sublinear regret bounds apply to the updates of the link function.
- The framework extends classical linear factor models to a broad nonlinear regime.
Where Pith is reading between the lines
- The same projected updates might be adapted to other nonparametric classes for the link beyond RKHS.
- Performance on real recommendation or economic datasets could be compared against linear baselines to measure the gain from nonlinearity.
- Relaxing monotonicity while keeping the RKHS assumption could be tested by replacing the projection step.
Load-bearing premise
The link function belongs to a reproducing kernel Hilbert space and the factors satisfy mild incoherence together with standard sampling conditions.
What would settle it
Generate synthetic data with a link function outside any RKHS or with highly coherent factors, run the algorithm, and check whether recovery error remains bounded or grows without bound.
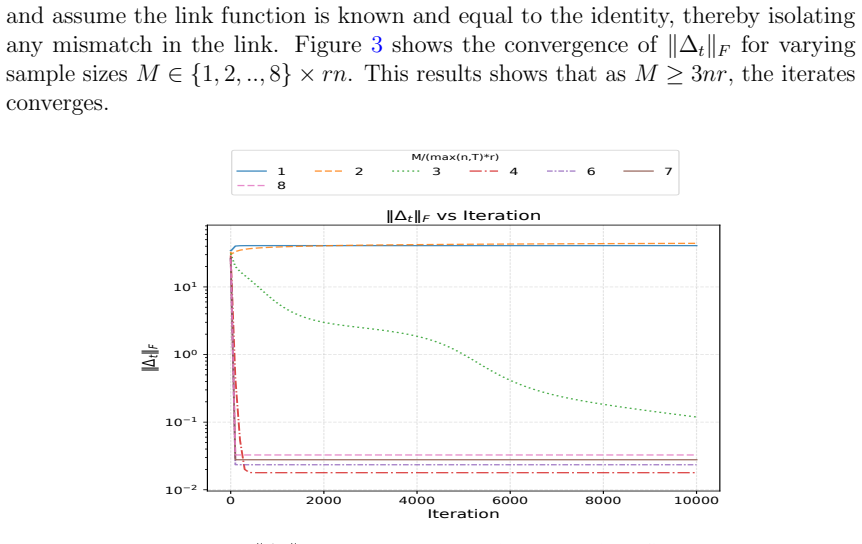
Figures
read the original abstract
We study a nonlinear factor model in which observed responses depend on low-rank latent factors through an unknown monotone link function. This setting is challenging and largely underexplored due to severe nonconvexity and identifiability issues. The link function is assumed to lie in a reproducing kernel Hilbert space (RKHS), enabling flexible nonparametric modeling while preserving identifiability. We formulate the problem as the joint recovery of the low-rank factors, loadings, and the nonlinear link function from possibly incomplete and noisy observations and propose a projected block coordinate descent (BCD) algorithm with explicit regularization to address scale and rotational ambiguities. Under mild incoherence of factors and standard sampling conditions, we establish convergence guarantees in both noiseless and noisy regimes, along with sublinear regret bounds for the link-function updates. Our results extend classical linear factor models to a broad nonlinear regime and provide a principled framework for learning nonlinear latent structures. We evaluate the proposed approach using controlled synthetic experiments, indicating promising performance.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper studies nonlinear factor models where responses depend on low-rank latent factors via an unknown monotone link function assumed to lie in an RKHS. It formulates joint recovery of factors, loadings, and the link from incomplete noisy data, proposes a projected block coordinate descent algorithm with regularization for scale/rotational ambiguities, and claims convergence guarantees in noiseless/noisy regimes plus sublinear regret bounds for link updates under mild factor incoherence and standard sampling. Synthetic experiments are used to indicate performance.
Significance. If the stated convergence and regret results hold with rigorous derivations, the work meaningfully extends classical linear factor models to a flexible nonlinear nonparametric regime while preserving identifiability, offering a principled algorithmic and theoretical framework for latent structure recovery. The RKHS modeling of the monotone link combined with explicit handling of ambiguities is a notable strength, and the synthetic validation provides initial evidence of practicality.
major comments (1)
- [Abstract] Abstract (formulation and guarantees paragraph): the central claims of convergence guarantees in noiseless/noisy regimes and sublinear regret bounds for link-function updates are asserted under mild incoherence and standard sampling, but no derivation steps, proof sketches, or key intermediate lemmas are visible in the provided text; this is load-bearing for the theoretical contribution and prevents verification that the RKHS monotonicity and projected BCD steps do not introduce circularity or unstated parameter dependence.
minor comments (2)
- The description of the projected BCD algorithm would benefit from explicit pseudocode or step-by-step update rules to clarify how the RKHS projection and monotonicity constraint are enforced in practice.
- Synthetic experiment details (e.g., specific incoherence levels, sampling rates, noise variances, and comparison baselines) are referenced but not quantified in the abstract, which limits immediate assessment of the empirical support.
Simulated Author's Rebuttal
We thank the referee for their thoughtful review and for highlighting the importance of making the theoretical arguments more transparent. We address the single major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract (formulation and guarantees paragraph): the central claims of convergence guarantees in noiseless/noisy regimes and sublinear regret bounds for link-function updates are asserted under mild incoherence and standard sampling, but no derivation steps, proof sketches, or key intermediate lemmas are visible in the provided text; this is load-bearing for the theoretical contribution and prevents verification that the RKHS monotonicity and projected BCD steps do not introduce circularity or unstated parameter dependence.
Authors: We agree that the main-text presentation states the convergence and regret results without including proof sketches or key lemmas, which limits immediate verification of the claims. The complete proofs appear in the appendix, but we acknowledge that this is insufficient for the main body. In revision we will insert a concise proof outline immediately after the theorem statements in Section 3. The outline will (i) show that the projected BCD updates remain contractive under the stated incoherence condition because each block projection is non-expansive with respect to the factor metric, (ii) verify that monotonicity of the link is preserved by construction via the explicit projection onto the monotone cone in the RKHS (no circularity arises because the monotonicity constraint is enforced after each kernel update), and (iii) derive the sublinear regret bound from a standard online-gradient argument whose step-size and gradient bounds depend only on the incoherence and sampling parameters already stated in the theorem. We will also add a short remark clarifying that all constants are explicit functions of the incoherence and RKHS-norm parameters. These additions will not change any stated results. revision: yes
Circularity Check
No significant circularity identified in the derivation chain
full rationale
The abstract and formulation describe a projected BCD algorithm for joint recovery of low-rank factors, loadings, and a monotone link in an RKHS, with convergence claims resting on standard incoherence and sampling assumptions that extend classical linear factor models. No equations, fitting procedures, or self-citations are exhibited that would reduce the stated guarantees to tautological definitions, fitted inputs renamed as predictions, or load-bearing self-referential steps. The derivation chain remains self-contained against external benchmarks, with the RKHS assumption and projected updates providing independent nonparametric structure rather than circular reparameterization.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Link function lies in an RKHS
- domain assumption Mild incoherence of factors and standard sampling conditions
Reference graph
Works this paper leans on
-
[1]
5 M. Chen, I. Fern´ andez-Val, and M. Weidner. Nonlinear panel models with interactive effects.arXiv preprint arXiv:1412.5647, 2014. 5 M. Chen, I. Fern´ andez-Val, and M. Weidner. Nonlinear factor models for network and panel data.Journal of Econometrics, 220(2):296–324, 2021. 5 Y. Chen and M. J. Wainwright. Fast low-rank estimation by projected gradi- en...
-
[2]
2 D. Filipovic and P. Schneider. Fundamental properties of linear factor models.arXiv preprint arXiv:2409.02521, 2024. 4 J. Fletcher. An examination of linear factor models in uk stock returns in the presence of dynamic trading.Review of Quantitative Finance and Accounting, 63 (3):1121–1147, 2024. 4 T. Hastie. The elements of statistical learning: data mi...
-
[3]
3 D. Hsu, S. M. Kakade, and T. Zhang. Robust matrix decomposition with sparse corruptions.IEEE Transactions on Information Theory, 57(11):7221–7234, 2011. 2 I. M. Johnstone and A. Y. Lu. On consistency and sparsity for principal components analysis in high dimensions.Journal of the American Statistical Association, 104 (486):682–693, 2009. 2 ˇZ. Kereta an...
2011
-
[4]
3 R. H. Keshavan, A. Montanari, and S. Oh. Matrix completion from a few entries. IEEE Transactions on Information Theory, 56(6):2980–2998, 2010. 4 T. Klock, A. Lanteri, and S. Vigogna. Estimating multi-index models with response- conditional least squares.Electronic Journal of Statistics, 2021. 5 Y. Koren, R. Bell, and C. Volinsky. Matrix factorization te...
2010
-
[5]
4 21 K.-Y. Lee, B. Li, and F. Chiaromonte. A general theory for nonlinear sufficient dimension reduction: Formulation and estimation.The Annals of Statistics, pages 221–249, 2013. 5 B. Li.Sufficient dimension reduction: Methods and applications with R. Chapman and Hall/CRC, 2018. 5 B. Li and J. Song. Dimension reduction for functional data based on weak c...
work page internal anchor Pith review Pith/arXiv arXiv 2013
-
[6]
Using this bound along with the analysis in Zheng and Lafferty (2016) (Appendix C.2), we get: ∥DZZ ⊤DZ∥ 2 F ≤6(∥∆∥ 2 F + 4σ∗ 1)∥∆∥2 F ∥Z∥2 2 + 4σ∗ 1∥Φ⊤D∆∥2 F ≤30σ ∗ 1∥∆∥2 F ∥Z∥2 2 + 4σ∗ 1∥Φ⊤D∆∥2 F ≤180(σ ∗ 1)2∥∆∥2 F + 4σ∗ 1∥Φ⊤D∆∥2 F ,(∥Z∥ 2 2 ≤6σ ∗
2016
-
[7]
(A.10) The last bound can be derived using the fact that∥Φ∥ 2 2 ≤2σ ∗ 1 and ∥Z∥2 2 =∥Φ + ∆∥ 2 2 ≤(∥Φ∥ 2 +∥∆∥ 2)2 ≤2(∥Φ∥ 2 2 +∥∆∥ 2 2)≤2(2σ ∗ 1 +σ ∗
-
[8]
= 6σ∗ 1. Putting all together and recalling that λ ξ2 = 1 2nT and∥∆∥ 2 ≤ϵσ ∗ r yield ∥∇Z ˜L(Z, ϕ)∥2 F ≤24Ξ 4 ε ξ 2 + 2σ∗ 1 nT ∥∆∥2 F + 1 nT ∥∆∥4 F ! 7µrσ∗ 1 nT(n+T) + ξ4 n2T 2 90(σ∗ 1)2∥∆∥2 F + 2σ∗ 1∥Φ⊤D∆∥2 F ≤ 336Ξ4µr(σ∗ 1)2 (nT) 2(n+T) + 90(σ∗ 1)2ξ4 (nT) 2 + 168Ξ4µrσ∗ 1 (nT) 2(n+T) ∥∆∥2 F ∥∆∥2 F + 168Ξ4µrσ∗ 1 nT(n+T)ξ 2 ε2 + 2ξ4σ∗ 1 (nT) 2 ∥Φ⊤D∆∥2 F ≤ 5...
-
[9]
Therefore, combining with (B.8), we obtain with probability at least 1−δ: |Tu|= 2 MX k=1 uksk ≤2σ∥s∥ 2 p 2 log(2/δ)≤2σΞ p 2 log(2/δ) p D(Z∆ ⊤ + ∆Z⊤)
Hence, for anyδ∈(0,1), with probability at least 1−δ, MX k=1 uksk ≤σ∥s∥ 2 p 2 log(2/δ).(B.8) Usingϕ ′(zk)≤Ξ and the identity (Ak +A ⊤ k )Z,∆ =⟨A k, Z∆⊤⟩+⟨A k,∆Z ⊤⟩=⟨A k, Z∆⊤ + ∆Z⊤⟩, we get ∥s∥2 2 = MX k=1 s2 k ≤Ξ 2 MX k=1 ⟨Ak, Z∆⊤ + ∆Z⊤⟩2 = Ξ2 D(Z∆ ⊤ + ∆Z⊤). Therefore, combining with (B.8), we obtain with probability at least 1−δ: |Tu|= 2 MX k=1 uksk ≤2σ∥...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.