Context-Aware Metric Differential Privacy for Vehicle Trajectory Data
Pith reviewed 2026-06-29 21:05 UTC · model grok-4.3
The pith
C-mDP achieves higher utility than standard mDP for vehicle trajectories under identical privacy budgets.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
C-mDP treats the protected secret as a context-augmented record and enforces metric indistinguishability over this augmented domain. Optimal mechanisms are obtained by solving a linear program that minimizes expected utility loss subject to the C-mDP constraints; the program is reduced by exploiting conditional independence between the current location and the contextual variables. On real-world vehicle mobility datasets the resulting mechanisms deliver higher utility than standard mDP baselines at the same privacy budget.
What carries the argument
The context-augmented record together with the reduced linear program that minimizes expected utility loss subject to C-mDP constraints.
If this is right
- Trajectory services obtain more accurate released data at any fixed privacy budget.
- The reduced linear program remains tractable for histories of moderate length.
- Privacy guarantees apply jointly to location and its contextual variables.
- The same formulation applies to any data whose utility depends on temporal correlations.
Where Pith is reading between the lines
- The approach could be tested on synthetic trajectories that deliberately violate the independence assumption to measure the price of the reduction.
- Released traces that preserve context correlations may improve accuracy of downstream tasks such as destination prediction.
- The framework may transfer to other sequential data domains where context affects both utility and privacy, such as user session logs.
Load-bearing premise
The conditional-independence structure between the current location and contextual variables can be exploited to derive a reduced linear program without weakening the privacy guarantee.
What would settle it
An explicit pair of context-augmented records whose output distributions violate the metric privacy bound, or an evaluation on the paper's datasets in which C-mDP shows no utility gain over standard mDP.
Figures


read the original abstract
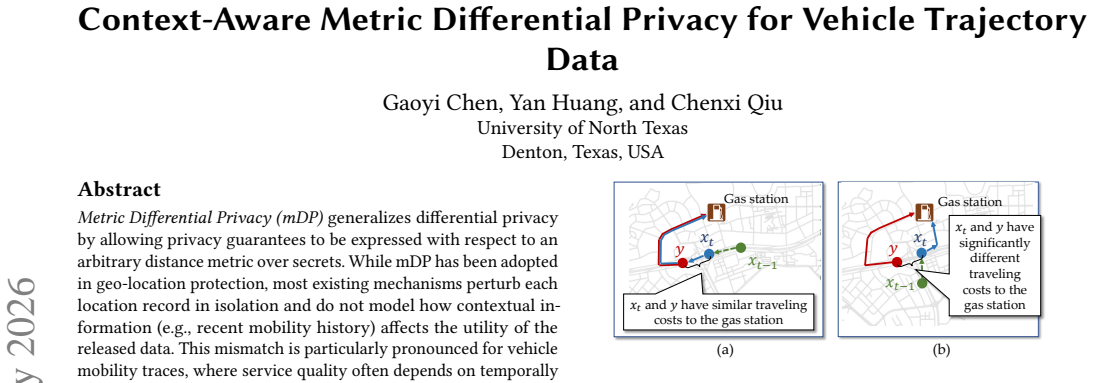
Metric Differential Privacy (mDP) generalizes differential privacy by allowing privacy guarantees to be expressed with respect to an arbitrary distance metric over secrets. While mDP has been adopted in geo-location protection, most existing mechanisms perturb each location record in isolation and do not model how contextual information (e.g., recent mobility history) affects the utility of the released data. This mismatch is particularly pronounced for vehicle mobility traces, where service quality often depends on temporally correlated locations. In this paper, we propose Context-aware mDP (C-mDP), a framework for vehicle location privacy that incorporates contextual dependencies into both the utility model and the privacy notion. C-mDP treats the protected secret as a context-augmented record and enforces metric indistinguishability over this augmented domain. We formulate optimal C-mDP mechanism design as a linear program (LP) that minimizes expected utility loss subject to C-mDP constraints. To improve scalability, we exploit conditional-independence structure between the current location and contextual variables to derive a reduced formulation with substantially fewer decision variables and constraints. We evaluate C-mDP on real-world vehicle mobility datasets and compare it with standard mDP baselines. The results show that C-mDP consistently achieves higher utility under the same privacy budget while satisfying the required metric privacy guarantees.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes Context-aware Metric Differential Privacy (C-mDP) for vehicle trajectory data. It treats the secret as a context-augmented record, enforces metric indistinguishability over this domain, and formulates optimal mechanism design as an LP minimizing expected utility loss subject to the C-mDP constraints. Conditional independence between current location and context is exploited to obtain a reduced LP with substantially fewer variables and constraints. Evaluation on real-world mobility datasets is claimed to show that C-mDP achieves higher utility than standard mDP baselines under the same privacy budget while satisfying the guarantees.
Significance. If the reduction is shown to preserve the full privacy constraints, the framework could meaningfully improve the utility-privacy tradeoff for temporally correlated location data in mobility applications. The LP-based optimal mechanism design is a standard technique, but the explicit incorporation of context into both utility and privacy is a targeted extension for trajectory protection.
major comments (1)
- [LP formulation and reduction (abstract and the section presenting the reduced program)] The abstract states that the conditional-independence reduction yields a formulation with substantially fewer decision variables and constraints while still satisfying the required metric privacy guarantees, but supplies no argument, lemma, or verification that every pairwise C-mDP constraint over the full (location, context) space is either retained or implied by the reduced program. If any original constraint is dropped or relaxed, the output mechanism can violate C-mDP for some pairs even while satisfying the reduced LP.
minor comments (1)
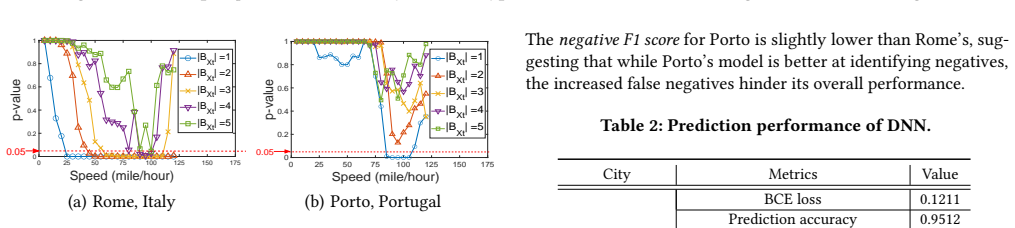
- [Evaluation section] Dataset details (number of traces, sampling rates, metric definitions) and quantitative results (utility values, error bars, statistical significance) are referenced in the abstract but not supplied in the provided text, making it impossible to assess the claimed utility gains.
Simulated Author's Rebuttal
We thank the referee for the careful and constructive review. The single major comment identifies a missing explicit justification for the conditional-independence reduction; we address it directly below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [LP formulation and reduction (abstract and the section presenting the reduced program)] The abstract states that the conditional-independence reduction yields a formulation with substantially fewer decision variables and constraints while still satisfying the required metric privacy guarantees, but supplies no argument, lemma, or verification that every pairwise C-mDP constraint over the full (location, context) space is either retained or implied by the reduced program. If any original constraint is dropped or relaxed, the output mechanism can violate C-mDP for some pairs even while satisfying the reduced LP.
Authors: We agree that the current manuscript does not supply a self-contained lemma or verification step showing that every pairwise C-mDP constraint is retained or implied by the reduced program. In the revised version we will insert, immediately after the derivation of the reduced LP, a formal lemma stating that, under the stated conditional independence between the current location and the contextual variables, any feasible solution to the reduced program satisfies the full set of metric-indistinguishability constraints over the augmented (location, context) domain. The lemma will include a short proof that the original constraints factorize and that the omitted constraints are redundant once the independence structure is used; we will also add a brief verification paragraph confirming that the reduction does not relax any required pairwise distance bound. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper presents C-mDP as an LP that minimizes expected utility loss subject to metric indistinguishability constraints over a context-augmented domain, then applies a conditional-independence reduction to obtain a smaller program. This is standard LP machinery for mechanism design and does not reduce any claimed utility gain to a fitted input, self-definition, or self-citation chain. No equations are shown that equate a prediction to its own inputs by construction, and the abstract's description of the reduction does not invoke prior self-citations as load-bearing uniqueness theorems. The derivation remains self-contained against external benchmarks such as standard mDP baselines.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Taxi Service Trajectory - Prediction Challenge, ECML PKDD 2015 Data Set
2019. Taxi Service Trajectory - Prediction Challenge, ECML PKDD 2015 Data Set. https://archive.ics.uci.edu/ml/datasets/Taxi+Service+Trajectory+- +Prediction+Challenge,+ECML+PKDD+2015. Accessed: 2019-07-22
2019
-
[2]
openstreetmap
2020. openstreetmap. https://www.openstreetmap.org/. Accessed: 2020-04-07
2020
-
[3]
2024. PyTorch. https://pytorch.org/. Accessed in January 2024
2024
-
[4]
M. E. Andrés, N. E. Bordenabe, K. Chatzikokolakis, and C. Palamidessi. 2013. Geo-indistinguishability: Differential Privacy for Location-based Systems. In Proc. of ACM CCS. 901–914
2013
-
[5]
Qasim Ali Arain, Imran Memon, Zhongliang Deng, Muhammad Hammad Memon, Farman Ali Mangi, and Asma Zubedi. 2018. Location Monitoring Approach: Multiple Mix-Zones with Location Privacy Protection Based on Traffic Flow over Road Networks.Multimedia Tools Appl.77, 5 (mar 2018), 5563–5607
2018
-
[6]
2019.Conditional Independence Testing Using Generative Adversarial Networks
Alexis Bellot and Mihaela van der Schaar. 2019.Conditional Independence Testing Using Generative Adversarial Networks. Curran Associates Inc., Red Hook, NY, USA
2019
-
[7]
2015.Algorithms: Design and Analysis
Harsh Bhasin. 2015.Algorithms: Design and Analysis. Oxford Univ Press
2015
-
[8]
N. E. Bordenabe, K. Chatzikokolakis, and C. Palamidessi. 2014. Optimal Geo- Indistinguishable Mechanisms for Location Privacy. InProc. of ACM CCS. 251– 262
2014
-
[9]
Lorenzo Bracciale, Marco Bonola, Pierpaolo Loreti, Giuseppe Bianchi, Raul Amici, and Antonello Rabuffi. 2014. CRAWDAD dataset roma/taxi (v. 2014-07-17). Down- loaded from https://crawdad.org/roma/taxi/20140717. doi:10.15783/C7QC7M
-
[10]
Y. Cao, Y. Xiao, L. Xiong, and L. Bai. 2019. PriSTE: From Location Privacy to Spatiotemporal Event Privacy. InProc. of IEEE ICDE. 1606–1609
2019
-
[11]
Yang Cao, Masatoshi Yoshikawa, Yonghui Xiao, and Li Xiong. 2017. Quantifying Differential Privacy under Temporal Correlations. InProc. of 2017 IEEE 33rd International Conference on Data Engineering (ICDE). 821–832. doi:10.1109/ICDE. 2017.132
- [12]
-
[13]
Andrés, Nicolás Emilio Bordenabe, and Catuscia Palamidessi
Konstantinos Chatzikokolakis, Miguel E. Andrés, Nicolás Emilio Bordenabe, and Catuscia Palamidessi. 2013. Broadening the Scope of Differential Privacy Using Metrics. InProc. of Privacy Enhancing Technologies, Emiliano De Cristofaro and Matthew Wright (Eds.). Springer Berlin Heidelberg, Berlin, Heidelberg, 82–102
2013
-
[14]
J. Chen, H. Ma, D. Zhao, and L. Liu. 2021. Correlated Differential Privacy Pro- tection for Mobile Crowdsensing.IEEE Transactions on Big Data7, 04 (oct 2021), 784–795. doi:10.1109/TBDATA.2017.2777862
-
[15]
Rui Chen, Benjamin C. Fung, Philip S. Yu, and Bipin C. Desai. 2014. Correlated Network Data Publication via Differential Privacy.The VLDB Journal23, 4 (aug 2014), 653–676. doi:10.1007/s00778-013-0344-8
-
[16]
Cynthia Dwork. 2006. Differential Privacy. InProc. of Automata, Languages and Programming, Michele Bugliesi, Bart Preneel, Vladimiro Sassone, and Ingo Wegener (Eds.). Springer Berlin Heidelberg, Berlin, Heidelberg, 1–12
2006
-
[17]
Emrich, H
T. Emrich, H. Kriegel, N. Mamoulis, M. Renz, and A. Zufle. 2012. Querying Uncertain Spatio-Temporal Data. InProc. of IEEE ICDE. 354–365
2012
-
[18]
K. Fawaz and K. G. Shin. 2014. Location Privacy Protection for Smartphone Users. InProc. of ACM CCS(Scottsdale, Arizona, USA). ACM, New York, NY, USA, 239–250. doi:10.1145/2660267.2660270
-
[19]
InProceedings of the 16th International Conference on Mining Software Repositories (MSR)
O. Feyisetan, T. Diethe, and T. Drake. 2019. Leveraging Hierarchical Represen- tations for Preserving Privacy and Utility in Text. In2019 IEEE International Conference on Data Mining (ICDM). IEEE Computer Society, Los Alamitos, CA, USA, 210–219. doi:10.1109/ICDM.2019.00031
-
[20]
Xi He, Ashwin Machanavajjhala, and Bolin Ding. 2014. Blowfish Privacy: Tuning Privacy-Utility Trade-Offs Using Policies. InProc. of the 2014 ACM SIGMOD International Conference on Management of Data(Snowbird, Utah, USA)(SIGMOD ’14). Association for Computing Machinery, New York, NY, USA, 1447–1458. doi:10.1145/2588555.2588581
-
[21]
Jacob Imola, Shiva Kasiviswanathan, Stephen White, Abhinav Aggarwal, and Nathanael Teissier. 2022. Balancing utility and scalability in metric differential pri- vacy. InProc. of UAI 2022. https://www.amazon.science/publications/balancing- utility-and-scalability-in-metric-differential-privacy
2022
-
[22]
Leahy, and Matthew T
Austin Jones, Kevin J. Leahy, and Matthew T. Hale. 2018. Towards Differential Privacy for Symbolic Systems.2019 American Control Conference (ACC)(2018), 372–377. https://api.semanticscholar.org/CorpusID:52811575
2018
-
[23]
Daniel Kifer and Ashwin Machanavajjhala. 2012. A Rigorous and Customizable Framework for Privacy. InProc. of the 31st ACM SIGMOD-SIGACT-SIGAI Sym- posium on Principles of Database Systems(Scottsdale, Arizona, USA)(PODS ’12). Association for Computing Machinery, New York, NY, USA, 77–88. doi:10.1145/ 2213556.2213571
-
[24]
Q. Li, Y. Zheng, X. Xie, Y. Chen, W. Liu, and W. Ma. 2008. Mining User Similarity Based on Location History. InProc. of SIGSPATIAL. Article 34, 10 pages
2008
-
[25]
W. Li, H. Chen, W. Ku, and X. Qin. 2017. Scalable Spatiotemporal Crowdsourcing for Smart Cities Based on Particle Filtering. InProc. of ACM SIGSPATIAL
2017
-
[26]
L. Liao, D. J. Patterson, D. Fox, and H. Kautz. 2007. Learning and inferring transportation routines.Artificial Intelligence171, 5 (2007), 311 – 331
2007
-
[27]
Changchang Liu, Supriyo Chakraborty, and Prateek Mittal. 2016. Dependence Makes You Vulnberable: Differential Privacy Under Dependent Tuples. InProc. of Network and Distributed System Security Symposium
2016
-
[28]
Ruiyao Liu and Chenxi Qiu. 2025. PAnDA: Rethinking Metric Differential Privacy Optimization at Scale with Anchor-Based Approximation. InProceedings of the 2025 ACM SIGSAC Conference on Computer and Communications Security(Taipei, Taiwan)(CCS ’25). Association for Computing Machinery, New York, NY, USA, 1290–1304. doi:10.1145/3719027.3765042
-
[29]
Frank McSherry and Kunal Talwar. 2007. Mechanism Design via Differential Privacy. In48th Annual IEEE Symposium on Foundations of Computer Science (FOCS’07). 94–103. doi:10.1109/FOCS.2007.66
-
[30]
Pappachan, C
P. Pappachan, C. Qiu, A. Squicciarini, and V. Manjunath. 2023. User Customizable and Robust Geo-Indistinguishability for Location Privacy. InProc. of International Conference on Extending Database Technology (EDBT)
2023
-
[31]
Shaojie Qiao, Dayong Shen, Xiaoteng Wang, Nan Han, and William Zhu. 2015. A Self-Adaptive Parameter Selection Trajectory Prediction Approach via Hidden Markov Models.IEEE Transactions on Intelligent Transportation Systems16, 1 (2015), 284–296. doi:10.1109/TITS.2014.2331758
-
[32]
C. Qiu. 2024. Enhancing Scalability of Metric Differential Privacy via Secret Dataset Partitioning and Benders Decomposition. InProc. of 33rd International Joint Conference on Artificial Intelligence (IJCAI) 2024
2024
- [33]
-
[34]
C. Qiu, A. C. Squicciarini, Z. Li, C. Pang, and L. Yan. 2020. Time-Efficient Geo- Obfuscation to Protect Worker Location Privacy over Road Networks in Spatial Crowdsourcing. InProc. of ACM CIKM 2024
2020
-
[35]
C. Qiu, A. C. Squicciarini, C. Pang, N. Wang, and B. Wu. 2020. Location Privacy Protection in Vehicle-Based Spatial Crowdsourcing via Geo-Indistinguishability. IEEE Transactions on Mobile Computing(2020), 1–1. doi:10.1109/TMC.2020. 3037911
-
[36]
Qiu, S Yadav, Y
C. Qiu, S Yadav, Y. Ji, A. Squicciarini, R. Dantu, J. Zhao, and C. Xu. 2024. Fine- Grained Geo-Obfuscation to Protect Workers’ Location Privacy in Time-Sensitive Spatial Crowdsourcing. InProc. of 27th International Conference on Extending Database Technology (EDBT)
2024
-
[37]
C. Qiu, L. Yan, A. Squicciarini, J. Zhao, C. Xu, and P. Pappachan. 2022. Traffi- cAdaptor: An Adaptive Obfuscation Strategy for Vehicle Location Privacy Against Vehicle Traffic Flow Aware Attacks. InProc. of ACM SIGSPATIAL
2022
-
[38]
Meyer Scetbon, Laurent Meunier, and Yaniv Romano. 2022. An Asymptotic Test for Conditional Independence using Analytic Kernel Embeddings. InProceedings of the 39th International Conference on Machine Learning (Proceedings of Machine Learning Research, Vol. 162), Kamalika Chaudhuri, Stefanie Jegelka, Le Song, Csaba Szepesvari, Gang Niu, and Sivan Sabato (E...
2022
-
[39]
R. Sen, A. Suresh, K. Shanmugam, G. Alexandros Dimakis, and S. Shakkottai
-
[40]
InAdvances in Neural Information Processing Systems, Vol
Model-Powered Conditional Independence Test. InAdvances in Neural Information Processing Systems, Vol. 30
-
[41]
Daniel W. Stroock. 2010.Probability Theory: An Analytic View(2nd ed.). Cam- bridge University Press
2010
-
[42]
H. To, G. Ghinita, L. Fan, and C. Shahabi. 2017. Differentially Private Location Protection for Worker Datasets in Spatial Crowdsourcing.IEEE Transactions on Mobile Computing(2017), 934–949
2017
-
[43]
Tsamardinos, Constantin F
I. Tsamardinos, Constantin F. Aliferis, and Alexander R. Statnikov. 2003. Algo- rithms for Large Scale Markov Blanket Discovery. InThe Florida AI Research Society. https://api.semanticscholar.org/CorpusID:1930258
2003
-
[44]
F. Xu, Z. Tu, Y. Li, P. Zhang, X. Fu, and D. Jin. 2017. Trajectory Recovery From Ash: User Privacy Is NOT Preserved in Aggregated Mobility Data. InProc. of ACM WWW. 1241–1250
2017
-
[45]
Bin Yang, Issei Sato, and Hiroshi Nakagawa. 2015. Bayesian Differential Privacy on Correlated Data. InProc. of the 2015 ACM SIGMOD International Conference on Management of Data(Melbourne, Victoria, Australia)(SIGMOD ’15). Association for Computing Machinery, New York, NY, USA, 747–762. doi:10.1145/2723372. 2747643
-
[46]
L. Yu, L. Liu, and C. Pu. 2017. Dynamic Differential Location Privacy with Personalized Error Bounds. InProc. of IEEE NDSS. Conference’17, July 2017, Washington, DC, USA Trovato et al
2017
-
[47]
Tianqing Zhu, Ping Xiong, Gang Li, and Wanlei Zhou. 2015. Correlated Differen- tial Privacy: Hiding Information in Non-IID Data Set.IEEE Transactions on Infor- mation Forensics and Security10, 2 (2015), 229–242. doi:10.1109/TIFS.2014.2368363 Appendix A Math Notations Table 3: Main notations and their descriptions. Symbol Description 𝑄Perturbation function...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.