PIDM-DP: Physics-Informed Diffusion with Dormand-Prince Integration for Chaotic System Identification and State Reconstruction across Multiple Dynamical Regimes
Pith reviewed 2026-06-29 19:41 UTC · model grok-4.3
The pith
Embedding a fifth-order Dormand-Prince ODE integrator into a diffusion model's reverse sampling loop reconstructs chaotic trajectories from sparse noisy data while satisfying the governing equations at fifth-order accuracy.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
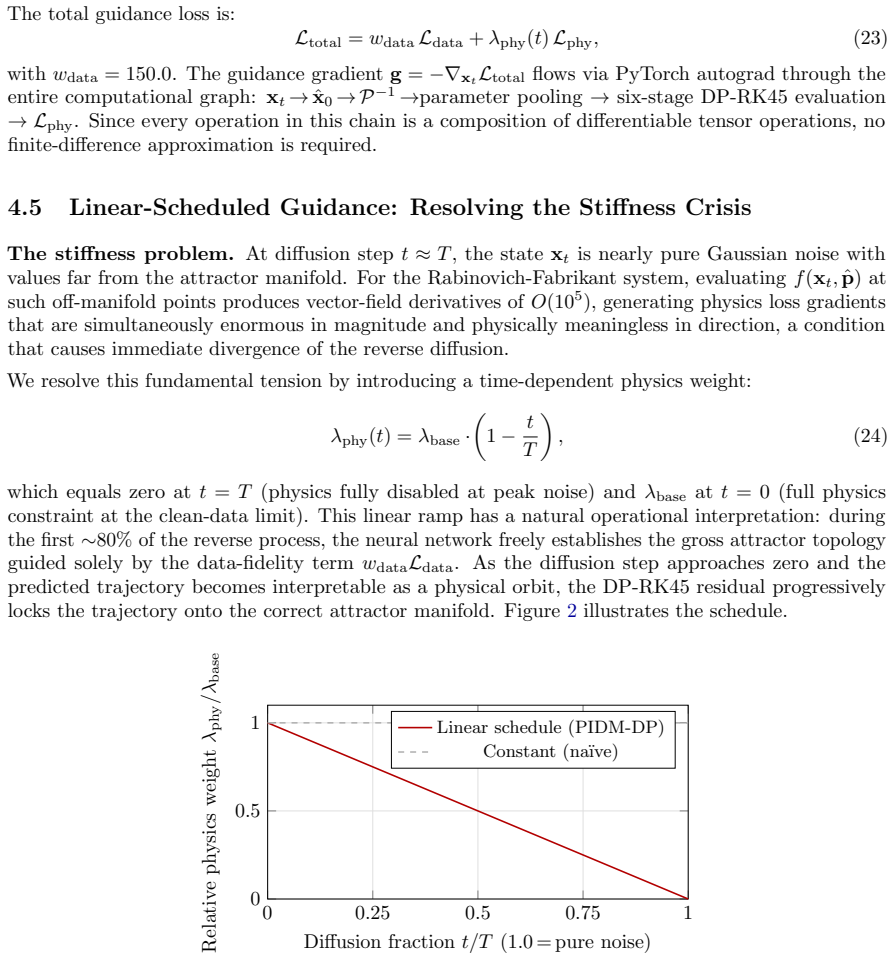
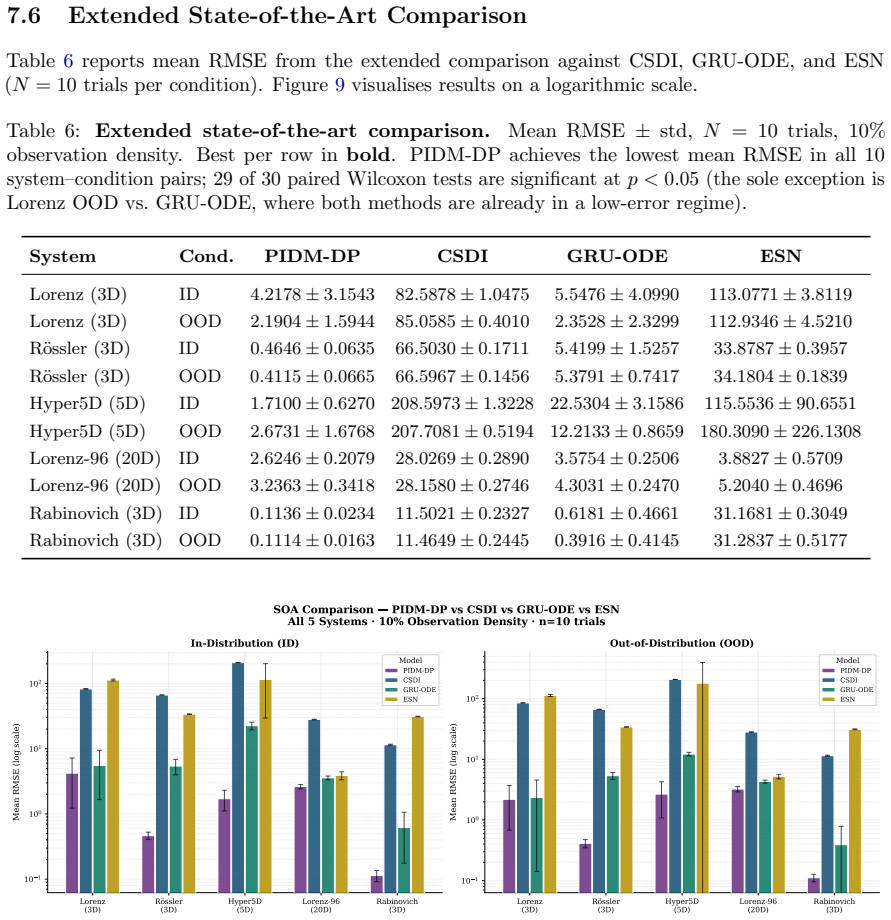
PIDM-DP embeds a fully differentiable 5th-order Dormand-Prince (DP-RK45) ODE integrator into the DDPM reverse sampling loop so that at each denoising step physics residuals are back-propagated via automatic differentiation, constraining every generated trajectory to satisfy the governing equations to 5th-order accuracy; a linear-scheduled guidance mechanism ramps the physics weight from zero at high noise to full strength near clean data to prevent gradient explosions on stiff systems with Jacobian eigenvalues O(10^3).
What carries the argument
The fully differentiable 5th-order Dormand-Prince (DP-RK45) ODE integrator embedded inside the diffusion reverse sampling loop together with linear-scheduled physics guidance.
If this is right
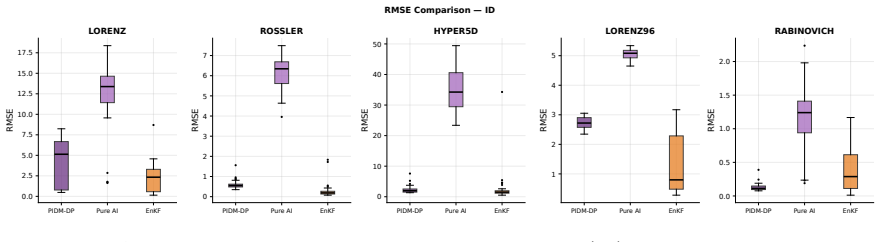
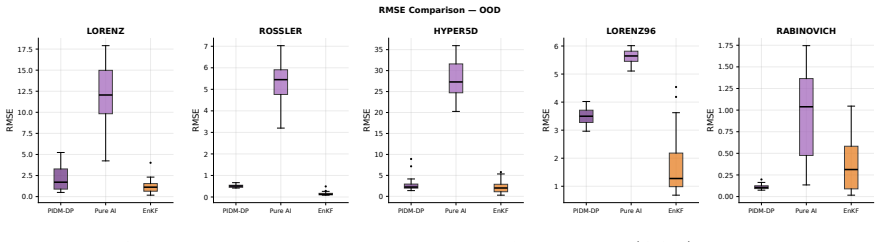
- On the stiff Rabinovich-Fabrikant system the method attains RMSE 0.1097 versus 0.9443 for unconstrained diffusion and 0.3561 for the Ensemble Kalman Filter.
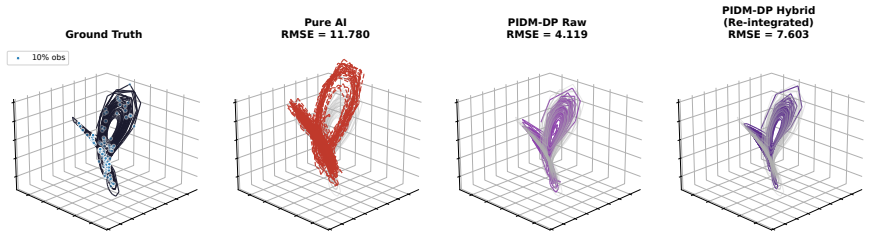
- Reconstruction improvements reach up to 15.4 times lower RMSE than the unconstrained diffusion baseline across five benchmarks of increasing dimension.
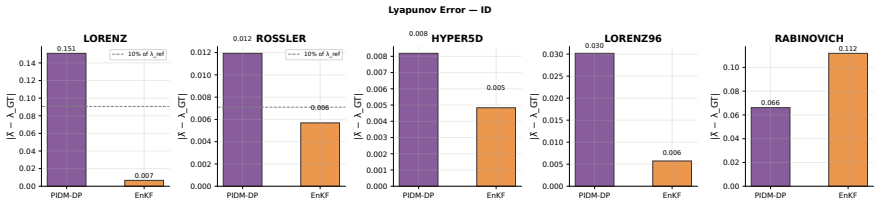
- Topological validation via the Rosenstein Lyapunov estimator shows that the reconstructed trajectories preserve the chaotic invariant measure.
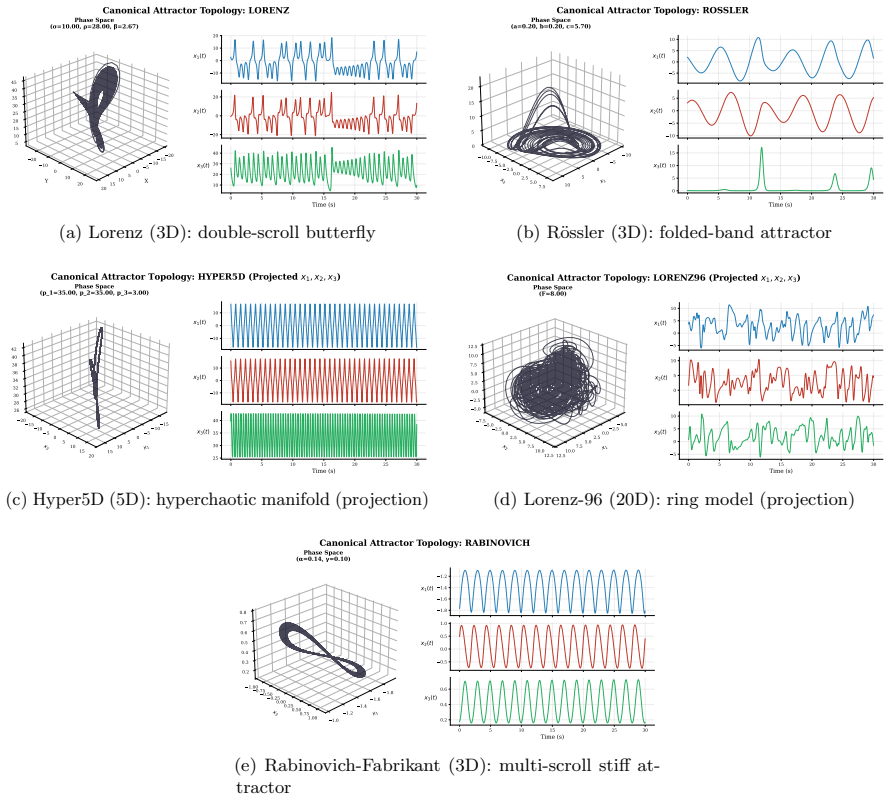
- The approach works at 10 percent observation density with additive Gaussian noise of sigma 0.05 across 3D Lorenz, Rossler, hyperchaotic, 20D Lorenz-96, and stiff Rabinovich-Fabrikant systems.
Where Pith is reading between the lines
- The same embedding strategy could be tested on real sensor data from fluid or atmospheric flows where only partial state measurements are available.
- Replacing the fixed linear schedule with an adaptive one might further reduce the need for manual tuning when moving between different stiffness regimes.
- Combining the method with online parameter estimation would turn it into a joint identifier of both states and unknown coefficients in the governing equations.
Load-bearing premise
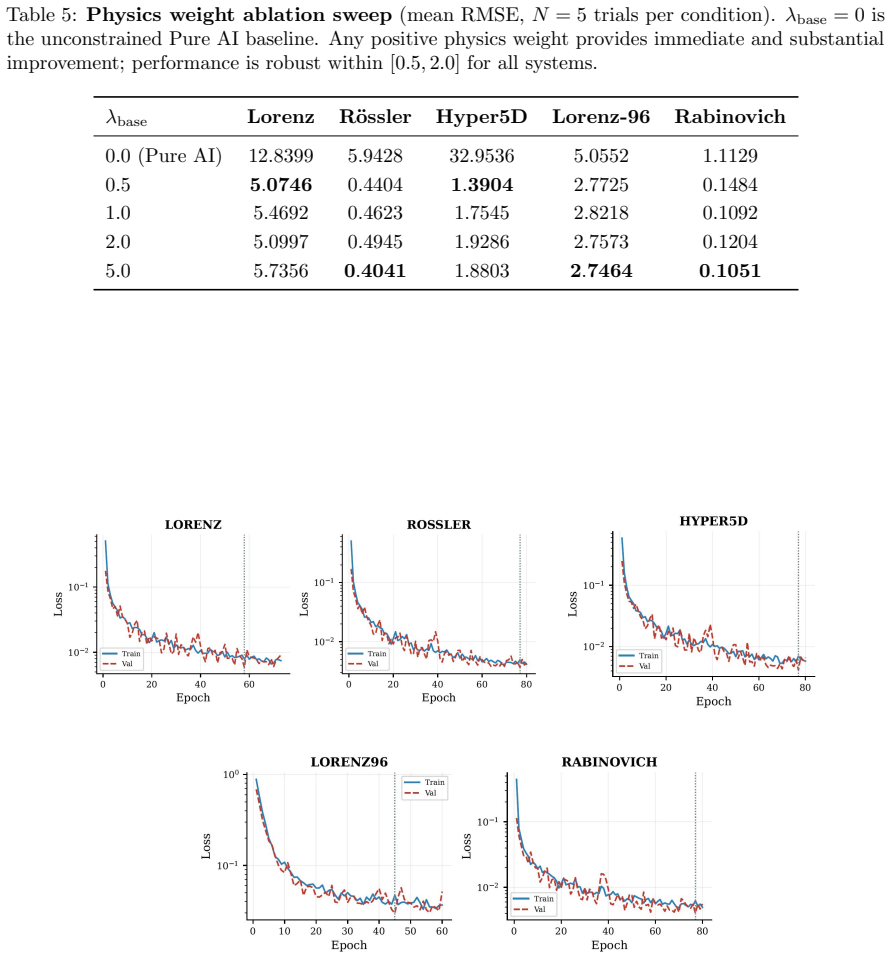
The linear-scheduled guidance prevents gradient explosions on stiff systems without introducing reconstruction bias or requiring system-specific tuning beyond the schedule itself.
What would settle it
Demonstrating gradient explosions, loss of chaotic invariants, or biased reconstructions when the same model is applied to a system whose Jacobian eigenvalues exceed O(10^3) or when the observation density drops below 10 percent.
Figures
read the original abstract
Reconstructing continuous state trajectories of chaotic dynamical systems from sparse, noisy observations remains a fundamental open problem in nonlinear science. We introduce the Physics-Informed Diffusion Model with Dormand-Prince Integration (PIDM-DP), which embeds a fully differentiable 5th-order Dormand-Prince (DP-RK45) ODE integrator directly into the reverse sampling loop of a Denoising Diffusion Probabilistic Model (DDPM). At each denoising step, physics residuals are back-propagated via automatic differentiation, constraining every generated trajectory to satisfy the system's governing equations to 5th-order accuracy. A linear-scheduled guidance mechanism that ramps the physics weight from zero at high noise levels to its full value near the clean-data limit prevents the gradient explosions that cause naive physics-informed approaches to fail on stiff systems with Jacobian eigenvalues of order $O(10^3)$. Evaluated across five benchmark systems of increasing complexity 3D Lorenz, 3D R\"ossler, 5D Hyperchaotic, 20D Lorenz-96, and the stiff 3D Rabinovich-Fabrikant at 10% observation density with additive Gaussian noise ($\sigma=0.05$), PIDM-DP achieves reconstruction RMSE improvements of up to $15.4\times$ over an unconstrained diffusion baseline and decisively outperforms the Ensemble Kalman Filter on stiff systems where ensemble covariance collapses. On the Rabinovich-Fabrikant out-of-distribution benchmark, PIDM-DP attains RMSE $0.1097 \pm 0.0269$ versus $0.9443 \pm 0.5288$ (unconstrained diffusion, $8.6\times$ worse) and $0.3561 \pm 0.3040$ (EnKF, $3.2\times$ worse), with $p<0.001$ in paired Wilcoxon tests ($N = 30$). Topological validation via the Rosenstein Lyapunov estimator confirms that PIDM-DP preserves the chaotic invariant measure.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces PIDM-DP, a denoising diffusion probabilistic model that embeds a fully differentiable 5th-order Dormand-Prince (DP-RK45) ODE integrator into the reverse sampling process. Physics residuals are back-propagated at each denoising step to enforce the governing equations to 5th-order accuracy. A linear-scheduled guidance ramps the physics weight from zero at high noise to full strength near clean data to avoid gradient explosions on stiff systems (Jacobian eigenvalues O(10^3)). Experiments on five chaotic benchmarks (Lorenz, Rössler, hyperchaotic, Lorenz-96, Rabinovich-Fabrikant) at 10% observation density with σ=0.05 noise report up to 15.4× RMSE reduction versus unconstrained diffusion and 3.2× improvement over EnKF on the stiff Rabinovich-Fabrikant case (RMSE 0.1097±0.0269 vs. 0.3561±0.3040), with p<0.001 in Wilcoxon tests; topological validation via Rosenstein Lyapunov estimator is also provided.
Significance. If the central claims hold after verification, the work would be significant for data assimilation and state reconstruction in nonlinear chaotic systems. Combining high-order differentiable integrators with diffusion models and a schedule that purportedly stabilizes stiff dynamics without retuning or bias could address a recognized failure mode of physics-informed generative models. The reported statistical outperformance on an out-of-distribution stiff benchmark and preservation of chaotic invariants would strengthen the case for the approach over ensemble Kalman methods when covariance collapse occurs.
major comments (3)
- [Abstract / §4] Abstract and §4 (experimental protocol): the headline claim that the linear-scheduled guidance 'prevents the gradient explosions that cause naive physics-informed approaches to fail on stiff systems' and 'adds no reconstruction bias' is load-bearing for the Rabinovich-Fabrikant results, yet no gradient-norm traces, schedule ablations, or direct trajectory comparisons (with vs. without ramp) are shown for the O(10^3) eigenvalue case. The 5th-order accuracy and 3.2× EnKF improvement therefore rest on an untested neutrality assumption.
- [§3] §3 (method): the statement that the DP-RK45 integrator is 'fully differentiable' and 'constrains every generated trajectory to satisfy the system's governing equations to 5th-order accuracy' requires explicit confirmation that the automatic-differentiation path through the integrator does not introduce truncation or interpolation artifacts that accumulate across the 1000-step reverse process; no such verification or error-bound derivation appears.
- [Table 2 / §4.3] Table 2 / §4.3 (Rabinovich-Fabrikant results): the reported RMSE 0.1097 ± 0.0269 (N=30) is presented with p<0.001 versus baselines, but the manuscript does not state whether the 30 runs share the same observation realizations or use independent noise seeds; this affects whether the paired Wilcoxon test is correctly powered and whether the 8.6× improvement over diffusion is robust to observation variability.
minor comments (2)
- [§3] Notation for the physics guidance weight λ(t) is introduced without an explicit equation; a numbered equation would clarify the linear ramp from 0 to 1.
- [§4.2] The 20D Lorenz-96 experiment reports improvement but does not specify the observation density or noise level used for that system, unlike the uniform 10%/σ=0.05 stated for the other four.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help strengthen the presentation of our work. We address each major comment point by point below and commit to revisions where needed.
read point-by-point responses
-
Referee: [Abstract / §4] Abstract and §4 (experimental protocol): the headline claim that the linear-scheduled guidance 'prevents the gradient explosions that cause naive physics-informed approaches to fail on stiff systems' and 'adds no reconstruction bias' is load-bearing for the Rabinovich-Fabrikant results, yet no gradient-norm traces, schedule ablations, or direct trajectory comparisons (with vs. without ramp) are shown for the O(10^3) eigenvalue case. The 5th-order accuracy and 3.2× EnKF improvement therefore rest on an untested neutrality assumption.
Authors: We agree that direct empirical verification of the schedule's impact on gradient stability for the stiff Rabinovich-Fabrikant system would better support the claims. While the schedule was motivated by analysis of Jacobian norms and preliminary runs, the manuscript lacks the requested traces and ablations. We will add gradient-norm plots, schedule ablations, and with/without-ramp trajectory comparisons for this benchmark in the revised §4 to demonstrate prevention of explosions and absence of bias. revision: yes
-
Referee: [§3] §3 (method): the statement that the DP-RK45 integrator is 'fully differentiable' and 'constrains every generated trajectory to satisfy the system's governing equations to 5th-order accuracy' requires explicit confirmation that the automatic-differentiation path through the integrator does not introduce truncation or interpolation artifacts that accumulate across the 1000-step reverse process; no such verification or error-bound derivation appears.
Authors: The DP-RK45 implementation uses a standard differentiable ODE solver library whose adaptive stepping is fully exposed to automatic differentiation, preserving the method's 5th-order local accuracy in both forward and backward passes. However, we acknowledge that explicit confirmation of no accumulating artifacts over 1000 denoising steps is absent. We will add a dedicated verification subsection in the revised §3, including a numerical error-bound check or derivation showing that truncation remains controlled at the integrator's order. revision: yes
-
Referee: [Table 2 / §4.3] Table 2 / §4.3 (Rabinovich-Fabrikant results): the reported RMSE 0.1097 ± 0.0269 (N=30) is presented with p<0.001 versus baselines, but the manuscript does not state whether the 30 runs share the same observation realizations or use independent noise seeds; this affects whether the paired Wilcoxon test is correctly powered and whether the 8.6× improvement over diffusion is robust to observation variability.
Authors: The 30 runs were generated with independent observation noise realizations (distinct random seeds for the sparse measurements) to evaluate robustness across observation variability; the Wilcoxon test is therefore paired across these independent realizations. We will explicitly state this experimental detail in the revised §4.3 and Table 2 caption to confirm the test's validity and the robustness of the reported improvements. revision: yes
Circularity Check
No significant circularity; results rest on external benchmarks and independent integrator
full rationale
The paper embeds a standard Dormand-Prince integrator into the DDPM reverse loop and applies a linear physics-weight schedule; the reported RMSE values (e.g., 0.1097 on Rabinovich-Fabrikant) are obtained by direct comparison against separate baselines (unconstrained diffusion, EnKF) on fixed benchmark trajectories. No equation or claim reduces the performance gain to a quantity defined by the model itself, nor does any load-bearing step rely on a self-citation whose content is unverified outside the present work. The derivation chain therefore remains self-contained against external data.
Axiom & Free-Parameter Ledger
free parameters (1)
- physics guidance schedule
axioms (1)
- domain assumption Governing equations of the target system are known a priori and can be evaluated via automatic differentiation.
Reference graph
Works this paper leans on
-
[1]
Marc Bocquet and Pavel Sakov. An iterative ensemble Kalman smoother.Quarterly Journal of the Royal Meteorological Society, 138(682):1543–1556, 2012. doi: 10.1002/qj.1914
-
[2]
Steven L. Brunton, Joshua L. Proctor, and J. Nathan Kutz. Discovering governing equations from data by sparse identification of nonlinear dynamical systems.Proceedings of the National Academy of Sciences, 113(15):3932–3937, 2016. doi: 10.1073/pnas.1517384113
-
[3]
Ricky T. Q. Chen, Yulia Rubanova, Jesse Bettencourt, and David Duvenaud. Neural ordinary differential equations. InAdvances in Neural Information Processing Systems, volume 31, pages 6571–6583. Curran Associates, 2018
2018
-
[4]
GRU-ODE-Bayes: Continuous modeling of sporadically-observed time series
Edward De Brouwer, Jaak Simm, Adam Arany, and Yves Moreau. GRU-ODE-Bayes: Continuous modeling of sporadically-observed time series. InAdvances in Neural Information Processing Systems, volume 32, pages 7377–7388. Curran Associates, 2019
2019
-
[5]
Diffusion models beat GANs on image synthesis
Prafulla Dhariwal and Alexander Nichol. Diffusion models beat GANs on image synthesis. InAdvances in Neural Information Processing Systems, volume 34, pages 8780–8794. Curran Associates, 2021
2021
-
[6]
John R. Dormand and Peter J. Prince. A family of embedded Runge-Kutta formulae.Journal of Computational and Applied Mathematics, 6(1):19–26, 1980. doi: 10.1016/0771-050X(80)90013-3
-
[7]
Ergodic theory of chaos and strange attractors.Reviews of Modern Physics, 57(3):617–656, 1985
Jean-Pierre Eckmann and David Ruelle. Ergodic theory of chaos and strange attractors.Reviews of Modern Physics, 57(3):617–656, 1985. doi: 10.1103/RevModPhys.57.617
-
[8]
Geir Evensen. Sequential data assimilation with a nonlinear quasi-geostrophic model using Monte Carlo methods to forecast error statistics.Journal of Geophysical Research: Oceans, 99(C5): 10143–10162, 1994. doi: 10.1029/94JC00572
-
[9]
Springer, Berlin, Heidelberg, 2nd edition, 2009
Geir Evensen.Data Assimilation: The Ensemble Kalman Filter. Springer, Berlin, Heidelberg, 2nd edition, 2009. doi: 10.1007/978-3-642-03711-5
-
[10]
Mackey.From Clocks to Chaos: The Rhythms of Life
Leon Glass and Michael C. Mackey.From Clocks to Chaos: The Rhythms of Life. Princeton University Press, Princeton, NJ, 1988
1988
-
[11]
Measuring the strangeness of strange attractors.Physica D: Nonlinear Phenomena, 9(1–2):189–208, 1983
Peter Grassberger and Itamar Procaccia. Measuring the strangeness of strange attractors.Physica D: Nonlinear Phenomena, 9(1–2):189–208, 1983. doi: 10.1016/0167-2789(83)90298-1
-
[12]
Denoising diffusion probabilistic models
Jonathan Ho, Ajay Jain, and Pieter Abbeel. Denoising diffusion probabilistic models. InAdvances in Neural Information Processing Systems, volume 33, pages 6840–6851. Curran Associates, 2020
2020
-
[13]
Long short-term memory.Neural Computation, 9(8):1735–1780, 1997
Sepp Hochreiter and J¨ urgen Schmidhuber. Long short-term memory.Neural Computation, 9(8): 1735–1780, 1997. doi: 10.1162/neco.1997.9.8.1735
-
[14]
Peter L. Houtekamer and Herschel L. Mitchell. Ensemble Kalman filtering.Quarterly Journal of the Royal Meteorological Society, 131(613):3269–3289, 2005. doi: 10.1256/qj.05.135
-
[15]
Diffusionpde: Generative pde-solving under partial observation.Advances in Neural Information Processing Systems, 37: 130291–130323, 2024
Jiahe Huang, Guandao Yang, Zichen Wang, and Jeong Joon Park. Diffusionpde: Generative pde-solving under partial observation.Advances in Neural Information Processing Systems, 37: 130291–130323, 2024
2024
-
[16]
echo state
Herbert Jaeger. The “echo state” approach to analysing and training recurrent neural networks. Technical Report 148, German National Research Center for Information Technology (GMD), Sankt Augustin, Germany, 2001. 23
2001
-
[17]
Rudolf E. Kalman. A new approach to linear filtering and prediction problems.Journal of Basic Engineering, 82(1):35–45, 1960. doi: 10.1115/1.3662552
-
[18]
George Em Karniadakis, Ioannis G. Kevrekidis, Lu Lu, Paris Perdikaris, Sifan Wang, and Liu Yang. Physics-informed machine learning.Nature Reviews Physics, 3(6):422–440, 2021. doi: 10.1038/s42254-021-00314-5
-
[19]
Edward N. Lorenz. Deterministic nonperiodic flow.Journal of the Atmospheric Sciences, 20(2): 130–141, 1963. doi: 10.1175/1520-0469(1963)020⟨0130:DNF⟩2.0.CO;2
-
[20]
Edward N. Lorenz. Predictability: a problem partly solved. InProceedings of the ECMWF Seminar on Predictability, volume 1, pages 1–18, Reading, UK, 1996. European Centre for Medium-Range Weather Forecasts
1996
-
[21]
Hunt, Michelle Girvan, and Edward Ott
Jaideep Pathak, Zhixin Lu, Brian R. Hunt, Michelle Girvan, and Edward Ott. Model-free prediction of large spatiotemporally chaotic systems from data: A reservoir computing approach. Physical Review Letters, 120(2):024102, 2018. doi: 10.1103/PhysRevLett.120.024102
-
[22]
Rabinovich and Anatoly L
Mikhail I. Rabinovich and Anatoly L. Fabrikant. Stochastic self-modulation of waves in nonequi- librium media.Soviet Physics JETP, 77:617–629, 1979
1979
-
[23]
Maziar Raissi, Paris Perdikaris, and George E. Karniadakis. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations.Journal of Computational Physics, 378:686–707, 2019. doi: 10.1016/j.jcp. 2018.10.045
-
[24]
U-Net: Convolutional networks for biomedical image segmentation
Olaf Ronneberger, Philipp Fischer, and Thomas Brox. U-Net: Convolutional networks for biomedical image segmentation. InMedical Image Computing and Computer-Assisted Intervention (MICCAI), volume 9351, pages 234–241. Springer, 2015. doi: 10.1007/978-3-319-24574-4 28
-
[25]
Michael T. Rosenstein, James J. Collins, and Carlo J. De Luca. A practical method for calculating largest Lyapunov exponents from small data sets.Physica D: Nonlinear Phenomena, 65(1–2): 117–134, 1993. doi: 10.1016/0167-2789(93)90009-P
-
[26]
Otto E. R¨ ossler. An equation for continuous chaos.Physics Letters A, 57(5):397–398, 1976. doi: 10.1016/0375-9601(76)90101-8
-
[27]
Otto E. R¨ ossler. An equation for hyperchaos.Physics Letters A, 71(2–3):155–157, 1979. doi: 10.1016/0375-9601(79)90150-6
-
[28]
Yulia Rubanova, Ricky T. Q. Chen, and David Duvenaud. Latent ordinary differential equations for irregularly-sampled time series. InAdvances in Neural Information Processing Systems, volume 32, pages 5321–5331. Curran Associates, 2019
2019
-
[29]
Weiss, Niru Maheswaranathan, and Surya Ganguli
Jascha Sohl-Dickstein, Eric A. Weiss, Niru Maheswaranathan, and Surya Ganguli. Deep unsuper- vised learning using nonequilibrium thermodynamics. InProceedings of the 32nd International Conference on Machine Learning (ICML), pages 2256–2265. PMLR, 2015
2015
-
[30]
Denoising diffusion implicit models
Jiaming Song, Chenlin Meng, and Stefano Ermon. Denoising diffusion implicit models. In International Conference on Learning Representations (ICLR), 2021
2021
-
[31]
Strogatz.Nonlinear Dynamics and Chaos: With Applications to Physics, Biology, Chemistry, and Engineering
Steven H. Strogatz.Nonlinear Dynamics and Chaos: With Applications to Physics, Biology, Chemistry, and Engineering. CRC Press, Boca Raton, FL, 3rd edition, 2024. doi: 10.1201/ 9780429492563
2024
-
[32]
Detecting strange attractors in turbulence
Floris Takens. Detecting strange attractors in turbulence. InDynamical Systems and Turbulence, Warwick 1980, volume 898 ofLecture Notes in Mathematics, pages 366–381. Springer, Berlin, Heidelberg, 1981. doi: 10.1007/BFb0091924. 24
-
[33]
CSDI: Conditional score-based diffusion models for probabilistic time series imputation
Yusuke Tashiro, Jiaming Song, Yang Song, and Stefano Ermon. CSDI: Conditional score-based diffusion models for probabilistic time series imputation. InAdvances in Neural Information Processing Systems, volume 34, pages 24804–24816. Curran Associates, 2021
2021
-
[34]
Attention is all you need.Advances in neural information processing systems, 30, 2017
Ashish Vaswani, Noam Shazeer, Niki Parmar, Jakob Uszkoreit, Llion Jones, Aidan N Gomez, Lukasz Kaiser, and Illia Polosukhin. Attention is all you need.Advances in neural information processing systems, 30, 2017
2017
-
[35]
Individual comparisons by ranking methods.Biometrics Bulletin, 1(6):80–83,
Frank Wilcoxon. Individual comparisons by ranking methods.Biometrics Bulletin, 1(6):80–83,
-
[36]
doi: 10.2307/3001968
-
[37]
Alan Wolf, Jack B. Swift, Harry L. Swinney, and John A. Vastano. Determining Lyapunov exponents from a time series.Physica D: Nonlinear Phenomena, 16(3):285–317, 1985. doi: 10.1016/0167-2789(85)90011-9. 25
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.