Look Further: Socially-Compliant Navigation System in Residential Buildings
Pith reviewed 2026-06-29 16:57 UTC · model grok-4.3
The pith
A delivery robot improves human ratings of safety, smoothness and politeness by shifting lanes at eight meters from oncoming people in straight hallways.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By extending the robot's reaction distance beyond eight meters and using a proactive lane-change motion pattern, the robot produces measurably higher participant ratings on safety, smoothness, and politeness in straight hallway encounters than conventional short-range behaviors such as slowing down, stopping, or collision avoidance near the person.
What carries the argument
Proactive Lane-Changing (PLC) pattern that moves the robot from the hallway center to the side when an oncoming person is detected at an eight-meter distance.
If this is right
- Residential delivery robots can improve perceived service quality by planning lateral shifts well before personal-space distances.
- Standard reactive methods that act only near a person are outperformed in straight paths by earlier lateral repositioning.
- Intersection scenarios require additional motion cues because early lane changes alone do not produce consistent preference gains.
Where Pith is reading between the lines
- Human judgments of robot motion appear to incorporate anticipation over distances larger than physical interaction ranges.
- Long-range sensing and prediction may become necessary components for socially acceptable indoor navigation systems.
- Preference diversity at corners suggests that environmental geometry interacts with timing to shape perception.
Load-bearing premise
Observed rating differences arise from the eight-meter reaction distance and lane-change timing rather than from uncontrolled differences in robot speed, lighting, or participant expectations.
What would settle it
A follow-up study that matches speed profiles, lighting, and participant instructions exactly across conditions and finds no rating difference between the eight-meter lane change and the short-range baselines.
Figures
read the original abstract
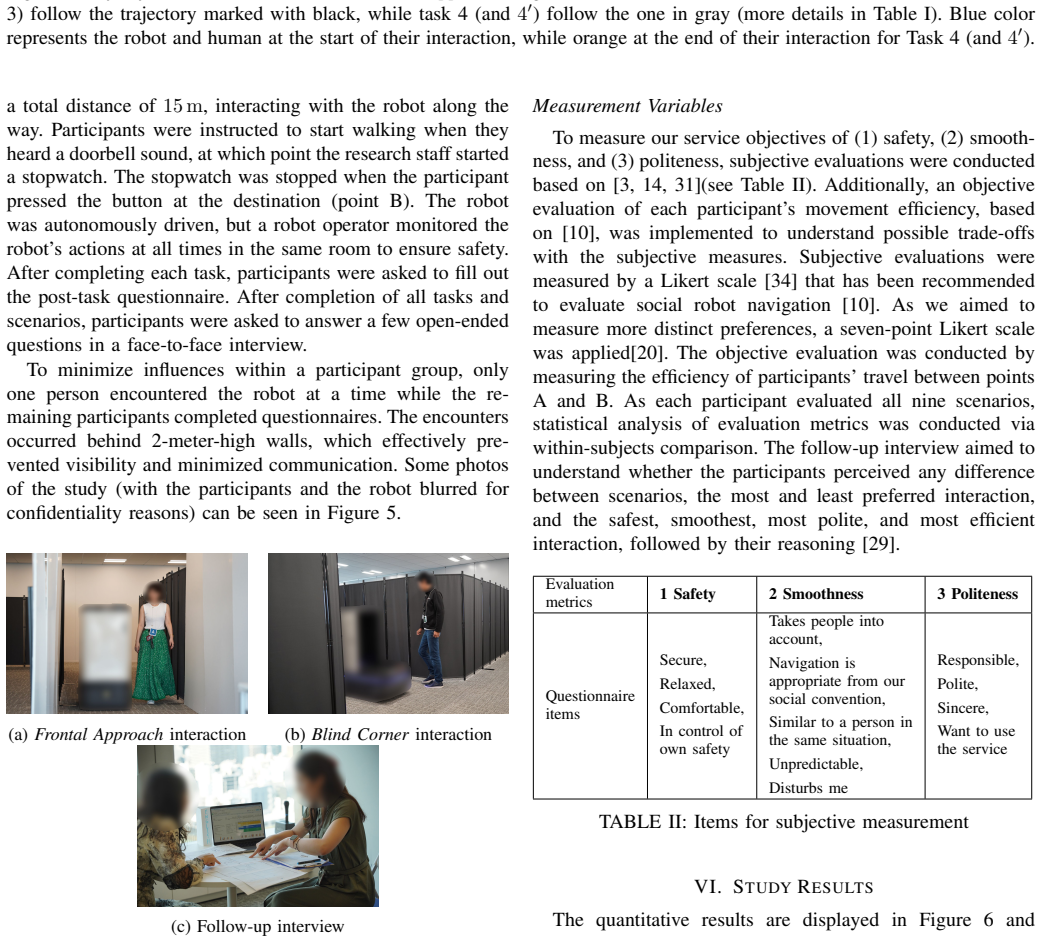
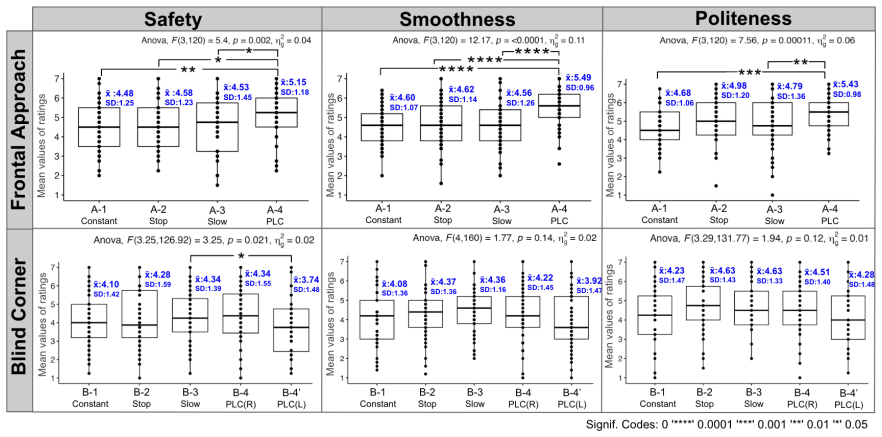
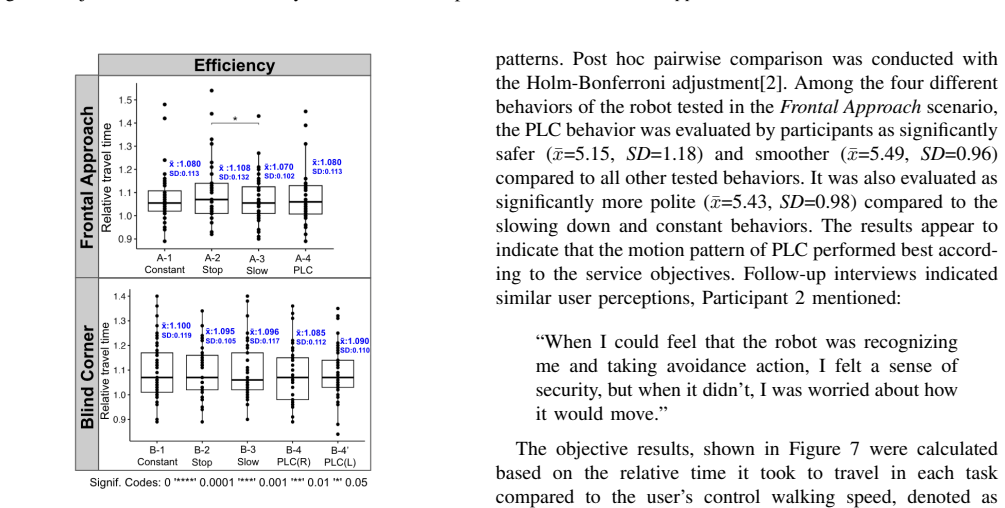
The distance at which a mobile robot reacts to a person strongly impacts various qualities of the human-robot interaction. In this paper, we focus on the navigation of a mobile delivery robot platform in a residential indoor hallway environment. Social navigation methods typically focus on avoiding uncomfortable human-robot interactions, such as when a robot encroaches on someone's personal space. Since personal space has been shown to be in the range of just a few meters, social navigation methods typically focus on deconflicting and resolving these short-range interactions. In this work, however, we demonstrate that by extending the reaction distance to over eight meters, far beyond the typical interaction distance, we can improve the human's perception of the robot's motion. We introduce the Proactive Lane-Changing (PLC) motion pattern and a navigation system that leverages it to react to people at an increased distance. This pattern consists of changing the robot's lateral position as it navigates down the hallway from the center to the side at an eight-meter distance from an oncoming person. We conducted a user study with 42 participants to assess their impressions of the delivery robot based on three service objectives: safety, smoothness, and politeness. In the straight hallway scenario (Frontal Approach), results showed significant improvement in each of these three objectives compared to typical motion patterns found in the literature: slowing down, stopping, and reactive collision avoidance in the proximity of a person. In contrast, in the intersection (Blind Corner) scenarios, none of the approaches performed significantly better than any other, with participants having a diverse range of preferences among robot motion patterns.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that extending a mobile delivery robot's reaction distance to over eight meters via a Proactive Lane-Changing (PLC) pattern—shifting laterally from hallway center to side—improves human perceptions of safety, smoothness, and politeness in residential indoor navigation. This is contrasted with typical short-range methods (slowing down, stopping, reactive collision avoidance). A 42-participant user study reports statistically significant gains for PLC in the straight-hallway (Frontal Approach) scenario across all three objectives, but no significant differences among approaches in blind-corner (intersection) scenarios.
Significance. If the central empirical claim holds after clarification of controls, the work supplies concrete evidence that long-range proactive behaviors can outperform conventional short-range social navigation in hallway settings. The 42-participant study with explicit service objectives (safety/smoothness/politeness) and scenario differentiation is a clear strength, providing falsifiable, human-centered data that could guide future navigation algorithm design in shared indoor spaces.
major comments (2)
- [User Study section] User Study section: the abstract and results paragraph report 'significant improvement' in the three objectives for the Frontal Approach but supply no information on the statistical tests used, power analysis, counterbalancing of conditions, or exact participant motion parameters. These omissions are load-bearing because they prevent independent verification that the observed rating differences are attributable to the eight-meter PLC reaction distance rather than study design artifacts.
- [User Study section] User Study section, condition descriptions: the manuscript contrasts PLC against 'slowing down, stopping, and reactive collision avoidance' without stating that all four motion patterns were matched on velocity profile, acceleration limits, path curvature, or total travel time. This directly engages the stress-test concern; any mismatch would allow the rating gains to be explained by incidental dynamics rather than the extended reaction distance, undermining the central claim.
minor comments (1)
- [Abstract] Abstract: the phrase 'typical motion patterns found in the literature' would benefit from one or two explicit citations to prior work on slowing-down or stopping behaviors to anchor the comparison.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive feedback on the user study. The comments highlight important points for improving the clarity and verifiability of our empirical results. We address each major comment below and will revise the manuscript to incorporate the requested details.
read point-by-point responses
-
Referee: [User Study section] User Study section: the abstract and results paragraph report 'significant improvement' in the three objectives for the Frontal Approach but supply no information on the statistical tests used, power analysis, counterbalancing of conditions, or exact participant motion parameters. These omissions are load-bearing because they prevent independent verification that the observed rating differences are attributable to the eight-meter PLC reaction distance rather than study design artifacts.
Authors: We agree the abstract and results paragraph omit these details. The full manuscript describes a within-subjects design with 42 participants and reports statistically significant differences, but does not explicitly list the tests, power analysis, counterbalancing procedure, or motion parameters in those sections. We will expand the User Study section (and update the abstract if space permits) to include the statistical tests (e.g., specific non-parametric tests with p-values and effect sizes), power analysis, counterbalancing method, and exact motion parameters. This revision will enable independent verification that the gains are attributable to the extended reaction distance. revision: yes
-
Referee: [User Study section] User Study section, condition descriptions: the manuscript contrasts PLC against 'slowing down, stopping, and reactive collision avoidance' without stating that all four motion patterns were matched on velocity profile, acceleration limits, path curvature, or total travel time. This directly engages the stress-test concern; any mismatch would allow the rating gains to be explained by incidental dynamics rather than the extended reaction distance, undermining the central claim.
Authors: We acknowledge that the manuscript does not explicitly state matching across the four patterns on velocity profile, acceleration limits, path curvature, or travel time. Our implementation aimed to keep average velocity and acceleration comparable while varying only the reaction distance and lateral shift for PLC; however, this matching was not documented. We will revise the condition descriptions to explicitly report the matching criteria and provide the specific parameters (velocity, acceleration bounds, curvature, and travel times) used for each pattern, thereby isolating the effect of the eight-meter proactive behavior. revision: yes
Circularity Check
Empirical user study contains no derivation chain or fitted predictions.
full rationale
The paper describes an empirical user study (42 participants) comparing three service objectives across robot motion patterns in hallway scenarios. The PLC pattern is introduced descriptively as a lateral position change at eight meters; results are reported as statistical improvements in ratings versus baselines. No equations, parameter fits, model predictions, or self-citation chains appear in the provided text. All load-bearing claims rest on experimental data rather than any reduction of outputs to inputs by construction, satisfying the self-contained criterion for score 0.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
URL https://spacecraft.ssl.umd.edu/ design lib/SSP50005rC.ISS crew integ.pdf
National Aeronautics and Texas Space Administration Space Station Program Office Johnson Space Cen- ter Houston, 1999. URL https://spacecraft.ssl.umd.edu/ design lib/SSP50005rC.ISS crew integ.pdf. Accessed: 2024-09-13
1999
-
[2]
Codjo Emile Agbangba, Edmond Sacla Aide, Hermann Honfo, and Romain Gl `el`e Kakai. On the use of post- hoc tests in environmental and biological sciences: A critical review.Heliyon, 10(3):e25131, 2024. ISSN 2405-8440. doi: https://doi.org/10.1016/j.heliyon.2024. e25131. URL https://www.sciencedirect.com/science/ article/pii/S2405844024011629
-
[3]
Neziha Akalin, Annica Kristoffersson, and Amy Loutfi. Do you feel safe with your robot? factors influencing perceived safety in human-robot interaction based on subjective and objective measures.International Journal of Human-Computer Studies, 158:102744, 2022. ISSN 1071-5819. doi: https://doi.org/10.1016/j.ijhcs.2021. 102744. URL https://www.sciencedirec...
-
[4]
URL https://www.woven-city
Toyota Woven City, 2024. URL https://www.woven-city. global/. Accessed: 2024-09-01
2024
-
[5]
Openmmlab pose estimation toolbox and benchmark
MMPose Contributors. Openmmlab pose estimation toolbox and benchmark. https://github.com/open-mmlab/ mmpose, 2020. Accessed: 2024-09-15
2020
-
[6]
Influence of emotional motions in human-robot interactions
Magda Dubois, Josep-Arnau Claret, Luis Basa ˜nez, and Gentiane Venture. Influence of emotional motions in human-robot interactions. In Dana Kuli ´c, Yoshihiko Nakamura, Oussama Khatib, and Gentiane Venture, ed- itors,2016 International Symposium on Experimental Robotics, pages 799–808, Cham, 2017. Springer Inter- national Publishing
2016
-
[7]
Field trial of an autonomous shopworker robot that aims to provide friendly encour- agement and exert social pressure
Sachi Edirisinghe, Satoru Satake, Drazen Brscic, Yuyi Liu, and Takayuki Kanda. Field trial of an autonomous shopworker robot that aims to provide friendly encour- agement and exert social pressure. InProceedings of the 2024 ACM/IEEE International Conference on Human- Robot Interaction, pages 194–202, 2024
2024
-
[8]
De- signing a robot guide for blind people in indoor environ- ments
Catherine Feng, Shiri Azenkot, and Maya Cakmak. De- signing a robot guide for blind people in indoor environ- ments. InProceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction Extended Abstracts, HRI’15 Extended Abstracts, page 107–108, New York, NY , USA, 2015. Association for Computing Machinery. ISBN 9781450333184. d...
-
[9]
D. Fox, W. Burgard, and S. Thrun. The dynamic window approach to collision avoidance.IEEE Robotics & Automation Magazine, 4(1):23–33, 1997. doi: 10.1109/ 100.580977
1997
-
[10]
Anthony Francis, Claudia P ´erez-D’Arpino, Chengshu Li, Fei Xia, Alexandre Alahi, Rachid Alami, Aniket Bera, Abhijat Biswas, Joydeep Biswas, Rohan Chandra, Hao-Tien Lewis Chiang, Michael Everett, Sehoon Ha, Justin W. Hart, Jonathan P. How, Haresh Karnan, Tsang- Wei Edward Lee, Luis J. Manso, Reuth Mirksy, Soeren Pirk, Phani Teja Singamaneni, Peter Stone, ...
-
[11]
Using the driving behavior of an automated vehicle to communicate intentions - a wizard of oz study
Tanja Fuest, Lars Michalowski, Luca Tr ¨aris, Hanna Bellem, and Klaus Bengler. Using the driving behavior of an automated vehicle to communicate intentions - a wizard of oz study. In2018 21st International Confer- ence on Intelligent Transportation Systems (ITSC), pages 3596–3601, 2018. doi: 10.1109/ITSC.2018.8569486
-
[12]
Jasper Geldenbott and Karen Leung. Legible and proac- tive robot planning for prosocial human-robot interac- tions.arXiv preprint arXiv:2404.03734, 2024
-
[13]
What makes human so different? analysis of human-humanoid robot interac- tion with a super wizard of oz platform
Guillaume Gibert, Maxime Petit, Florian Lance, Gr ´egoire Pointeau, and Peter Ford Dominey. What makes human so different? analysis of human-humanoid robot interac- tion with a super wizard of oz platform. InInternational Conference on Intelligent Robots and Systems, 2013
2013
-
[14]
Calderita, Alejandro Hidalgo-Paniagua, and Juan P
Silvia Guill ´en Ruiz, Luis V . Calderita, Alejandro Hidalgo-Paniagua, and Juan P. Bandera Rubio. Mea- suring smoothness as a factor for efficient and socially accepted robot motion.Sensors, 20(23), 2020. ISSN 1424-8220. doi: 10.3390/s20236822. URL https://www. mdpi.com/1424-8220/20/23/6822
-
[15]
LiDAR-based detection, tracking, and property estimation: A contemporary review
Mahmudul Hasan, Junichi Hanawa, Riku Goto, Ryota Suzuki, Hisato Fukuda, Yoshinori Kuno, and Yoshi- nori Kobayashi. LiDAR-based detection, tracking, and property estimation: A contemporary review. 506:393–
-
[16]
ISSN 09252312. doi: 10.1016/j.neucom.2022. 07.087. URL https://linkinghub.elsevier.com/retrieve/pii/ S0925231222009365
-
[17]
Social force model for pedestrian dynamics.Physical review E, 51(5):4282, 1995
Dirk Helbing and Peter Molnar. Social force model for pedestrian dynamics.Physical review E, 51(5):4282, 1995
1995
-
[18]
Technical methods for social robots in museum settings: An overview of the literature
Mehdi Hellou, JongYoon Lim, Norina Gasteiger, Minsu Jang, and Ho Seok Ahn. Technical methods for social robots in museum settings: An overview of the literature. International Journal of Social Robotics, 14(8):1767– 1786, 2022
2022
-
[19]
Learning to navigate through crowded envi- ronments
Peter Henry, Christian V ollmer, Brian Ferris, and Di- eter Fox. Learning to navigate through crowded envi- ronments. In2010 IEEE international conference on robotics and automation, pages 981–986. IEEE, 2010
2010
-
[20]
Dan Jia, Mats Steinweg, Alexander Hermans, and Bas- tian Leibe. Self-supervised person detection in 2d range data using a calibrated camera. In2021 IEEE International Conference on Robotics and Automation (ICRA), page 13301–13307. IEEE Press, 2021. doi: 10.1109/ICRA48506.2021.9561699. URL https://doi. org/10.1109/ICRA48506.2021.9561699
-
[21]
Ankur Joshi, Saket Kale, Satish Chandel, and Dinesh Pal. Likert scale: Explored and explained.British Journal of Applied Science & Technology, 7:396–403, 01 2015. doi: 10.9734/BJAST/2015/14975
-
[22]
A preliminary study of interactive navigation framework with situation-adaptive multimodal induce- ment: Pass-by scenario.International Journal of Social Robotics, 12:567–588, 2020
Mitsuhiro Kamezaki, Ayano Kobayashi, Yuta Yokoyama, Hayato Yanagawa, Moondeep Shrestha, and Shigeki Sugano. A preliminary study of interactive navigation framework with situation-adaptive multimodal induce- ment: Pass-by scenario.International Journal of Social Robotics, 12:567–588, 2020
2020
-
[23]
URL https://www.datanovia.com/en/lessons/ repeated-measures-anova-in-r/
Alboukadel Kassambara, 2019. URL https://www.datanovia.com/en/lessons/ repeated-measures-anova-in-r/. Accessed: 2024-09- 11
2019
-
[24]
Guiding preferred driving style using voice in au- tonomous vehicles: An on-road wizard-of-oz study
Keunwoo Kim, Minjung Park, and Youn-kyung Lim. Guiding preferred driving style using voice in au- tonomous vehicles: An on-road wizard-of-oz study. In Proceedings of the 2021 ACM Designing Interactive Systems Conference, DIS ’21, page 352–364, New York, NY , USA, 2021. Association for Computing Machinery. ISBN 9781450384766. doi: 10.1145/3461778.3462056. ...
-
[25]
Phd thesis, Carnegie Mellon University, June 2010
Rachel Kirby.Social robot navigation. Phd thesis, Carnegie Mellon University, June 2010. Available at https://www.ri.cmu.edu/pub files/2010/5/rk thesis.pdf
2010
-
[26]
Com- panion: A constraint-optimizing method for person- acceptable navigation
Rachel Kirby, Reid Simmons, and Jodi Forlizzi. Com- panion: A constraint-optimizing method for person- acceptable navigation. InRO-MAN 2009 - The 18th IEEE International Symposium on Robot and Human Interactive Communication, pages 607–612, 2009. doi: 10.1109/ROMAN.2009.5326271
-
[27]
Segment anything
Alexander Kirillov, Eric Mintun, Nikhila Ravi, Hanzi Mao, Chloe Rolland, Laura Gustafson, Tete Xiao, Spencer Whitehead, Alexander C Berg, Wan-Yen Lo, et al. Segment anything. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 4015–4026, 2023
2023
-
[28]
Physiological data-based evaluation of a social robot navigation system
Hasan Kivrak, Pinar Uluer, Hatice Kose, Elif Gumuslu, Duygun Erol Barkana, Furkan Cakmak, and Sirma Yavuz. Physiological data-based evaluation of a social robot navigation system. In2020 29th IEEE Inter- national Conference on Robot and Human Interactive Communication (RO-MAN), pages 994–999, 2020. doi: 10.1109/RO-MAN47096.2020.9223539
-
[29]
Socially compliant mobile robot navigation via inverse reinforcement learning.The In- ternational Journal of Robotics Research, 35(11):1289– 1307, 2016
Henrik Kretzschmar, Markus Spies, Christoph Sprunk, and Wolfram Burgard. Socially compliant mobile robot navigation via inverse reinforcement learning.The In- ternational Journal of Robotics Research, 35(11):1289– 1307, 2016
2016
-
[30]
Po- liteness in human–robot interaction: A multi-experiment study with non-humanoid robots.International Jour- nal of Social Robotics, 14, 08 2022
Shikhar Kumar, Eliran Itzhak, Yael Edan, Galit Nimrod, Vardit Sarne-Fleischmann, and Noam Tractinsky. Po- liteness in human–robot interaction: A multi-experiment study with non-humanoid robots.International Jour- nal of Social Robotics, 14, 08 2022. doi: 10.1007/ s12369-022-00911-z
2022
-
[31]
A wizard-of-oz study of curiosity in human-robot interaction
Edith Law, Vicky Cai, Qi Feng Liu, Sajin Sasy, Joslin Goh, Alex Blidaru, and Dana Kuli ´c. A wizard-of-oz study of curiosity in human-robot interaction. In2017 26th IEEE International Symposium on Robot and Hu- man Interactive Communication (RO-MAN), pages 607– 614, 2017. doi: 10.1109/ROMAN.2017.8172365
-
[32]
The effect of politeness strategy on human- robot collaborative interaction on malfunction of robot vacuum cleaner
Yeoreum Lee, Jae-eul Bae, Sona S Kwak, and Myung- Suk Kim. The effect of politeness strategy on human- robot collaborative interaction on malfunction of robot vacuum cleaner. InRSS workshop on HRI, 2011
2011
-
[33]
Benedikt Leichtmann and Verena Nitsch. How much distance do humans keep toward robots? literature re- view, meta-analysis, and theoretical considerations on personal space in human-robot interaction.Journal of Environmental Psychology, 68:101386, 2020. ISSN 0272-4944. doi: https://doi.org/10.1016/j.jenvp.2019. 101386. URL https://www.sciencedirect.com/sci...
-
[34]
The marathon 2: A navigation system
Steve Macenski, Francisco Mart ´ın, Ruffin White, and Jonatan Gin ´es Clavero. The marathon 2: A navigation system. In2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 2718–2725. IEEE, 2020
2020
-
[35]
Relationships between ignoring instructions and response bias when completing ques- tionnaires.The Japanese Journal of Psychology, 87(4): 354–363, 2016
Shinya Masuda, Takayuki Sakagami, Kazuyo Kitaoka, and Megumi Sasaki. Relationships between ignoring instructions and response bias when completing ques- tionnaires.The Japanese Journal of Psychology, 87(4): 354–363, 2016. (in Japanese)
2016
-
[36]
Core challenges of social robot navigation: A survey.ACM Transactions on Human-Robot Interac- tion, 12(3):1–39, 2023
Christoforos Mavrogiannis, Francesca Baldini, Allan Wang, Dapeng Zhao, Pete Trautman, Aaron Steinfeld, and Jean Oh. Core challenges of social robot navigation: A survey.ACM Transactions on Human-Robot Interac- tion, 12(3):1–39, 2023
2023
-
[37]
A wizard of oz study on passengers’ experiences of a robo-taxi service in real-life settings
Johanna Meurer, Christina Pakusch, Gunnar Stevens, Dave Randall, and V olker Wulf. A wizard of oz study on passengers’ experiences of a robo-taxi service in real-life settings. InProceedings of the 2020 ACM Designing Interactive Systems Conference, DIS ’20, page 1365–1377, New York, NY , USA, 2020. Association for Computing Machinery. ISBN 9781450369749. ...
-
[38]
URL https://laws.e-gov.go.jp/law/ 325CO0000000338/20230526 504CO0000000393# Mp-Ch 5-Se 2
Transport Ministry of Land, Infrastructure and Tourism, 2023. URL https://laws.e-gov.go.jp/law/ 325CO0000000338/20230526 504CO0000000393# Mp-Ch 5-Se 2. Accessed: 2024-09-13
2023
-
[39]
Understanding driver-automated vehicle interactions through wizard of oz design improvisation
Brian Ka-Jun Mok, David Sirkin, Srinath Sibi, David Bryan Miller, and Wendy Ju. Understanding driver-automated vehicle interactions through wizard of oz design improvisation. volume 8, pages 380–
-
[40]
doi: 10.17077/ drivingassessment.1598
University of Iowa, 6 2015. doi: 10.17077/ drivingassessment.1598. URL https://pubs.lib.uiowa.edu/ driving/article/id/28548/
2015
-
[41]
M. A. Viraj J. Muthugala, Ayyalusami Vengadesh, Xinke Wu, Mohan Rajesh Elara, Masami Iwase, Lingyun Sun, and Jiang Hao. Expressing attention requirement of a floor cleaning robot through interactive lights.Au- tomation in Construction, 110:103015, 2020. ISSN 0926-5805. doi: https://doi.org/10.1016/j.autcon.2019. 103015. URL https://www.sciencedirect.com/s...
-
[42]
Trajectory mod- ification considering dynamic constraints of autonomous robots
Christoph Roesmann, Wendelin Feiten, Thomas Woesch, Frank Hoffmann, and Torsten Bertram. Trajectory mod- ification considering dynamic constraints of autonomous robots. InROBOTIK 2012; 7th German Conference on Robotics, pages 1–6, 2012
2012
-
[43]
How cognitive heuristics can explain social interactions in spatial movement.Journal of the Royal Society Interface, 13(121):20160439, 2016
Michael J Seitz, Nikolai WF Bode, and Gerta K ¨oster. How cognitive heuristics can explain social interactions in spatial movement.Journal of the Royal Society Interface, 13(121):20160439, 2016
2016
-
[44]
Vint: A foundation model for visual navigation.arXiv preprint arXiv:2306.14846, 2023
Dhruv Shah, Ajay Sridhar, Nitish Dashora, Kyle Sta- chowicz, Kevin Black, Noriaki Hirose, and Sergey Levine. ViNT: A foundation model for visual navigation. In7th Annual Conference on Robot Learning, 2023. URL https://arxiv.org/abs/2306.14846
-
[45]
Behavior of delivery robot in human-robot collaborative spaces during navigation
Kiran Jot Singh, Divneet Singh Kapoor, Mohamed Abouhawwash, Jehad F Al-Amri, Shubham Mahajan, and Amit Kant Pandit. Behavior of delivery robot in human-robot collaborative spaces during navigation. Intelligent Automation & Soft Computing, 35(1), 2023
2023
-
[46]
Video prototyping in human-robot interaction: results from a qualitative study
Dag Sverre Syrdal, Nuno Otero, and Kerstin Dautenhahn. Video prototyping in human-robot interaction: results from a qualitative study. InProceedings of the 15th European Conference on Cognitive Ergonomics: The Ergonomics of Cool Interaction, ECCE ’08, New York, NY , USA, 2008. Association for Computing Machinery. ISBN 9781605583990. doi: 10.1145/1473018.1...
-
[47]
Wizard of oz vs autonomous: Chil- dren’s perception changes according to robot’s operation condition
Daniel Tozadore, Adam Pinto, Roseli Romero, and Gabriele Trovato. Wizard of oz vs autonomous: Chil- dren’s perception changes according to robot’s operation condition. In2017 26th IEEE International Symposium on Robot and Human Interactive Communication (RO- MAN), pages 664–669, 2017. doi: 10.1109/ROMAN. 2017.8172374
-
[48]
Tsui, Munjal Desai, and Holly A
Katherine M. Tsui, Munjal Desai, and Holly A. Yanco. Considering the bystander’s perspective for indirect human-robot interaction. In2010 5th ACM/IEEE Inter- national Conference on Human-Robot Interaction (HRI), pages 129–130, 2010. doi: 10.1109/HRI.2010.5453230
-
[49]
The double sphere camera model
Vladyslav Usenko, Nikolaus Demmel, and Daniel Cre- mers. The double sphere camera model. In2018 International Conference on 3D Vision (3DV), pages 552–560. IEEE, 2018
2018
-
[50]
Reciprocal n-body collision avoidance
Jur Van Den Berg, Stephen J Guy, Ming Lin, and Dinesh Manocha. Reciprocal n-body collision avoidance. In Robotics Research: The 14th International Symposium ISRR, pages 3–19. Springer, 2011
2011
-
[51]
Attention is all you need
Ashish Vaswani, Noam Shazeer, Niki Parmar, Jakob Uszkoreit, Llion Jones, Aidan N Gomez, Ł ukasz Kaiser, and Illia Polosukhin. Attention is all you need. In I. Guyon, U. V on Luxburg, S. Bengio, H. Wallach, R. Fergus, S. Vishwanathan, and R. Garnett, editors, Advances in Neural Information Processing Systems, volume 30. Curran Associates, Inc., 2017. URL h...
2017
-
[52]
Michael Walters, Kerstin Dautenhahn, Kheng Koay, Christina Kaouri, Rene Boekhorst, Chrystopher Nehaniv, Iain Werry, and D. Lee. Close encounters: spatial distances between people and a robot of mechanistic appearance. pages 450 – 455, 02 2005. ISBN 0-7803- 9320-1. doi: 10.1109/ICHR.2005.1573608
-
[53]
Yolov7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors
Chien-Yao Wang, Alexey Bochkovskiy, and Hong- Yuan Mark Liao. Yolov7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 7464– 7475, June 2023
2023
-
[54]
Qureshi, Anthony Simeonov, Mayur J
Grady Williams, Paul Drews, Brian Goldfain, James M. Rehg, and Evangelos A. Theodorou. Aggressive driving with model predictive path integral control. In2016 IEEE International Conference on Robotics and Automation (ICRA), pages 1433–1440, 2016. doi: 10.1109/ICRA. 2016.7487277
-
[55]
Learning model predictive controllers with real-time attention for real-world navigation
Xuesu Xiao, Tingnan Zhang, Krzysztof Marcin Choro- manski, Tsang-Wei Edward Lee, Anthony Francis, Jake Varley, Stephen Tu, Sumeet Singh, Peng Xu, Fei Xia, Sven Mikael Persson, Dmitry Kalashnikov, Leila Takayama, Roy Frostig, Jie Tan, Carolina Parada, and Vikas Sindhwani. Learning model predictive controllers with real-time attention for real-world navigat...
2023
-
[56]
Fan Xu, Duanduan Liu, Chao Zhou, and Jing Hu. Robotic delivery worker in the dark: Assessment of perceived safety from sidewalk autonomous delivery robots’ lighting colors.Applied Sciences, 14(14), 2024. ISSN 2076-3417. doi: 10.3390/app14145983. URL https://www.mdpi.com/2076-3417/14/14/5983
-
[57]
Zamfirescu-Pereira, David Sirkin, David Goedicke, Ray LC, Natalie Friedman, Ilan Mandel, Nikolas Marte- laro, and Wendy Ju
J.D. Zamfirescu-Pereira, David Sirkin, David Goedicke, Ray LC, Natalie Friedman, Ilan Mandel, Nikolas Marte- laro, and Wendy Ju. Fake it to make it: Exploratory prototyping in hri. InCompanion of the 2021 ACM/IEEE International Conference on Human-Robot Interaction, HRI ’21 Companion, page 19–28, New York, NY , USA,
2021
-
[58]
Association for Computing Machinery. ISBN 9781450382908. doi: 10.1145/3434074.3446909. URL https://doi.org/10.1145/3434074.3446909
-
[59]
Planning-based prediction for pedestrians
Brian D Ziebart, Nathan Ratliff, Garratt Gallagher, Christoph Mertz, Kevin Peterson, J Andrew Bagnell, Martial Hebert, Anind K Dey, and Siddhartha Srini- vasa. Planning-based prediction for pedestrians. In2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, pages 3931–3936. IEEE, 2009
2009
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.