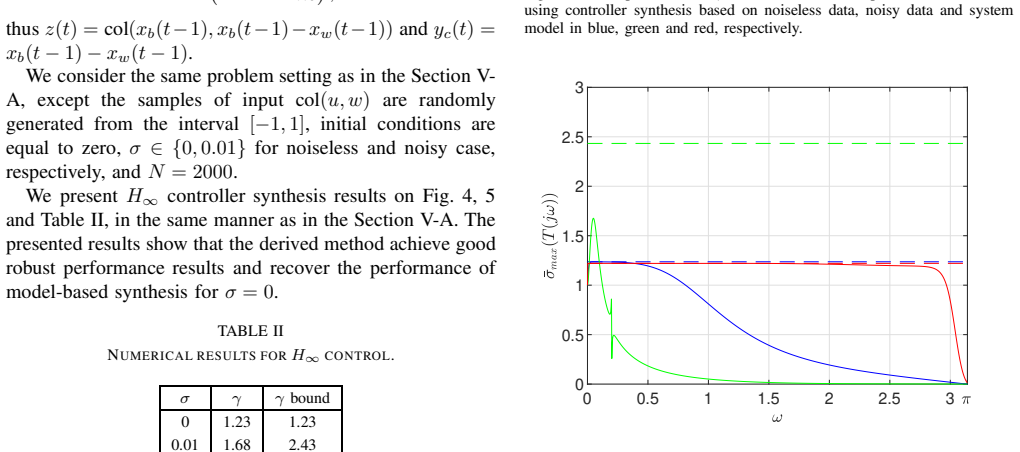
Dynamic Output-Feedback Controller Synthesis for Dissipativity and H₂ Performance from Noisy Input-Output Data
Pith reviewed 2026-06-29 15:51 UTC · model grok-4.3
The pith
Dynamic output-feedback controllers for dissipativity or H2 performance can be synthesized directly from noisy input-output data of unknown discrete-time linear systems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
For discrete-time linear time-invariant systems whose autoregressive dynamics are unknown except for a bounded disturbance outside the performance channel, non-conservative dynamic output-feedback controllers that enforce either dissipativity or a given H2 performance level can be obtained from a single noisy input-output trajectory by solving linear matrix inequalities parametrized by a scalar variable; the same inequalities become ordinary LMIs in the noiseless case.
What carries the argument
Scalar-parameterized linear matrix inequalities that encode the desired dissipativity or H2 condition directly from the recorded noisy input-output trajectory.
If this is right
- Controller design becomes possible without first obtaining an explicit state-space model of the plant.
- The same data trajectory suffices for both dissipativity and H2 specifications.
- The scalar parameter allows the designer to trade off performance against feasibility in the presence of noise.
- The resulting controllers remain valid for any disturbance realization inside the known bound.
- The noiseless case recovers standard LMI-based synthesis as a special instance.
Where Pith is reading between the lines
- The approach could be combined with online data collection to adapt controllers as new trajectories become available.
- Similar data-driven LMI constructions might apply to other quadratic performance criteria beyond dissipativity and H2.
- The scalar parameter might be used to minimize an upper bound on the achieved performance level rather than just checking feasibility.
Load-bearing premise
The system follows an unknown autoregressive model and the only available information about the disturbance is that it is bounded and does not enter the performance channel.
What would settle it
Existence of a stabilizing controller that meets the dissipativity or H2 specification on the true system yet yields no feasible solution to the given LMIs, or conversely a controller obtained from the LMIs that fails to meet the specification on the true system.
Figures
read the original abstract
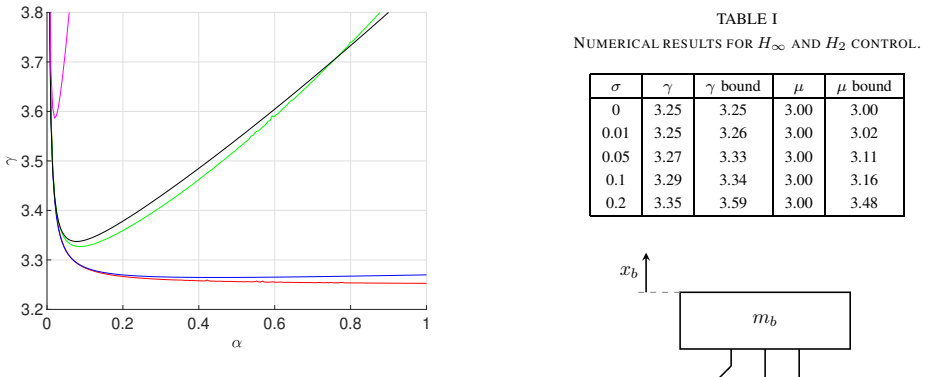
In this paper we propose dynamic output-feedback controller synthesis methods for discrete-time linear time-invariant systems. The synthesis goal is either to achieve dissipativity with respect to a given quadratic supply rate, or to achieve given $H_2$ performance level. It is assumed that the autoregressive model of system dynamics is unknown, expect for the noisy disturbance term which is not part of the performance channel. Instead, we have a recorded trajectory of inputs and outputs which can be corrupted by an unknown but bounded disturbance. Methods are formulated in terms of linear matrix inequalities parametrized by a scalar variable, while in noiseless case they reduce to linear matrix inequalities. Within the considered setting, synthesis procedures are non-conservative.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes dynamic output-feedback controller synthesis procedures for discrete-time LTI systems to achieve dissipativity w.r.t. a quadratic supply rate or a prescribed H2 performance level. The autoregressive system model is unknown; only a single noisy input-output trajectory is available, with the disturbance unknown but bounded and excluded from the performance channel. Synthesis is cast as LMIs parametrized by a scalar variable (reducing to ordinary LMIs in the noiseless case) and asserted to be non-conservative within the stated setting.
Significance. If the non-conservatism claim is rigorously established, the work would provide a notable advance in data-driven robust control: necessary-and-sufficient LMI conditions for the existence of a dynamic output-feedback controller that meets the performance specification for every system consistent with the observed data and the noise bound. This would be stronger than typical sufficient-only data-driven designs and directly useful for experimental controller tuning under bounded disturbances.
major comments (2)
- [Main synthesis theorem / LMI derivation] The central claim that the scalar-parametrized LMIs are non-conservative (i.e., feasible if and only if a suitable controller exists for all systems consistent with the data and noise bound) is load-bearing. The manuscript must explicitly derive, in the section containing the main synthesis theorem, that the scalar range and the chosen relaxation (S-procedure, multiplier, or Schur linearization) recover exact equivalence to the model-based dissipativity/H2 condition without restricting the feasible set. The abstract supplies no indication that this equivalence has been shown for arbitrary bounded noise realizations.
- [Noiseless reduction statement] The reduction to standard LMIs in the noiseless case is stated, but the manuscript should verify (via a dedicated corollary or remark) that the scalar parametrization becomes redundant exactly when the noise bound is zero, without residual conservatism introduced by the parametrization itself.
minor comments (1)
- [Abstract] Typo in the abstract: 'unknown, expect for the noisy disturbance term' should read 'unknown, except for the noisy disturbance term'.
Simulated Author's Rebuttal
We thank the referee for the positive evaluation of the potential contribution and for the constructive major comments. We address each point below and indicate the revisions we will make.
read point-by-point responses
-
Referee: [Main synthesis theorem / LMI derivation] The central claim that the scalar-parametrized LMIs are non-conservative (i.e., feasible if and only if a suitable controller exists for all systems consistent with the data and noise bound) is load-bearing. The manuscript must explicitly derive, in the section containing the main synthesis theorem, that the scalar range and the chosen relaxation (S-procedure, multiplier, or Schur linearization) recover exact equivalence to the model-based dissipativity/H2 condition without restricting the feasible set. The abstract supplies no indication that this equivalence has been shown for arbitrary bounded noise realizations.
Authors: We agree that the non-conservatism claim is central and benefits from more explicit exposition. The proof of the main synthesis theorem establishes necessity and sufficiency by showing that feasibility of the scalar-parametrized LMIs is equivalent to the existence of a dynamic output-feedback controller satisfying the dissipativity (or H2) inequality for every system consistent with the observed trajectory and the given noise bound. This equivalence follows from the exact application of the S-procedure to the quadratic supply-rate condition combined with the bounded-noise constraint; the scalar parametrization is constructed so that its range exactly covers the admissible multipliers without further restriction. The abstract is concise by nature, but the body contains the full argument. To address the request directly, we will insert a dedicated remark (or short subsection) immediately after the theorem statement that walks through the equivalence steps, including why the chosen relaxation introduces no conservatism for arbitrary bounded noise realizations. revision: yes
-
Referee: [Noiseless reduction statement] The reduction to standard LMIs in the noiseless case is stated, but the manuscript should verify (via a dedicated corollary or remark) that the scalar parametrization becomes redundant exactly when the noise bound is zero, without residual conservatism introduced by the parametrization itself.
Authors: We concur that an explicit verification strengthens clarity. When the noise bound is set to zero the data determine the system matrices exactly, and the scalar parameter reduces to a fixed value (specifically 1) that cancels the parametrization terms, recovering the classical model-based LMI conditions for dissipativity or H2 synthesis. We will add a short corollary (or remark) to the main theorem section that formally states this reduction and confirms that the parametrization introduces no residual conservatism in the noiseless limit. revision: yes
Circularity Check
No significant circularity; derivation self-contained
full rationale
The paper formulates dynamic output-feedback synthesis as LMIs parametrized by a scalar for dissipativity or H2 specs from noisy I/O trajectories, reducing to standard LMIs when noise is absent. No quoted step shows a prediction or non-conservatism claim reducing by construction to a fitted parameter, self-citation chain, or renamed input; the scalar parametrization is presented as a relaxation tool whose necessity/sufficiency is asserted within the bounded-noise setting rather than forced by data fitting. The central claim of non-conservatism is therefore independent of the paper's own inputs and does not match any enumerated circularity pattern.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
The Informativity Approach: To Data-Driven Analysis and C ontrol,
H. J. V an Waarde, J. Eising, M. K. Camlibel and H. L. Trente lman, “The Informativity Approach: To Data-Driven Analysis and C ontrol,” in IEEE Control Systems Magazine, vol. 43, no. 6, pp. 32-66, D ec. 2023, doi: 10.1109/MCS.2023.3310305
-
[2]
C. De Persis and P . Tesi, ”Formulas for Data-Driven Contr ol: Sta- bilization, Optimality, and Robustness,” in IEEE Transact ions on Automatic Control, vol. 65, no. 3, pp. 909-924, March 2020, d oi: 10.1109/TAC.2019.2959924
-
[3]
Nonlinear Covariance Control via Differential Dynamic Programming,
J. Berberich, A. Koch, C. Scherer and F. Allg¨ ower, “Robu st data- driven state-feedback design,” Proc. American Control Con ference, 2020, pp.1532-1538, doi 10.23919/ACC45564.2020.9147320
-
[4]
From Nois y Data to Feedback Controllers: Nonconservative Design via a Matrix S-Lemma,
H. J. van Waarde, M. K. Camlibel and M. Mesbahi, “From Nois y Data to Feedback Controllers: Nonconservative Design via a Matrix S-Lemma,” IEEE Transactions on Automatic Control, vol. 67, no. 1, pp. 162-175, Jan. 2022, doi: 10.1109/TAC.2020.3047577
-
[5]
Data-driven contro l via Pe- tersen’s Lemma,
A. Bisoffi, C. De Persis, and P . Tesi, “Data-driven contro l via Pe- tersen’s Lemma,” Automatica, vol. 145, 2022, Art. no. 11053 7
2022
-
[6]
Contro ller Syn- thesis for Input-State Data With Measurement Errors,
A. Bisoffi, L. Li, C. D. Persis and N. Monshizadeh, “Contro ller Syn- thesis for Input-State Data With Measurement Errors,” in IE EE Control Systems Letters, vol. 8, pp. 1571-1576, 2024, doi: 10.1109/ LC- SYS.2024.3402135
-
[7]
Data-Driven State-Feedba ck Con- troller Synthesis for Dissipativity: A Dualization-Based Approach,
P . Kristovi´ c and A. Joki´ c, “Data-Driven State-Feedba ck Con- troller Synthesis for Dissipativity: A Dualization-Based Approach,” Proc. American Control Conference, 2024, pp. 1219-1224, do i: 10.23919/ACC60939.2024.10645012
-
[8]
Synthesis of Dissipati ve Systems Using Input-State Data,
E. T. Nguyen and H. J. V an Waarde, “Synthesis of Dissipati ve Systems Using Input-State Data,” 2024 European Control Con - ference (ECC), Stockholm, Sweden, 2024, pp. 2959-2964, doi : 10.23919/ECC64448.2024.10590889
-
[9]
Comb in- ing Prior Knowledge and Data for Robust Controller Design,
J. Berberich, A. Koch, C. Scherer and F. Allg¨ ower, “Comb in- ing Prior Knowledge and Data for Robust Controller Design,” IEEE Transactions on Automatic Control, 2022, pp. 1-16., do i: 10.1109/TAC.2022.3209342
-
[10]
Transportation Research Part C: Emerging Technologies 108, 130–150
P . Kristovi´ c and A. Joki´ c, ”Output-Feedback H∞ Controller Synthesis from Noisy Data,” 2025 European Control Confer- ence (ECC), Thessaloniki, Greece, 2025, pp. 476-483, doi: 10.23919/ECC65951.2025.11187015
-
[11]
P . Kristovi´ c, A. Joki´ c, and M. Lazar, “Dynamic Output -Feedback Controller Synthesis for Dissipativity and H2 Performance from Noisy Input-State Data,” arXiv preprint arXiv:2507.06788v2, 20 26
-
[12]
On Da ta- Driven Control: Informativity of Noisy Input-Output Data W ith Cross- Covariance Bounds,
T. R. V . Steentjes, M. Lazar and P . M. J. V an den Hof, “On Da ta- Driven Control: Informativity of Noisy Input-Output Data W ith Cross- Covariance Bounds,” IEEE Control Systems Letters, vol. 6, p p. 2192- 2197, 2022, doi: 10.1109/LCSYS.2021.3139526
-
[13]
doi:10.1109/CDC56724.2024.10886720 , booktitle =
P . Kristovi´ c and A. Joki´ c, “Data-Driven Output-Feed back Controller Synthesis for Dissipativity: a Dualization-Based Approac h,” 2024 IEEE 63rd Conference on Decision and Control (CDC), Milan, I taly, 2024, pp. 351-356, doi: 10.1109/CDC56724.2024.10885854
-
[14]
A Behavioral Approach to Data-Driven Control With Noi sy Input–Output Data,
H. J. van Waarde, J. Eising, M. K. Camlibel and H. L. Trent el- man, “A Behavioral Approach to Data-Driven Control With Noi sy Input–Output Data,” in IEEE Transactions on Automatic Cont rol, vol. 69, no. 2, pp. 813-827, Feb. 2024, doi: 10.1109/TAC.2023.32 75014
-
[15]
Notes on Data- driven Output-feedback Control of Linear MIMO Systems,
M. Alsalti, V . G. Lopez and M. A. M¨ uller, “Notes on Data- driven Output-feedback Control of Linear MIMO Systems,” in IEEE Tr ans- actions on Automatic Control (Early Access), March 2025, do i: 10.1109/TAC.2025.3553073
-
[16]
Cont roller synthesis from noisy-input noisy-output data,
L. Li, A. Bisoffi, C. De Persis, and N. Monshizadeh, “Cont roller synthesis from noisy-input noisy-output data,” Automatic a, vol. 183, 2026, Art. no. 112545
2026
-
[17]
P . Kristovi´ c, A. Joki´ c, and M. Lazar, “Output-Feedba ck Con- troller Synthesis for Dissipativity and H2 Performance of Autore- gressive Systems from Noisy Input-Output Data,” arXiv prep rint arXiv:2604.01347, 2026
-
[18]
Robust Control Toolbox User’s Gu ide,
The MathWorks, Inc., “Robust Control Toolbox User’s Gu ide,” Natick, Massachusetts, United States, R2026a, 2026. [Online]. Ava ilable: https://www.mathworks.com/help/robust/
2026
-
[19]
Gainscheduled H2 and H∞ control of discrete-time poly- topic time-varying systems,
J. De Caigny, J. F. Camino, R. C. L. F. Oliveira, P . L. D. Pe res, and J. Swevers, “Gainscheduled H2 and H∞ control of discrete-time poly- topic time-varying systems,” IET Control Theory and Applic ations, vol. 4, no. 3, pp. 362–380, 2010
2010
-
[20]
Quadratic Matrix Inequalities with Applications to D ata-Based Control,
H. J. van Waarde, M. Kanat Camlibel, J. Eising and H. L. Tr entel- man, “Quadratic Matrix Inequalities with Applications to D ata-Based Control,” SIAM Journal on Control and Optimization, vol. 61 , no. 4, pp. 2251-2281, doi: 10.1137/22M1486807
-
[21]
A note on persistency of excitation,
J. C. Willems, P . Rapisarda, I. Markovsky, and B. L. M. de Moor, “A note on persistency of excitation,” Systems & Control Lette rs, vol. 54, no. 4, pp. 325–329, Apr. 2005, doi: 10.1016/j.sysconle.200 4.09.003
-
[22]
Linear Matrix Inequalities in Control,
C. Scherer and S. Weiland, “Linear Matrix Inequalities in Control,” Lecture Notes, 2005
2005
-
[23]
Y ALMIP: A toolbox for modeling and optimiz ation in MA TLAB,
J. Lofberg, “Y ALMIP: A toolbox for modeling and optimiz ation in MA TLAB,” Proc. IEEE Int. Conf. Robot. Autom., 2004, pp. 284– 289
2004
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.