SoftCap: Soft-Budget Control for Diffusion Transformer Acceleration
Pith reviewed 2026-06-29 18:19 UTC · model grok-4.3
The pith
SoftCap pairs a trajectory drift observer with a soft-budget PI controller to raise image quality in diffusion transformer inference at fixed compute.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
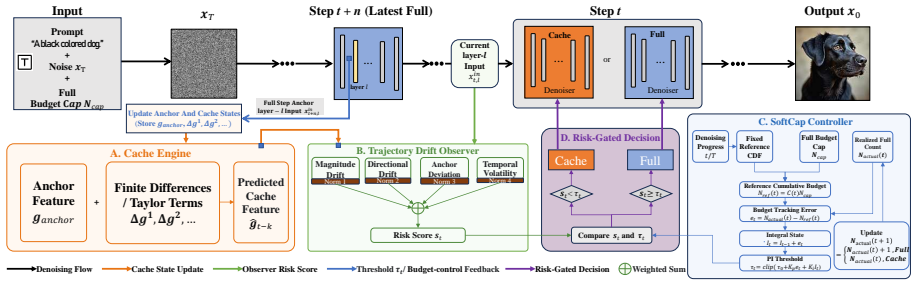
SoftCap couples a Trajectory Drift Observer, which estimates local cache risk from lightweight hidden-state statistics, with a Soft-Budget PI Controller, which adjusts the Full-triggering threshold from realized compute relative to a fixed reference profile. The budget is a soft ceiling: it shapes the threshold but does not require a run to spend a prescribed number of Full evaluations.
What carries the argument
The Soft-Budget PI Controller, which raises or lowers the threshold for a full Transformer evaluation according to how far cumulative compute has drifted from a reference profile while the Trajectory Drift Observer supplies the local risk signal.
If this is right
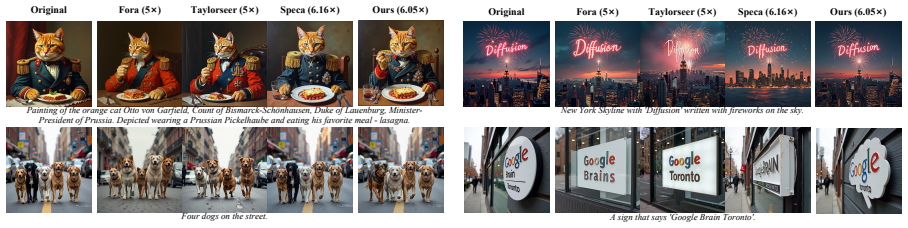
- At a middle-compute operating point on FLUX.1-dev, SoftCap raises ImageReward from 0.967 to 0.981 and lowers LPIPS-Full from 0.518 to 0.498 while holding FLOPs nearly constant versus the prior SpeCa baseline.
- Target-sweep runs confirm that relaxing the budget parameter produces the intended soft-ceiling behavior rather than hard quotas.
- The entire layer remains training-free and sits on top of existing cache, forecast, or verification strategies.
- The controller modulates thresholds continuously rather than relying on fixed schedules or hand-tuned cutoffs.
Where Pith is reading between the lines
- The same observer-plus-controller pattern could be tested on other iterative generative architectures that maintain intermediate feature caches, such as video diffusion or autoregressive image models.
- If the hidden-state statistics remain predictive at larger model scales, production pipelines could drop manual threshold tuning in favor of a single reference-profile setting.
- Replacing the PI controller with a small learned policy that receives the same drift signals might further tighten the quality-compute frontier without adding training cost to the base model.
Load-bearing premise
Lightweight hidden-state statistics give a sufficiently accurate picture of local cache risk for the controller to set thresholds that avoid systematic quality loss.
What would settle it
An experiment in which the drift observer's risk score shows near-zero or negative correlation with measured quality drop when full steps are skipped would falsify the premise that the statistics are informative enough to guide the controller.
Figures

read the original abstract
Diffusion Transformers (DiTs) achieve strong visual quality, but their iterative denoising process requires many costly Transformer evaluations. Training-free acceleration methods reduce this cost by caching, forecasting, or verifying intermediate features, yet the runtime decision of when to execute a Full step is often driven by fixed schedules or hand-tuned thresholds. We propose \textbf{SoftCap}, a training-free control layer for cache-based DiT inference. SoftCap couples a Trajectory Drift Observer, which estimates local cache risk from lightweight hidden-state statistics, with a Soft-Budget PI Controller, which adjusts the Full-triggering threshold from realized compute relative to a fixed reference profile. The budget is a soft ceiling: it shapes the threshold but does not require a run to spend a prescribed number of Full evaluations. On FLUX.1-dev, SoftCap improves over SpeCa at a comparable middle-compute operating point, raising ImageReward from 0.967 to 0.981 and reducing LPIPS-Full from 0.518 to 0.498 at nearly identical FLOPs, while target-sweep diagnostics show the intended soft-ceiling behavior as the budget is relaxed.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes SoftCap, a training-free control layer for cache-based Diffusion Transformer (DiT) inference. It couples a Trajectory Drift Observer, which estimates local cache risk from lightweight hidden-state statistics, with a Soft-Budget PI Controller that dynamically adjusts the Full-step triggering threshold based on realized compute relative to a reference profile. The budget acts as a soft ceiling. On FLUX.1-dev, SoftCap reports gains over SpeCa at a comparable middle-compute point (ImageReward 0.981 vs. 0.967; LPIPS-Full 0.498 vs. 0.518) at nearly identical FLOPs, with target-sweep diagnostics confirming the intended soft-ceiling behavior.
Significance. If the empirical gains prove robust under full experimental protocols, SoftCap would supply a practical, training-free mechanism for adaptive compute control in DiT sampling that avoids both fixed schedules and hard per-run budgets. The target-sweep diagnostics are a positive feature, as they directly test the soft-ceiling property rather than reporting only a single operating point.
major comments (1)
- [Abstract] The central claim depends on the Trajectory Drift Observer supplying sufficiently accurate local cache-risk estimates from lightweight hidden-state statistics so that the PI controller can set thresholds without systematic quality loss. The abstract states only that the observer “estimates local cache risk from lightweight hidden-state statistics” and reports aggregate metric improvements; it supplies no correlation analysis, ablation, or ground-truth comparison (e.g., LPIPS or ImageReward delta when a cached step is forced versus recomputed). This validation is load-bearing for the method’s reliability and is absent from the provided description.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and positive assessment of SoftCap's practical value and the target-sweep diagnostics. We address the single major comment below.
read point-by-point responses
-
Referee: [Abstract] The central claim depends on the Trajectory Drift Observer supplying sufficiently accurate local cache-risk estimates from lightweight hidden-state statistics so that the PI controller can set thresholds without systematic quality loss. The abstract states only that the observer “estimates local cache risk from lightweight hidden-state statistics” and reports aggregate metric improvements; it supplies no correlation analysis, ablation, or ground-truth comparison (e.g., LPIPS or ImageReward delta when a cached step is forced versus recomputed). This validation is load-bearing for the method’s reliability and is absent from the provided description.
Authors: We agree that the abstract, as currently written, does not explicitly reference the validation of the Trajectory Drift Observer and therefore leaves the central claim less self-contained than it could be. The full manuscript contains the requested elements: Section 3.2 defines the observer and its lightweight statistics; Section 4.2 reports correlation coefficients between observer risk scores and per-step LPIPS deltas (cached vs. recomputed); and Section 4.3 includes an ablation that forces cache decisions at varying risk thresholds and measures the resulting ImageReward and LPIPS-Full degradation. We will revise the abstract to add one sentence summarizing this validation (e.g., “Observer risk estimates correlate with per-step quality deltas, enabling the controller to avoid systematic degradation”). revision: yes
Circularity Check
No circularity: empirical control method with direct performance measurements
full rationale
The paper describes a training-free control layer (Trajectory Drift Observer + Soft-Budget PI Controller) whose outputs are runtime thresholds and cache decisions. Reported gains (ImageReward 0.967→0.981, LPIPS-Full 0.518→0.498 at matched FLOPs) are presented as direct empirical results on FLUX.1-dev versus SpeCa, not as quantities derived from or fitted to the method's own statistics. No equations, self-citations, or uniqueness claims are supplied that would reduce any central result to its inputs by construction. The derivation chain is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Hanshuai Cui, Zhiqing Tang, Qianli Ma, Zhi Yao, and Weijia Jia
Forecast the principal, stabi- lize the residual: Subspace-aware feature caching for efficient diffusion transformers.arXiv preprint arXiv:2601.07396. Hanshuai Cui, Zhiqing Tang, Qianli Ma, Zhi Yao, and Weijia Jia
-
[2]
Predict to skip: Linear multistep feature forecasting for efficient diffusion transform- ers.arXiv preprint arXiv:2602.18093. Feng Liu, Shiwei Zhang, Xiaofeng Wang, Yujie Wei, Haonan Qiu, Yuzhong Zhao, Yingya Zhang, Qixi- ang Ye, and Fang Wan. 2025a. Timestep embedding tells: It’s time to cache for video diffusion model. InProceedings of the Computer Visi...
-
[3]
InProceedings of the IEEE/CVF international conference on computer vision, pages 4195–4205
Scalable dif- fusion models with transformers. InProceedings of the IEEE/CVF international conference on computer vision, pages 4195–4205. Junxiang Qiu, Lin Liu, Shuo Wang, Jinda Lu, Kezhou Chen, and Yanbin Hao. 2025a. Accelerating diffu- sion transformer via gradient-optimized cache. In Proceedings of the IEEE/CVF International Confer- ence on Computer V...
2025
-
[4]
arXiv preprint arXiv:2407.01425 (2024)
Fora: Fast- forward caching in diffusion transformer acceleration. arXiv preprint arXiv:2407.01425. Byunggwan Son, Jeimin Jeon, Jeongwoo Choi, and Bumsub Ham
-
[5]
Relational feature caching for accelerating diffusion transformers.arXiv preprint arXiv:2602.19506. Shikang Zheng, Liang Feng, Xinyu Wang, Qinming Zhou, Peiliang Cai, Chang Zou, Jiacheng Liu, Yuqi Lin, Junjie Chen, Yue Ma, and 1 others
-
[6]
Chang Zou, Xuyang Liu, Ting Liu, Siteng Huang, and Linfeng Zhang
Tap: A token-adaptive predictor framework for training-free diffusion acceleration.arXiv preprint arXiv:2603.03792. Chang Zou, Xuyang Liu, Ting Liu, Siteng Huang, and Linfeng Zhang
-
[7]
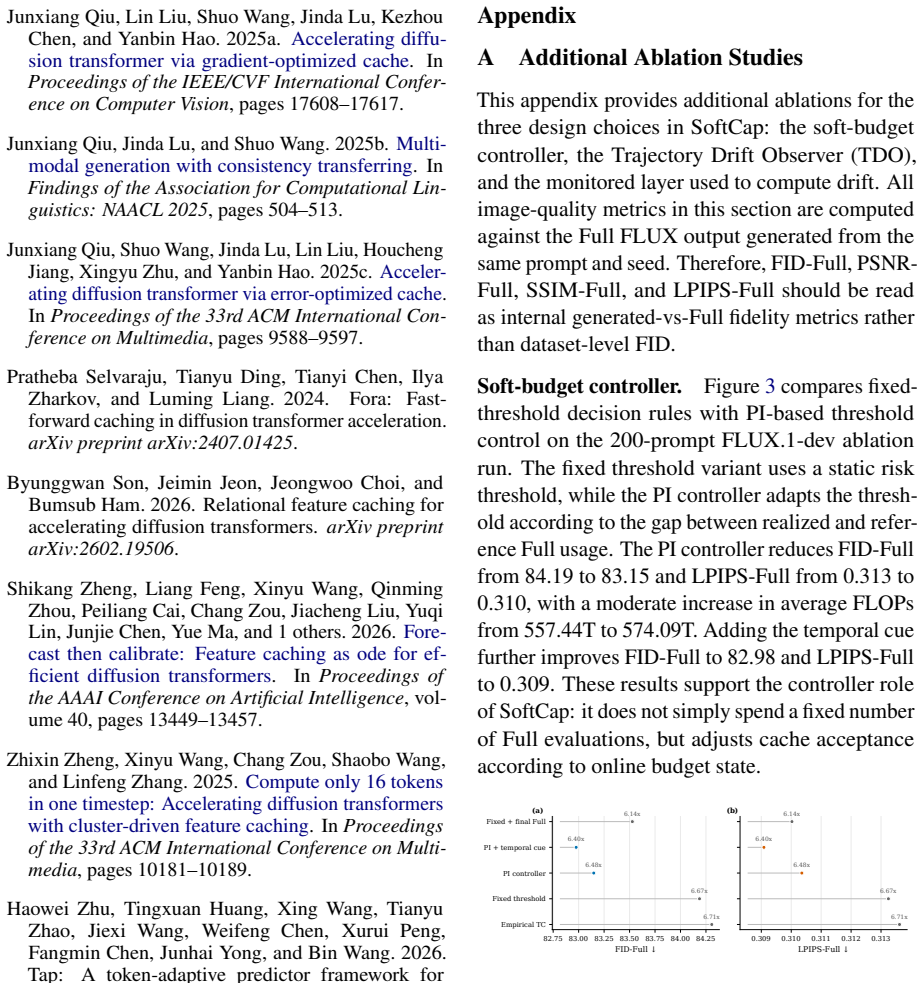
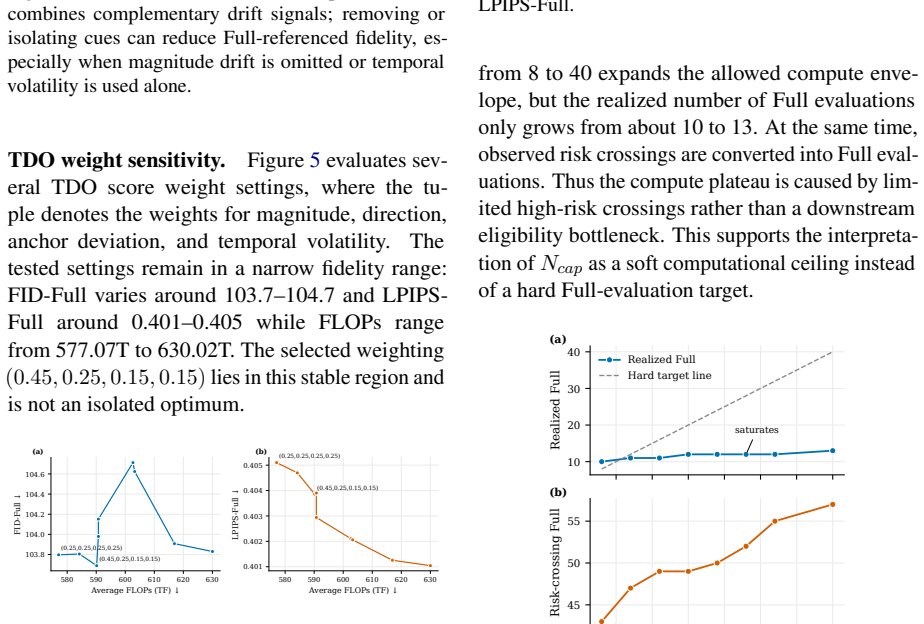
Accelerating diffusion trans- formers with token-wise feature caching.arXiv preprint arXiv:2410.05317. Appendix A Additional Ablation Studies This appendix provides additional ablations for the three design choices in SoftCap: the soft-budget controller, the Trajectory Drift Observer (TDO), and the monitored layer used to compute drift. All image-quality ...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.