Designing Active Tether-Net Systems for Space Debris Capture with Graph-Learning-Aided Mixed-Combinatorial Optimization
Pith reviewed 2026-06-29 14:12 UTC · model grok-4.3
The pith
A graph neural network recommends net and thruster combinations to turn mixed combinatorial design of tether-net capture systems into a standard nonlinear program.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The combinatorial space of net connectivity patterns and component choices is represented as a graph whose nodes are candidate designs; a graph neural network trained to output scores for those nodes, conditioned on the continuous design variables, supplies a short list of candidates that are then optimized as ordinary nonlinear programs, yielding solutions of similar quality to the original mixed combinatorial nonlinear program but with substantially faster convergence.
What carries the argument
Graph neural network that scores candidate design nodes (net connectivity and component choices) given continuous inputs, reducing the mixed combinatorial nonlinear program to repeated solution of a standard nonlinear program.
If this is right
- The same graph-learning reduction applies to any engineering design task whose discrete decisions form a graph whose nodes can be scored from continuous parameters.
- Once trained, the graph neural network can be reused across multiple continuous optimization runs without retraining, amortizing the cost of learning the combinatorial structure.
- Because the approach is solver-agnostic, any improved nonlinear program solver can be swapped in to further accelerate the reduced problems.
- The method separates the combinatorial recommendation step from the continuous optimization step, allowing independent scaling of each.
Where Pith is reading between the lines
- If the graph neural network generalizes across different target sizes or orbital conditions, the same trained model could support rapid redesign for new debris objects without repeating the full mixed optimization.
- Extending the graph to include failure modes or sensor placement choices would let the same recommender jointly optimize capture reliability alongside capture performance.
- The reduction may also apply to other capture mechanisms such as harpoon or robotic arm systems whose topology choices are likewise graph-structured.
Load-bearing premise
The graph structure on the discrete design choices is rich enough that a trained graph neural network will surface combinations whose optimized continuous solutions are close to the global optimum of the full mixed problem.
What would settle it
Run both the GNN-recommender pipeline and a direct mixed-integer or integer-coded solver on the same tether-net design instance for a fixed computational budget and compare the best objective value achieved; if the direct solver consistently finds a materially better design, the reduction claim is falsified.
Figures
read the original abstract
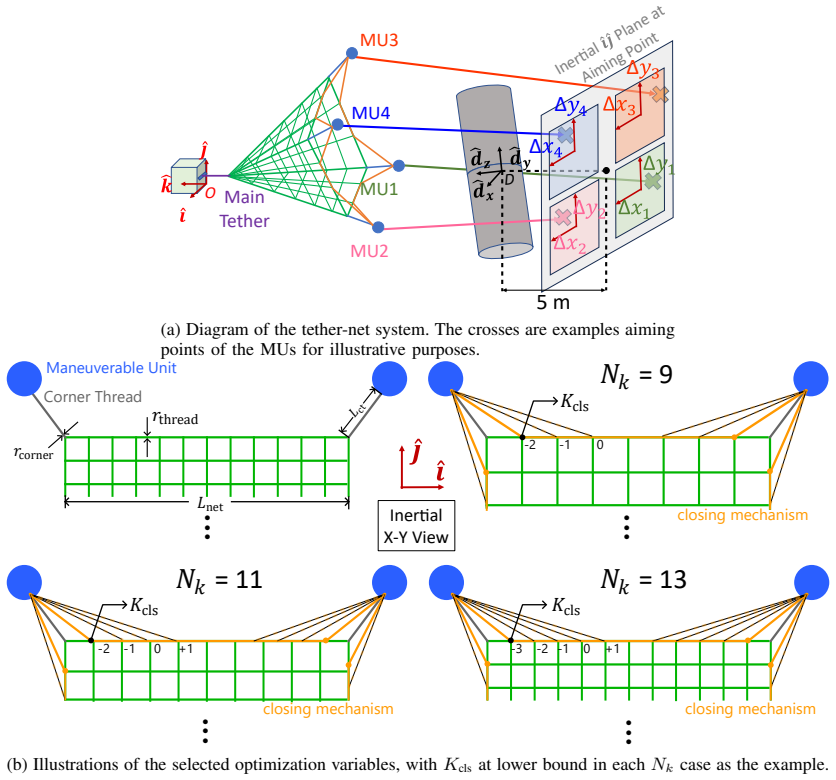
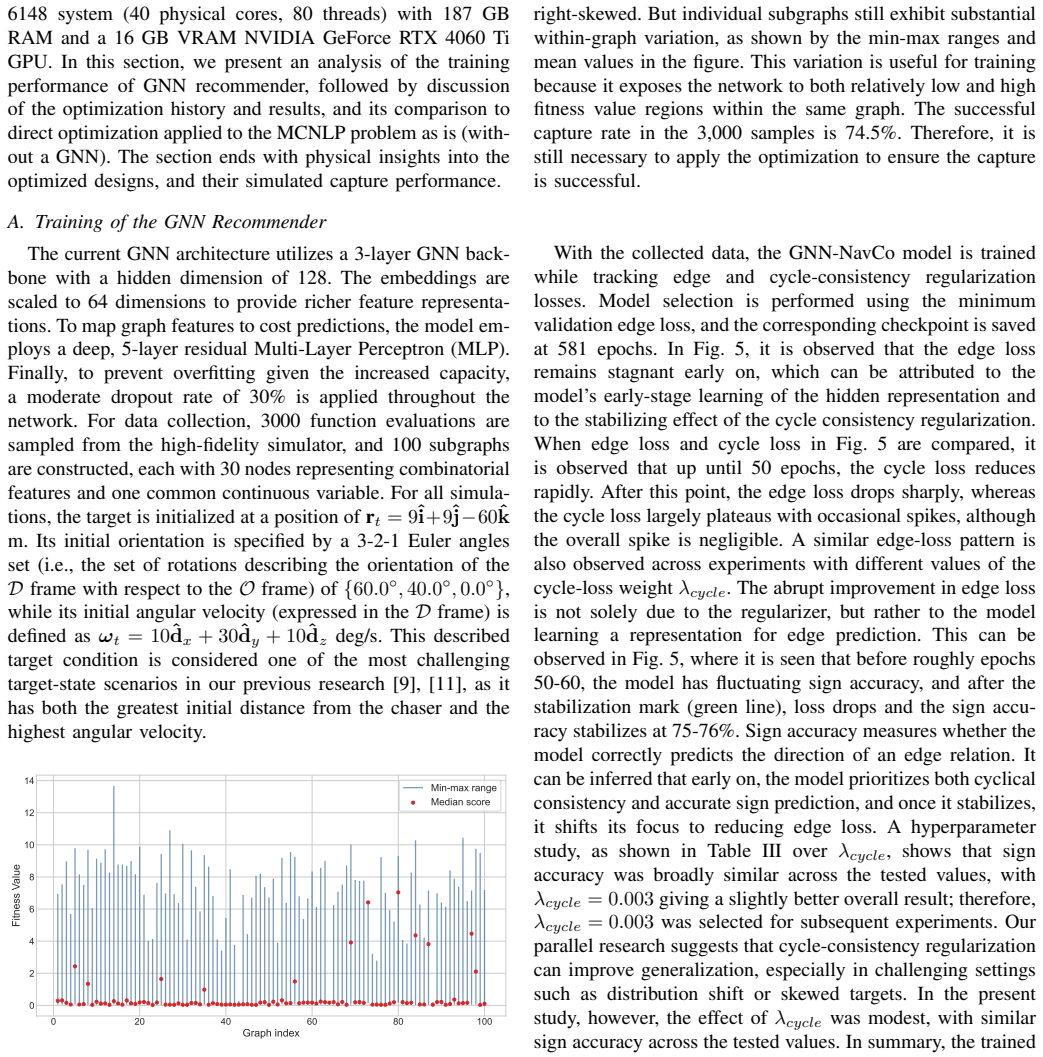
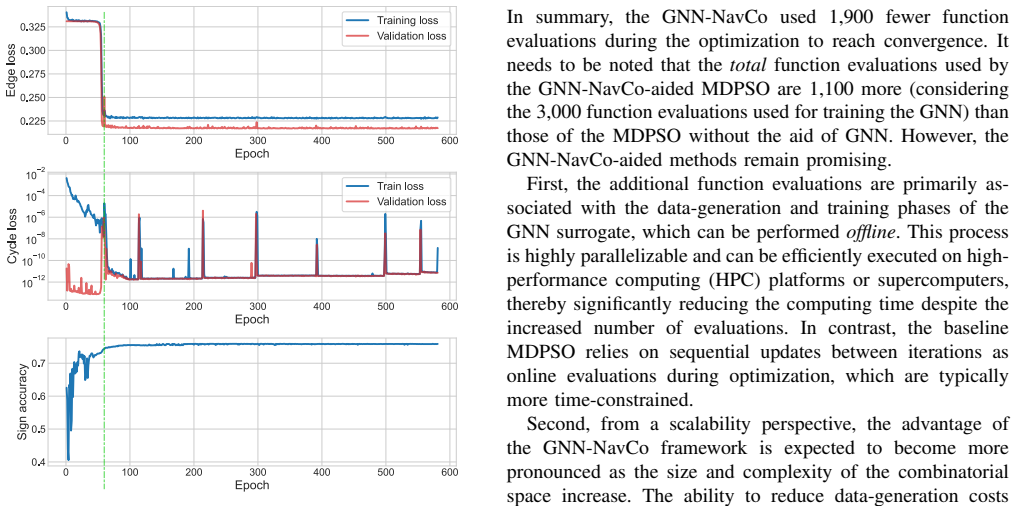
Active tether-net systems are a promising solution for capturing large non-cooperative targets, such as space debris, by deploying a flexible net manipulated by maneuverable units (MUs). However, concurrent systematic explorations of design and control choices of the tether-net system to understand its full potential remain limited, partly due to the complex, constrained, nonlinear optimization problem that it presents -- one that involves a mixture of continuous, integer and categorical variables, with the latter two arising from net connectivity and component choices, respectively. Classical binary encoding methods are often ineffective for solving highly nonlinear and multimodal Mixed Combinatorial Nonlinear Programmings (MCNLPs) in engineering design, while integer coding approaches can introduce spurious relations among combinations. Given the graph-structured characteristics of the combinatorial space, this paper adopts and extends a new graph-learning-aided optimization approach to solve this MCNLP problem. Here, a Graph Neural Network (GNN) is trained to score (as output) and thereof recommend candidate combinations represented as nodes in a graph, with the continuous variable vector portion of a candidate design given as input. As a result, the MCNLP optimization reduces to an NLP, which can be solved using standard solvers. While this reduction approach is agnostic to the choice of the NLP solver, here a state-of-the-art Particle Swarm Optimization (PSO) algorithm with gradient-based fine-tuning is used as the solver. Demonstrated on the problem of concurrently designing the morphology of the net, choice of mass and thrusters in the MUs and aiming points used by the controller of the tether-net system, the GNN-based recommender is shown to provide significantly faster convergence to similar optimal solutions, compared to direct solution of the MCNLP problem.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
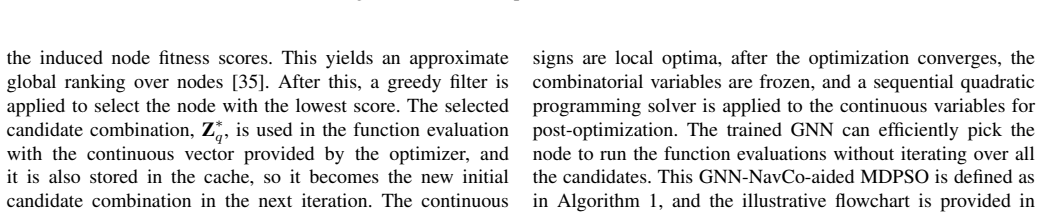
Summary. The manuscript presents a graph neural network (GNN)-aided method to solve mixed combinatorial nonlinear programming (MCNLP) problems arising in the concurrent design of morphology, component choices, and control parameters for active tether-net systems used in space debris capture. By representing the combinatorial space as a graph and training a GNN to score nodes given continuous inputs, the approach reduces the MCNLP to a standard NLP solved using particle swarm optimization (PSO) with gradient-based fine-tuning. The paper demonstrates that this method achieves significantly faster convergence to solutions of comparable quality compared to directly solving the full MCNLP.
Significance. If the empirical claims hold under rigorous validation, the reduction technique could offer an efficient route for graph-structured mixed-variable design optimization in aerospace applications. The solver-agnostic framing is a constructive feature. No machine-checked proofs or parameter-free derivations are present, so significance rests entirely on the quality and reproducibility of the numerical comparisons.
major comments (3)
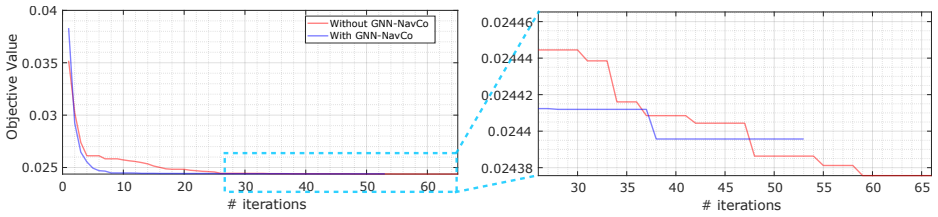
- [§5] §5 (results): the central claim of 'significantly faster convergence to similar optimal solutions' is stated without reported wall-clock times, objective-value tables, convergence curves, baseline solver settings for the direct MCNLP, or any statistical test confirming that the attained optima are statistically indistinguishable.
- [§4.2] §4.2 (GNN training): no small-scale exhaustive enumeration or hold-out coverage test is described to verify that the learned node scores, conditioned only on the continuous vector, recover the global-optimum discrete combinations; this directly bears on whether the reduced NLP can miss superior designs.
- [§3.1] §3.1 (graph construction): the mapping from net-connectivity and MU-component choices to graph nodes is defined without a formal argument that every feasible discrete combination appears as a node, leaving open the possibility that the GNN recommender operates on an incomplete search space.
minor comments (2)
- [Figure 2] Figure 2 caption does not specify the exact continuous-variable inputs fed to the GNN at inference time.
- [§5] The PSO hyper-parameters used for both the reduced NLP and the direct MCNLP baseline should be listed in a single table for direct comparison.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below and will revise the manuscript to incorporate the suggested improvements for clarity and rigor.
read point-by-point responses
-
Referee: [§5] §5 (results): the central claim of 'significantly faster convergence to similar optimal solutions' is stated without reported wall-clock times, objective-value tables, convergence curves, baseline solver settings for the direct MCNLP, or any statistical test confirming that the attained optima are statistically indistinguishable.
Authors: We agree that the results section would benefit from more comprehensive reporting to support the central claim. In the revised manuscript, we will add wall-clock time measurements, objective-value tables comparing both approaches, convergence curves, explicit details on baseline solver settings for the direct MCNLP, and statistical tests (such as paired t-tests or Wilcoxon signed-rank tests with p-values) to assess whether the attained optima are statistically indistinguishable. These will be included in an expanded Section 5. revision: yes
-
Referee: [§4.2] §4.2 (GNN training): no small-scale exhaustive enumeration or hold-out coverage test is described to verify that the learned node scores, conditioned only on the continuous vector, recover the global-optimum discrete combinations; this directly bears on whether the reduced NLP can miss superior designs.
Authors: This is a valid concern regarding the validation of the GNN recommender. While the manuscript focuses on end-to-end performance, we will add a new subsection to §4.2 that includes a small-scale exhaustive enumeration on a reduced instance of the combinatorial space, along with hold-out coverage tests. This will quantify how well the learned scores recover globally optimal discrete combinations and address the risk of missing superior designs. revision: yes
-
Referee: [§3.1] §3.1 (graph construction): the mapping from net-connectivity and MU-component choices to graph nodes is defined without a formal argument that every feasible discrete combination appears as a node, leaving open the possibility that the GNN recommender operates on an incomplete search space.
Authors: We will strengthen §3.1 by adding a formal argument and proof sketch demonstrating that the graph construction procedure generates a node for every feasible discrete combination. This will explicitly show that the mapping from net-connectivity patterns and MU-component choices exhaustively covers the feasible space under the problem constraints, ensuring the GNN operates on a complete search space. revision: yes
Circularity Check
No significant circularity in derivation or performance claims
full rationale
The paper presents an empirical comparison between a GNN-based reduction of the MCNLP (training a GNN to score graph nodes for discrete choices given continuous inputs, then solving the resulting NLP with PSO) and direct solution of the full MCNLP on the tether-net design task. No equation or claim reduces the reported convergence speed or solution quality to a quantity defined by the GNN outputs themselves; the benchmark remains an external direct solver. The adoption of the graph-learning approach is described as an extension of prior methodology but does not serve as a load-bearing self-citation for the performance result, nor does any step match self-definitional, fitted-input, or ansatz-smuggling patterns. The derivation chain is therefore self-contained against the stated external benchmark.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The combinatorial space of net connectivity and component choices can be represented as a graph for GNN scoring.
Reference graph
Works this paper leans on
-
[1]
Analysis and Consequences of the Irid- ium 33-Cosmos 2251 Collision,
P. Anz-Meador and J.-C. Liou, “Analysis and Consequences of the Irid- ium 33-Cosmos 2251 Collision,” in38th COSPAR Scientific Assembly, Bremen, Germany, July 2010
2010
-
[2]
A review and comparison of active space debris capturing and removal methods,
M. Shan, J. Guo, and E. Gill, “A review and comparison of active space debris capturing and removal methods,”Progress in Aerospace Sciences, vol. 80, pp. 18–32, 2015
2015
-
[3]
Robustness and safety of net-based debris capture under deployment and environmental uncertainties,
A. Boonrath and E. M. Botta, “Robustness and safety of net-based debris capture under deployment and environmental uncertainties,”Journal of Spacecraft and Rockets, pp. 1–17, 2025
2025
-
[4]
Dynamic computation of a tether-net system capturing a space target via discrete elastic rods and an energy-conserving integrator,
Y . Hou, C. Liu, H. Hu, W. Yang, and J. Shi, “Dynamic computation of a tether-net system capturing a space target via discrete elastic rods and an energy-conserving integrator,”Acta Astronautica, vol. 186, pp. 118–134, 2021
2021
-
[5]
Contact dynamic analysis of tether-net system for space debris capture using incremental potential formulation,
W. Huang, H. Zou, H. Liu, W. Yang, J. Gao, and Z. Liu, “Contact dynamic analysis of tether-net system for space debris capture using incremental potential formulation,”Advances in Space Research, 2023
2023
-
[6]
Approach modeling and control of an autonomous maneuverable space net,
Z. Meng, P. Huang, and J. Guo, “Approach modeling and control of an autonomous maneuverable space net,”IEEE Transactions on Aerospace and Electronic Systems, vol. 53, no. 6, pp. 2651–2661, 2017
2017
-
[7]
Impulsive super-twisting sliding mode control for space debris capturing via tethered space net robot,
Y . Zhao, F. Zhang, P. Huang, and X. Liu, “Impulsive super-twisting sliding mode control for space debris capturing via tethered space net robot,”IEEE transactions on industrial electronics (1982), vol. 67, no. 8, pp. 6874–6882, 2020
1982
-
[8]
Learning constrained corner node trajectories of a tether net system for space debris capture,
F. Liu, A. Boonrath, P. KrisshnaKumar, E. M. Botta, and S. Chowdhury, “Learning constrained corner node trajectories of a tether net system for space debris capture,” inAIAA AVIATION 2023 Forum, 2023, p. 3920
2023
-
[9]
Learning-aided control of robotic tether-net with maneuverable nodes to capture large space debris,
A. Boonrath, F. Liu, E. M. Botta, and S. Chowdhury, “Learning-aided control of robotic tether-net with maneuverable nodes to capture large space debris,”IEEE 2024 International Conference on Robotics and Automation, 2024
2024
-
[10]
Multi-debris capture by tethered space net robot via redeployment and assembly,
W. Zhu, Z. Pang, Z. Du, G. Gao, and Z. H. Zhu, “Multi-debris capture by tethered space net robot via redeployment and assembly,”Journal of Guidance, Control, and Dynamics, pp. 1–18, 2024
2024
-
[11]
Surrogate-aided learning of active tether-net maneuver to capture rotating space debris,
F. Liu, A. Boonrath, E. M. Botta, and S. Chowdhury, “Surrogate-aided learning of active tether-net maneuver to capture rotating space debris,” IEEE Transactions on Aerospace and Electronic Systems, vol. 62, pp. 630 – 645, 2025
2025
-
[12]
Mixed integer programming modeling for the satellite three-dimensional com- ponent assignment and layout optimization problem,
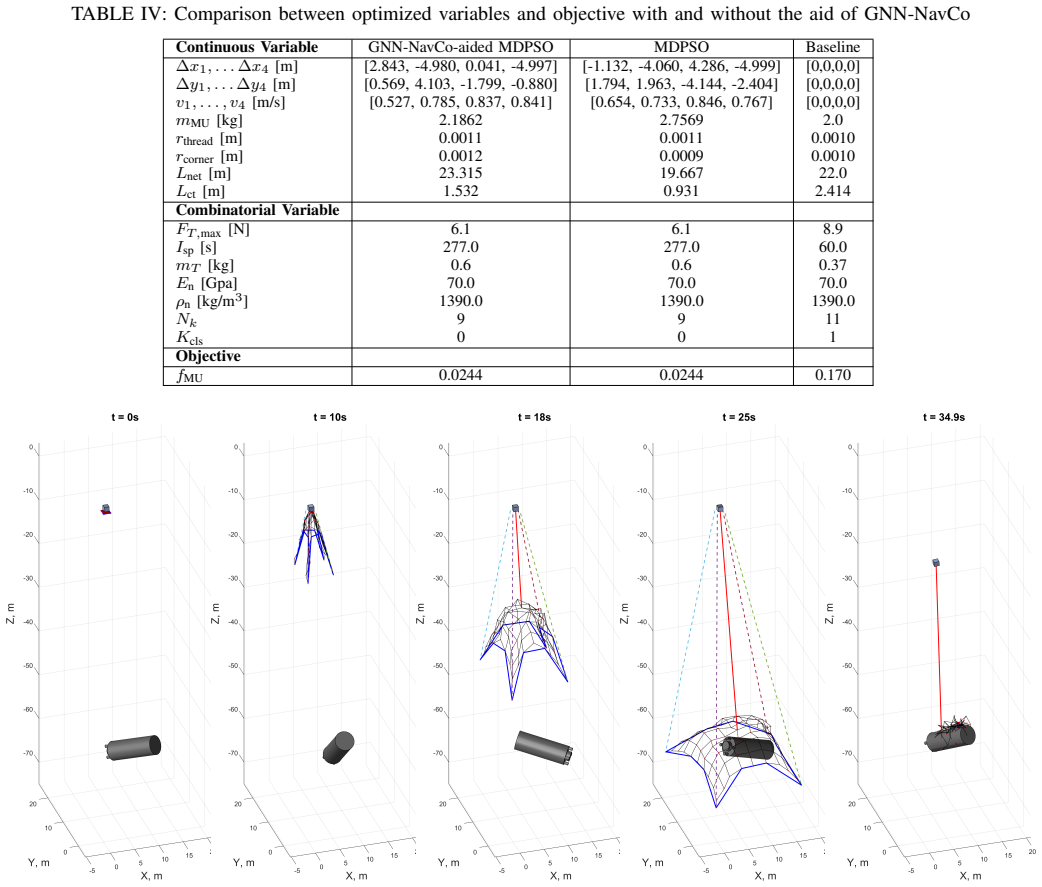
Y . Xia, X. Chen, Z. Liu, W. Zhou, W. Yao, and Z. Zhang, “Mixed integer programming modeling for the satellite three-dimensional com- ponent assignment and layout optimization problem,”Chinese Journal of Aeronautics, p. 103415, 2025. 12 TABLE IV: Comparison between optimized variables and objective with and without the aid of GNN-NavCo Continuous Variable...
2025
-
[13]
On the time transformation of mixed integer optimal control problems using a consistent fixed integer control function,
M. Ringkamp, S. Ober-Bl ¨obaum, and S. Leyendecker, “On the time transformation of mixed integer optimal control problems using a consistent fixed integer control function,”Mathematical programming, vol. 161, no. 1-2, pp. 551–581, 2017
2017
-
[14]
A compre- hensive survey on graph neural networks,
Z. Wu, S. Pan, F. Chen, G. Long, C. Zhang, and P. S. Yu, “A compre- hensive survey on graph neural networks,”CoRR, vol. abs/1901.00596, 2019
-
[15]
Attention is all you need,
A. Vaswani, N. Shazeer, N. Parmar, J. Uszkoreit, L. Jones, A. N. Gomez, Ł. Kaiser, and I. Polosukhin, “Attention is all you need,”Advances in neural information processing systems, vol. 30, 2017
2017
-
[16]
Solve routing problems with a residual edge-graph attention neural network,
K. Lei, P. Guo, Y . Wang, X. Wu, and W. Zhao, “Solve routing problems with a residual edge-graph attention neural network,”Neurocomputing, vol. 508, pp. 79–98, 2022
2022
-
[17]
Learning scalable policies over graphs for multi-robot task allocation using capsule attention net- works,
S. Paul, P. Ghassemi, and S. Chowdhury, “Learning scalable policies over graphs for multi-robot task allocation using capsule attention net- works,” in2022 International Conference on Robotics and Automation (ICRA), 2022, pp. 8815–8822
2022
-
[18]
Learning to allocate time-bound and dynamic tasks to multiple robots using covariant attention neural net- works,
S. Paul and S. Chowdhury, “Learning to allocate time-bound and dynamic tasks to multiple robots using covariant attention neural net- works,”Journal of Computing and Information Science in Engineering, vol. 24, no. 9, p. 091005, 08 2024
2024
-
[19]
Augmenting optimization-based molecular design with graph neural networks,
S. Zhang, J. S. Campos, C. Feldmann, F. Sandfort, M. Mathea, and R. Misener, “Augmenting optimization-based molecular design with graph neural networks,”Computers & chemical engineering, vol. 186, pp. 108 684–, 2024
2024
-
[20]
Efficient de- sign optimization over mixed-combinatorial spaces enabled by graph- learning,
F. Liu, S. Chowdhury, A. Boonrath, and E. M. Botta, “Efficient de- sign optimization over mixed-combinatorial spaces enabled by graph- learning,” inASME 2025 International Design Engineering Technical Conferences and Computers and Information in Engineering Confer- ence, 08 2025, p. V03AT03A021
2025
-
[21]
Graph convolutional networks: a comprehensive review,
S. Zhang, H. Tong, J. Xu, and R. Maciejewski, “Graph convolutional networks: a comprehensive review,”Computational Social Networks, vol. 6, no. 1, p. 11, Nov 2019
2019
-
[22]
Graph attention networks,
P. Veli ˇckovi´c, G. Cucurull, A. Casanova, A. Romero, P. Li `o, and 13 Y . Bengio, “Graph attention networks,” inInternational Conference on Learning Representations, vol. 6, no. 2. International Conference on Learning Representations, 2018
2018
-
[23]
Graph capsule convolutional neural net- works,
S. Verma and Z.-L. Zhang, “Graph capsule convolutional neural net- works,” inarXiv, 2018
2018
-
[24]
On the simulation of tether-nets for space debris capture with V ortex Dynamics,
E. M. Botta, I. Sharf, A. K. Misra, and M. Teichmann, “On the simulation of tether-nets for space debris capture with V ortex Dynamics,” Acta Astronautica, vol. 123, pp. 91–102, 2016
2016
-
[25]
Simulation of tether-nets for capture of space debris and small asteroids,
E. M. Botta, I. Sharf, and A. K. Misra, “Simulation of tether-nets for capture of space debris and small asteroids,”Acta Astronautica, vol. 155, pp. 448–461, 2019
2019
-
[26]
A mission concept for removing multiple debris using formation-flying slingshot spacecraft,
A. Boonrath, F. Rossi, I. A. Nesnas, and E. M. Botta, “A mission concept for removing multiple debris using formation-flying slingshot spacecraft,”Acta Astronautica, vol. 237, pp. 443–459, 2025
2025
-
[27]
Active debris removal simulations using spider-web space-nets for kitsat-1 satellite,
M. Jang, H.-C. Shin, C.-H. Sim, J.-S. Park, and H. Cho, “Active debris removal simulations using spider-web space-nets for kitsat-1 satellite,” International Journal of Aeronautical and Space Sciences, vol. 24, no. 5, pp. 1311–1322, 2023
2023
-
[28]
Concurrent design optimization of tether-net system and actions for reliable space-debris capture,
C. Zeng, G. R. Hecht, S. Chowdhury, and E. M. Botta, “Concurrent design optimization of tether-net system and actions for reliable space-debris capture,”Journal of Spacecraft and Rockets, vol. 0, no. 0, pp. 1–11, 0. [Online]. Available: https://doi.org/10.2514/1.A35812
-
[29]
State- of-the-art small spacecraft technology 2024,
S. V . Weston, C. D. Burkhard, J. M. Stupl, R. L. Ticknor, B. D. Yost, R. A. Austin, P. Galchenko, L. K. Newman, and L. S. Soto, “State- of-the-art small spacecraft technology 2024,” National Aeronautics and Space Administration (NASA), Ames Research Center, Moffett Field, California, Tech. Rep. NASA/TP—20250000142, February 2025. [Online]. Available: htt...
2024
-
[30]
Ecaps 5n hpgp thruster brochure,
ECAPS, “Ecaps 5n hpgp thruster brochure,” 2023, ac- cessed: 2025-03-20. [Online]. Available: https://satsearch.co/products/ ecaps-5n-hpgp-thruster
2023
-
[31]
5n low throughput (lt) thruster,
R. S. Systems, “5n low throughput (lt) thruster,” 2023, accessed: 2025-03-20. [Online]. Available: https://www.rubicon.space/product/19/ 5n-lt-thruster
2023
-
[32]
Deployment and Capture Dynamics of Tether-Nets for Active Space Debris Removal,
E. M. Botta, “Deployment and Capture Dynamics of Tether-Nets for Active Space Debris Removal,” Ph.D. dissertation, McGill University, Montreal, Qu ´ebec, 2017
2017
-
[33]
[Online]
DuPont,Kevlar® Aramid Fiber Technical Guide, 2023, accessed: 2025- 03-20. [Online]. Available: https://www.dupont.com/products/kevlar
2023
-
[34]
A gentle introduction to graph neural networks,
B. Sanchez-Lengeling, E. Reif, A. Pearce, and A. B. Wiltschko, “A gentle introduction to graph neural networks,”Distill, 2021, https://distill.pub/2021/gnn-intro
2021
-
[35]
Graph laplacians and least squares on graphs,
A. N. Hirani, K. Kalyanaraman, and S. Watts, “Graph laplacians and least squares on graphs,” in2015 IEEE International Parallel and Distributed Processing Symposium Workshop, 2015, pp. 812–821
2015
-
[36]
A mixed- discrete particle swarm optimization algorithm with explicit diversity- preservation,
S. Chowdhury, W. Tong, A. Messac, and J. Zhang, “A mixed- discrete particle swarm optimization algorithm with explicit diversity- preservation,”Structural and Multidisciplinary Optimization, vol. 47, pp. 367–388, 2013
2013
-
[37]
A multi-objective mixed- discrete particle swarm optimization with multi-domain diversity preser- vation,
W. Tong, S. Chowdhury, and A. Messac, “A multi-objective mixed- discrete particle swarm optimization with multi-domain diversity preser- vation,”Structural and Multidisciplinary Optimization, vol. 53, pp. 471– 488, 2016
2016
-
[38]
Data and video repository for the paper – designing active tether-net system for space debris capture with graph learning aided mixed-combinatorial optimization,
F. Liu, A. Boonrath, G. Madhu, E. M. Botta, and S. Chowdhury, “Data and video repository for the paper – designing active tether-net system for space debris capture with graph learning aided mixed-combinatorial optimization,” https://github.com/adamslab-ub/GNN-ReCo-Benchmark/ tree/GNN NavCo, 2026. 14
2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.