Learning to Feel Materials from Multisensory Tactile Data via Interpretable Models
Pith reviewed 2026-06-29 06:57 UTC · model grok-4.3
The pith
Multisensory tactile data from pressing, static contact, and sliding, especially thermal cues, improves models of human material perception and classification.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
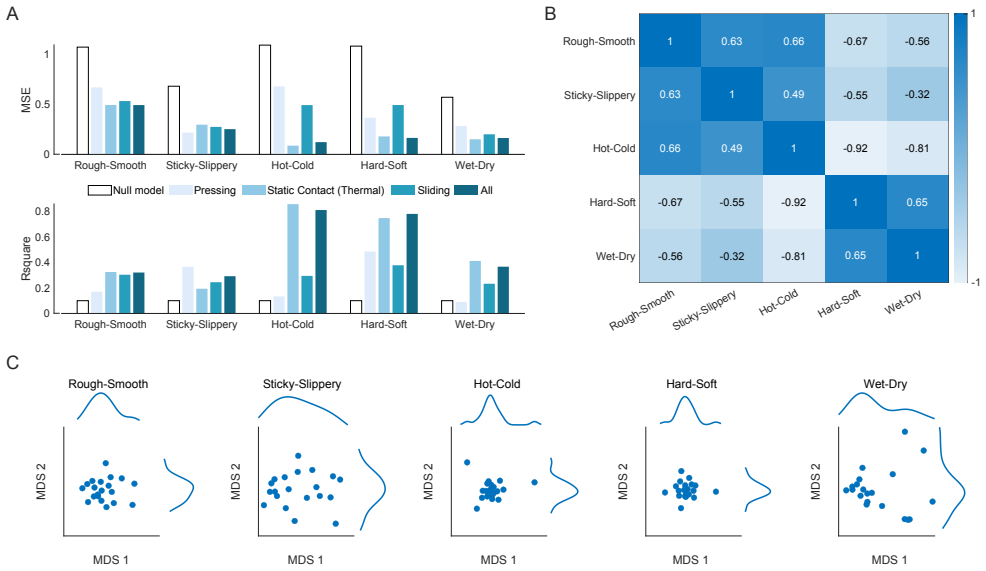
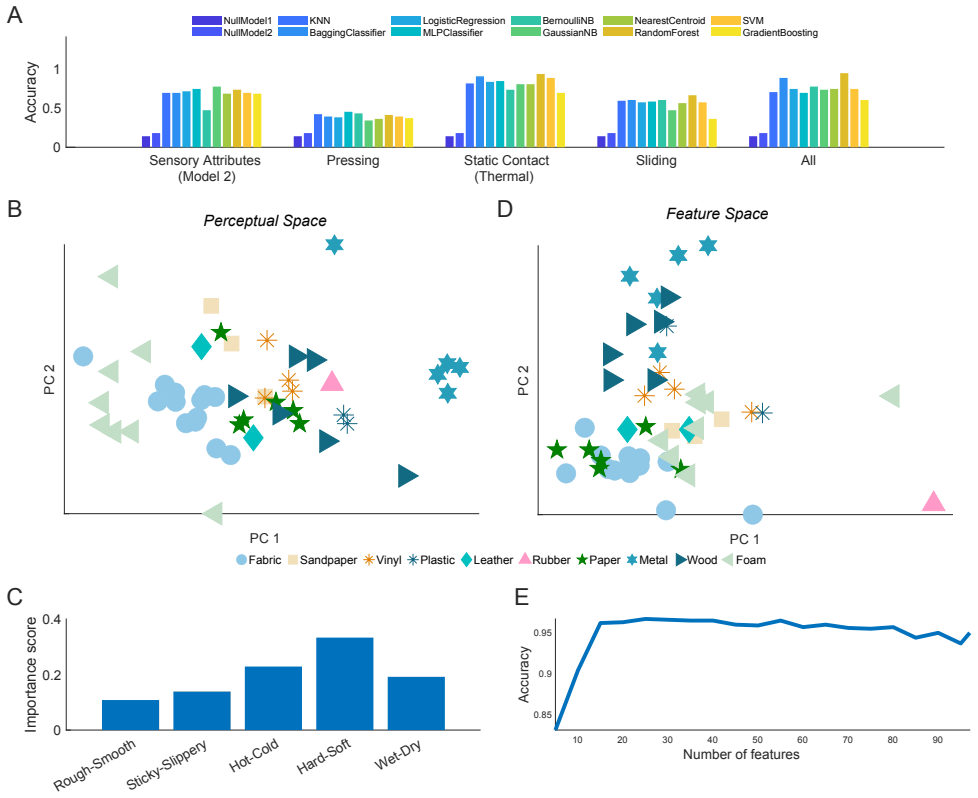
Combining information from pressing, static contact, and sliding interactions improves prediction accuracy, and thermal cues are particularly informative for both perceptual modeling and material classification. These findings highlight the importance of thermal and compliance cues, which remain underrepresented in current robotic fingers and haptic displays. Incorporating such cues may enhance artificial systems' ability to approximate human material perception and guide the design of more perceptually grounded haptic interfaces.
What carries the argument
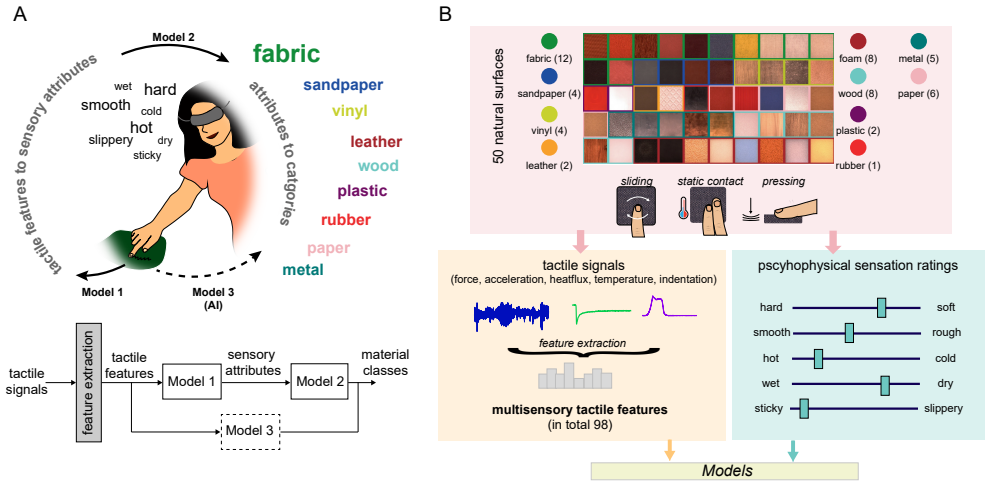
Three interconnected models: one mapping finger-surface interaction features to psychophysical sensory attributes, one classifying materials from those attributes, and one classifying directly from tactile features.
If this is right
- Combining information from pressing, static contact, and sliding interactions improves prediction accuracy.
- Thermal cues are particularly informative for both perceptual modeling and material classification.
- Thermal and compliance cues remain underrepresented in current robotic fingers and haptic displays.
- Incorporating thermal and compliance cues may enhance artificial systems' ability to approximate human material perception.
Where Pith is reading between the lines
- Sensor designers could prioritize adding thermal sensing to robotic fingers to close the gap with human perception.
- The framework might extend to predicting perception of novel or composite materials not in the original dataset.
- Haptic interfaces in virtual reality could simulate temperature changes to improve realism based on these perceptual links.
Load-bearing premise
The chosen tactile features and psychophysical sensory attributes sufficiently capture the relationship between low-level signals and human perceptual representations without significant loss or bias from sensor limitations or participant variability.
What would settle it
A controlled test on new participants where a model excluding thermal data matches the accuracy of the full multisensory model on material classification would falsify the claim that thermal cues are particularly informative.
Figures

read the original abstract
Human tactile perception of materials relies on complex multisensory touch cues, yet the relationship between low-level tactile signals and perceptual representations remains poorly understood. This knowledge gap hinders the integration of touch in digital environments and the development of robots capable of human-like tactile perception. Here, we present an interpretable computational framework for modeling human material perception and recognition using multisensory touch data. Our framework comprises three interconnected models: Model 1 maps finger-surface interaction features to psychophysical sensory attributes, Model 2 classifies materials based on these perceptual representations, and Model 3 directly classifies materials from tactile features. The results showed that combining information from pressing, static contact, and sliding interactions improves prediction accuracy, and that thermal cues are particularly informative for both perceptual modeling and material classification. These findings highlight the importance of thermal and compliance cues, which remain underrepresented in current robotic fingers and haptic displays. Incorporating such cues may enhance artificial systems' ability to approximate human material perception and guide the design of more perceptually grounded haptic interfaces.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents an interpretable computational framework with three interconnected models for human material perception from multisensory tactile data: Model 1 maps finger-surface interaction features (from pressing, static contact, and sliding) to psychophysical sensory attributes; Model 2 classifies materials from those perceptual representations; and Model 3 classifies materials directly from the tactile features. The central results indicate that combining the three interaction types improves prediction accuracy and that thermal cues are particularly informative for both perceptual modeling and material classification.
Significance. If the reported results hold, the work is significant for robotics and haptics because it quantifies the contribution of underrepresented thermal and compliance cues to human-like material perception and provides an interpretable pipeline that could guide the design of more perceptually grounded artificial tactile systems. The use of cross-validation, feature ablation, and participant-level consistency checks constitutes a strength that directly supports the multisensory-combination claim.
minor comments (2)
- [Abstract] Abstract: the claim of improved accuracy is stated without any numerical values, error bars, dataset size, or validation details, which reduces the standalone readability of the abstract even though the full text supplies these.
- The weakest assumption noted in the stress-test (that chosen tactile features and psychophysical attributes capture the low-level to perceptual mapping without significant sensor or participant bias) is addressed by the reported participant-level checks, so it does not constitute a load-bearing concern.
Simulated Author's Rebuttal
We thank the referee for their positive assessment of the manuscript, including the recognition of the framework's interpretability, the value of cross-validation and ablation analyses, and the potential significance for robotics and haptics. The recommendation for minor revision is noted.
Circularity Check
No significant circularity
full rationale
The paper describes an empirical pipeline of three fitted models (feature-to-attribute mapping, attribute-based classification, and direct feature classification) evaluated via cross-validation and feature ablation on collected multisensory tactile data. No equations, derivations, or self-referential predictions appear in the abstract or described framework; results are reported as statistical outcomes from held-out data rather than by-construction identities. No load-bearing self-citations, uniqueness theorems, or ansatzes are invoked. The central claim rests on observable performance differences across interaction types and modalities, which are directly testable against the experimental dataset and participant responses.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Klatzky, R. L. Haptic perception and its relation to action.Annu. Rev. Psychol.76, 227–250, DOI: https://doi.org/10.1146/ annurev-psych-011624-101129 (2025)
2025
-
[2]
Lederman, S. J. & Klatzky, R. L. Hand movements: A window into haptic object recognition.Cogn. Psychol.19, 342–368, DOI: https://doi.org/10.1016/0010-0285(87)90008-9 (1987)
-
[3]
Callier, T., Saal, H. P., Davis-Berg, E. C. & Bensmaia, S. J. Kinematics of unconstrained tactile texture exploration.J. Neurophysiol.113, 3013–3020, DOI: 10.1152/jn.00703.2014 (2015). PMID: 25744883, https://doi.org/10.1152/jn.00703. 2014
-
[4]
Okamoto, S., Nagano, H. & Yamada, Y . Psychophysical dimensions of tactile perception of textures.IEEE Transactions on Haptics6, 81–93, DOI: 10.1109/TOH.2012.32 (2013)
-
[5]
Drewing, K., Weyel, C., Celebi, H. & Kaya, D. Systematic relations between affective and sensory material dimensions in touch.IEEE Transactions on Haptics11, 611–622, DOI: 10.1109/TOH.2018.2836427 (2018)
-
[6]
Hollins, M., Faldowski, R., Rao, S. & Young, F. Perceptual dimensions of tactile surface texture: A multidimensional scaling analysis.Percept.&Pscyhophysics54, 697–705, DOI: 10.3758/BF03211795 (1993)
-
[7]
Bergmann Tiest, W. M. & Kappers, A. M. Analysis of haptic perception of materials by multidimensional scaling and physical measurements of roughness and compressibility.Acta Psychol.121, 1–20, DOI: https://doi.org/10.1016/j.actpsy. 2005.04.005 (2006)
-
[8]
Skedung, L., Harris, K., Collier, E. S. & Rutland, M. The finishing touches: the role of friction and roughness in haptic perception of surface coatings.Exp. Brain Res.238, 1511–1524, DOI: 10.1007/s00221-020-05831-w (2020). 9.Vardar, Y ., Wallraven, C. & Kuchenbecker, K. J. Fingertip interaction metrics correlate with visual and haptic perception of real ...
-
[9]
Yoshioka, T., Bensmaia, S. J., Craig, J. C. & Hsiao, S. S. Texture perception through direct and indirect touch: An analysis of perceptual space for tactile textures in two modes of exploration.Somatosens. Mot. Res.24, 53–70, DOI: 10.1080/08990220701318163 (2009)
-
[10]
Strese, M., Brudermueller, L., Kirsch, J. & Steinbach, E. Haptic material analysis and classification inspired by human exploratory procedures.IEEE Transactions on Haptics13, 404–424, DOI: 10.1109/TOH.2019.2952118 (2020)
-
[11]
Devillard, A. W. M., Ramasamy, A., Cheng, X., Faux, D. & Burdet, E. Tactile, audio, and visual dataset during bare finger interaction with textured surfaces.Sci. Data12, 484 (2025)
2025
-
[12]
Semi-Supervised Haptic Material Recognition for Robots using Generative Adversarial Networks
Erickson, Z., Chernova, S. & Kemp, C. C. Semi-supervised haptic material recognition for robots using generative adversarial networks (2017). 1707.02796
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[13]
& Quinn, J
Shuvo, M., Coleman, S., Kerr, D. & Quinn, J. Material classification using visio-tactile sensor for haptic feedback generation. 1–20 (2025)
2025
-
[14]
Fishel, J. A. & Loeb, G. E. Bayesian exploration for intelligent identification of textures.Front. NeuroroboticsV olume 6 - 2012, DOI: 10.3389/fnbot.2012.00004 (2012). 9/12
-
[15]
& Takahashi, S
Saga, S., Agatsuma, S., Vasilache, S. & Takahashi, S. Machine learning-based classification and generation of vibrotactile information.Int. J. On Adv. Networks Serv.13, 115–124 (2020)
2020
-
[16]
& Jiang, H
Zhang, P., Du, D. & Jiang, H. Classification of visual-tactile fusion object attributes based on the gamp attention mechanism. In2024 IEEE 6th Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), vol. 6, 1279–1282 (2024)
2024
-
[17]
Multi.18, 2407–2416 (2016)
Zheng, H.et al.Deep learning for surface material classification using haptic and visual information.Trans. Multi.18, 2407–2416 (2016)
2016
-
[18]
Richardson, B. A. & Kuchenbecker, K. J. Learning to predict perceptual distributions of haptic adjectives.Front. NeuroroboticsV olume 13 - 2019, DOI: 10.3389/fnbot.2019.00116 (2020)
-
[19]
K, P., Chaudhuri, S. & Chaudhuri, S. Perceptnet: Learning perceptual similarity of haptic textures in presence of unorderable triplets. In2019 IEEE World Haptics Conference (WHC), 163–168, DOI: 10.1109/WHC.2019.8816141 (2019)
-
[20]
Lim, C., Kim, G., Kang, S.-Y ., Seifi, H. & Park, G. Can a machine feel vibrations?: Predicting roughness and emotional responses to vibration tactons via a neural network.IEEE Transactions on Haptics18, 542–555, DOI: 10.1109/TOH.2025. 3568804 (2025)
-
[21]
Baumgartner, E., Wiebel, C. B. & Gegenfurtner, K. R. Visual and haptic representations of material properties.Multisensory research26 5, 429–55 (2013)
2013
-
[22]
Strese, M., Schuwerk, C., Iepure, A. & Steinbach, E. Multimodal feature-based surface material classification.IEEE Transactions on Haptics10, 226–239, DOI: 10.1109/TOH.2016.2625787 (2017)
-
[23]
Richardson, B., Vardar, Y ., Wallraven, C. & Kuchenbecker, K. Learning to feel textures: Predicting perceptual similarities from unconstrained finger-surface interactions.IEEE Transactions on Haptics15, 705–717, DOI: 10.1109/TOH.2022. 3212701 (2022)
-
[24]
Balasubramanian, J., Kodak, B. & Vardar, Y . Sens3: Multisensory database of finger-surface interactions and corresponding sensations. In Kajimoto, H.et al.(eds.)Haptics, vol. 1 ofLecture Notes in Computer Science (including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics), 262–277, DOI: 10.1007/978-3-031-70058-3_21 ...
-
[25]
& Hodges, J
Fix, E. & Hodges, J. L. Discriminatory analysis—Nonparametric discrimination: Consistency properties. Tech. Rep. 21-49-004, USAF School of Aviation Medicine, Randolph Field, Texas (1951)
1951
-
[26]
Cover, T. M. & Hart, P. E. Nearest neighbor pattern classification.IEEE Transactions on Inf. Theory13, 21–27, DOI: 10.1109/TIT.1967.1053964 (1967). CiteSeerX: 10.1.1.68.2616. 28.Cortes, C. & Vapnik, V . Support-vector networks.Mach. Learn.20, 273–297, DOI: 10.1007/BF00994018 (1995)
-
[27]
Wang, A. & Zou, L. Persistent homology for structural characterization in disordered systems.Phys. Rev. E111, 045306, DOI: 10.1103/PhysRevE.111.045306 (2025)
-
[28]
Ho, T. K. Random decision forests. InProceedings of the 3rd International Conference on Document Analysis and Recognition, 278–282 (Montreal, QC, 1995). Archived from the original on 17 April 2016. Retrieved 5 June 2016
1995
-
[29]
Ho, T. K. The random subspace method for constructing decision forests.IEEE Transactions on Pattern Analysis Mach. Intell.20, 832–844, DOI: 10.1109/34.709601 (1998). Bibcode: 1998ITPAM..20..832T
-
[30]
& Friedman, J
Hastie, T., Tibshirani, R. & Friedman, J. H.10. Boosting and Additive Trees, 337–384 (Springer, New York, 2009), 2 edn. Archived from the original on 10 November 2009
2009
-
[31]
Sagi, O. & Rokach, L. Approximating xgboost with an interpretable decision tree.Inf. Sci.572, 522–542, DOI: https://doi.org/10.1016/j.ins.2021.05.055 (2021)
-
[32]
Mathematics of Control, Signals and Systems , author =
Cybenko, G. Approximation by superpositions of a sigmoidal function.Math. Control. Signals, Syst.2, 303–314, DOI: 10.1007/BF02551274 (1989)
-
[33]
& Sosso, G
Wang, A. & Sosso, G. C. Graph-based descriptors for condensed matter.Phys. Rev. E111, 064302, DOI: 10.1103/ PhysRevE.111.064302 (2025)
2025
-
[34]
Ho, H.-N. Material recognition based on thermal cues: Mechanisms and applications.Temperature5, 36–55, DOI: 10.1080/23328940.2017.1372042 (2017)
-
[35]
Filingeri, D., Fournet, D., Hodder, S. & Havenith, G. Why wet feels wet? a neurophysiological model of human cutaneous wetness sensitivity.J. Neurophysiol.112, 1457–1469, DOI: 10.1152/jn.00120.2014 (2014). 10/12
-
[36]
Bergmann Tiest, W. M. Tactual perception of material properties.Vis. Res.50, 2775–2782, DOI: https://doi.org/10.1016/j. visres.2010.10.005 (2010). Perception and Action: Part I
work page doi:10.1016/j 2010
-
[37]
Nam, S., Vardar, Y ., Gueorguiev, D. & Kuchenbecker, K. J. Physical variables underlying tactile stickiness during fingerpad detachment.Front. Neurosci.V olume 14 - 2020, DOI: 10.3389/fnins.2020.00235 (2020)
-
[38]
Lepora, N. F. Tactile robotics: Past and future.The Int. J. Robotics Res.0, 02783649261421615, DOI: 10.1177/ 02783649261421615 (2026). https://journals.sagepub.com/doi/pdf/10.1177/02783649261421615
-
[39]
Chen, Z., Huang, Y ., Zhang, B., Sun, D. & Yu, X. Deformable materials and structures in wearable haptic interfaces.Nat. Rev. Mater.DOI: 10.1038/s41578-025-00877-0 (2026)
-
[40]
Biswas, S. & Visell, Y . Emerging material technologies for haptics.Adv. Mater. Technol.4, 1900042, DOI: https: //doi-org.tudelft.idm.oclc.org/10.1002/admt.201900042 (2019). https://advanced-onlinelibrary-wiley-com.tudelft.idm.oclc. org/doi/pdf/10.1002/admt.201900042
-
[41]
& Anh, K
Vardar, Y ., Jeong, H. & Anh, K. Multimodal haptic device enabling naturalistic surface rendering during active touch (2025)
2025
-
[42]
Kodak, B. L. & Vardar, Y . Feelpen: A haptic stylus displaying multimodal texture feels on touchscreens.IEEE/ASME Transactions on Mechatronics28, 2930–2940, DOI: 10.1109/TMECH.2023.3264787 (2023). Acknowledgements This study was partially funded by the Dutch Research Council (NWO) under the VENI scheme (ID: 19153) and the European Research Council (ERC) u...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.