A study on a Real-Time VR-Based Teleoperation Framework for Manipulator in Dynamic Environment
Pith reviewed 2026-06-28 22:23 UTC · model grok-4.3
The pith
A VR teleoperation framework for a 7-DoF manipulator uses GPU inverse kinematics and trajectory optimization to follow operator commands while generating safe detours around static and moving obstacles.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
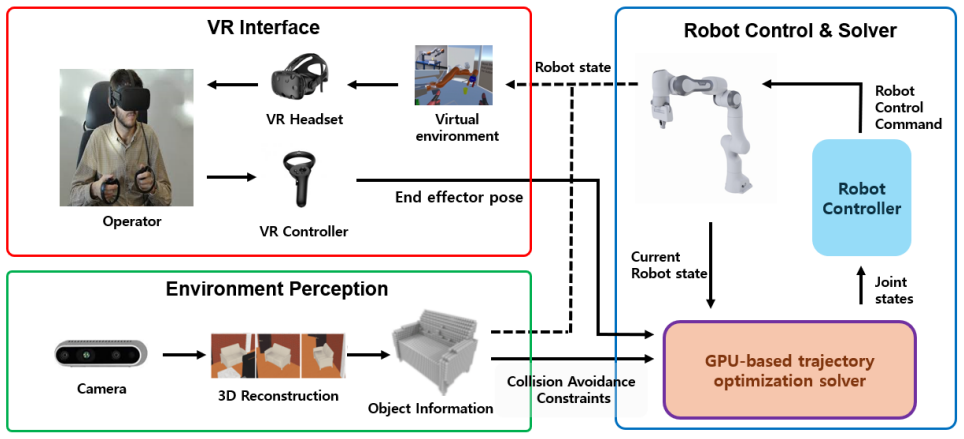
The framework integrates GPU-accelerated inverse kinematics and trajectory optimization within a VR interface to generate feasible joint commands at each control cycle under robot constraints. Experiments with a 7-DoF manipulator demonstrate stable online behavior and collision-aware motion generation across obstacle-free, static-obstacle, and moving-obstacle environments. The results indicate that the proposed approach generates motion consistent with the operator's command while producing safe detours when obstacles interfere with the commanded path.
What carries the argument
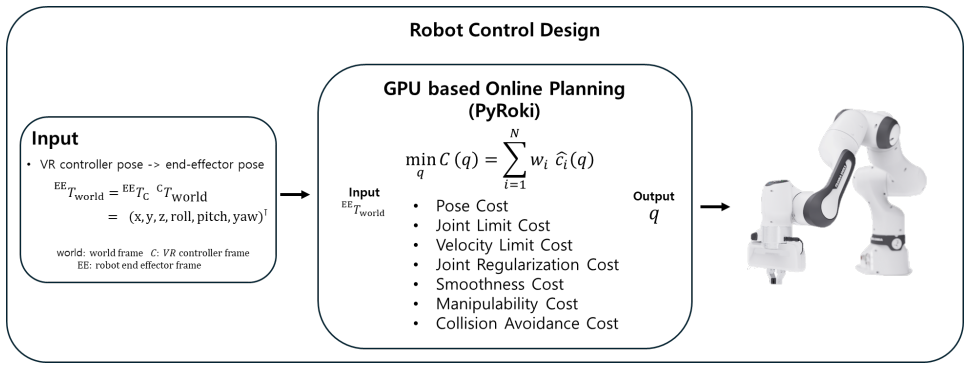
GPU-accelerated inverse kinematics combined with trajectory optimization, which computes feasible joint commands at each control cycle to enforce collision avoidance while respecting operator input.
If this is right
- Motion remains consistent with the operator's command while still avoiding obstacles.
- Safe detours appear automatically when obstacles block the commanded path.
- Stable performance holds in obstacle-free, static-obstacle, and moving-obstacle settings.
- Feasible joint commands are issued at each control cycle under the robot's kinematic constraints.
Where Pith is reading between the lines
- The same real-time adjustment mechanism could apply to other robot morphologies or task spaces where workspace changes occur.
- Automatic collision handling might reduce the skill threshold for operators by compensating for imprecise VR inputs.
- Extending the cycle-time guarantees to multi-robot teams would address coordination in shared dynamic workspaces.
Load-bearing premise
GPU-accelerated inverse kinematics combined with trajectory optimization can produce feasible joint commands at each control cycle with low enough latency to remain stable under dynamic obstacles and operator mistakes.
What would settle it
An experiment in which the system produces colliding motions or loses stability when obstacles move rapidly and the operator issues sudden conflicting commands would show the central claim does not hold.
Figures


read the original abstract
Robot teleoperation enables safe, non-contact task execution in hazardous environments where direct human access is difficult, and its application has expanded with recent VR technologies. Many VR teleoperation studies, however, have primarily served as data-collection tools for robot imitation learning, so they often do not explicitly address dynamic obstacles, workspace changes, or collision risks during operation. For real deployment aimed at operator safety, teleoperation must react to dynamic situations with low latency and remain robust to mistakes made by inexperienced operators. This paper presents a VR teleoperation framework that supports real-time manipulation while handling collisions with both static and moving obstacles. The framework integrates GPU-accelerated inverse kinematics and trajectory optimization within a VR interface to generate feasible joint commands at each control cycle under robot constraints. Experiments with a 7-DoF manipulator demonstrate stable online behavior and collision-aware motion generation across three scenarios: obstacle-free, static-obstacle, and moving-obstacle environments. The results indicate that the proposed approach generates motion consistent with the operator's command while producing safe detours when obstacles interfere with the commanded path.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a VR-based teleoperation framework for a 7-DoF manipulator that integrates GPU-accelerated inverse kinematics and trajectory optimization to generate collision-aware joint commands in real time. It claims that the system produces motion consistent with operator commands while generating safe detours around both static and moving obstacles, with experiments in three scenarios (obstacle-free, static-obstacle, moving-obstacle) demonstrating stable online behavior.
Significance. If the real-time latency and reliability claims hold under quantitative scrutiny, the work would provide a practical system-level contribution to safe VR teleoperation in dynamic environments, addressing gaps in handling moving obstacles and operator errors that many prior VR teleoperation studies overlook. The integration of GPU IK with trajectory optimization is a standard but useful engineering approach for this domain.
major comments (1)
- [Abstract / Experiments] Abstract and Experiments section: the central claims of 'real-time manipulation', 'stable online behavior', and 'collision-aware motion generation' at each control cycle rest on the untested assumption that the GPU-accelerated IK + trajectory optimization loop returns feasible commands with sufficiently low latency under moving obstacles. No cycle-time statistics, end-to-end latency figures, optimization failure rates, or success-rate metrics (with error bars) are reported for any of the three scenarios, leaving the weakest assumption unaddressed.
minor comments (1)
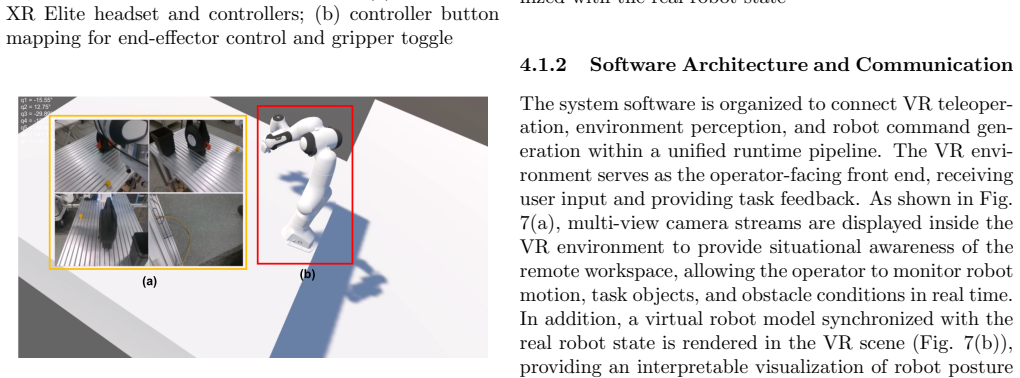
- [Framework description] The description of how the VR interface maps operator commands to the optimization objective and how dynamic obstacle positions are updated in the trajectory planner could be clarified with a block diagram or pseudocode.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback highlighting the need for quantitative validation of the real-time performance claims. We address the major comment below.
read point-by-point responses
-
Referee: [Abstract / Experiments] Abstract and Experiments section: the central claims of 'real-time manipulation', 'stable online behavior', and 'collision-aware motion generation' at each control cycle rest on the untested assumption that the GPU-accelerated IK + trajectory optimization loop returns feasible commands with sufficiently low latency under moving obstacles. No cycle-time statistics, end-to-end latency figures, optimization failure rates, or success-rate metrics (with error bars) are reported for any of the three scenarios, leaving the weakest assumption unaddressed.
Authors: We agree that the manuscript does not report the requested quantitative metrics. The current text describes the experiments only qualitatively as demonstrating 'stable online behavior' without cycle-time statistics, latency figures, failure rates, or success-rate metrics with error bars. In the revision we will add these measurements to the Experiments section, including average/maximum control-cycle times, end-to-end latency, optimization success/failure rates, and trial statistics with standard deviations for all three scenarios. revision: yes
Circularity Check
No circularity: system-integration paper with no derivation chain or fitted predictions
full rationale
The manuscript describes a VR teleoperation framework that integrates existing GPU-accelerated inverse kinematics and trajectory optimization components. No equations, parameter fits, predictions, or uniqueness theorems are presented that could reduce to their own inputs. The central claims rest on experimental demonstration of the integrated system rather than any internal mathematical reduction. This matches the reader's assessment of a score-1 system-integration claim whose validity is external to any derivation.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
BEAVR: Bimanual, multi-Embodiment, Accessible, Virtual Reality Teleoperation System for Robots
A. Posadas-Nava, A. Carrasco, and R. Linares, “Beavr: Bimanual, multi-embodiment, accessible, virtual reality teleoperation system for robots,” arXiv preprint arXiv:2508.09606, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[2]
F. A. Wasay, M. A. Rahman, and H. Ghouse, “Gamora: A gesture articulated meta operative robotic arm for hazardous material handling in containment-level environments,”arXiv preprint arXiv:2506.14513, 2025. 8
-
[3]
Assisting manipulation and grasping in robot teleoperation with augmented reality visual cues,
S. Arevalo Arboleda, F. R¨ ucker, T. Dierks, and J. Gerken, “Assisting manipulation and grasping in robot teleoperation with augmented reality visual cues,” inProceedings of the 2021 CHI conference on human factors in computing systems, 2021, pp. 1–14
2021
-
[4]
Augmented reality-based robot teleoperation sys- tem using rgb-d imaging and attitude teaching de- vice,
Y. Pan, C. Chen, D. Li, Z. Zhao, and J. Hong, “Augmented reality-based robot teleoperation sys- tem using rgb-d imaging and attitude teaching de- vice,”Robotics and Computer-Integrated Manufac- turing, vol. 71, p. 102167, 2021
2021
-
[5]
Virtual reality-based dynamic scene recreation and robot teleoperation for hazardous environments,
A. C. Bavelos, E. Anastasiou, N. Dimitropoulos, G. Michalos, and S. Makris, “Virtual reality-based dynamic scene recreation and robot teleoperation for hazardous environments,”Computer-Aided Civil and Infrastructure Engineering, vol. 40, no. 3, pp. 392– 408, 2025
2025
-
[6]
Development of an optical tracking based teleoperation system with virtual reality,
Y. Su, M. Ahmadi, C. Bartneck, F. Steinicke, and X. Chen, “Development of an optical tracking based teleoperation system with virtual reality,” in2019 14th IEEE conference on industrial electronics and applications (ICIEA). IEEE, 2019, pp. 1606–1611
2019
-
[7]
Enhancing real-time robot teleoperation with immersive virtual reality in indus- trial iot networks,
T. Luu, Q. Nguyen, T. Tran, M. Tran, S. Ding, J. Kua, and T. Hoang, “Enhancing real-time robot teleoperation with immersive virtual reality in indus- trial iot networks,”The International Journal of Ad- vanced Manufacturing Technology, vol. 139, no. 11, pp. 6233–6257, 2025
2025
-
[8]
Virtual reality environment for industrial robot control and path design,
T. Togias, C. Gkournelos, P. Angelakis, G. Micha- los, and S. Makris, “Virtual reality environment for industrial robot control and path design,”Procedia CIRP, vol. 100, pp. 133–138, 2021
2021
-
[9]
Closed-loop inverse kine- matics for redundant robots: Comparative assess- ment and two enhancements,
A. Colom´ e and C. Torras, “Closed-loop inverse kine- matics for redundant robots: Comparative assess- ment and two enhancements,”IEEE/ASME Trans- actions On Mechatronics, vol. 20, no. 2, pp. 944–955, 2014
2014
-
[10]
Open-television: Teleoperation with immersive active visual feedback,
X. Cheng, J. Li, S. Yang, G. Yang, and X. Wang, “Open-television: Teleoperation with immersive active visual feedback,”arXiv preprint arXiv:2407.01512, 2024
-
[11]
Teleo- plab: Accessible and intuitive teleoperation of a robotic manipulator for remote labs,
Z. Chen, Y. J. Yoon, R. Bautista-Montesano, Z. Zhao, A. Mandlekar, and J. Liu, “Teleo- plab: Accessible and intuitive teleoperation of a robotic manipulator for remote labs,”arXiv preprint arXiv:2509.05547, 2025
-
[12]
Trac-ik: An open-source library for improved solving of generic inverse kine- matics,
P. Beeson and B. Ames, “Trac-ik: An open-source library for improved solving of generic inverse kine- matics,” in2015 IEEE-RAS 15th International Con- ference on Humanoid Robots (Humanoids). IEEE, 2015, pp. 928–935
2015
-
[13]
Pyroki: A modular toolkit for robot kinematic optimization,
C. M. Kim, B. Yi, H. Choi, Y. Ma, K. Goldberg, and A. Kanazawa, “Pyroki: A modular toolkit for robot kinematic optimization,” in2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2025, pp. 1312–1319
2025
-
[14]
nvblox: Gpu-accelerated incremental signed dis- tance field mapping,
A. Millane, H. Oleynikova, E. Wirbel, R. Steiner, V. Ramasamy, D. Tingdahl, and R. Siegwart, “nvblox: Gpu-accelerated incremental signed dis- tance field mapping,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 2698–2705
2024
-
[15]
Density-based spatial clustering of applications with noise,
M. Ester, H.-P. Kriegel, J. Sander, and X. Xu, “Density-based spatial clustering of applications with noise,” inInt. Conf. knowledge discovery and data mining, vol. 240, no. 6, 1996
1996
-
[16]
Loreto and S
S. Loreto and S. P. Romano,Real-time communica- tion with WebRTC: peer-to-peer in the browser. ” O’Reilly Media, Inc.”, 2014
2014
-
[17]
Hintjens,ZeroMQ: messaging for many applica- tions
P. Hintjens,ZeroMQ: messaging for many applica- tions. ” O’Reilly Media, Inc.”, 2013. 9
2013
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.