Enhancing Computer Vision Model Generalization in Warehouse Facilities: A Case Study on Anomaly Detection in Vertical Material Handling Systems
Pith reviewed 2026-06-28 23:06 UTC · model grok-4.3
The pith
Lab-trained vision models generalize to warehouse anomaly detection without site-specific retraining or annotation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
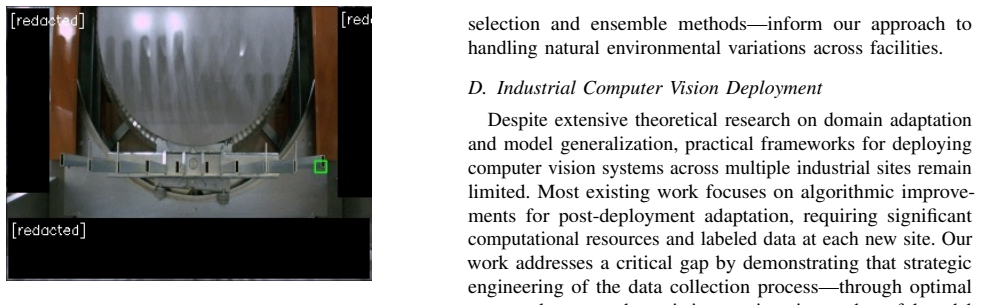
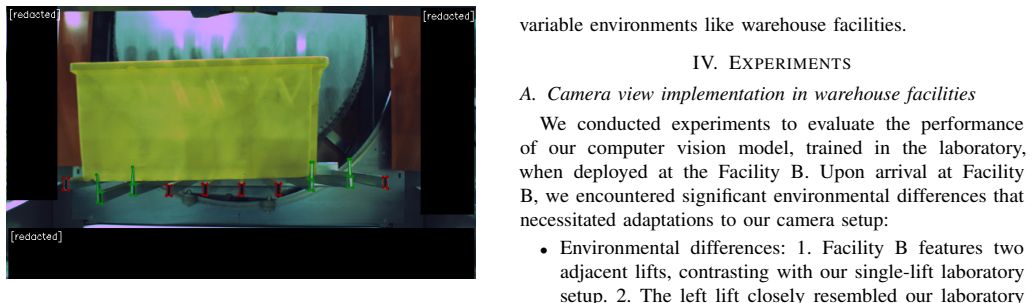
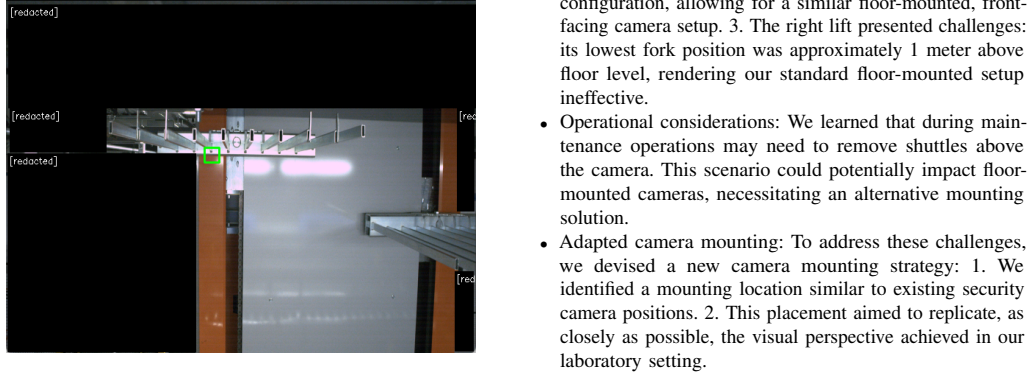
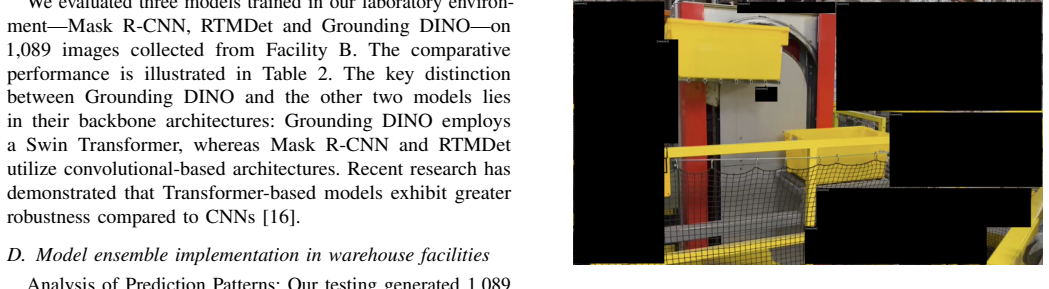
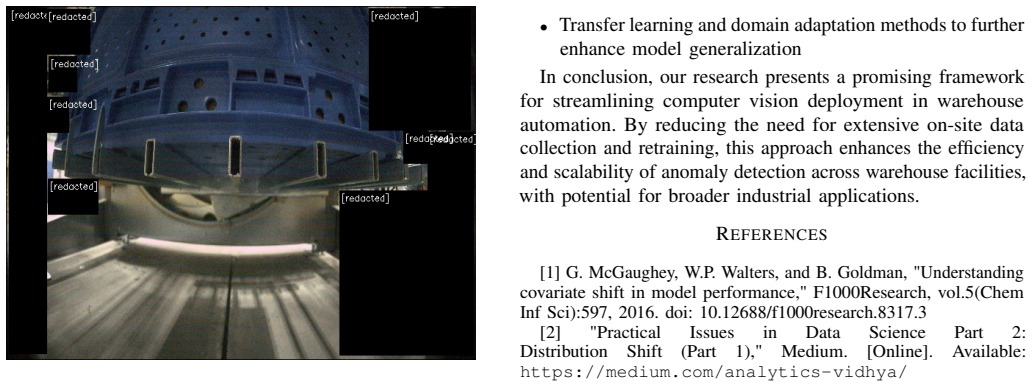
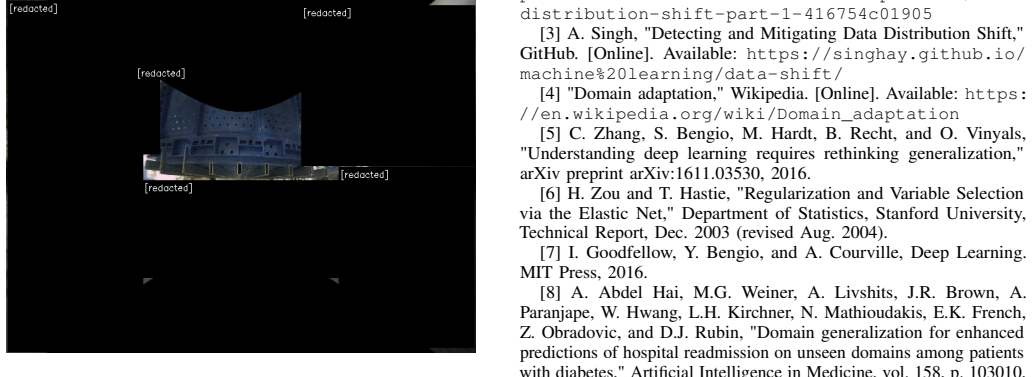
Performing the standard procedure solely in a laboratory setting, then applying optimal camera placement, strategic image triggering, careful model selection, and model ensemble, enables effective generalization from laboratory conditions to diverse warehouse facilities environments for anomaly detection in forks of vertical material handling systems.
What carries the argument
The combination of optimal camera placement, strategic image triggering, model selection, and model ensemble applied to laboratory-trained models.
If this is right
- Deployment in new warehouses reduces to camera mounting, image collection, and model deployment without annotation or retraining.
- Significant resources and time are saved compared with repeating the full training cycle at each facility.
- The approach applies to anomaly detection tasks on vertical material handling system forks across multiple warehouse environments.
- Model ensembles contribute to maintaining performance when individual models encounter facility-specific variations.
Where Pith is reading between the lines
- The same optimization steps might reduce retraining needs for other industrial vision tasks if similar controlled lab conditions can be defined.
- Further tests across a broader set of lighting, dust, or motion conditions would clarify the practical limits of the observed generalization.
- The method could lower barriers for smaller facilities that lack resources for repeated annotation campaigns.
Load-bearing premise
Laboratory conditions and the chosen optimizations capture enough environmental variability across real warehouse facilities that no site-specific retraining or annotation is required.
What would settle it
A warehouse facility in which the same camera placement and triggering rules produce clearly lower anomaly detection accuracy than observed in the lab or other tested sites.
Figures
read the original abstract
Deploying computer vision models in Warehouse Facilities traditionally requires extensive resources for camera mounting, image collection, annotation, training, and deployment - a process often needing repetition in each new environment due to camera mounting constraints and environmental variability. This paper explores an innovative approach to streamline this process by conducting the standard procedure solely in a laboratory setting, focusing on vertical material handling systems and anomaly detection in forks of the systems. Through extensive experimentation, we have found that combining optimal camera placement, strategic image triggering, careful model selection and model ensemble enables effective generalization from laboratory conditions to diverse warehouse facilities environments, potentially transforming warehouse automation implementation by simplifying warehouse facilities deployment to just camera mounting, image collection, and model deployment, thereby saving significant resources and time typically spent on image annotation and model retraining. This is an experimental research study and not a production deployment.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that anomaly detection models for forks in vertical material handling systems can be fully developed and trained in a laboratory setting, then deployed directly to diverse real-world warehouse facilities. This is enabled by combining optimal camera placement, strategic image triggering, careful model selection, and model ensembles, eliminating the need for site-specific image annotation or model retraining.
Significance. If the generalization result holds with quantitative support, the work would offer a practical route to lower the cost and time of CV deployment in industrial logistics by confining expensive labeling and training steps to a single controlled environment.
major comments (1)
- [Abstract] Abstract: the assertion of 'effective generalization' from laboratory conditions to 'diverse warehouse facilities environments' is presented without any quantitative transfer metrics, baseline comparisons, error bars, dataset statistics, or description of how generalization performance was measured across held-out sites.
minor comments (1)
- The manuscript should supply a methods section detailing the laboratory camera geometry, triggering logic, the exact model architectures and ensemble procedure, and the environmental differences (lighting, vibration, background) between lab and warehouse test sites.
Simulated Author's Rebuttal
We thank the referee for their review and for highlighting the need for quantitative support in the abstract. We agree that the abstract should be revised to include key metrics, baselines, and evaluation details to strengthen the presentation of our generalization claims. We address the comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the assertion of 'effective generalization' from laboratory conditions to 'diverse warehouse facilities environments' is presented without any quantitative transfer metrics, baseline comparisons, error bars, dataset statistics, or description of how generalization performance was measured across held-out sites.
Authors: We agree that the abstract as currently written does not include these quantitative elements. The full manuscript reports lab-to-warehouse transfer results with metrics (including per-site F1 scores, precision/recall, and comparisons to single-model baselines), dataset sizes (lab training images vs. warehouse test images), and evaluation on held-out warehouse sites. To address the comment directly, we will revise the abstract to summarize the primary transfer metrics, note the use of held-out sites, and indicate the evaluation protocol. revision: yes
Circularity Check
No circularity; purely experimental claims with no derivations or self-referential fits
full rationale
The paper presents an experimental study claiming that lab-based optimizations (camera placement, image triggering, model selection, ensemble) enable generalization to warehouses without site-specific retraining. No equations, parameter fitting, or mathematical derivations appear in the provided text. The generalization claim rests on 'extensive experimentation' rather than any reduction to inputs by construction, self-citation chains, or renamed known results. No load-bearing self-citations or uniqueness theorems are present. This matches the default expectation of a non-circular experimental paper.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Understanding covariate shift in model performance,
G. McGaughey, W.P. Walters, and B. Goldman, "Understanding covariate shift in model performance," F1000Research, vol.5(Chem Inf Sci):597, 2016. doi: 10.12688/f1000research.8317.3
-
[2]
Practical Issues in Data Science Part 2: Distribution Shift (Part 1),
"Practical Issues in Data Science Part 2: Distribution Shift (Part 1)," Medium. [Online]. Available: https://medium.com/analytics-vidhya/ practical-issues-in-data-science-part-2-\ distribution-shift-part-1-416754c01905
-
[3]
Detecting and Mitigating Data Distribution Shift,
A. Singh, "Detecting and Mitigating Data Distribution Shift," GitHub. [Online]. Available: https://singhay.github.io/ machine%20learning/data-shift/
-
[4]
Domain adaptation,
"Domain adaptation," Wikipedia. [Online]. Available: https: //en.wikipedia.org/wiki/Domain_adaptation
-
[5]
Understanding deep learning requires rethinking generalization
C. Zhang, S. Bengio, M. Hardt, B. Recht, and O. Vinyals, "Understanding deep learning requires rethinking generalization," arXiv preprint arXiv:1611.03530, 2016
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[6]
Regularization and Variable Selection via the Elastic Net,
H. Zou and T. Hastie, "Regularization and Variable Selection via the Elastic Net," Department of Statistics, Stanford University, Technical Report, Dec. 2003 (revised Aug. 2004)
2003
-
[7]
Goodfellow, Y
I. Goodfellow, Y . Bengio, and A. Courville, Deep Learning. MIT Press, 2016
2016
-
[8]
Domain generalization for enhanced predictions of hospital readmission on unseen domains among patients with diabetes,
A. Abdel Hai, M.G. Weiner, A. Livshits, J.R. Brown, A. Paranjape, W. Hwang, L.H. Kirchner, N. Mathioudakis, E.K. French, Z. Obradovic, and D.J. Rubin, "Domain generalization for enhanced predictions of hospital readmission on unseen domains among patients with diabetes," Artificial Intelligence in Medicine, vol. 158, p. 103010, Dec. 2024
2024
-
[9]
Explaining and Harnessing Adversarial Examples
I. J. Goodfellow, J. Shlens, and C. Szegedy, "Explaining and harnessing adversarial examples," arXiv preprint arXiv:1412.6572, 2014
work page internal anchor Pith review Pith/arXiv arXiv 2014
-
[10]
Adversarial machine learning,
"Adversarial machine learning," Wikipedia. [Online]. Avail- able: https://en.wikipedia.org/wiki/Adversarial_ machine_learning
-
[11]
Adversarial examples: Attacks and defenses for deep learning,
X. Yuan, P. He, Q. Zhu, and X. Li, "Adversarial examples: Attacks and defenses for deep learning," IEEE Transactions on Neural Networks and Learning Systems, vol. 30, no. 9, pp. 2805-2824, 2019
2019
-
[12]
Adversarial Examples - A Complete Characterisation of the Phenomenon
A. C. Serban, E. Poll, and J. Visser, "Adversarial examples - A complete characterisation of the phenomenon," arXiv preprint arXiv:1810.01185, 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[13]
Bagging predictors,
L. Breiman, "Bagging predictors," Machine Learning, vol. 24, no. 2, pp. 123-140, 1996
1996
-
[14]
The strength of weak learnability,
R. E. Schapire, "The strength of weak learnability," Machine Learning, vol. 5, no. 2, pp. 197-227, 1990
1990
-
[15]
Stacked generalization,
D. H. Wolpert, "Stacked generalization," Neural Networks, vol. 5, no. 2, pp. 241-259, 1992
1992
-
[16]
Are Transformers more robust than CNNs?
Y . Bai, J. Mei, A. L. Yuille, and C. Xie, "Are Transformers more robust than CNNs?" inProc. Advances in Neural Information Processing Systems (NeurIPS), vol. 34, pp. 26831–26843, 2021
2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.