Cuttlebot: a platform demonstration for complex, autonomous, bio-inspired swimmers
Pith reviewed 2026-06-28 22:10 UTC · model grok-4.3
The pith
The CORE platform integrates sensing and control for six dielectric elastomer actuators in an autonomous cuttlefish-inspired swimmer.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
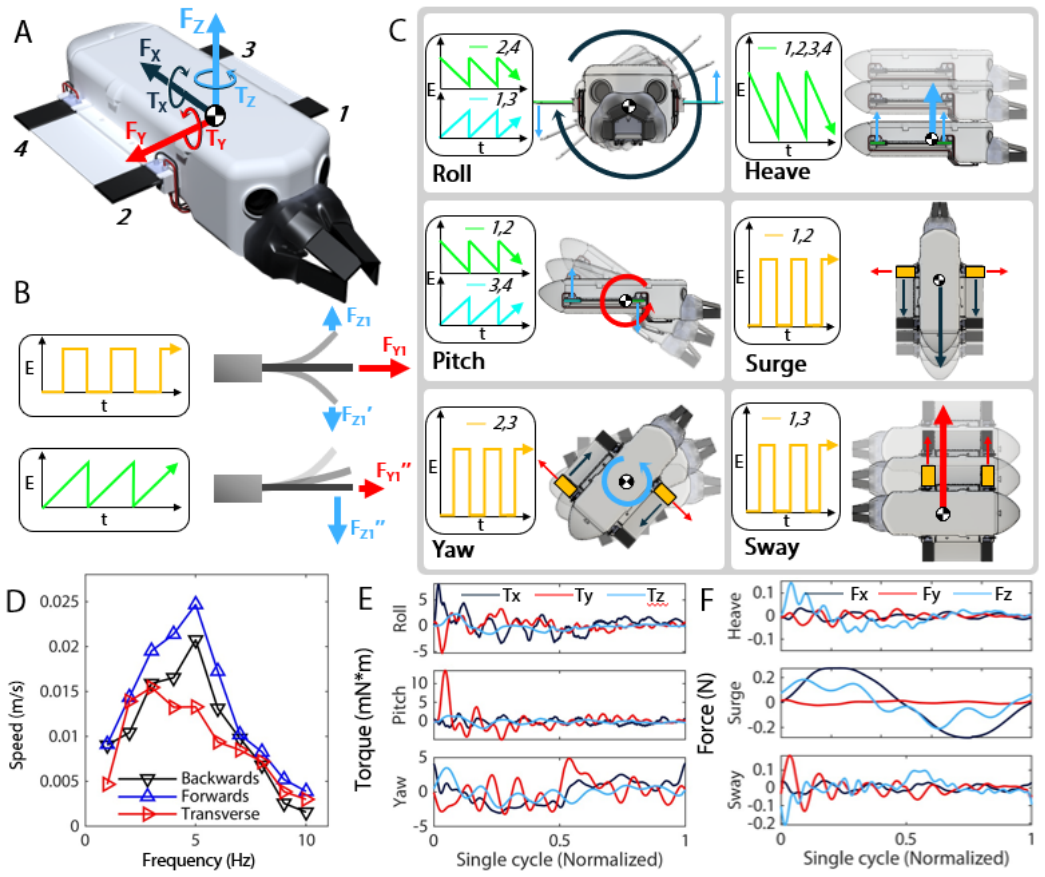
The CORE system drives six artificial muscles while sensing visual and spatial information, and it produces controllable force and torque in six axes by sending specialized control signals to the dielectric elastomer actuators, as shown by the Cuttlebot's swimming behavior.
What carries the argument
The CORE platform, which supplies drive signals and sensor feedback to multiple dielectric elastomer actuators in one integrated autonomous unit.
If this is right
- The Cuttlebot reaches 2.5 cm/s translation and 10 deg/s rotation using four primary fin muscles and a soft gripper.
- The platform supports both tethered and untethered swimming tests while maintaining six-axis control.
- The work supplies a concrete starting point for building more complex bio-inspired swimmers for ocean tasks.
Where Pith is reading between the lines
- The same integration approach could extend to other soft-actuator robots that must survive high pressure without rigid components.
- Adding onboard power and vision processing would remove the tether and allow fully independent operation in field conditions.
- The six-axis capability opens the possibility of combining locomotion with active manipulation in a single soft body.
Load-bearing premise
Dielectric elastomer actuators can be successfully integrated into a multi-muscle robotic system with autonomous sensing and control.
What would settle it
A demonstration in which the CORE system fails to produce measurable, controllable force or torque outputs in all six axes when driving the Cuttlebot's artificial muscles.
Figures
read the original abstract
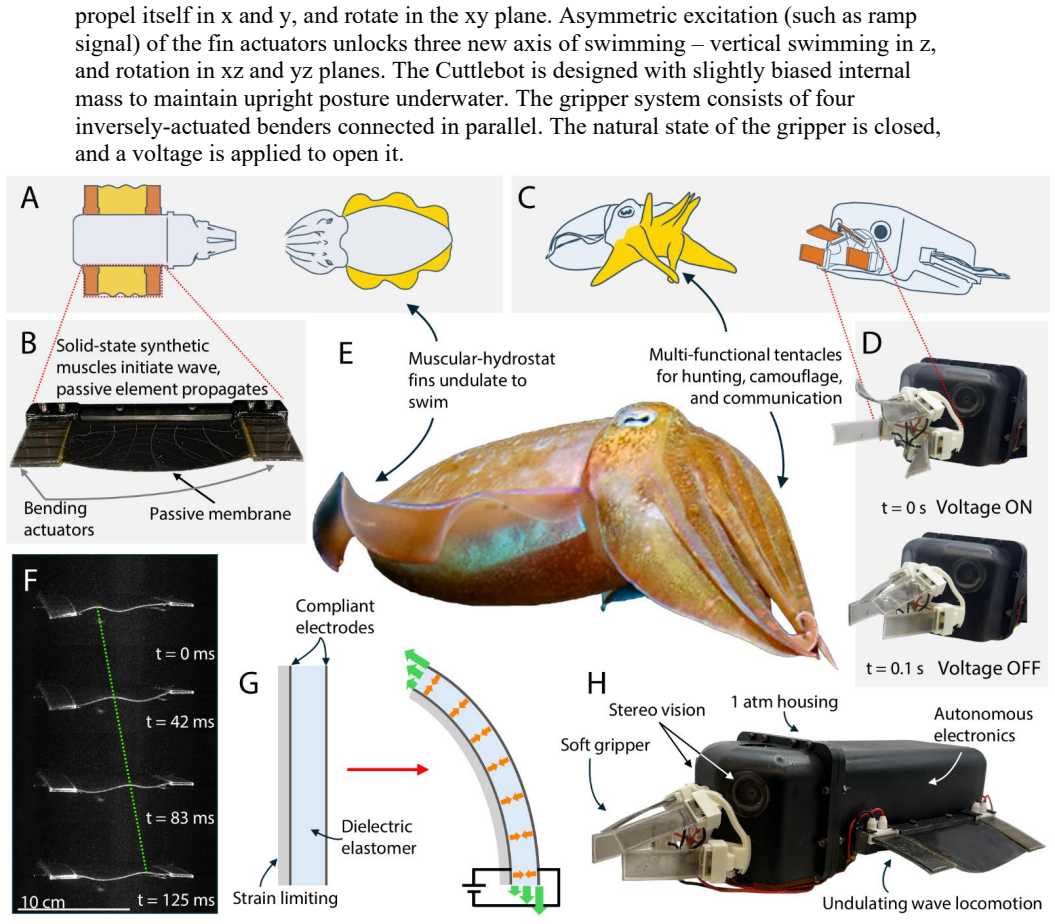
Increasing interest in deep-sea operations and resources motivates the development of ecologically sensitive but environmentally durable robots. Dielectric elastomer actuator artificial muscles are good candidates for powering such systems due to their pressure and temperature tolerance and soft makeup, but they are difficult to integrate with robotic systems. This work presents an autonomous robotic platform: the CORE, capable of driving six artificial muscles while sensing visual and spatial information. To validate the platform, we developed the Cuttlebot - a cuttlefish-inspired robot that swims in three dimensions using undulatory fin locomotion. The Cuttlebot has four primary artificial muscles in its fins in addition to a tentacle-inspired soft gripper. The robot was evaluated in a series of tethered and untethered swimming tests, demonstrating a top speed of 2.5 centimeters per second translation and 10 degrees per second rotation. Furthermore, the CORE system was capable of driving specialized control signals into the artificial muscles to controllably output force and torque in six axes. This work provides a platform for developing complex, bio-inspired swimming robots for ocean exploration and monitoring, laying the foundation with our leading example: the Cuttlebot.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents the CORE, an autonomous robotic platform designed to drive up to six dielectric elastomer actuator (DEA) artificial muscles while incorporating visual and spatial sensing. The platform is validated through the Cuttlebot, a cuttlefish-inspired swimmer employing four undulatory fin muscles plus a tentacle-like gripper. Tethered and untethered tests are reported to achieve a maximum translation speed of 2.5 cm/s and rotation rate of 10 deg/s. The central claim is that the CORE generates specialized control signals enabling controllable force and torque output across six axes, thereby providing a foundation for complex bio-inspired soft robots in ocean environments.
Significance. If the integration of multiple DEAs and the six-axis controllability claim are substantiated, the work would supply a reusable hardware platform addressing a recognized integration barrier for pressure- and temperature-tolerant soft actuators. The untethered swimming demonstration with bio-inspired locomotion adds a concrete engineering example to the soft-robotics literature on marine systems.
major comments (1)
- [Abstract] Abstract: The assertion that the CORE 'was capable of driving specialized control signals into the artificial muscles to controllably output force and torque in six axes' is not supported by the described validation. The reported results consist solely of net swimming performance (2.5 cm/s translation, 10 deg/s rotation) achieved with four fin muscles; no force/torque sensor data, per-axis characterization, or crosstalk measurements are provided to establish independent six-degree-of-freedom controllability.
minor comments (1)
- [Abstract] The abstract and validation description omit experimental methods, error bars, data exclusion criteria, and sensor specifications, which are required to evaluate the reliability of the reported speeds and control capabilities.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive feedback. We agree that the abstract claim regarding six-axis controllability exceeds what the validation data demonstrate and will revise the manuscript to correct this.
read point-by-point responses
-
Referee: [Abstract] Abstract: The assertion that the CORE 'was capable of driving specialized control signals into the artificial muscles to controllably output force and torque in six axes' is not supported by the described validation. The reported results consist solely of net swimming performance (2.5 cm/s translation, 10 deg/s rotation) achieved with four fin muscles; no force/torque sensor data, per-axis characterization, or crosstalk measurements are provided to establish independent six-degree-of-freedom controllability.
Authors: We concur that the abstract overstates the results. The experiments validate control of four fin muscles for net translation and rotation in swimming but provide no direct per-axis force/torque measurements, independent axis characterization, or crosstalk data to support independent six-DoF controllability. The platform hardware is designed to address up to six actuators, yet the Cuttlebot demonstration uses only four. We will revise the abstract (and any similar claims in the introduction or conclusion) to state only what the data support: successful driving of four specialized control signals for undulatory fin propulsion with the reported performance metrics. revision: yes
Circularity Check
No circularity: engineering demonstration paper with no derivations
full rationale
This is a hardware platform demonstration paper. The abstract and described content contain no equations, fitted parameters, predictions, or first-principles derivations. The central claim about six-axis force/torque output is presented as an experimental capability validated by swimming tests, without any reduction of outputs to inputs by construction, self-citation chains, or ansatz smuggling. No load-bearing steps exist that could exhibit circularity under the defined patterns. The paper is self-contained as a straightforward engineering report.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
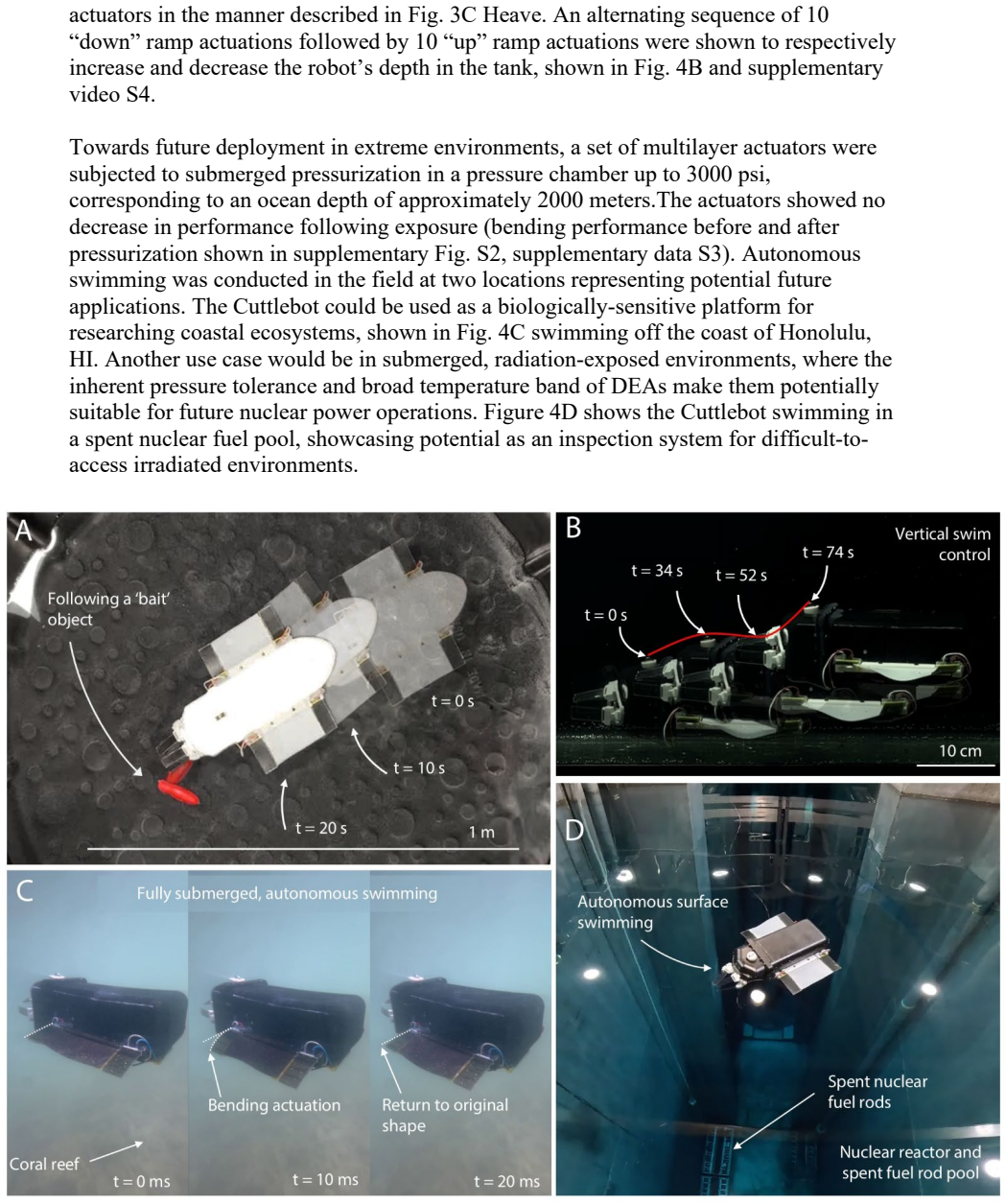
upward swim
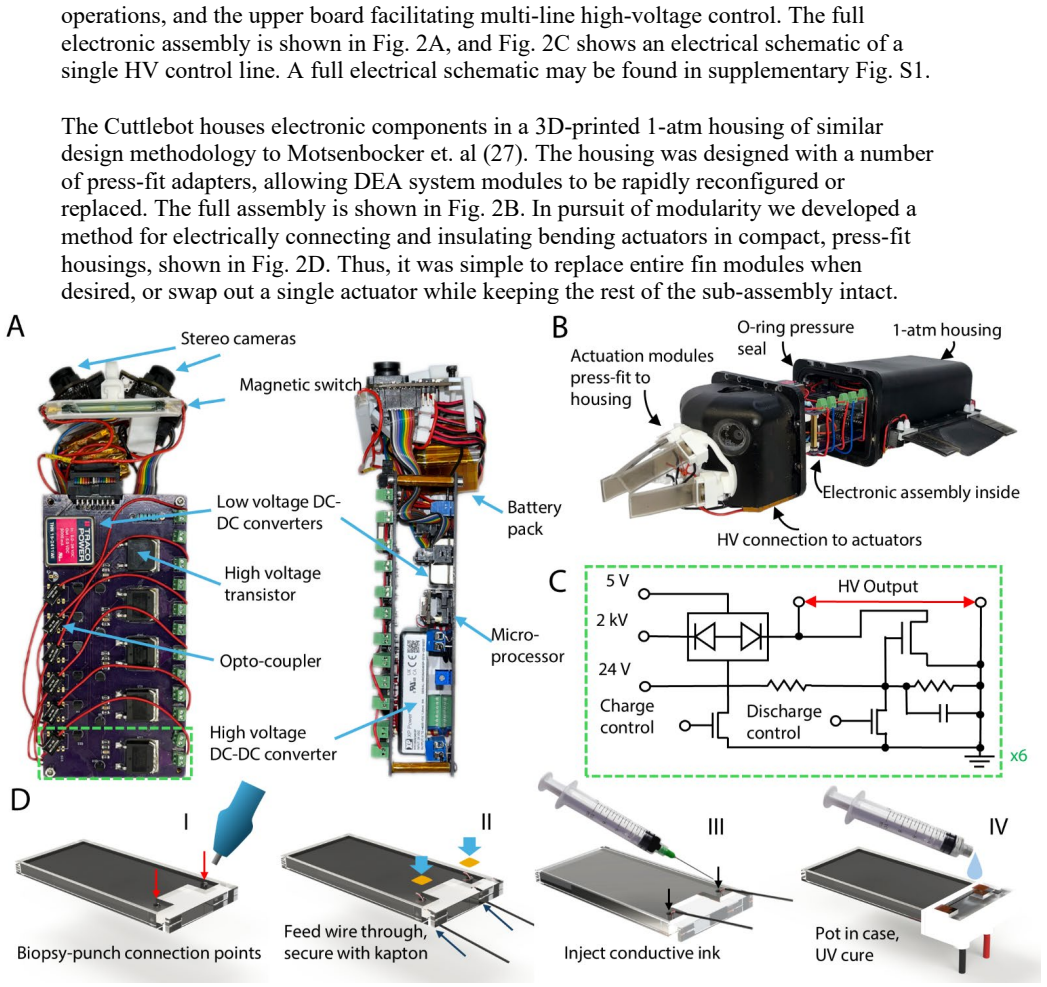
Devices were strain limited with a 12.5 μm mylar layer, and uni-axial bending was promoted by integrating carbon-fiber rods parallel to the bending axis into the strain limiter. Electrical connection points were made by hole-punch and infilled with a conductive fluid medium to interface with the wire connections. The devices were then integrated into 3D p...
-
[2]
D. O. B. Jones, M. B. Arias, L. V. Audenhaege, S. Blackbird, C. Boolukos, G. Bribiesca- Contreras; J. T. Copley, A. Dale, S. Evans, B. F. M. Fleming, A. R. Gates, H. Grant, M. G. J. Hartl, V. A. I. Huvenne, R. M. Jeffreys, P. Josso, L. D. King, E. Simon-Lledó, T. L. Bas, L. Norman, B. O’Malley, T. Peacock, T. Shimmield, E.V. D. Stewart, A. K. Sweetman, C....
-
[3]
G. Li, T. Wong, B. Shih, C. Guo, L. Wang, J. Liu, T. Wang, X. Liu, J. Yan, B. Wu, F. Yu, Y. Chen, Y. Liang, Y. Xue, C. Wang, S. He, L. Wen, M. T. Tolley, A. Zhang, C. Laschi, T. Li, Bioinspired soft robots for deep-sea exploration. nat. commun. 14, 7097 (2023). doi: 10.1038/s41467-023-42882-3
-
[4]
R. K. Katzschmann, A. D. Marchese, D. Rus, Hydraulic Autonomous Soft Robotic Fish for 3D Swimming, in Experimental Robotics, M. Hsieh, O. Khatib, V. Kumar, Eds. (Springer International Publishing, Cham, 2015)
2015
-
[5]
S. Wang, B. Huang, D. McCoul, M. Li, L. Mu, J. Zhao, A soft breaststroke-inspired swimming robot actuated by dielectric elastomers. Smart Mater. Struct. 28, 045006 (2019). doi: 10.1088/1361-665X/ab0a7a
-
[6]
Berlinger, M
F. Berlinger, M. Duduta, H. Gloria, D. Clarke, R. Nagpal, R. Wood, A Modular Dielectric Elastomer Actuator to Drive Miniature Autonomous Underwater Vehicles, in Proceedings of the 2018 IEEE International Conference on Robotics and Automation, 21 to 25 May 2018, Brisbane, QLD, Australia, pp. 3429-3435
2018
-
[7]
R. Wang, C. Zhang, Y. Zhang, W. Tan, W. Chen, L. Liu, Soft Underwater Swimming Robots Based on Artificial Muscle. Adv. Mater. Technol. 8, 2200962 (2023). doi: 10.1002/admt.202200962
-
[8]
M. Duduta, E. Hajiesmaili, H. Zhao, R. J. Wood, D. R. Clarke, Realizing the potential of dielectric elastomer artificial muscles. Proc. Natl. Acad. Sci. 116, 2476-2481 (2019). doi: 10.1073/pnas.1815053116
-
[9]
G. Li, X. Chen, F. Zhou, Y. Liang, Y. Xiao, X. Cao, Z. Zhang, M. Zhang, B. Wu, S. Yin, Y. Xu, H. Fan, Z. Chen, W. Song, W. Yang, B. Pan, J. Hou, W. Zhou, S. He, X. Yang, G. Mao, Z. Jia, H. Zhou, T. Li, S. Qu, Z. Xu, Z. Huang, Y. Luo, T. Xie, J. Gu, S. Zhu, W. Yang, Self-powered soft robot in the Mariana Trench. nature. 591, 66-71 (2021). doi: 10.1038/s415...
-
[10]
C. Tugui, T. Thakar, A. Gogoj, A. White, A. Li, A. Yin, E. Pomianek, M. Duduta, A Soft Robotic Demonstration in the Stratosphere. arXiv:2603.04352 [cs.RO] (2026)
Pith/arXiv arXiv 2026
-
[11]
Kier, The diversity of hydrostatic skeletons
W. Kier, The diversity of hydrostatic skeletons. J. Exp. Biol. 215, 1247-1257 (2012). doi: 10.1242/jeb.056549
-
[13]
R. Pelrine, R. Kornbluh, Q. Pei, J. Joseph, High-Speed Electrically Actuated Elastomers with Strain Greater Than 100%. Science. 287, 836-839 (2000). doi: 10.1126/science.287.5454.83
-
[14]
W. Feng, L. Sun, Z. Jin, L. Chen, Y. Liu, H. Xu, C. Wang, A large-strain and ultrahigh energy density dielectric elastomer for fast moving soft robot. Nature Communications. 15, 4222 (2024). doi: 10.1038/s41467-024-48243-y
-
[15]
Y. Shi, E. Askounis, R. Plamthottam, T. Libby, Z. Peng, K. Youssef, J. Pu, R. Pelrine, Q. Pei, A processable, high-performance dielectric elastomer and multilayering process. Science. 377, 228-232 (2022). doi: 10.1126/science.abn0099
-
[16]
W. Chu, K. Lee, S. Song, M. Han, J. Lee, H. Kim, M. Kim, Y. Park, K. Cho, S. Ahn, Review of biomimetic underwater robots using smart actuators. Int. J. Precis. Eng. Manuf. 24, 1281-1292 (2012). doi: 10.1007/s12541-012-0171-7 Page 14 of 19
-
[17]
J. Speregen, T. White, Liquid Crystalline Elastomers in Soft Robotics: Assessing Promise and Limitations. Advanced Robotics Research. Early View (2025) doi: 10.1002/adrr.202500150
-
[18]
T. Zang, J. Wang, G. Yan, X. Lu, J. Hu, H. Xia, Y. Zhao, State of the Art, Insights and Perspectives for Bio-Inspired Liquid Crystal Elastomer Soft Actuators. Advanced Materials. 37, e08694 (2025). doi: 10.1002/adma.202508694
-
[19]
F. Hartmann, M. Baskaran, G. Raynaud, M. Benbedda, K. Mulleners, H. Shea, Highly agile flat swimming robot. Sci. Robot. 10 eadr0721 (2025). doi: 10.1126/scirobotics.adr0721
-
[20]
G. Li, P. Shen, T. Wong, M. Liu, Z. Sun, X. Liu, Y. Chen, X. Wang, H. Zhang, B. Hu, D. Chen, Z. Zhang, C. Zhang, R. Wang, W. Zhang, S. Nie, X. Zhang, J. Wong, H. Zhou, W. Li, H. Wang, Q. Zhang, S. Wang, Z. Yu, H. Li, H. Zhao, Q. Zeng, S. Wang, Z. Huang, C. Ye, A. Zhang, T. Li, Plasticized electrohydraulic robot autopilots in the deep sea. Sci. Robot. 10 e...
-
[21]
Kier, The fin musculature of cuttlefish and squid (Mollusca, Cephalopoda): Morphology and mechanics
W. Kier, The fin musculature of cuttlefish and squid (Mollusca, Cephalopoda): Morphology and mechanics. Journal of Zoology. 217, 23-38 (1989). doi: 10.1111/j.1469- 7998.1989.tb02472.x
-
[22]
Kier, The Musculature of Coleoid Cephalopod Arms and Tentacles
W. Kier, The Musculature of Coleoid Cephalopod Arms and Tentacles. Front. Cell Dev. Biol. 4:10 (2016). doi: 10.3389/fcell.2016.00010
-
[23]
E. N. Shook, G. T. Barlow, D. Garcia-Rosales, C. J. Gibbons, T. G. Montague, Dynamic skin behaviors in cephalopods. Current Opinion in Neurobiology. 86:102876 (2024). doi: 10.1016/j.conb.2024.102876
-
[24]
G. J. Gemmell, J. O. Dabiri, S. P. Colin, J. H. Costello, J. P. Townsend, K. R. Sutherland, Cool your jets: biological jet propulsion in marine invertebrates. J Exp Biol. 224(12):jeb222083 (2021). doi: 10.1242/jeb.222083
-
[25]
E. J. Denton, 6 - The Buoyancy of Fish and Cephalopods. Progress in Biophysics and Biophysical Chemistry. 11, 177-234 (1961). doi: 10.1016/S0096-4174(18)30212-9
-
[26]
E. Arslan, K. Akça, A Design Methodology for Cuttlefish Shaped Amphibious Robot. European Journal of Science and Technology. Special Issue, 214-224 (2019). doi: 10.31590/ejosat.637838
-
[27]
Y. Wang, Z. Wang, J. Li, Initial Design of a Biomimetic Cuttlefish Robot Actuated by SMA Wires. 2011 Third International Conference on Measuring Technology and Mechatronics Automation, Shanghai, China (2011). doi: 10.1109/ICMTMA.2011.393
-
[28]
B. Motsenbocker, O. Mattyasovszky, S. Mayer, B. Phillips, A Design Guide for Manufacturing Deep-Sea Pressure Vessels with SLA 3D Printing, in OCEANS 2025 Brest (2025), Brest, France, pp. 1-7. doi: 10.1109/OCEANS58557.2025.11104294
-
[29]
H. Ko, V. Saro-Cortes, B. Mmari, D. Ni, A. Wissa, R. Nagpal, BlueGuppy: tunable kinematics enables maneuverability in a minimalist fish-like robot. Bioinspiration and Biomimetics. 20 056006 (2025). doi: 10.1088/1748-3190/adf2e9
-
[30]
B. Sun, Y. Ling, K. Wang, Q. Zhang, Y. Li, H. Wang, K. Li, C. Hou, All-in-One Luminescent Dielectric Elastomer Actuator Driven by a Single Electrical Stimulus with Large Out-of-Plant Actuation and Fast Response. Small. 19 e10346 (2026). doi: 10.1002/smll.202510346
-
[31]
I. A. Anderson, T. A. Gisby, T. G. McKay, B. M. O’Brien, E. P. Calius, Multi-functional dielectric elastomer artificial muscles for soft and smart machines. Journal of Applied Physics. 112, 041101 (2012). doi: 10.1063/1.4740023 Page 15 of 19
-
[32]
S. Gratz-Kelly, G. Rizzello, M. Fontana, S. Seelecke, G. Moretti, A Multi-Mode, Multi- Frequency Dielectric Elastomer Actuator. Adv. Funct. Mater. 32, 2201889 (2022). doi: 10.1002/adfm.202201889
-
[33]
D. Flores, S. Sandhu, A. White, A. Yin, A. L. Li, S. Kang, Y. Wang, L. P. Chamorro, M. Duduta, RoboNautilus: a cephalopod-inspired soft robotic siphon for underwater propulsion. npj robotics. 3, 17 (2025). doi: 10.1038/s44182-025-00035-2
-
[34]
Authors declare that they have no competing interests
R. Zhang, Z. Shen, H. Zhong, J. Tan, Y. Hu, Z. Wang, A Cephalopod-Inspired Soft- Robotic Siphon for Thrust Vectoring and Flow Rate Regulation. Soft Robotics. 8, 416-431 (2021). doi: 10.1089/soro.2019.0152 Acknowledgments: We wish to thank Dr. Brennan Phillips at the University of Rhode Island for providing us with lab access for high-pressure testing. We ...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.