Optimizing 3D Gaussian Splatting via Point Cloud Upsampling
Pith reviewed 2026-06-28 19:20 UTC · model grok-4.3
The pith
Point cloud upsampling strategies raise 3D Gaussian Splatting reconstruction quality on Mip-NeRF360 and Replica datasets.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
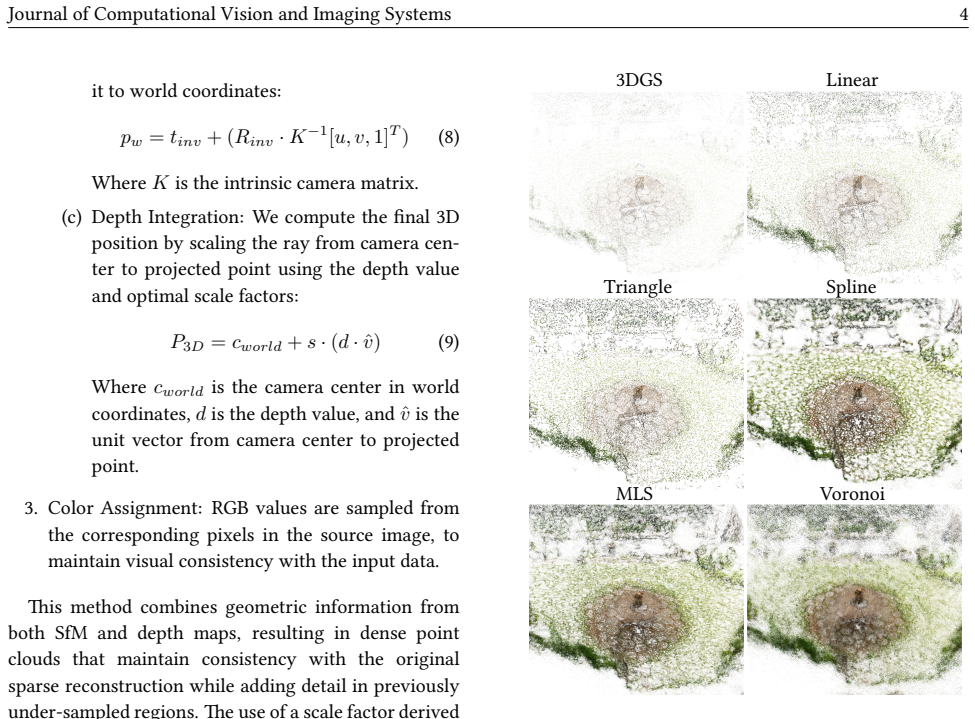
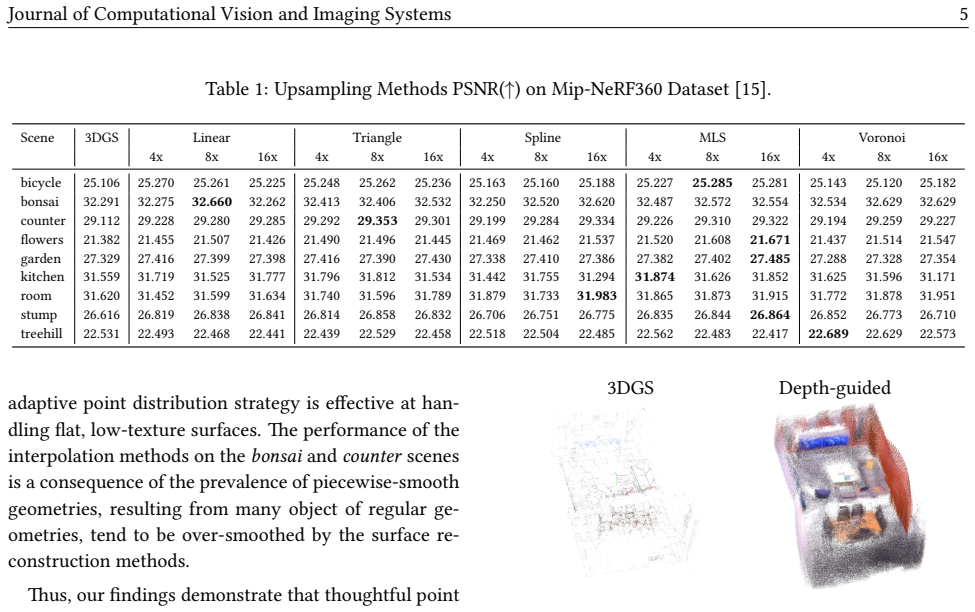
The paper claims that upsampling SfM-derived seed points via linear interpolation, triangular interpolation, spline-based surface reconstruction, moving least squares surface fitting, Voronoi-based generation, and depth-guided point lifting produces higher-quality 3D Gaussian Splatting reconstructions, with surface reconstruction methods favored for organic detailed scenes, simpler interpolation favored for piecewise-smooth geometries, and depth-guided lifting effective for adding geometry-aware points in texture-less regions.
What carries the argument
Depth-guided point lifting that uses depth maps to generate additional points while preserving consistency with the original Structure-from-Motion reconstruction.
If this is right
- Surface reconstruction methods perform better with organic, detailed scenes.
- Simpler interpolation approaches are more suited for scenes dominated by piecewise-smooth geometries.
- The depth-guided approach adds geometry-aware points across the entire scene, including texture-less regions.
- The findings supply preliminary practical guidelines for choosing an upsampling method based on scene characteristics and computational constraints.
Where Pith is reading between the lines
- The same upsampling choices could be tested on other point-based novel-view-synthesis pipelines to check whether the scene-type pattern holds.
- Depth-guided lifting might reduce the density needed from the initial SfM stage, lowering capture time or hardware requirements.
- The guidelines could be turned into an automatic selector that inspects scene statistics before choosing the upsampling strategy.
Load-bearing premise
That measured quality gains come from the upsampling itself and that the added points stay geometrically consistent with the original SfM points rather than from other unstated pipeline changes.
What would settle it
A side-by-side run of 3DGS with and without each upsampling method on the same SfM points, or a direct check that upsampled points deviate from the original SfM geometry by more than a small threshold.
Figures
read the original abstract
3D Gaussian Splatting (3DGS) is a technique for creating and rendering 3D scenes, however its performance depends heavily on the quality of initial seed points. To improve 3DGS initialization, this study presents and evaluates several point cloud upsampling approaches: linear interpolation, triangular interpolation, spline-based surface reconstruction, moving least squares surface fitting, and Voronoi-based point generation. Additionally, this research introduces a depth-guided point lifting method that leverages depth maps to maintain geometric consistency with Structure-from-Motion (SfM) reconstructions. Through extensive experiments on the Mip-NeRF360 and Replica datasets, the proposed methods demonstrate improvements in reconstruction quality across diverse scene types. Results indicate that different upsampling strategies excel in different scenarios: surface reconstruction methods perform better with organic, detailed scenes, while simpler interpolation approaches are more suited for scenes dominated by piecewise-smooth geometries. In comparison, the depth-guided approach shows promise for adding geometry-aware points across the entire scene, importantly in texture-less regions. These findings, which provide preliminary practical guidelines for selecting appropriate upsampling methods based on scene characteristics and computational constraints, advances the understanding of how point cloud initialization affects 3DGS quality.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes and evaluates multiple point cloud upsampling strategies (linear/triangular interpolation, spline-based reconstruction, moving least squares, Voronoi-based generation, and a new depth-guided lifting method) to improve the initial seed points for 3D Gaussian Splatting. Experiments on the Mip-NeRF360 and Replica datasets are reported to yield reconstruction quality gains, with the claim that different strategies are preferable for different scene types (surface methods for organic scenes, interpolation for piecewise-smooth geometries) and that depth-guided lifting helps in textureless regions.
Significance. If the attribution of gains to the upsampling methods can be isolated from other pipeline variables, the work would supply practical, scene-dependent heuristics for 3DGS initialization that could be adopted by practitioners working with SfM-derived point clouds.
major comments (2)
- [Abstract / Experiments] Abstract and Experiments: the central claim that the listed upsampling strategies produce the observed quality improvements requires that all other 3DGS pipeline elements (densification schedule, learning rates, Gaussian initialization code, optimization hyperparameters) remain identical once the point cloud is replaced. No description is given that such controls were enforced, so attribution to upsampling cannot be verified.
- [Abstract] Abstract: the assertion of 'improvements in reconstruction quality across diverse scene types' is presented without any quantitative metrics, baseline numbers, error bars, or statistical tests, rendering the magnitude and reliability of the claimed gains impossible to assess.
minor comments (1)
- [Abstract] Abstract, final sentence: subject-verb agreement error ('findings ... advances') should read 'advance'.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help clarify the presentation of our experimental methodology and results. We address each major comment below and will make the necessary revisions to the manuscript.
read point-by-point responses
-
Referee: [Abstract / Experiments] Abstract and Experiments: the central claim that the listed upsampling strategies produce the observed quality improvements requires that all other 3DGS pipeline elements (densification schedule, learning rates, Gaussian initialization code, optimization hyperparameters) remain identical once the point cloud is replaced. No description is given that such controls were enforced, so attribution to upsampling cannot be verified.
Authors: We agree that explicit confirmation of controlled variables is essential for attributing gains to the upsampling methods. In our experiments, the 3DGS implementation, densification schedule, learning rates, Gaussian initialization code, and all optimization hyperparameters were held fixed, with only the input point cloud varying. We acknowledge that this control was not described in the manuscript. We will revise the Experiments section to explicitly document these controls and confirm that the same codebase and settings were used throughout. revision: yes
-
Referee: [Abstract] Abstract: the assertion of 'improvements in reconstruction quality across diverse scene types' is presented without any quantitative metrics, baseline numbers, error bars, or statistical tests, rendering the magnitude and reliability of the claimed gains impossible to assess.
Authors: We agree that the abstract should provide quantitative support for the claims. While the full manuscript reports PSNR, SSIM, and LPIPS results on Mip-NeRF360 and Replica with baseline comparisons, the abstract summarizes these without numbers. We will revise the abstract to include key quantitative metrics (e.g., average improvements) and reference the variability across scene types, while directing readers to the detailed tables and any error bars or standard deviations in the Experiments section. revision: yes
Circularity Check
Empirical evaluation paper with no derivation chain
full rationale
The manuscript proposes and tests several point-cloud upsampling heuristics (linear/triangular interpolation, spline, MLS, Voronoi, depth-guided lifting) followed by standard 3DGS training. No equations, fitted parameters, or first-principles derivations are presented; all claims rest on direct experimental comparison against baselines on Mip-NeRF360 and Replica. No self-citation is invoked to justify uniqueness or to close a logical loop. The attribution of quality gains to the upsampling step is an empirical question that can be falsified by re-running the identical 3DGS pipeline, but that is a methodological concern rather than circularity in any derivation.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
3d gaussian splatting for real-time radiance field rendering,
B. Kerbl, G. Kopanas, T. Leimk ¨uhler, and G. Dret- takis, “3d gaussian splatting for real-time radiance field rendering, ”ACM Transactions on Graphics, vol. 42, no. 4, July 2023. [Online]. Available: https:// repo-sam.inria.fr/fungraph/3d-gaussian-splatting/
2023
-
[2]
Poison-splat: Computation cost attack on 3d gaussian splatting,
J. Lu, Y. Zhang, Q. Shen, X. Wang, and S. Yan, “Poison-splat: Computation cost attack on 3d gaussian splatting, ” 2024. [Online]. Available: https://arxiv.org/abs/2410.08190
-
[3]
Structure- from-motion revisited,
J. L. Sch ¨onberger and J.-M. Frahm, “Structure- from-motion revisited, ” inConference on Computer Vision and Pattern Recognition (CVPR), 2016
2016
-
[4]
Lidar-3dgs: Lidar reinforced 3d gaussian splatting for multimodal radiance field rendering,
H. Lim, H. Chang, J. B. Choi, and C. M. Yeum, “Lidar-3dgs: Lidar reinforced 3d gaussian splatting for multimodal radiance field rendering, ”
-
[5]
Available: https://arxiv.org/abs/ 2409.16296
[Online]. Available: https://arxiv.org/abs/ 2409.16296
-
[6]
Rgbd gs-icp slam,
S. Ha, J. Yeon, and H. Yu, “Rgbd gs-icp slam, ”
-
[7]
Available: https://arxiv.org/abs/ 2403.12550
[Online]. Available: https://arxiv.org/abs/ 2403.12550
-
[8]
Instantsplat: Unbounded sparse-view pose-free gaussian splatting in 40 sec- onds,
Z. Fan, W. Cong, K. Wen, K. Wang, J. Zhang, X. Ding, D. Xu, B. Ivanovic, M. Pavone, G. Pavlakos, Z. Wang, and Y. Wang, “Instantsplat: Unbounded sparse-view pose-free gaussian splatting in 40 sec- onds, ” 2024
2024
-
[9]
Dust3r: Geometric 3d vision made easy,
S. Wang, V. Leroy, Y. Cabon, B. Chidlovskii, and J. Revaud, “Dust3r: Geometric 3d vision made easy, ” 2024. [Online]. Available: https: //arxiv.org/abs/2312.14132
-
[10]
Point cloud densification for 3d gaussian splatting from sparse input views,
K.-C. Chan, J. Xiao, H. L. Goshu, and K.-M. Lam, “Point cloud densification for 3d gaussian splatting from sparse input views, ” inProceedings of the 32nd ACM International Conference on Multimedia, ser. MM ’24. New York, NY, USA: Association for Computing Machinery, 2024, p. 896–904. [Online]. Available: https://doi.org/10.1145/3664647.3681454
-
[11]
Dense 3D Gaussian Splatting Initialization for Sparse Image Data,
S. Seibt, T. V. S.-L. Chang, B. von Rymon Lipinski, and M. E. Latoschik, “Dense 3D Gaussian Splatting Initialization for Sparse Image Data, ” inEurograph- ics 2024 - Posters, L. Liu and M. Averkiou, Eds. The Eurographics Association, 2024
2024
-
[12]
To- wards real-time gaussian splatting: Accelerating 3dgs through photometric slam,
Y. S. Hu, D. Mao, Y. Chen, and J. Zelek, “To- wards real-time gaussian splatting: Accelerating 3dgs through photometric slam, ” 2024. [Online]. Available: https://arxiv.org/abs/2408.03825
-
[13]
Piegl and W
L. Piegl and W. Tiller,The NURBS book (2nd ed.), ser. Monographs in Visual Communication. Berlin, Heidelberg: Springer-Verlag, 1997, p. 100–110
1997
-
[14]
Approximate moving least- squares approximation: A fast and accurate multivariate approximation method,
G. E. Fasshauer, “Approximate moving least- squares approximation: A fast and accurate multivariate approximation method, ” inCurve and Surface Fitting, A. Cohen, J.-L. Merrien, and L. L. Schumaker, Eds. Saint-Malo 2002: Nashboro Press, 2003, pp. 139–148. [Online]. Available: https: //api.semanticscholar.org/CorpusID:10669315
2002
-
[15]
Surface reconstruction from points,
W. Y. Chang, “Surface reconstruction from points, ” UC San Diego, Department of Computer Science & Engineering, Technical Report CS2008-0922, may 2008, peer-Reviewed. [Online]. Available: https://escholarship.org/uc/item/9xv8x6n6
2008
-
[16]
Point cloud densification for 3d gaussian splatting from sparse input views,
K.-C. Chan, J. Xiao, H. L. Goshu, and K. man Lam, “Point cloud densification for 3d gaussian splatting from sparse input views, ” inACM Multimedia 2024, 2024. [Online]. Available: https: //openreview.net/forum?id=vW5070FoXi
2024
-
[17]
Mip-nerf 360: Unbounded anti-aliased neural radiance fields,
J. T. Barron, B. Mildenhall, D. Verbin, P. P. Srini- vasan, and P. Hedman, “Mip-nerf 360: Unbounded anti-aliased neural radiance fields, ”CVPR, 2022
2022
-
[18]
The Replica Dataset: A Digital Replica of Indoor Spaces
J. Straub, T. Whelan, L. Ma, Y. Chen, E. Wij- mans, S. Green, J. J. Engel, R. Mur-Artal, C. Ren, S. Verma, A. Clarkson, M. Yan, B. Budge, Y. Yan, X. Pan, J. Yon, Y. Zou, K. Leon, N. Carter, J. Briales, T. Gillingham, E. Mueggler, L. Pesqueira, M. Savva, D. Batra, H. M. Strasdat, R. D. Nardi, M. Goe- sele, S. Lovegrove, and R. Newcombe, “The Replica datase...
work page internal anchor Pith review Pith/arXiv arXiv 1906
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.