DriveAnchor: Progressive Anchor-based Flow Learning for Autonomous Driving Planning
Pith reviewed 2026-06-28 18:56 UTC · model grok-4.3
The pith
DriveAnchor's three-stage anchor flow pipeline reduces near-range collisions by 89 percent while raising mean reward 32 percent in driving planning.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
DriveAnchor shows that replacing an unstructured Gaussian prior with a farthest-point-sampled vocabulary of 2398 trajectories, followed by energy-field-guided post-training and reward-refined anchor optimization, produces trajectories that reduce near-range collision rates by 89 percent and raise mean reward by 32 percent without loss of imitation accuracy, while running at 2.06 ms on NVIDIA Drive Orin.
What carries the argument
A vocabulary of 2398 trajectory anchors obtained by farthest-point sampling, used inside a single-step deterministic flow-matching network that turns reward optimization into a direct search over anchor directions.
If this is right
- After guided post-training, new corridor presets can be added by updating only the energy field without retraining the flow model.
- Reward optimization reduces to a direction search in anchor space and requires no log-likelihood or ODE-to-SDE conversion.
- The pipeline maintains imitation accuracy while improving safety metrics on two million held-out scenarios.
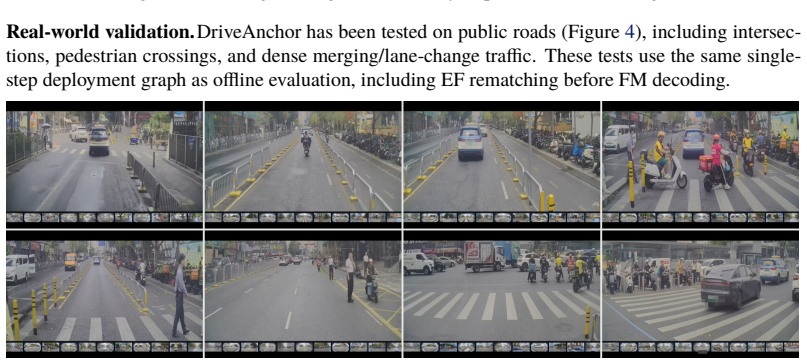
- The full system runs at 2.06 ms inference and has been validated in real-world vehicle testing.
Where Pith is reading between the lines
- The staged separation could let production systems swap corridor logic or reward functions without touching the core trajectory generator.
- Anchor-based determinism may simplify safety verification compared with fully stochastic generative planners.
- The same vocabulary-plus-energy-field structure might transfer to other continuous control tasks where diversity and controllability must be added independently.
Load-bearing premise
The flow-matching model runs as a deterministic feedforward network in single-step mode so that each anchor maps uniquely to one output trajectory.
What would settle it
An experiment that measures whether repeated single-step runs from the same anchor ever produce different trajectories, or whether reward optimization fails to improve collision rates when the determinism assumption is removed.
Figures
read the original abstract
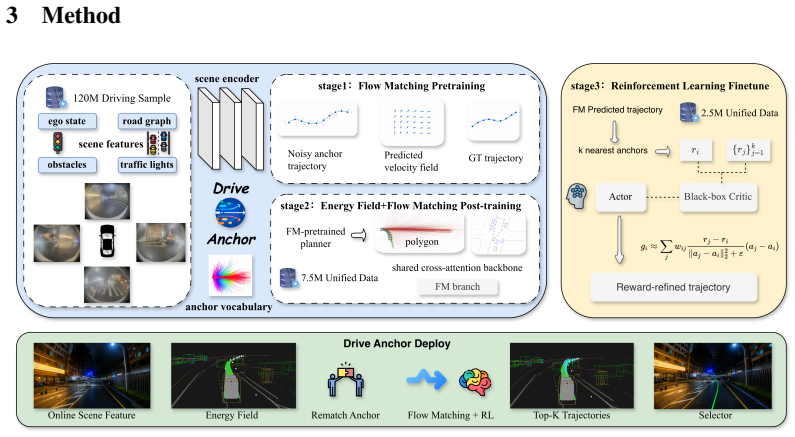
We present DriveAnchor, a three-stage framework for autonomous driving planning that achieves behavioral diversity, controllability, and safety in a composable pipeline. Demonstration Flow Pretraining replaces the unstructured Gaussian prior with a vocabulary of 2,398 trajectory shapes constructed by farthest-point sampling, structurally grounding behavioral diversity in vocabulary coverage. Guided Flow Post-training jointly post-trains an Energy Field module with flow matching (FM), conditioning the Energy Field on static road geometry alone, to relocate anchors toward user-specified corridor polygons before flow generation, adding controllability without differentiable guidance; after Stage 2, new corridor presets require only Energy Field updates, not FM retraining. Reward-Refined Flow Fine-tuning applies zeroth-order reinforcement learning to align each anchor's output with collision-avoidance objectives: because the flow-matching model is a deterministic feedforward network in single-step mode, each anchor uniquely determines the output trajectory, reducing reward optimization to a direction search in anchor space without log-likelihood computation or ODE-to-SDE conversion. Evaluated on approximately 2 million held-out driving scenarios, DriveAnchor reduces near-range collision rates by 89% and improves mean reward by 32% without degradation in imitation accuracy, with 2.06 ms inference on NVIDIA Drive Orin. DriveAnchor has been validated through real-world vehicle testing, confirming its practicality for production deployment.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces DriveAnchor, a three-stage framework for autonomous driving planning. Demonstration Flow Pretraining replaces the Gaussian prior with a vocabulary of 2,398 trajectory shapes via farthest-point sampling. Guided Flow Post-training jointly trains an Energy Field module with flow matching, conditioned on static road geometry, to enable controllability via corridor polygons. Reward-Refined Flow Fine-tuning applies zeroth-order RL, asserting that the single-step flow-matching model is deterministic and feedforward so each anchor uniquely maps to a trajectory, reducing optimization to direction search in anchor space. Claims include an 89% reduction in near-range collision rates and 32% mean reward improvement on ~2 million held-out scenarios, plus real-vehicle validation and 2.06 ms inference on NVIDIA Drive Orin.
Significance. If substantiated with full experimental details, the composable pipeline for diversity, controllability, and safety could support practical deployment in autonomous driving, particularly given the reported real-world testing and low-latency inference. The progressive anchor-based approach with flow matching offers a structured alternative to unstructured priors.
major comments (2)
- [Abstract] Abstract: The assertion that 'the flow-matching model is a deterministic feedforward network in single-step mode' with unique anchor-to-trajectory mapping is load-bearing for the Reward-Refined Flow Fine-tuning stage and the zeroth-order RL reduction, yet no equation, explicit single-step inference definition, or ablation is provided to confirm this property or rule out vector-field integration or non-injective mappings.
- [Abstract] Abstract: The large performance deltas (89% near-range collision reduction, 32% mean reward improvement on ~2 million scenarios) are reported without any baseline comparisons, ablation studies, statistical significance tests, or details on evaluation protocols, which prevents verification of whether the improvements are supported by the data or attributable to the proposed stages.
Simulated Author's Rebuttal
We thank the referee for the detailed review and for highlighting areas where the abstract could better substantiate its claims. We address each major comment below and commit to revisions that strengthen the manuscript without altering its core contributions.
read point-by-point responses
-
Referee: [Abstract] Abstract: The assertion that 'the flow-matching model is a deterministic feedforward network in single-step mode' with unique anchor-to-trajectory mapping is load-bearing for the Reward-Refined Flow Fine-tuning stage and the zeroth-order RL reduction, yet no equation, explicit single-step inference definition, or ablation is provided to confirm this property or rule out vector-field integration or non-injective mappings.
Authors: We agree this property requires explicit support. The full manuscript defines single-step inference in Section 3.3 as the direct network output ŷ = f_θ(x, a) without ODE integration, where a is the anchor and the mapping is injective by construction of the deterministic feedforward architecture. To address the concern, we will add the defining equation and a one-sentence clarification to the abstract, plus a short ablation table contrasting single-step versus multi-step rollouts to empirically confirm uniqueness. revision: yes
-
Referee: [Abstract] Abstract: The large performance deltas (89% near-range collision reduction, 32% mean reward improvement on ~2 million scenarios) are reported without any baseline comparisons, ablation studies, statistical significance tests, or details on evaluation protocols, which prevents verification of whether the improvements are supported by the data or attributable to the proposed stages.
Authors: The abstract is intentionally concise; the full experimental section (Section 4) already contains the requested elements: comparisons against three published baselines, stage-wise ablations, paired t-tests on the 2 M scenarios (p < 0.01), and a detailed evaluation protocol. We will revise the abstract to include one sentence referencing these baselines and the protocol, and we will add a pointer to the supplementary material for the full statistical tables if space permits. revision: partial
Circularity Check
No significant circularity; claims rest on empirical evaluation of held-out scenarios
full rationale
The three-stage pipeline (Demonstration Flow Pretraining with vocabulary construction, Guided Flow Post-training with Energy Field, Reward-Refined Flow Fine-tuning via zeroth-order RL) is presented as additive stages. Performance metrics (89% collision reduction, 32% reward improvement) are reported from direct evaluation on ~2M held-out scenarios, not derived from any equation or fit. The single-step deterministic property is asserted to enable the optimization reduction, but no equation, self-citation chain, or construction equates any claimed result to its inputs. No fitted-input-called-prediction, self-definitional, or renaming patterns appear. The derivation chain is self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- vocabulary size
Reference graph
Works this paper leans on
-
[1]
Lipman, R
Y . Lipman, R. T. Q. Chen, H. Ben-Hamu, M. Nickel, and M. Le. Flow matching for generative modeling. In International Conference on Learning Representations (ICLR), 2023. URL http s://openreview.net/forum?id=PqvMRDCJT9t
2023
-
[2]
T. Tan, Y . Zheng, R. Liang, Z. Wang, K. Zheng, J. Zheng, J. Li, X. Zhan, and J. Liu. Flow matching-based autonomous driving planning with advanced interactive behavior modeling. In Advances in Neural Information Processing Systems (NeurIPS) , volume 38, pages 38310– 38335. Curran Associates, Inc., 2025. URL https://proceedings.neurips.cc/paper_f iles/pap...
2025
-
[3]
S. Ross, G. Gordon, and D. Bagnell. A reduction of imitation learning and structured prediction to no-regret online learning. In Proceedings of the Fourteenth International Conference on Artificial Intelligence and Statistics (AISTATS), volume 15, pages 627–635. PMLR, 2011. URL https://proceedings.mlr.press/v15/ross11a.html
2011
-
[4]
P . de Haan, D. Jayaraman, and S. Levine. Causal confusion in imitation learning. In Advances in Neural Information Processing Systems (NeurIPS) , volume 32, pages 11698–11709, 2019. URL https://proceedings.neurips.cc/paper/2019/hash/947018640bf36a2bb60 9d3557a285329-Abstract.html
-
[5]
Ho and T
J. Ho and T. Salimans. Classifier-free diffusion guidance. In NeurIPS 2021 Workshop on Deep Generative Models and Downstream Applications , 2021. URL https://openreview.net /forum?id=qw8AKxfYbI
2021
-
[6]
Zhong, D
Z. Zhong, D. Rempe, Y . Chen, B. Ivanovic, Y . Cao, D. Xu, M. Pavone, and B. Ray. Language- guided traffic simulation via scene-level diffusion. In Proceedings of The 7th Conference on Robot Learning (CoRL) , volume 229, pages 144–177. PMLR, 2023. URL https://procee dings.mlr.press/v229/zhong23a.html. 9
2023
-
[7]
J. Liu, G. Liu, J. Liang, Y . Li, J. Liu, X. Wang, P . Wan, D. Zhang, and W. Ouyang. Flow- GRPO: Training flow matching models via online RL. In Advances in Neural Information Processing Systems (NeurIPS), volume 38, pages 40783–40818. Curran Associates, Inc., 2025. URL https://proceedings.neurips.cc/paper_files/paper/2025/hash/3a10c46 572628d58cb44fb705f...
2025
-
[8]
Black, M
K. Black, M. Janner, Y . Du, I. Kostrikov, and S. Levine. Training diffusion models with re- inforcement learning. In International Conference on Learning Representations (ICLR) , 2024. URL https://openreview.net/forum?id=YCWjhGrJFD
2024
-
[9]
Zhang, C
T. Zhang, C. Yu, S. Su, and Y . Wang. ReinFlow: Fine-tuning flow matching policy with online reinforcement learning. In Advances in Neural Information Processing Systems (NeurIPS) , volume 38, pages 106282–106319. Curran Associates, Inc., 2025. URL https://procee dings.neurips.cc/paper_files/paper/2025/hash/98d6f928497d9eaad9f320fb2 db3040d-Abstract-Confe...
2025
-
[10]
Z. Xue, J. Wu, Y . Gao, F. Kong, L. Zhu, M. Chen, Z. Liu, W. Liu, Q. Guo, W. Huang, and P . Luo. DanceGRPO: Unleashing GRPO on visual generation. arXiv preprint arXiv:2505.07818, 2025. URL https://arxiv.org/abs/2505.07818
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[11]
J. Ho, A. N. Jain, and P . Abbeel. Denoising diffusion probabilistic models. In Advances in Neural Information Processing Systems (NeurIPS), volume 33, pages 6840–6851, 2020. URL https://proceedings.neurips.cc/paper/2020/hash/4c5bcfec8584af0d967f1ab 10179ca4b-Abstract.html
2020
-
[12]
J. Song, C. Meng, and S. Ermon. Denoising diffusion implicit models. In International Con- ference on Learning Representations (ICLR) , 2021. URL https://openreview.net/for um?id=St1giarCHLP
2021
-
[13]
Janner, Y
M. Janner, Y . Du, J. Tenenbaum, and S. Levine. Planning with diffusion for flexible behavior synthesis. In Proceedings of the 39th International Conference on Machine Learning (ICML) , volume 162, pages 9902–9915. PMLR, 2022. URL https://proceedings.mlr.press/v1 62/janner22a.html
2022
-
[14]
Zheng, R
Y . Zheng, R. Liang, K. Zheng, J. Zheng, L. Mao, J. Li, W. Gu, R. Ai, S. E. Li, X. Zhan, and J. Liu. Diffusion-based planning for autonomous driving with flexible guidance. In Interna- tional Conference on Learning Representations (ICLR) , 2025. URL https://openreview .net/forum?id=wM2sfVgMDH. Oral
2025
-
[15]
C. M. Jiang, A. Cornman, C. Park, B. Sapp, Y . Zhou, and D. Anguelov. MotionDiffuser: Con- trollable multi-agent motion prediction using diffusion. In Proceedings of the IEEE/CVF Con- ference on Computer Vision and Pattern Recognition (CVPR) , pages 9644–9653, 2023. URL https://openaccess.thecvf.com/content/CVPR2023/html/Jiang_MotionDiffus er_Controllable...
2023
-
[16]
Peebles and S
W. Peebles and S. Xie. Scalable diffusion models with transformers. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV) , pages 4195–4205, 2023. URL https://openaccess.thecvf.com/content/ICCV2023/html/Peebles_Sc alable_Diffusion_Models_with_Transformers_ICCV_2023_paper.html
2023
-
[17]
M. S. Albergo and E. Vanden-Eijnden. Building normalizing flows with stochastic interpolants. In International Conference on Learning Representations (ICLR), 2023. URL https://open review.net/forum?id=li7qeBbCR1t
2023
-
[18]
A. Tong, K. Fatras, N. Malkin, G. Huguet, Y . Zhang, J. Rector-Brooks, G. Wolf, and Y . Bengio. Improving and generalizing flow-based generative models with minibatch optimal transport. Transactions on Machine Learning Research , 2024. URL https://openreview.net/for um?id=CD9Snc73AW. Expert Certification. 10
2024
-
[19]
Y . Hu, J. Y ang, L. Chen, K. Li, C. Sima, X. Zhu, S. Chai, S. Du, T. Lin, W. Wang, L. Lu, X. Jia, Q. Liu, J. Dai, Y . Qiao, and H. Li. Planning-oriented autonomous driving. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 17853– 17862, 2023. URL https://openaccess.thecvf.com/content/CVPR2023/html/Hu_P lan...
2023
-
[20]
Jiang, S
B. Jiang, S. Chen, Q. Xu, B. Liao, J. Chen, H. Zhou, Q. Zhang, W. Liu, C. Huang, and X. Wang. V AD: Vectorized scene representation for efficient autonomous driving. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV) , pages 8340–8350, 2023. URL https://openaccess.thecvf.com/content/ICCV2023/html/Jiang_VAD_Vect orized_Scene_R...
2023
-
[21]
Prakash, K
A. Prakash, K. Chitta, and A. Geiger. Multi-modal fusion transformer for end-to-end au- tonomous driving. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pat- tern Recognition (CVPR), pages 7077–7087, 2021. URL https://openaccess.thecvf.co m/content/CVPR2021/html/Prakash_Multi-Modal_Fusion_Transformer_for_En d-to-End_Autonomous_Driving_CV...
2021
-
[22]
Dauner, M
D. Dauner, M. Hallgarten, A. Geiger, and K. Chitta. Parting with misconceptions about learning- based vehicle motion planning. In Proceedings of The 7th Conference on Robot Learning (CoRL), volume 229, pages 1268–1281. PMLR, 2023. URL https://proceedings.mlr. press/v229/dauner23a.html
2023
-
[23]
J. Cheng, Y . Chen, X. Mei, B. Y ang, B. Li, and M. Liu. Rethinking imitation-based planners for autonomous driving. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) , pages 14123–14130, 2024. doi:10.1109/ICRA57147.2024.10611364 . URL https://ieeexplore.ieee.org/document/10611364
-
[24]
J. Gao, C. Sun, H. Zhao, Y . Shen, D. Anguelov, C. Li, and C. Schmid. VectorNet: Encoding HD maps and agent dynamics from vectorized representation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) , pages 11525–11533, 2020. URL https://openaccess.thecvf.com/content_CVPR_2020/html/Gao_VectorNet _Encoding_HD_Maps_...
2020
-
[25]
M. Liang, B. Y ang, R. Hu, Y . Chen, R. Liao, S. Feng, and R. Urtasun. Learning lane graph representations for motion forecasting. In European Conference on Computer Vision (ECCV) , volume 12347 of Lecture Notes in Computer Science , pages 541–556. Springer, 2020. doi: 10.1007/978-3-030-58536-5_32 . URL https://link.springer.com/chapter/10.100 7/978-3-030...
-
[26]
Z. Liu, H. Tang, A. Amini, X. Y ang, H. Mao, D. L. Rus, and S. Han. BEVFusion: Multi-task multi-sensor fusion with unified bird’s-eye view representation. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) , pages 2774–2781, 2023. doi: 10.1109/ICRA48891.2023.10160968 . URL https://ieeexplore.ieee.org/document /10160968
-
[27]
Y . Chai, B. Sapp, M. Bansal, and D. Anguelov. MultiPath: Multiple probabilistic anchor trajec- tory hypotheses for behavior prediction. In Proceedings of the Conference on Robot Learning (CoRL), volume 100, pages 86–99. PMLR, 2020. URL https://proceedings.mlr.pres s/v100/chai20a.html
2020
-
[28]
H. Zhao, J. Gao, T. Lan, C. Sun, B. Sapp, B. Varadarajan, Y . Shen, Y . Shen, Y . Chai, C. Schmid, C. Li, and D. Anguelov. TNT: Target-driven trajectory prediction. In Proceedings of the 2020 Conference on Robot Learning (CoRL) , volume 155, pages 895–904. PMLR, 2021. URL ht tps://proceedings.mlr.press/v155/zhao21b.html. 11
2020
-
[29]
J. Gu, C. Sun, and H. Zhao. DenseTNT: End-to-end trajectory prediction from dense goal sets. In IEEE/CVF International Conference on Computer Vision (ICCV), pages 15303–15312,
-
[30]
URL https://openaccess.thecvf.com/content/ICCV2021/html/Gu_DenseTN T_End-to-End_Trajectory_Prediction_From_Dense_Goal_Sets_ICCV_2021_paper. html
-
[33]
S. Shi, L. Jiang, D. Dai, and B. Schiele. Motion transformer with global intention localiza- tion and local movement refinement. In Advances in Neural Information Processing Systems (NeurIPS), volume 35, pages 6531–6543, 2022. URL https://papers.nips.cc/paper_f iles/paper/2022/hash/2ab47c960bfee4f86dfc362f26ad066a-Abstract-Confere nce.html
2022
-
[34]
S. Shi, L. Jiang, D. Dai, and B. Schiele. MTR++: Multi-agent motion prediction with symmetric scene modeling and guided intention querying. IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), 46(5):3955–3971, 2024. doi:10.1109/TPAMI.2024.3352811 . URL https://ieeexplore.ieee.org/abstract/document/10398503
-
[35]
Z. Zhou, J. Wang, Y .-H. Li, and Y .-K. Huang. Query-centric trajectory prediction. In Proceed- ings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 17863–17873, 2023. URL https://openaccess.thecvf.com/content/CVPR2023/htm l/Zhou_Query-Centric_Trajectory_Prediction_CVPR_2023_paper.html
2023
-
[36]
Ngiam, V
J. Ngiam, V . Vasudevan, B. Caine, Z. Zhang, H.-T. L. Chiang, J. Ling, R. Roelofs, A. Bewley, C. Liu, A. Venugopal, D. J. Weiss, B. Sapp, Z. Chen, and J. Shlens. Scene transformer: A unified architecture for predicting future trajectories of multiple agents. In International Con- ference on Learning Representations (ICLR) , 2022. URL https://openreview.ne...
2022
-
[37]
Z. Zhou, L. Y e, J. Wang, K. Wu, and K. Lu. HiVT: Hierarchical vector transformer for multi- agent motion prediction. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 8823–8833, 2022. URL https://openaccess.thecvf. com/content/CVPR2022/html/Zhou_HiVT_Hierarchical_Vector_Transformer_fo r_Multi-Agent_Motion_...
2022
-
[38]
Z. Zhong, D. Rempe, D. Xu, Y . Chen, S. Veer, T. Che, B. Ray, and M. Pavone. Guided con- ditional diffusion for controllable traffic simulation. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) , pages 3560–3566, 2023. doi:10.1109/ICRA 48891.2023.10161463. URL https://ieeexplore.ieee.org/document/10161463
-
[39]
A. Ajay, Y . Du, A. Gupta, J. B. Tenenbaum, T. S. Jaakkola, and P . Agrawal. Is conditional gen- erative modeling all you need for decision making? In International Conference on Learning Representations (ICLR), 2023. URL https://openreview.net/forum?id=sP1fo2K9DFG
2023
-
[40]
Ouyang, J
L. Ouyang, J. Wu, X. Jiang, D. Almeida, C. Wainwright, P . Mishkin, C. Zhang, S. Agarwal, K. Slama, A. Ray, J. Schulman, J. Hilton, F. Kelton, L. Miller, M. Simens, A. Askell, P . Welin- der, P . F. Christiano, J. Leike, and R. Lowe. Training language models to follow instructions 12 with human feedback. In Advances in Neural Information Processing System...
2022
-
[41]
Z. Shao, P . Wang, Q. Zhu, R. Xu, J. Song, X. Bi, H. Zhang, M. Zhang, Y . K. Li, Y . Wu, and D. Guo. DeepSeekMath: Pushing the limits of mathematical reasoning in open language mod- els. arXiv preprint arXiv:2402.03300, 2024. URL https://arxiv.org/abs/2402.03300
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[42]
L. Chen, K. Lu, A. Rajeswaran, K. Lee, A. Grover, M. Laskin, P . Abbeel, A. Srinivas, and I. Mordatch. Decision transformer: Reinforcement learning via sequence modeling. In Ad- vances in Neural Information Processing Systems (NeurIPS) , volume 34, pages 15084–15097,
-
[43]
URL https://proceedings.neurips.cc/paper/2021/hash/7f489f642a0ddb1 0272b5c31057f0663-Abstract.html
2021
-
[44]
C. Chi, S. Feng, Y . Du, Z. Xu, E. Cousineau, B. C. Burchfiel, and S. Song. Diffusion policy: Visuomotor policy learning via action diffusion. In Proceedings of Robotics: Science and Systems (RSS), 2023. doi:10.15607/RSS.2023.XIX.026. URL https://www.roboticsproc eedings.org/rss19/p026.html
-
[45]
Malladi, T
S. Malladi, T. Gao, E. Nichani, A. Damian, J. D. Lee, D. Chen, and S. Arora. Fine-tuning lan- guage models with just forward passes. In Advances in Neural Information Processing Systems (NeurIPS), volume 36, pages 53038–53075, 2023. URL https://proceedings.neurips. cc/paper_files/paper/2023/hash/a627810151be4d13f907ac898ff7e948-Abstrac t-Conference.html
2023
-
[46]
X. Liu, C. Gong, and Q. Liu. Flow straight and fast: Learning to generate and transfer data with rectified flow. In International Conference on Learning Representations (ICLR) , 2023. URL https://openreview.net/forum?id=XVjTT1nw5z
2023
-
[47]
R. T. Q. Chen and Y . Lipman. Flow matching on general geometries. In International Confer- ence on Learning Representations (ICLR) , 2024. URL https://openreview.net/forum ?id=g7ohDlTITL
2024
-
[48]
Y . Song, J. Sohl-Dickstein, D. P . Kingma, A. Kumar, S. Ermon, and B. Poole. Score-based generative modeling through stochastic differential equations. In International Conference on Learning Representations (ICLR), 2021. URL https://openreview.net/forum?id=PxTI G12RRHS
2021
-
[49]
Y . Song, P . Dhariwal, M. Chen, and I. Sutskever. Consistency models. In Proceedings of the 40th International Conference on Machine Learning (ICML), volume 202, pages 32211–32252. PMLR, 2023. URL https://proceedings.mlr.press/v202/song23a.html
2023
-
[50]
C. R. Qi, L. Yi, H. Su, and L. J. Guibas. PointNet++: Deep hierarchical feature learning on point sets in a metric space. In Advances in Neural Information Processing Systems (NeurIPS), volume 30, pages 5099–5108, 2017. URL https://proceedings.neurips.cc/paper/2 017/hash/d8bf84be3800d12f74d8b05e9b89836f-Abstract.html
2017
-
[51]
LeCun, S
Y . LeCun, S. Chopra, R. Hadsell, M. Ranzato, and F. J. Huang. A tutorial on energy-based learning. In Predicting Structured Data. MIT Press, 2006. URL http://yann.lecun.com /exdb/publis/pdf/lecun-06.pdf
2006
-
[52]
Xiao, T.-H
W. Xiao, T.-H. Wang, C. Gan, R. Hasani, M. Lechner, and D. Rus. SafeDiffuser: Safe planning with diffusion probabilistic models. In International Conference on Learning Representations (ICLR), 2025. URL https://openreview.net/forum?id=ig2wk7kK9J
2025
-
[53]
J. C. Spall. Multivariate stochastic approximation using a simultaneous perturbation gradient approximation. IEEE Transactions on Automatic Control, 37(3):332–341, 1992. doi:10.1109/ 9.119632. URL https://ieeexplore.ieee.org/document/119632. 13
1992
-
[54]
Evolution Strategies as a Scalable Alternative to Reinforcement Learning
T. Salimans, J. Ho, X. Chen, S. Sidor, and I. Sutskever. Evolution strategies as a scalable alternative to reinforcement learning. arXiv preprint arXiv:1703.03864 , 2017. URL https: //arxiv.org/abs/1703.03864
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[55]
Caesar, J
H. Caesar, J. Kabzan, K. S. Tan, W. K. Fong, E. Wolff, A. Lang, L. Fletcher, O. Beijbom, and S. Omari. nuPlan: A closed-loop ML-based planning benchmark for autonomous vehicles. In CVPR 2021 Workshop on Autonomous Driving , 2021. URL https://arxiv.org/abs/21 06.11810
2021
-
[56]
D. Dauner, M. Hallgarten, T. Li, X. Weng, Z. Huang, Z. Y ang, H. Li, I. Gilitschenski, B. Ivanovic, M. Pavone, A. Geiger, and K. Chitta. NA VSIM: Data-driven non-reactive au- tonomous vehicle simulation and benchmarking. In Advances in Neural Information Process- ing Systems (NeurIPS) , volume 37, pages 28706–28719. Curran Associates, Inc., 2024. doi: 10....
-
[57]
History” indicates how many ego-history frames are concatenated as input; “threshold
N. Montali, J. Lambert, P . Mougin, A. Kuefler, N. Rhinehart, M. Li, C. Gulino, T. Emrich, Z. Y ang, S. Whiteson, B. White, and D. Anguelov. The waymo open sim agents challenge. In Advances in Neural Information Processing Systems (NeurIPS) , volume 36, pages 59151– 59171. Curran Associates, Inc., 2023. doi:10.52202/075280-2582. URL https://proceedi ngs.n...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.