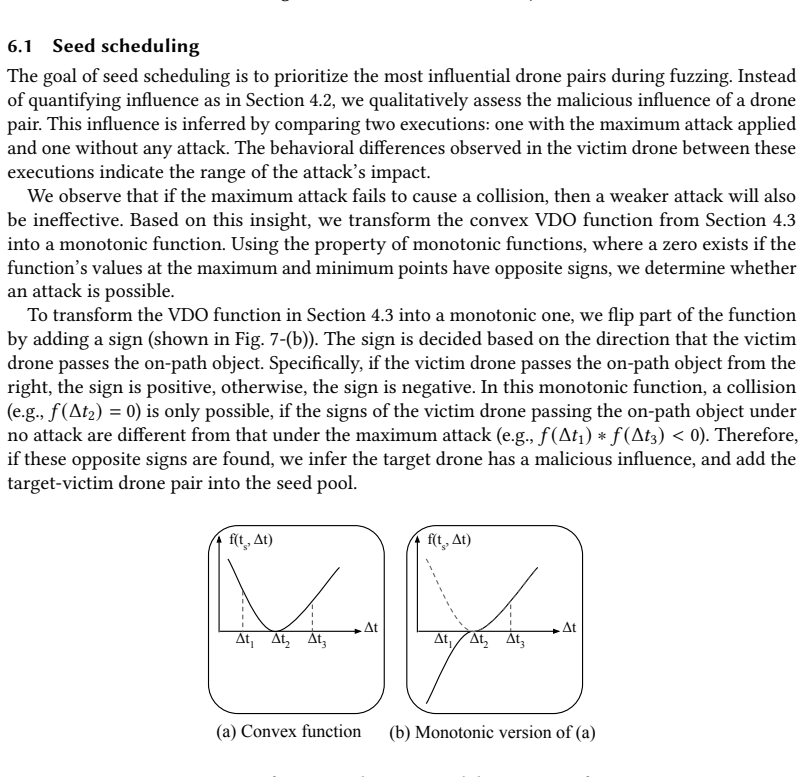
Framework for Discovering GPS Spoofing Attacks in Drone Swarms
Pith reviewed 2026-06-28 18:21 UTC · model grok-4.3
The pith
GPS spoofing on one drone can propagate through control algorithms to cause collisions among others in a swarm.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The authors claim that an attacker can target a swarm member through GPS spoofing attacks and indirectly cause other swarm members to veer from their course, resulting in collisions. They term these Swarm Propagation Vulnerabilities (SPVs) and show that two new fuzzing tools, SwarmFuzzGraph and SwarmFuzzBinary, can efficiently locate them in swarm control algorithms, with the second tool working across different swarm topologies.
What carries the argument
Swarm Propagation Vulnerabilities (SPVs): the exploitable weaknesses in swarm control algorithms that let GPS spoofing effects on a target drone propagate to alter the paths of other drones.
Load-bearing premise
The tested swarm control algorithms contain exploitable SPVs that the proposed fuzzing tools can reliably surface in a manner representative of real-world attacks.
What would settle it
A physical test in which GPS spoofing is applied to one drone in a live swarm and no other drones deviate or collide, or the tools failing to detect a known propagation path in a controlled simulation.
Figures

read the original abstract
Swarm robotics, particularly drone swarms, are used in various safety-critical tasks. While a lot of attention has been given to improving swarm control algorithms for improved intelligence, the security implications of various design choices in swarm control algorithms have not been studied. We highlight how an attacker can exploit the vulnerabilities in swarm control algorithms to disrupt drone swarms. Specifically, we show that the attacker can target a swarm member (target drone) through GPS spoofing attacks, and indirectly cause other swarm members (victim drones) to veer from their course, resulting in collisions. We call these Swarm Propagation Vulnerabilities (SPVs). In this paper, we introduce two fuzzing tools, SwarmFuzzGraph and SwarmFuzzBinary, to efficiently find SPVs in swarm control algorithms. SwarmFuzzGraph uses a combination of graph theory and gradient-guided optimization to find SPVs. Our evaluation on a popular swarm control algorithm shows that SwarmFuzzGraph achieves an average success rate of 48.8% in finding SPVs. However, SwarmFuzzGraph fails to find any SPVs in drone swarms with different topologies. We then propose SwarmFuzzBinary, which uses observation-based seed scheduling and binary search to find SPVs. The evaluation shows that SwarmFuzzBinary's success rate is comparable to SwarmFuzzGraph and work in all tested algorithms.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
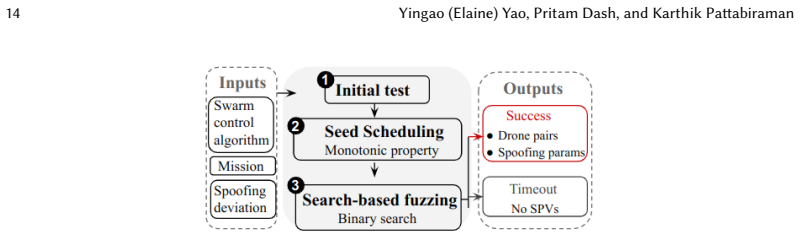
Summary. The paper introduces Swarm Propagation Vulnerabilities (SPVs), in which GPS spoofing on a target drone in a swarm propagates through the control algorithm to cause victim drones to deviate and collide. It proposes two fuzzing tools—SwarmFuzzGraph (graph theory plus gradient-guided optimization) and SwarmFuzzBinary (observation-based seed scheduling plus binary search)—to discover such vulnerabilities. Evaluation on a popular swarm control algorithm reports an average 48.8% success rate for SwarmFuzzGraph (which fails on other topologies) while SwarmFuzzBinary achieves comparable rates across all tested algorithms.
Significance. If the central claim holds, the work would be significant for identifying previously unstudied security risks in swarm control algorithms used in safety-critical applications. The introduction of SPVs as a distinct vulnerability class and the provision of two concrete fuzzing approaches constitute a useful starting point for systematic security analysis of swarm dynamics. The empirical comparison across topologies is a positive aspect of the evaluation design.
major comments (1)
- [Abstract] Abstract: The reported success rates (48.8% for SwarmFuzzGraph) are defined solely as the rate of “finding SPVs,” yet the manuscript supplies no description of the downstream verification step that confirms the spoofed positions on the target drone actually produce measurable collisions among victim drones under the swarm dynamics model. This verification link—including the position-update equations, trajectory simulation fidelity, and collision-detection threshold—is load-bearing for the claim that SPVs result in collisions.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and the recommendation for major revision. The single major comment raises a valid point about the need for clearer description of the verification process linking SPV discovery to collisions. We address this directly below.
read point-by-point responses
-
Referee: [Abstract] Abstract: The reported success rates (48.8% for SwarmFuzzGraph) are defined solely as the rate of “finding SPVs,” yet the manuscript supplies no description of the downstream verification step that confirms the spoofed positions on the target drone actually produce measurable collisions among victim drones under the swarm dynamics model. This verification link—including the position-update equations, trajectory simulation fidelity, and collision-detection threshold—is load-bearing for the claim that SPVs result in collisions.
Authors: We agree that the current manuscript does not adequately describe the downstream verification step. The abstract and main text focus on the fuzzing process for identifying candidate SPVs but omit explicit details on how spoofed positions are fed into the swarm dynamics model, the position-update equations used, the fidelity of the trajectory simulation, and the precise collision-detection threshold. In the revised manuscript we will (1) expand the abstract to briefly note that discovered SPVs are verified via simulation of the swarm control algorithm, and (2) add a new subsection (likely in Section 4 or 5) that specifies the dynamics model, update equations, simulation parameters, and collision criterion. This revision will make the empirical claim that SPVs produce collisions fully traceable. revision: yes
Circularity Check
No circularity; empirical evaluation with no derivations or self-referential fits.
full rationale
Paper introduces fuzzing tools (SwarmFuzzGraph, SwarmFuzzBinary) and reports empirical success rates (e.g., 48.8%) for finding SPVs in swarm control algorithms. No equations, parameter fitting, predictions derived from inputs, or self-citations are described in the provided text. Evaluation metrics are defined directly from the fuzzing process without reduction to prior results by construction. Central claim rests on simulation outcomes rather than any closed derivation loop.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
[n. d.]. American fuzzy lop. Available at: https://lcamtuf.coredump.cx/afl/
-
[2]
[n. d.]. Droneseed. Available at: https://droneseed.com/rapid-reforestation
-
[3]
Global Positioning System Standard Positioning Service Performance Standard
2008. Global Positioning System Standard Positioning Service Performance Standard. Available at: https://www.gps. gov/technical/ps/2008-SPS-performance-standard.pdf
2008
-
[4]
syzkaller is an unsupervised, coverage-guided kernel fuzzer
2018. syzkaller is an unsupervised, coverage-guided kernel fuzzer. Available at: https://github.com/google/syzkaller
2018
-
[5]
GPS Jammers Used in 85% of Cargo Truck Thefts – Mexico Has Taken Action
2020. GPS Jammers Used in 85% of Cargo Truck Thefts – Mexico Has Taken Action. Available at: https://rntfnd.org/ 2020/10/30/gps-jammers-used-in-85-of-cargo-truck-thefts-mexico-has-taken-action/
2020
-
[6]
LibFuzzer: a library for coverage-guided fuzz testing
2021. LibFuzzer: a library for coverage-guided fuzz testing. Available at: https://llvm.org/docs/LibFuzzer.html
2021
-
[7]
Google scholar citation page of Olfati-Saber algorithm
August, 2023. Google scholar citation page of Olfati-Saber algorithm. Available at: https://scholar.google.ca/scholar?hl= en&as_sdt=05%2C5&q=DISTRIBUTED+COOPERATIVE+CONTROL+OF+MULTIPLE+VEHICLE+FORMATIONS+ USING+STRUCTURAL+POTENTIAL+FUNCTIONS&btnG=
2023
-
[8]
Google scholar citation page of Vicsek algorithm
August, 2023. Google scholar citation page of Vicsek algorithm. Available at: https://scholar.google.ca/scholar?hl=en& as_sdt=0%2C5&q=Optimized+flocking+of+autonomous+drones+in+confined+environments&btnG=
2023
-
[9]
2019.Adaptive Control of Swarm of Drones for Obstacle A voidance
Ruslan Agishev and Evgeny Tsykunov. 2019.Adaptive Control of Swarm of Drones for Obstacle A voidance. https: //github.com/RuslanAgishev/adaptive_swarm
2019
-
[10]
Sandra Pérez Arteaga, Luis Alberto Martínez Hernández, Gabriel Sánchez Pérez, Ana Lucila Sandoval Orozco, and Luis Javier García Villalba. 2019. Analysis of the GPS spoofing vulnerability in the drone 3DR solo.IEEE Access7 (2019), 51782–51789
2019
-
[11]
Cornelius Aschermann, Sergej Schumilo, Tim Blazytko, Robert Gawlik, and Thorsten Holz. 2019. REDQUEEN: Fuzzing with Input-to-State Correspondence.. InProceedings 2019 Network and Distributed System Security Symposium
2019
-
[12]
Paul J Bonczek, Rahul Peddi, Shijie Gao, and Nicola Bezzo. 2022. Detection of Nonrandom Sign-Based Behavior for Resilient Coordination of Robotic Swarms.IEEE Transactions on Robotics38, 1 (2022), 92–109. doi:10.1109/TRO.2021. 3139592
-
[13]
Aaron Boyd. 2019. The Pentagon Wants AI-Driven Drone Swarms for Search and Rescue Ops. Available at: https://www. nextgov.com/emerging-tech/2019/12/pentagon-wants-ai-driven-drone-swarms-search-and-rescue-ops/162113/
2019
-
[14]
Manuele Brambilla, Eliseo Ferrante, Mauro Birattari, and Marco Dorigo. 2013. Swarm robotics: a review from the swarm engineering perspective.Swarm Intelligence7 (2013), 1–41
2013
-
[15]
Matthias R Brust, Grégoire Danoy, Pascal Bouvry, Dren Gashi, Himadri Pathak, and Mike P Gonçalves. 2017. Defending against intrusion of malicious UAVs with networked UAV defense swarms. In2017 IEEE 42nd conference on local computer networks workshops (LCN workshops). IEEE, 103–111
2017
-
[16]
Sébastien Bubeck et al. 2015. Convex optimization: Algorithms and complexity.Foundations and Trends®in Machine Learning(2015)
2015
-
[17]
Peng Chen and Hao Chen. 2018. Angora: Efficient Fuzzing by Principled Search. In2018 IEEE Symposium on Security and Privacy (SP)
2018
-
[18]
Yuan Chen, Soummya Kar, and José M. F. Moura. 2018. Resilient Distributed Estimation Through Adversary Detection. IEEE Transactions on Signal Processing(2018). doi:10.1109/TSP.2018.2813330
-
[19]
Mario Giovanni C. A. Cimino, Massimiliano Lega, Manilo Monaco, and Gigliola Vaglini. 2019. Adaptive Exploration of a UAVs Swarm for Distributed Targets Detection and Tracking. InInternational Conference on Pattern Recognition Applications and Methods. https://api.semanticscholar.org/CorpusID:88494284
2019
-
[20]
Pritam Dash, Ethan Chan, and Karthik Pattabiraman. 2024. SpecGuard: Specification Aware Recovery for Robotic Autonomous Vehicles from Physical Attacks. InProceedings of the 2024 on ACM SIGSAC Conference on Computer and Communications Security(Salt Lake City, UT, USA)(CCS ’24). Association for Computing Machinery, New York, NY, USA, 1849–1863. doi:10.1145/...
-
[21]
Pritam Dash, Mehdi Karimibiuki, and Karthik Pattabiraman. 2019. Out of Control: Stealthy Attacks against Robotic Vehicles Protected by Control-Based Techniques. InProceedings of the 35th Annual Computer Security Applications Conference. 24 Yingao (Elaine) Yao, Pritam Dash, and Karthik Pattabiraman
2019
-
[22]
Pritam Dash, Guanpeng Li, Zitao Chen, Mehdi Karimibiuki, and Karthik Pattabiraman. 2021. PID-Piper: Recovering Robotic Vehicles from Physical Attacks. In2021 51st Annual IEEE/IFIP International Conference on Dependable Systems and Networks (DSN)
2021
-
[23]
Drew Davidson, Hao Wu, Robert Jellinek, Thomas Ristenpart, and Vikas Singh. 2016. Controlling UAVs with Sensor Input Spoofing Attacks. In10th USENIX Workshop on Offensive Technologies (WOOT 16)
2016
-
[24]
Stav Dimitropoulos. 2019. If one drone isn’t enough, try a drone swarm. Available at: https://www.bbc.com/news/ business-49177704
2019
-
[25]
João Gaspar, Renato Ferreira, Pedro Sebastião, and Nuno Souto. 2020. Capture of UAVs through gps spoofing using low-cost SDR platforms.Wireless Personal Communications115 (2020), 2729–2754
2020
-
[26]
Patrice Godefroid, Adam Kiezun, and Michael Y. Levin. 2008. Grammar-Based Whitebox Fuzzing.SIGPLAN Not.43, 6 (jun 2008), 206–215. doi:10.1145/1379022.1375607
-
[27]
Daojing He, Yinrong Qiao, Shiqing Chen, Xiao Du, Wenjie Chen, Sencun Zhu, and Mohsen Guizani. 2019. A Friendly and Low-Cost Technique for Capturing Non-Cooperative Civilian Unmanned Aerial Vehicles.IEEE Network(2019)
2019
-
[28]
Xinyu Huang, Yunzhe Tian, Yifei He, Endong Tong, Wenjia Niu, Chenyang Li, Jiqiang Liu, and Liang Chang. 2020. Exposing spoofing attack on flocking-based unmanned aerial vehicle cluster: A threat to swarm intelligence.Security and Communication Networks2020 (2020), 1–15
2020
-
[29]
Todd E Humphreys, Brent M Ledvina, Mark L Psiaki, Brady W O’Hanlon, Paul M Kintner, et al. 2008. Assessing the spoofing threat: Development of a portable GPS civilian spoofer. InProceedings of the 21st International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2008). 2314–2325
2008
-
[30]
Chijung Jung, Ali Ahad, Yuseok Jeon, and Yonghwi Kwon. 2022. SWARMFLAWFINDER: Discovering and Exploiting Logic Flaws of Swarm Algorithms. In2022 IEEE Symposium on Security and Privacy (SP)
2022
-
[31]
Chijung Jung, Ali Ahad, Jinho Jung, Sebastian Elbaum, and Yonghwi Kwon. 2021. Swarmbug: Debugging Configuration Bugs in Swarm Robotics. InProceedings of the 29th ACM Joint Meeting on European Software Engineering Conference and Symposium on the Foundations of Software Engineering
2021
-
[32]
Andrew J Kerns, Daniel P Shepard, Jahshan A Bhatti, and Todd E Humphreys. 2014. Unmanned aircraft capture and control via GPS spoofing.Journal of Field Robotics31, 4 (2014), 617–636
2014
-
[34]
Hyungsub Kim, Muslum Ozgur Ozmen, Antonio Bianchi, Z Berkay Celik, and Dongyan Xu. 2021. PGFUZZ: Policy- Guided Fuzzing for Robotic Vehicles. InProceedings 2021 Network and Distributed System Security Symposium
2021
-
[36]
Taegyu Kim, Chung Hwan Kim, Junghwan Rhee, Fan Fei, Zhan Tu, Gregory Walkup, Xiangyu Zhang, Xinyan Deng, and Dongyan Xu. 2019. RVFuzzer: Finding Input Validation Bugs in Robotic Vehicles through Control-Guided Testing. In28th USENIX Security Symposium (USENIX Security 19)
2019
-
[37]
Yoram Koren, Johann Borenstein, et al. 1991. Potential field methods and their inherent limitations for mobile robot navigation.. InIcra, Vol. 2. 1398–1404
1991
-
[38]
Young-Min Kwon, Jaemin Yu, Byeong-Moon Cho, Yongsoon Eun, and Kyung-Joon Park. 2018. Empirical Analysis of MAVLink Protocol Vulnerability for Attacking Unmanned Aerial Vehicles.IEEE Access(2018)
2018
-
[39]
Liangjun Liu, Hongyan Qian, and Feng Hu. 2019. Random label based security authentication mechanism for large-scale uav swarm. In2019 IEEE Intl Conf on Parallel & Distributed Processing with Applications, Big Data & Cloud Computing, Sustainable Computing & Communications, Social Computing & Networking. IEEE, 229–235
2019
-
[40]
Mark EJ Newman. 2008. The mathematics of networks.The new palgrave encyclopedia of economics2, 2008 (2008), 1–12
2008
-
[41]
Juhwan Noh, Yujin Kwon, Yunmok Son, Hocheol Shin, Dohyun Kim, Jaeyeong Choi, and Yongdae Kim. 2019. Tractor beam: Safe-hijacking of consumer drones with adaptive GPS spoofing.ACM Transactions on Privacy and Security (TOPS)22, 2 (2019), 1–26
2019
-
[42]
Reza Olfati-Saber and Richard M Murray. 2002. Distributed cooperative control of multiple vehicle formations using structural potential functions.IFAC Proceedings Volumes35, 1 (2002), 495–500
2002
-
[43]
1999.The PageRank citation ranking: Bringing order to the web.Technical Report
Lawrence Page, Sergey Brin, Rajeev Motwani, and Terry Winograd. 1999.The PageRank citation ranking: Bringing order to the web.Technical Report. Stanford infolab
1999
-
[44]
Xue Bin Peng, Marcin Andrychowicz, Wojciech Zaremba, and Pieter Abbeel. 2018. Sim-to-Real Transfer of Robotic Control with Dynamics Randomization. In2018 IEEE International Conference on Robotics and Automation (ICRA). IEEE Press, 1–8. doi:10.1109/ICRA.2018.8460528
-
[45]
Maya Posch. 2022. Knowing your place: the implications of GPS spoofing and jamming. Available at: https://hackaday. com/2022/05/23/knowing-your-place-the-implications-of-gps-spoofing-and-jamming/. Framework for Discovering GPS Spoofing Attacks in Drone Swarms 25
2022
-
[46]
Harshad Sathaye, Gerald LaMountain, Pau Closas, and Aanjhan Ranganathan. 2022. SemperFi: Anti-spoofing GPS receiver for UAVs. InProceedings 2022 Network and Distributed System Security Symposium
2022
-
[47]
Harshad Sathaye, Martin Strohmeier, Vincent Lenders, and Aanjhan Ranganathan. 2022. An Experimental Study of GPS Spoofing and Takeover Attacks on UAVs. In31st USENIX Security Symposium (USENIX Security 22)
2022
-
[48]
Sergej Schumilo, Cornelius Aschermann, Robert Gawlik, Sebastian Schinzel, and Thorsten Holz. 2017. kAFL: Hardware- Assisted Feedback Fuzzing for OS Kernels.. In26th USENIX Security Symposium (USENIX Security 17). 167–182
2017
-
[49]
Dongdong She, Abhishek Shah, and Suman Jana. 2022. Effective seed scheduling for fuzzing with graph centrality analysis. In2022 IEEE Symposium on Security and Privacy (SP)
2022
-
[50]
Junjie Shen, Jun Yeon Won, Zeyuan Chen, and Qi Alfred Chen. 2020. Drift with devil: Security of multi-sensor fusion based localization in high-level autonomous driving under GPS spoofing. InProceedings of the 29th USENIX Security Symposium (USENIX Security ’20)
2020
-
[51]
William Zheng Simone McCarthy and Denise Tsang. 2018. HK $1 million in damage caused by GPS jamming that caused 46 drones to plummet during Hong Kong show. Available at: https://www.scmp.com/news/hong-kong/law- and-crime/article/2170669/hk13-million-damage-caused-gps-jamming-caused-46-drones
-
[52]
Yunmok Son, Hocheol Shin, Dongkwan Kim, Youngseok Park, Juhwan Noh, Kibum Choi, Jungwoo Choi, and Yongdae Kim. 2015. Rocking Drones with Intentional Sound Noise on Gyroscopic Sensors. In24th USENIX Security Symposium (USENIX Security 15)
2015
-
[53]
Enrica Soria, Fabrizio Schiano, and Dario Floreano. 2020. SwarmLab: a Matlab Drone Swarm Simulator. In2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 8005–8011. doi:10.1109/IROS45743.2020.9340854
-
[54]
Volker Strobel, Eduardo Castelló Ferrer, and Marco Dorigo. 2020. Blockchain technology secures robot swarms: A comparison of consensus protocols and their resilience to byzantine robots.Frontiers in Robotics and AI(2020)
2020
-
[55]
Volker Strobel, Alexandre Pacheco, and Marco Dorigo. 2023. Robot swarms neutralize harmful Byzantine robots using a blockchain-based token economy.Science Robotics(2023)
2023
-
[56]
Max Taylor, Haicheng Chen, Feng Qin, and Christopher Stewart. 2021. Avis: In-situ model checking for unmanned aerial vehicles. In2021 51st Annual IEEE/IFIP International Conference on Dependable Systems and Networks (DSN)
2021
-
[57]
Nils Ole Tippenhauer, Christina Pöpper, Kasper Bonne Rasmussen, and Srdjan Capkun. 2011. On the Requirements for Successful GPS Spoofing Attacks. InProceedings of the 2011 ACM SIGSAC Conference on Computer and Communications Security
2011
-
[58]
Timothy Trippel, Ofir Weisse, Wenyuan Xu, Peter Honeyman, and Kevin Fu. 2017. WALNUT: Waging Doubt on the Integrity of MEMS Accelerometers with Acoustic Injection Attacks. In2017 IEEE European Symposium on Security and Privacy
2017
-
[59]
Gábor Vásárhelyi, Csaba Virágh, Gergő Somorjai, Tamás Nepusz, Agoston E Eiben, and Tamás Vicsek. 2018. Optimized flocking of autonomous drones in confined environments.Science Robotics3, 20 (2018), eaat3536
2018
-
[60]
Kacper Wardega, Max von Hippel, Roberto Tron, Cristina Nita-Rotaru, and Wenchao Li. 2023. Byzantine Resilience at Swarm Scale: A Decentralized Blocklist Protocol from Inter-Robot Accusations. InProceedings of the 2023 International Conference on Autonomous Agents and Multiagent Systems (AAMAS ’23). 1430–1438
2023
-
[61]
Kyle D Wesson, Daniel P Shepard, Jahshan A Bhatti, and Todd E Humphreys. 2011. An evaluation of the vestigial signal defense for civil GPS anti-spoofing. InProceedings of the 24th International Technical Meeting of the Satellite Division of The institute of navigation (ION GNSS 2011). 2646–2656
2011
-
[62]
Yingao Elaine Yao, Pritam Dash, and Karthik Pattabiraman. 2023. SwarmFuzz: Discovering GPS Spoofing Attacks in Drone Swarms. In2023 53rd Annual IEEE/IFIP International Conference on Dependable Systems and Networks (DSN). 366–375. doi:10.1109/DSN58367.2023.00043
-
[63]
Wente Zeng and Mo-Yuen Chow. 2014. Resilient Distributed Control in the Presence of Misbehaving Agents in Networked Control Systems.IEEE transactions on cybernetics44 (11 2014), 2038–2049. doi:10.1109/TCYB.2014.2301434
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.