AI-IoT-Robotics Integration: Survey of Frameworks, Emerging Trends, and the Path Toward Connected Robotics
Pith reviewed 2026-06-28 17:21 UTC · model grok-4.3
The pith
Hybrid SLM-LLM systems paired with IoT infrastructure and robotic agents address real-time adaptation, scalability, and reliability gaps.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper establishes that a modular system architecture aligning small language models at the edge with large language models in the cloud, combined with IoT sensing and robotic actuation, overcomes documented gaps in interoperability and feedback control. This setup supports distributed cognition and autonomous decision-making, allowing systems to handle real-time adaptation, scalability, and reliability challenges that current pairwise integrations leave unresolved.
What carries the argument
The modular system architecture that places SLMs at the edge and LLMs in the cloud to integrate AI perception, IoT communication, and robotic actuation for distributed cognition.
If this is right
- Existing work can be classified by integration depth to guide future designs.
- Hybrid SLM-LLM coupling with IoT and robots delivers real-time adaptation in dynamic settings.
- Scalability improves through distributed edge-cloud processing.
- Reliability increases via better feedback control loops across the three domains.
- The architecture provides a technical roadmap for connected robotics and physical AI ecosystems.
Where Pith is reading between the lines
- Testing the proposed modular layers on a physical robot fleet could reveal whether edge SLMs reduce cloud latency enough to meet safety-critical timing needs.
- Standardized interfaces between SLM outputs and IoT data streams might emerge as a practical next step the survey leaves open.
- The same architecture could apply to non-robotic domains like smart infrastructure if the feedback control gaps prove domain-independent.
Load-bearing premise
Documented gaps in interoperability and feedback control between AI, IoT, and robotics can be closed by a modular architecture without creating new incompatibilities beyond those already seen in pairwise integrations.
What would settle it
An implemented three-way system that achieves full real-time adaptation, scalability, and reliability using only existing pairwise methods without any modular SLM-LLM layering, or a modular prototype that introduces new control incompatibilities not present in the pairwise cases.
Figures
read the original abstract
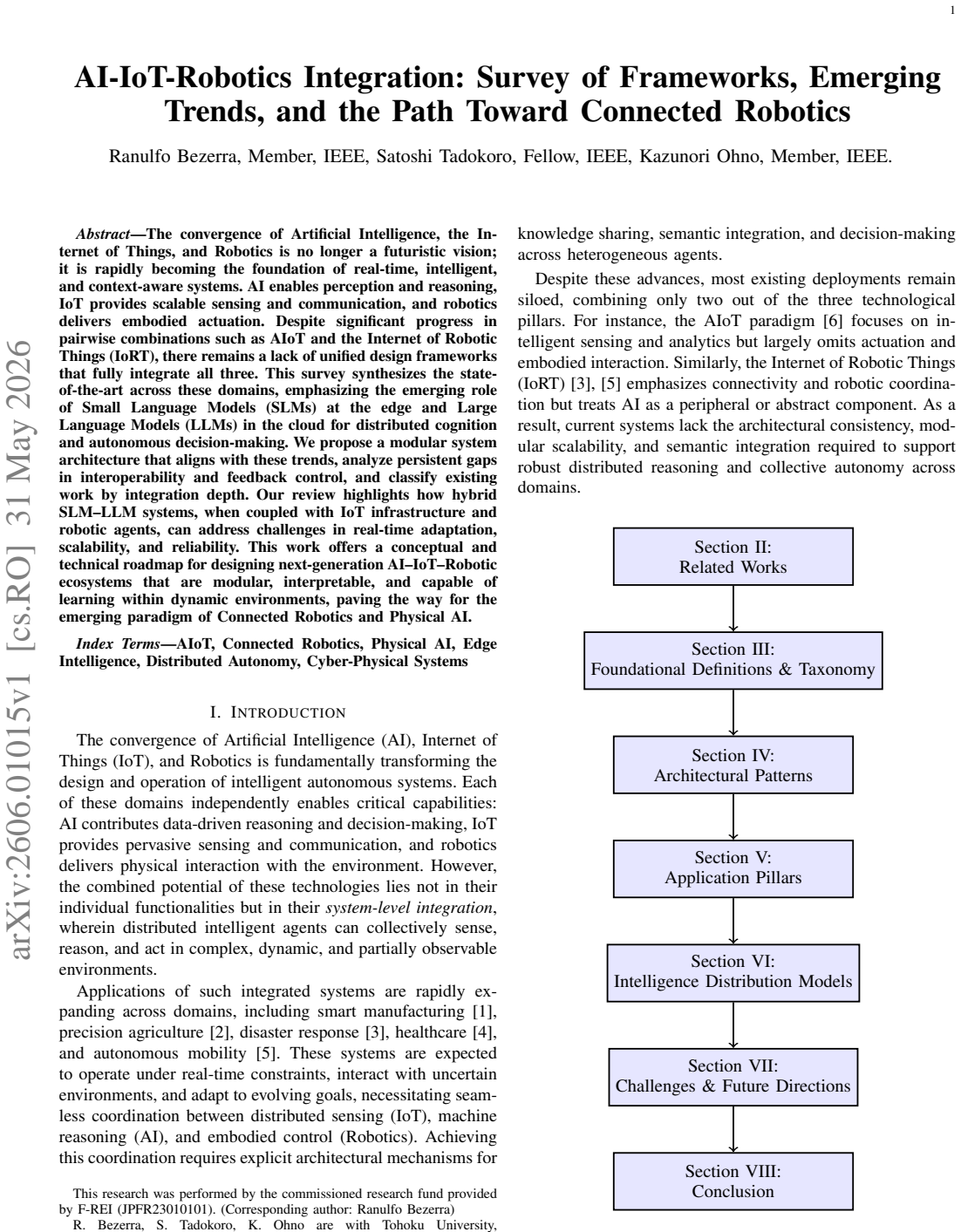
The convergence of Artificial Intelligence, the Internet of Things, and Robotics is no longer a futuristic vision; it is rapidly becoming the foundation of real-time, intelligent, and context-aware systems. AI enables perception and reasoning, IoT provides scalable sensing and communication, and robotics delivers embodied actuation. Despite significant progress in pairwise combinations such as AIoT and the Internet of Robotic Things (IoRT), there remains a lack of unified design frameworks that fully integrate all three. This survey synthesizes the state-of-the-art across these domains, emphasizing the emerging role of Small Language Models (SLMs) at the edge and Large Language Models (LLMs) in the cloud for distributed cognition and autonomous decision-making. We propose a modular system architecture that aligns with these trends, analyze persistent gaps in interoperability and feedback control, and classify existing work by integration depth. Our review highlights how hybrid SLM-LLM systems, when coupled with IoT infrastructure and robotic agents, can address challenges in real-time adaptation, scalability, and reliability. This work offers a conceptual and technical roadmap for designing next-generation AI-IoT-Robotic ecosystems that are modular, interpretable, and capable of learning within dynamic environments, paving the way for the emerging paradigm of Connected Robotics and Physical AI.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper is a survey synthesizing pairwise integrations of AI with IoT (AIoT) and robotics (IoRT), proposing a conceptual modular architecture that combines Small Language Models at the edge with Large Language Models in the cloud for distributed cognition, classifying prior work by integration depth, identifying gaps in interoperability and feedback control, and presenting a roadmap toward the paradigms of Connected Robotics and Physical AI. The central claim is that hybrid SLM-LLM systems coupled with IoT and robotic agents can address real-time adaptation, scalability, and reliability challenges.
Significance. If the synthesis is comprehensive and the classification scheme proves reproducible, the manuscript could provide a useful organizing framework and timely overview for the emerging intersection of these fields, highlighting the shift from pairwise to tripartite integration and the role of hybrid language models. The explicit roadmap and gap analysis are strengths for guiding future systems work in robotics and IoT.
major comments (2)
- [Classification of Existing Work] The section classifying existing work by integration depth does not define or operationalize the criteria for assigning papers to depth categories (e.g., no taxonomy table, decision procedure, or inter-rater reliability discussion), which directly undermines the claim of systematic classification and makes it impossible to verify completeness or bias in the synthesis.
- [Proposed Modular System Architecture] In the description of the proposed modular architecture, the manuscript asserts that the hybrid SLM-LLM design resolves gaps in feedback control and interoperability but provides no concrete interface specifications, data-flow diagrams, or comparison against existing pairwise systems that would demonstrate resolution without introducing new incompatibilities.
minor comments (2)
- [Abstract and Introduction] The abstract and introduction introduce the terms 'Connected Robotics' and 'Physical AI' as emerging paradigms without providing even a brief working definition or citation to prior usage, which reduces clarity for readers.
- [State-of-the-Art Review] Several citations to recent SLM and LLM robotics papers appear without discussion of their specific limitations in real-time IoT settings, which would strengthen the gap analysis.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help improve the clarity and rigor of our survey. We provide point-by-point responses to the major comments below.
read point-by-point responses
-
Referee: [Classification of Existing Work] The section classifying existing work by integration depth does not define or operationalize the criteria for assigning papers to depth categories (e.g., no taxonomy table, decision procedure, or inter-rater reliability discussion), which directly undermines the claim of systematic classification and makes it impossible to verify completeness or bias in the synthesis.
Authors: We agree that the original manuscript did not provide explicit operational criteria for the integration depth classification. This is a valid point. In the revised manuscript, we will introduce a taxonomy table that clearly defines the categories (e.g., Level 1: Pairwise AI-IoT, Level 2: IoRT, Level 3: Full AI-IoT-Robotics) and a step-by-step decision procedure for classifying papers. Although inter-rater reliability metrics are uncommon in survey papers without multiple coders, the added procedure will allow readers to reproduce the classification. revision: yes
-
Referee: [Proposed Modular System Architecture] In the description of the proposed modular architecture, the manuscript asserts that the hybrid SLM-LLM design resolves gaps in feedback control and interoperability but provides no concrete interface specifications, data-flow diagrams, or comparison against existing pairwise systems that would demonstrate resolution without introducing new incompatibilities.
Authors: The architecture is presented as a high-level conceptual proposal aligned with emerging trends, rather than a detailed engineering specification. To strengthen this section, we will add data-flow diagrams illustrating the SLM-LLM interaction via IoT middleware, example interface specifications (such as standardized message formats for feedback loops), and a brief comparison table against selected pairwise systems (e.g., AIoT and IoRT) to show how the tripartite integration mitigates the gaps without introducing incompatibilities. revision: yes
Circularity Check
No significant circularity identified
full rationale
The paper is a literature survey synthesizing pairwise integrations (AIoT, IoRT) and proposing a conceptual modular architecture for AI-IoT-robotics convergence. It contains no equations, fitted parameters, quantitative predictions, or derivation chains. Central claims rest on review of external prior work rather than any self-referential reduction, self-citation load-bearing premise, or ansatz smuggled via citation. No load-bearing step reduces to its own inputs by construction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption AI enables perception and reasoning, IoT provides scalable sensing and communication, and robotics delivers embodied actuation.
invented entities (2)
-
Connected Robotics
no independent evidence
-
Physical AI
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Research toward iot and robotics in intelligent manufac- turing: A survey,
X. J. Liu, “Research toward iot and robotics in intelligent manufac- turing: A survey,”International Journal of Materials, Mechanics and Manufacturing, vol. 7, no. 3, pp. 128–132, 2019
2019
-
[2]
Internet of robotic things in smart domains: Applications and challenges,
L. Romeo, A. Petitti, R. Marani, and A. Milella, “Internet of robotic things in smart domains: Applications and challenges,”Sensors, vol. 20, no. 12, p. 3355, 2020
2020
-
[3]
Towards the internet of robotic things: Analysis, architecture, components and challenges,
I. Afanasyev, M. Mazzara, S. Chakraborty, N. Zhuchkov, A. Maksatbek, A. Yesildirek, M. Kassab, and S. Distefano, “Towards the internet of robotic things: Analysis, architecture, components and challenges,” in2019 12th International Conference on Developments in eSystems Engineering (DeSE). IEEE, 2019, pp. 3–8
2019
-
[4]
Internet of things and robotics in transforming current- day healthcare services,
B. Pradhan, D. Bharti, S. Chakravarty, S. S. Ray, V . V oinova, A. Bonart- sev, and K. Pal, “Internet of things and robotics in transforming current- day healthcare services,”Journal of Healthcare Engineering, vol. 2021, pp. 1–15, 2021
2021
-
[5]
Internet of robotic things: A review,
S. Khalid, “Internet of robotic things: A review,”Journal of Applied Science & Technology Trends, vol. 2, no. 2, pp. 106–118, 2021
2021
-
[6]
Artificial intelli- gence of things: A survey,
S. I. Siam, H. Ahn, L. Liu, S. Alam, H. Shen, Z. Cao, N. Shroff, B. Krishnamachari, M. Srivastava, and M. Zhang, “Artificial intelli- gence of things: A survey,”ACM Transactions on Sensor Networks, vol. 21, no. 1, pp. 1–75, 2025
2025
-
[7]
Enhancing security of internet of robotic things: A review of recent trends, practices, and recommendations with encryption and blockchain techniques,
E. I. Zafir, F. Rahim, M. Ameenet al., “Enhancing security of internet of robotic things: A review of recent trends, practices, and recommendations with encryption and blockchain techniques,”Internet of Things, vol. 28, p. 101357, 2024
2024
-
[8]
N. Bout, G. Moukhliss, H. Belhadaoui, N. Afifi, and M. Abik, “Integrating emotional ai, iot, and robotics for patient-centered healthcare: Challenges and future directions,”Discover Internet of Things, vol. 5, no. 1, 2025. [Online]. Available: https: //doi.org/10.1007/s43926-025-00174-w
-
[9]
M. E. Karar, H. I. Shehata, and O. Reyad, “A survey of iot-based fall detection for aiding elderly care: Sensors, methods, challenges and future trends,”Applied Sciences, vol. 12, no. 7, p. 3276, 2022. [Online]. Available: https://doi.org/10.3390/app12073276
-
[10]
The role of automation and robotics in transforming hydroponics and aquaponics to large scale,
M. S. Dennison, P. S. Kumar, F. B. Wamyil, A. A. Meji, and T. Ganapathy, “The role of automation and robotics in transforming hydroponics and aquaponics to large scale,”Discover Sustainability, vol. 6, no. 1, 2025. [Online]. Available: https: //doi.org/10.1007/s43621-025-00908-4
-
[11]
A survey on integration of large language models with intelligent robots,
Y . Kim, D. Kim, J. Choi, J. Park, N. Oh, and D. Park, “A survey on integration of large language models with intelligent robots,”Intelligent Service Robotics, vol. 17, pp. 1091–1107, 2024
2024
-
[12]
Ai-driven iot in robotics: Emerging trends, challenges and opportunities,
M. Alam, J. Raju, N. Reddyet al., “Ai-driven iot in robotics: Emerging trends, challenges and opportunities,”REST Journal on Emerging Trends in Modelling and Manufacturing, vol. 11, no. 1, pp. 1–10, 2025. 13
2025
-
[13]
Russell and P
S. Russell and P. Norvig,Artificial Intelligence: A Modern Approach, 3rd ed. Pearson, 2016
2016
-
[14]
Deep learning for anomaly detection: A review,
G. Pang, C. Shen, L. Cao, and A. van den Hengel, “Deep learning for anomaly detection: A review,”ACM Computing Surveys, vol. 54, no. 2, pp. 1–38, 2021
2021
-
[15]
Empowering things with intelligence: A survey of the progress, challenges, and opportunities in artificial intelligence of things,
J. Zhang and D. Tao, “Empowering things with intelligence: A survey of the progress, challenges, and opportunities in artificial intelligence of things,”IEEE Internet of Things Journal, vol. 7, no. 9, pp. 8676–8699, 2020
2020
-
[16]
The internet of things: A survey,
L. Atzori, A. Iera, and G. Morabito, “The internet of things: A survey,” Computer Networks, vol. 54, no. 15, pp. 2787–2805, 2010
2010
-
[17]
Internet of things (iot): A literature review,
S. Madakam, R. Ramaswamy, and S. Tripathi, “Internet of things (iot): A literature review,”Journal of Computer and Communications, vol. 3, no. 5, pp. 164–173, 2015
2015
-
[18]
J. Ren, D. Zhang, S. He, Y . Zhang, and T. Li, “A survey on end- edge-cloud orchestrated network computing paradigms: Transparent computing, mobile edge computing, fog computing, and cloudlet,” ACM Comput. Surv., vol. 52, no. 6, Oct. 2019. [Online]. Available: https://doi.org/10.1145/3362031
-
[19]
Edge intelligence: Paving the last mile of artificial intelligence with edge computing,
Z. Zhou, X. Chen, E. Liet al., “Edge intelligence: Paving the last mile of artificial intelligence with edge computing,”Proceedings of the IEEE, vol. 107, no. 8, pp. 1738–1762, 2019
2019
-
[20]
Internet of robotic things: Concept, technologies, and challenges,
P. P. Ray, “Internet of robotic things: Concept, technologies, and challenges,”IEEE Access, vol. 4, pp. 9489–9500, 2017
2017
-
[21]
Siciliano and O
B. Siciliano and O. Khatib,Springer Handbook of Robotics, 2nd ed. Springer, 2016
2016
-
[22]
Reinforcement learning in robotics: A survey,
J. Kober, J. A. Bagnell, and J. Peters, “Reinforcement learning in robotics: A survey,”The International Journal of Robotics Research, vol. 32, no. 11, pp. 1238–1274, 2013. [Online]. Available: https://doi.org/10.1177/0278364913495721
-
[23]
Internet of robotic things: Current technologies, challenges, applications, and future research topics,
J. Krej ˇc´ı, M. Babiuch, J. Suder, V . Krys, and Z. Bobovsk ´y, “Internet of robotic things: Current technologies, challenges, applications, and future research topics,”Sensors, vol. 25, no. 3, p. 765, 2025
2025
-
[24]
Mocaru: Low-cost wireless portable robot localization system using iot,
R. Assabumrungrat, R. Bezerra, I. Barros, S. Kojima, Y . Okada, M. Konyo, K. Ohno, and S. Tadokoro, “Mocaru: Low-cost wireless portable robot localization system using iot,” inIEEE International Conference on Systems, Man, and Cybernetics, SMC 2023, Honolulu, Oahu, HI, USA, October 1-4, 2023. IEEE, 2023, pp. 3458–3465. [Online]. Available: https://doi.org...
-
[25]
Improving indoor localization: A low-cost, multi-marker and multi-camera system for robot tracking,
I. Barros, R. Bezerra, R. Assabumrungrat, S. Kojima, Y . Okada, M. Konyo, K. Ohno, and S. Tadokoro, “Improving indoor localization: A low-cost, multi-marker and multi-camera system for robot tracking,” inIEEE/SICE International Symposium on System Integration, SII 2025, Munich, Germany, January 21-24, 2025. IEEE, 2025, pp. 1083–1089. [Online]. Available: ...
-
[26]
Edge ai for industry 4.0: An internet of things approach,
A. Tziovaras and F. Foukalas, “Edge ai for industry 4.0: An internet of things approach,” inProceedings of the 24th Pan-Hellenic Conference on Informatics (PCI). ACM, 2020, pp. 121–126
2020
-
[27]
Toward an intelligent edge: Wireless communication meets machine learning,
G. Zhu, D. Liu, Y . Du, C. You, J. Zhang, and K. Huang, “Toward an intelligent edge: Wireless communication meets machine learning,” IEEE Communications Magazine, vol. 58, no. 1, pp. 19–25, 2020
2020
-
[28]
Fog computing and its role in the internet of things,
F. Bonomi, R. Milito, J. Zhu, and S. Addepalli, “Fog computing and its role in the internet of things,”Proceedings of the First Edition of the MCC Workshop on Mobile Cloud Computing, pp. 13–16, 2012
2012
-
[29]
Mobile edge computing: A survey on archi- tecture and computation offloading,
P. Mach and Z. Becvar, “Mobile edge computing: A survey on archi- tecture and computation offloading,”IEEE Communications Surveys & Tutorials, vol. 19, no. 3, pp. 1628–1656, 2017
2017
-
[30]
Fog robotics for efficient, fluent and robust human-robot interaction,
S. Gudi, C. Leela Krishna, S. Ojha, B. Johnston, J. Clark, and M.-A. Williams, “Fog robotics for efficient, fluent and robust human-robot interaction,” in2018 IEEE 17th International Symposium on Network Computing and Applications (NCA). IEEE, 2018, pp. 1–8
2018
-
[31]
Comparison of middlewares in edge-to-edge and edge-to-cloud communication for distributed ROS 2 systems,
J. Zhang, X. Yu, S. Ha, J. P. Queralta, and T. Westerlund, “Comparison of middlewares in edge-to-edge and edge-to-cloud communication for distributed ROS 2 systems,”Journal of Intelligent & Robotic Systems, vol. 110, p. 162, 2024
2024
-
[32]
Latency-aware schedul- ing for data-oriented service requests in collaborative iot-edge-cloud networks,
M. Sun, S. Quan, X. Wang, and Z. Huang, “Latency-aware schedul- ing for data-oriented service requests in collaborative iot-edge-cloud networks,”Future Generation Computer Systems, vol. 163, p. 107538, 2025
2025
-
[33]
Qos-aware augmented reality task offloading and resource allocation in cloud-edge collaboration environ- ment,
J. Hao, Y . Chen, and J. Gan, “Qos-aware augmented reality task offloading and resource allocation in cloud-edge collaboration environ- ment,”Journal of Network and Systems Management, vol. 33, no. 1, p. 6, 2025
2025
-
[34]
Swarm robotics: A review from the swarm engineering perspective,
M. Brambilla, E. Ferrante, M. Birattari, and M. Dorigo, “Swarm robotics: A review from the swarm engineering perspective,”Swarm Intelligence, vol. 7, no. 1, pp. 1–41, 2013
2013
-
[35]
Distributed control of multirobot systems with global connectivity maintenance,
L. Sabattini, C. Secchi, N. Chopra, and A. Gasparri, “Distributed control of multirobot systems with global connectivity maintenance,” IEEE Transactions on Robotics, vol. 29, no. 5, pp. 1326–1332, 2013
2013
-
[36]
A review on representative swarm intelligence algorithms for solving optimization problems: Applications and trends,
J. Tang, G. Liu, and Q. Pan, “A review on representative swarm intelligence algorithms for solving optimization problems: Applications and trends,”IEEE/CAA Journal of Automatica Sinica, vol. 8, no. 10, pp. 1627–1643, 2021
2021
-
[37]
Edgeinfinite: A memory-efficient infinite-context transformer for edge devices,
J. Chen, S. Peng, D. Luo, F. Yang, R. Wu, F. Li, and X. Chen, “Edgeinfinite: A memory-efficient infinite-context transformer for edge devices,” inProceedings of the 63rd Annual Meeting of the Association for Computational Linguistics (Volume 6: Industry Track), 2025, pp. 568–575
2025
-
[38]
A survey on model com- pression for large language models,
X. Zhu, J. Li, Y . Liu, C. Ma, and W. Wang, “A survey on model com- pression for large language models,”Transactions of the Association for Computational Linguistics, vol. 12, pp. 1556–1577, 2024
2024
-
[39]
Energy efficiency maximization in ris-assisted swipt networks with rsma: A ppo-based approach,
R. Zhang, K. Xiong, Y . Lu, P. Fan, D. W. K. Ng, and K. B. Letaief, “Energy efficiency maximization in ris-assisted swipt networks with rsma: A ppo-based approach,”IEEE Journal on Selected Areas in Communications, vol. 41, no. 5, pp. 1413–1430, may 2023. [Online]. Available: https://ieeexplore.ieee.org/document/10032267/
arXiv 2023
-
[40]
R. Wang, Z. Gao, L. Zhang, S. Yue, and Z. Gao, “Empowering large language models to edge intelligence: A survey of edge efficient llms and techniques,”Comput. Sci. Rev., vol. 57, no. C, Aug. 2025. [Online]. Available: https://doi.org/10.1016/j.cosrev.2025.100755
-
[41]
Healthedge: A machine learning-based smart healthcare framework for prediction of type 2 diabetes in an integrated iot, edge, and cloud computing system,
A. Hennebelle, H. Materwala, and L. Ismail, “Healthedge: A machine learning-based smart healthcare framework for prediction of type 2 diabetes in an integrated iot, edge, and cloud computing system,” Procedia Computer Science, vol. 220, pp. 331–338, 2023, the 14th International Conference on Ambient Systems, Networks and Technologies Networks (ANT) and Th...
2023
-
[42]
Edge computing for autonomous driving: Opportunities and challenges,
S. Liu, L. Liu, J. Tang, B. Yu, Y . Wang, and W. Shi, “Edge computing for autonomous driving: Opportunities and challenges,”Proceedings of the IEEE, vol. 107, no. 8, pp. 1697–1716, 2019
2019
-
[43]
Development of CoAP protocol for communication in mobile robotic systems using IoT technique,
C. Sarkar, A. Das, and R. K. Jain, “Development of CoAP protocol for communication in mobile robotic systems using IoT technique,”Scientific Reports, vol. 15, no. 1, 2025. [Online]. Available: https://doi.org/10.1038/s41598-024-76713-2
-
[44]
The use of robots to respond to nuclear accidents: Applying the lessons of the past to the fukushima daiichi nuclear power station,
Y . Yokokohji, “The use of robots to respond to nuclear accidents: Applying the lessons of the past to the fukushima daiichi nuclear power station,”Annual Review of Control, Robotics, and Autonomous Systems, vol. 4, pp. 681–710, 2021
2021
-
[45]
Development and appli- cation of robotics for decommissioning of fukushima daiichi nps by irid,
N. Okuzumi, K. Matsuzaki, and S. Okada, “Development and appli- cation of robotics for decommissioning of fukushima daiichi nps by irid,”Journal of Robotics and Mechatronics, vol. 36, no. 1, pp. 9–20, 2024
2024
-
[46]
Tadokoro,Rescue robotics: DDT project on robots and systems for urban search and rescue
S. Tadokoro,Rescue robotics: DDT project on robots and systems for urban search and rescue. United Kingdom: Springer London, 2009
2009
-
[47]
Multi-agent systems for search and rescue applications,
D. S. Drew, “Multi-agent systems for search and rescue applications,” Current Robotics Reports, vol. 2, pp. 189–200, 2021
2021
-
[48]
Heterogeneous robots coordination for industrial plant inspection and evaluation at world robot summit 2020,
S. Kojima, T. Takahashi, R. Bezerra, T. Nara, M. Takahashi, N. Saiki, K. Gunji, P. Songsuroj, R. Suzuki, K. Sato, Z. Han, K. Takahashi, Y . Okada, M. Watanabe, K. Tadakuma, K. Ohno, and S. Tadokoro, “Heterogeneous robots coordination for industrial plant inspection and evaluation at world robot summit 2020,”Advanced Robotics, 2022
2020
-
[49]
Aerial and ground robot collaboration for autonomous mapping in search and rescue missions,
D. Chatziparaschis, M. G. Lagoudakis, and P. Partsinevelos, “Aerial and ground robot collaboration for autonomous mapping in search and rescue missions,”Drones, vol. 4, no. 4, p. 79, 2020
2020
-
[50]
Anomaly detection in lidar data using virtual and real observations,
K. Hattori, R. Bezerra, S. Kojima, Y . Okada, K. Ohno, S. Ishihara, K. Sawada, and S. Tadokoro, “Anomaly detection in lidar data using virtual and real observations,” in21st International Conference on Advanced Robotics, ICAR 2023, Abu Dhabi, United Arab Emirates, December 5-8, 2023. IEEE, 2023, pp. 191–198. [Online]. Available: https://doi.org/10.1109/IC...
-
[51]
Fog-based edge ai for robotics: Cutting- edge research and future directions,
K. D. Singh and P. D. Singh, “Fog-based edge ai for robotics: Cutting- edge research and future directions,”EAI Endorsed Transactions on AI and Robotics, vol. 2, no. 1, 2023
2023
-
[52]
Edge computing and its application in robotics: A survey,
N. Tahir and R. Parasuraman, “Edge computing and its application in robotics: A survey,”Journal of Sensor and Actuator Networks, vol. 14, no. 4, p. 65, 2025
2025
-
[53]
Multi-feature driven rapid inspection of earthquake- induced damage on building facades using uav-derived point cloud,
Y . Zhanget al., “Multi-feature driven rapid inspection of earthquake- induced damage on building facades using uav-derived point cloud,” Measurement, p. 114679, 2024
2024
-
[54]
Applications of the internet of things (iot) in smart logistics: A comprehensive survey,
Y . Song, F. R. Yu, L. Zhou, X. Yang, and Z. He, “Applications of the internet of things (iot) in smart logistics: A comprehensive survey,” IEEE Internet of Things Journal, vol. 8, no. 6, pp. 4250–4274, 2020. 14
2020
-
[55]
A review of logistics internet-of-things: Current trends and scope for future research,
H. Golpira, S. A. R. Khan, and S. Safaeipour, “A review of logistics internet-of-things: Current trends and scope for future research,”Jour- nal of Industrial Information Integration, vol. 22, p. 100194, 2021
2021
-
[56]
A review of design and control of automated guided vehicle systems,
T. Le-Anh and M. B. M. R. de Koster, “A review of design and control of automated guided vehicle systems,”European Journal of Operational Research, vol. 171, no. 1, pp. 1–23, 2006
2006
-
[57]
Modeling city logistics using adaptive dynamic programming based multi-agent sim- ulation,
N. Firdausiyah, E. Taniguchi, and A. G. Qureshi, “Modeling city logistics using adaptive dynamic programming based multi-agent sim- ulation,”Transportation Research Part E: Logistics and Transportation Review, vol. 125, pp. 74–96, 2019
2019
-
[58]
Industry 4.0: A survey on technologies, applications and open research issues,
Y . Lu, “Industry 4.0: A survey on technologies, applications and open research issues,”Journal of Industrial Information Integration, vol. 6, pp. 1–10, 2017
2017
-
[59]
Towards smart factory for industry 4.0: A self-organized multi-agent system with big data based feedback and coordination,
L. Wang, M. T ¨orngren, and M. Onori, “Towards smart factory for industry 4.0: A self-organized multi-agent system with big data based feedback and coordination,”Computer Networks, vol. 101, pp. 158– 168, 2016
2016
-
[60]
Smart manufacturing systems for industry 4.0: Conceptual frameworks, scenarios, and im- plementation,
P. Zheng, M. Ardolino, A. Bacchettiet al., “Smart manufacturing systems for industry 4.0: Conceptual frameworks, scenarios, and im- plementation,”CIRP Annals, vol. 67, no. 1, pp. 713–736, 2018
2018
-
[61]
Predictive maintenance in the industry 4.0: A systematic literature review,
M. Compare, P. Baraldi, and E. Zio, “Predictive maintenance in the industry 4.0: A systematic literature review,”Computers & Industrial Engineering, vol. 150, p. 106889, 2020
2020
-
[62]
Edge computing and its role in industrial internet: Methodologies, applications, and future directions,
W. Shi, J. Cao, Q. Zhang, Y . Li, and L. Xu, “Edge computing and its role in industrial internet: Methodologies, applications, and future directions,”Information Sciences, vol. 557, pp. 34–65, 2021
2021
-
[63]
A survey on the role of industrial iot in manufacturing for implementation of smart industry,
M. S. Farooq, M. Abdullah, S. Riaz, A. Alvi, F. Rustam, M. A. L´opez Flores, J. Castanedo Gal ´an, M. A. Samad, and I. Ashraf, “A survey on the role of industrial iot in manufacturing for implementation of smart industry,”Sensors, vol. 23, no. 21, p. 8958, 2023
2023
-
[64]
A survey on ai- driven digital twins in industry 4.0: Smart manufacturing and advanced robotics,
Z. Huang, Y . Shen, J. Li, M. Fey, and C. Brecher, “A survey on ai- driven digital twins in industry 4.0: Smart manufacturing and advanced robotics,”Sensors, vol. 21, no. 19, p. 6340, 2021
2021
-
[65]
Survey on human– robot collaboration in industrial settings: Safety, intuitive interfaces and applications,
V . Villani, F. Pini, F. Leali, and C. Secchi, “Survey on human– robot collaboration in industrial settings: Safety, intuitive interfaces and applications,”Mechatronics, vol. 55, pp. 248–266, 2018
2018
-
[66]
A survey of robot learning strategies for human-robot collaboration in industrial settings,
E. Vasey, T. Iqbalet al., “A survey of robot learning strategies for human-robot collaboration in industrial settings,”Robotics and Computer-Integrated Manufacturing, vol. 73, p. 102231, 2022
2022
-
[67]
Smart manufacturing: Past research, present findings, and future directions,
H. Kang, J. Lee, S. W. Yoon, and H. Yoon, “Smart manufacturing: Past research, present findings, and future directions,”International Journal of Precision Engineering and Manufacturing-Green Technology, vol. 3, no. 1, pp. 111–128, 2016
2016
-
[68]
Heterogeneous multi- robot task scheduling heuristics for garment mass customization,
R. Bezerra, K. Ohno, S. Kojima, H. A. Aryadi, K. Gunji, M. Kuwa- hara, Y . Okada, M. Konyo, and S. Tadokoro, “Heterogeneous multi- robot task scheduling heuristics for garment mass customization,” in 2022 IEEE 18th International Conference on Automation Science and Engineering (CASE), 2022, pp. 439–446
2022
-
[69]
——, “Heterogeneous multi-robot task allocation for garment transformable production using deep reinforcement learning,” in 19th IEEE International Conference on Automation Science and Engineering, CASE 2023, Auckland, New Zealand, August 26- 30, 2023. IEEE, 2023, pp. 1–8. [Online]. Available: https: //doi.org/10.1109/CASE56687.2023.10260437
-
[70]
Artificial intelligence in health care: Applications and legal issues,
W. N. Price II, “Artificial intelligence in health care: Applications and legal issues,”The SciTech Lawyer, 2017
2017
-
[71]
An introduction to patterns for the internet of robotic things in the ambient assisted living scenario,
B. And `o, L. Cantelli, V . Catania, R. Crispino, D. C. Guastella, S. Mon- teleone, and G. Muscato, “An introduction to patterns for the internet of robotic things in the ambient assisted living scenario,”Robotics, vol. 10, no. 2, p. 56, 2021
2021
-
[72]
Health monitoring and manage- ment using internet-of-things (iot) sensing with cloud-based processing: Opportunities and challenges,
M. Hassanalieragh, A. Page, T. Soyata, G. Sharma, M. Aktas, G. Ma- teos, B. Kantarci, and S. Andreescu, “Health monitoring and manage- ment using internet-of-things (iot) sensing with cloud-based processing: Opportunities and challenges,” in2015 IEEE International Conference on Services Computing, 2015, pp. 285–292
2015
-
[73]
Semantic mapping for mobile robotics tasks: A survey,
I. Kostavelis and A. Gasteratos, “Semantic mapping for mobile robotics tasks: A survey,”Robotics and Autonomous Systems, vol. 66, pp. 86– 103, 2015
2015
-
[74]
Deep learning in controlled environment agri- culture: A review of recent advancements, challenges and prospects,
M. O. Ojo and A. Zahid, “Deep learning in controlled environment agri- culture: A review of recent advancements, challenges and prospects,” Sensors, vol. 22, no. 20, p. 7965, 2022
2022
-
[75]
Sensor planning for a symbiotic UA V and UGV system for precision agriculture,
P. Tokekar, J. Vander Hook, D. J. Mulla, and V . Isler, “Sensor planning for a symbiotic UA V and UGV system for precision agriculture,” in 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2013, pp. 5321–5326
2013
-
[76]
The iot and ai in agriculture: The time is now— a systematic review of smart sensing technologies,
M. Krawczyket al., “The iot and ai in agriculture: The time is now— a systematic review of smart sensing technologies,”Sensors, vol. 25, no. 12, p. 3583, 2025
2025
-
[77]
T. D. D. Le, H. P. T. Nguyen, M. T. Nguyen, B. N. M. Le, K. K. Dang, P. Q. Ha, T. V . T. Nguyen, and H. Q. Nguyen, “Exploring new frontiers: Current status and future research directions for aiot application in shrimp farming in the vietnamese mekong delta,”Aquacultural Engineering, vol. 111, 2025. [Online]. Available: https://doi.org/10.1016/j.aquaeng.20...
-
[78]
Artificial intelligence of things (aiot) advances in aquaculture: A review,
Y .-P. Huang and S. P. Khabusi, “Artificial intelligence of things (aiot) advances in aquaculture: A review,”Processes, vol. 13, no. 1, p. 73, 2025
2025
-
[79]
J. P. G. Carvalho, R. Bezerra, R. de Andrade Lira Rabelo, and J. P. S. D. Monte, “Enhancing agricultural iot networks: Multi-robot wireless charging task allocation through reinforcement learning,” in Latin American Robotics Symposium, LARS 2024, Arequipa, Peru, November 11-14, 2024. IEEE, 2024, pp. 1–6. [Online]. Available: https://doi.org/10.1109/LARS64...
-
[80]
Implementing wireless charging system for semi- autonomous agricultural robots,
A. Bodian, A. Cardenas, D. Ouardani, J. Ouakrim, and A. Bennani- Ben Abdelghani, “Implementing wireless charging system for semi- autonomous agricultural robots,”Energies, vol. 18, no. 17, p. 4624, 2025
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.