Physics-Informed Modeling and Control of Emergent Behaviors in Robot Swarms
Pith reviewed 2026-06-28 14:44 UTC · model grok-4.3
The pith
PhySwarm couples macroscopic density models to microscopic robot motions to generate multi-stage emergent swarm behaviors.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
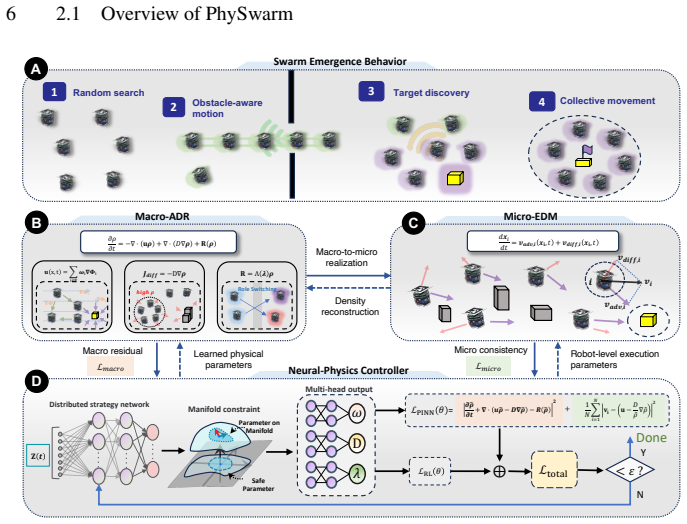
PhySwarm represents multi-stage swarm emergence as physically constrained density-field evolution coupled to executable robot motion. At the macroscopic level, a multi-phase advection-diffusion-reaction model describes phase-dependent swarm-density evolution through directed transport, diffusion-based spatial regulation and behavioral phase transitions. At the microscopic level, an equivalent deterministic motion model realizes these mechanisms through potential-field advection, density-gradient compensation and rate- or event-gated phase switching. A neural-physics controller maps local observations and temporal memory to bounded physical parameters and is trained with a reinforcement learn
What carries the argument
The neural-physics controller that maps local observations to physical parameters of the coupled Macro-ADR density model and Micro-EDM motion model, trained under a combined task-reward and physics-residual objective.
If this is right
- Distinct multi-stage emergent behaviors become generatable inside one physics-informed framework for missions including foraging, navigation and search-and-rescue.
- Learned density fields directly show how advection, diffusion and reaction regulate swarm organization across phases.
- Control occurs through adjustment of bounded physical parameters rather than abstract policy outputs.
- The same training objective enforces both task performance and consistency between density predictions and robot trajectories.
Where Pith is reading between the lines
- If the macro-micro equivalence holds under the stated constraints, the framework could be tested on swarms whose size makes full microscopic simulation impractical.
- The method points toward blending reinforcement learning with explicit density-equation residuals in other multi-agent systems that exhibit behavioral phase changes.
- A direct next measurement would compare the controller's density predictions against observed robot distributions in environments that differ from the training missions.
Load-bearing premise
The macroscopic multi-phase advection-diffusion-reaction model is equivalent to the microscopic deterministic motion model, and the neural controller can be trained to satisfy task rewards together with macro density residuals and micro motion constraints at the same time.
What would settle it
A controlled swarm simulation or robot experiment in which the executed motions produce density fields that deviate measurably from the Macro-ADR equations while the controller is active, or in which micro-scale trajectories fail to reproduce the expected macro-scale density evolution.
Figures
read the original abstract
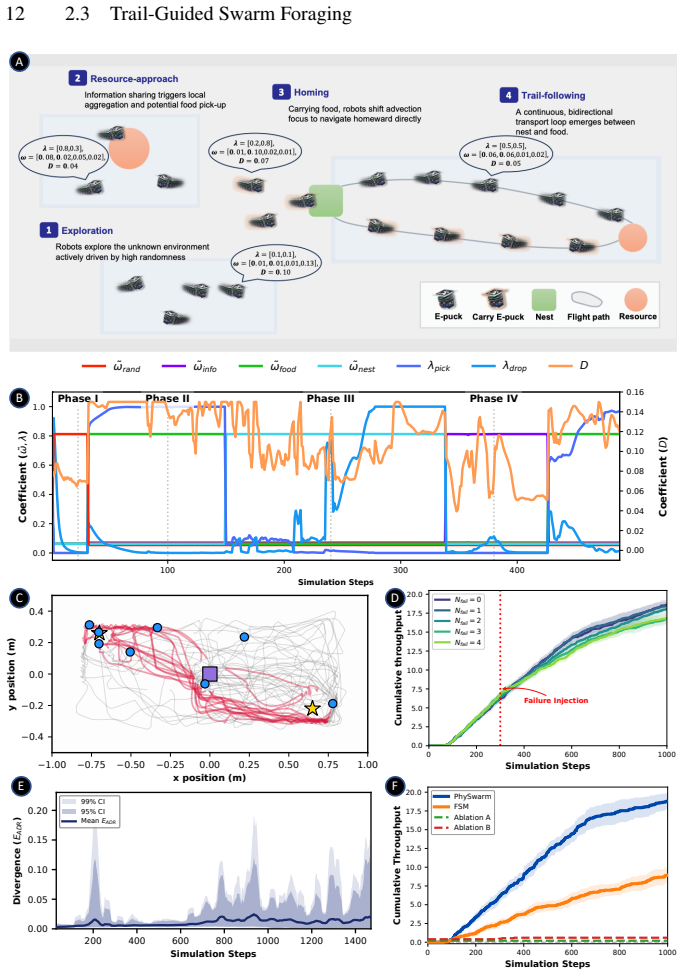
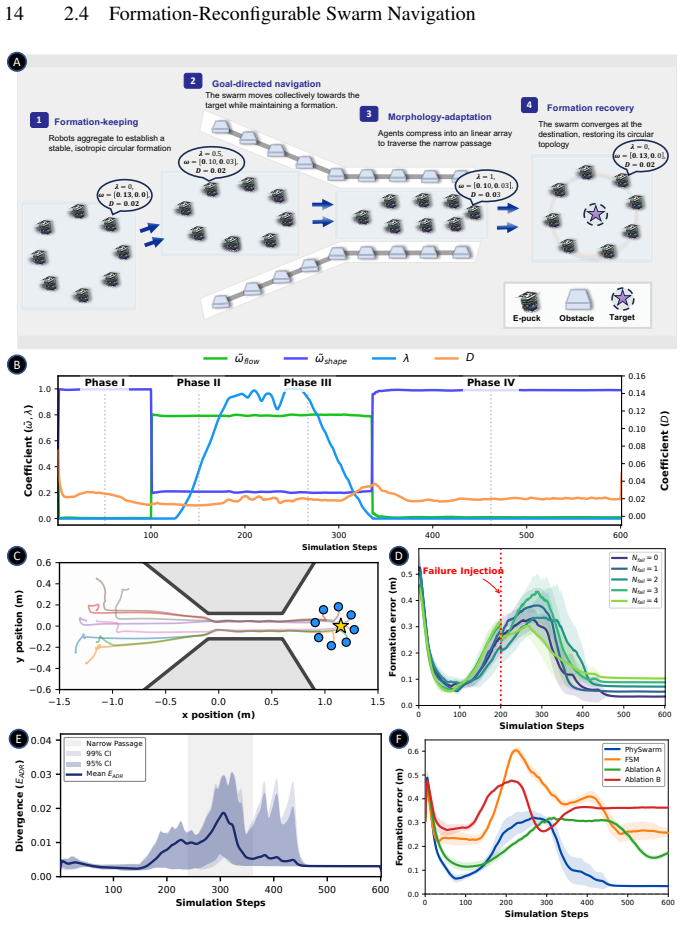
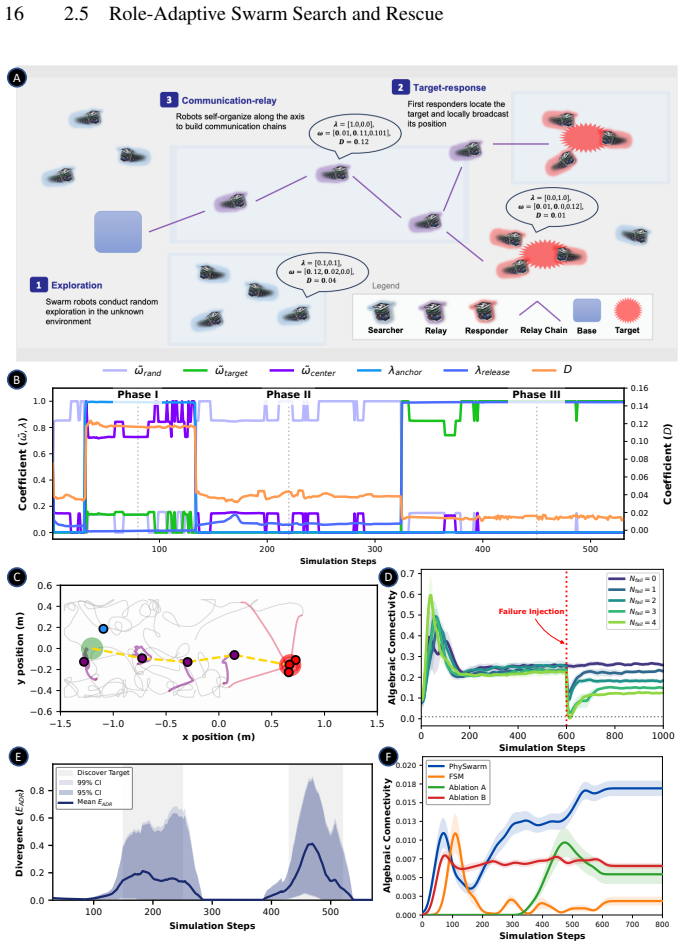
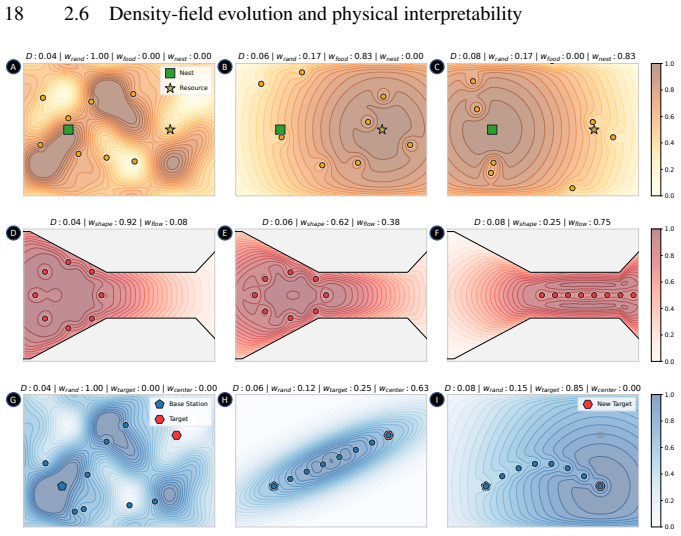
Robot swarms can exhibit coherent collective behaviors through local perception, limited communication and decentralized decision-making, yet modeling and controlling such emergence remains challenging when behaviors unfold over multiple phases. Here we introduce PhySwarm, a physics-informed micro--macro framework that represents multi-stage swarm emergence as physically constrained density-field evolution coupled to executable robot motion. At the macroscopic level, a multi-phase advection--diffusion--reaction model (Macro-ADR) describes phase-dependent swarm-density evolution through directed transport, diffusion-based spatial regulation and behavioral phase transitions. At the microscopic level, an equivalent deterministic motion model (Micro-EDM) realizes these mechanisms through potential-field advection, density-gradient compensation and rate- or event-gated phase switching. A neural-physics controller (NPC) maps local observations and temporal memory to bounded physical parameters, and is trained with a reinforcement learning--PINN objective that combines task rewards with macro-scale density residuals and micro-scale motion-consistency constraints. In several proof-of-concept swarm missions -- including trail-guided foraging, formation-reconfigurable navigation and role-adaptive search and rescue -- we demonstrate that PhySwarm can generate distinct multi-stage emergent behaviors within a unified physics-informed modeling framework. The learned density fields and physical parameters provide interpretable evidence of how advection, diffusion and reaction jointly regulate multi-stage swarm organization. These results establish a physics-informed route for learning, interpreting and controlling emergent behaviors in robot swarms.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces PhySwarm, a physics-informed micro-macro framework for modeling and controlling multi-stage emergent behaviors in robot swarms. It defines a macroscopic multi-phase advection-diffusion-reaction (Macro-ADR) model for phase-dependent density evolution and claims an equivalent microscopic deterministic motion model (Micro-EDM) realized via potential-field advection, density-gradient compensation, and phase switching. A neural-physics controller (NPC) is trained with an RL-PINN objective combining task rewards, macro density residuals, and micro motion-consistency constraints. The framework is demonstrated in proof-of-concept missions including trail-guided foraging, formation-reconfigurable navigation, and role-adaptive search and rescue, with claims that it generates distinct multi-stage behaviors and provides interpretable evidence of how advection, diffusion, and reaction regulate swarm organization.
Significance. If the micro-macro equivalence holds and the demonstrations succeed with verifiable consistency between models, the work would provide a unified physics-informed approach to swarm emergence that links executable robot motion to macroscopic density fields, offering interpretability through learned physical parameters. The attempt to enforce both macro residuals and micro constraints simultaneously in the NPC objective is a notable technical direction for the field.
major comments (1)
- [Macro-ADR / Micro-EDM equivalence (model definitions and NPC objective)] The central claim requires that deterministic Micro-EDM trajectories produce density evolution exactly matching the multi-phase Macro-ADR PDEs. No mean-field limit, moment closure, or explicit derivation establishing this equivalence for finite-N multi-stage cases is provided. This is load-bearing because the NPC training objective uses macro-scale density residuals from Macro-ADR; without the match, the residuals are inconsistent with actual micro trajectories, undermining simultaneous satisfaction of task rewards and both constraint sets.
minor comments (1)
- [Abstract and demonstration sections] The abstract and demonstrations section refer to 'proof-of-concept' results but lack quantitative metrics, error bars, ablation studies, or baseline comparisons that would allow verification of the multi-stage behavior claims.
Simulated Author's Rebuttal
We thank the referee for the constructive review and for highlighting the importance of rigorously establishing the micro-macro equivalence. We respond to the major comment below and indicate the planned revisions.
read point-by-point responses
-
Referee: [Macro-ADR / Micro-EDM equivalence (model definitions and NPC objective)] The central claim requires that deterministic Micro-EDM trajectories produce density evolution exactly matching the multi-phase Macro-ADR PDEs. No mean-field limit, moment closure, or explicit derivation establishing this equivalence for finite-N multi-stage cases is provided. This is load-bearing because the NPC training objective uses macro-scale density residuals from Macro-ADR; without the match, the residuals are inconsistent with actual micro trajectories, undermining simultaneous satisfaction of task rewards and both constraint sets.
Authors: We agree that the manuscript does not contain an explicit mean-field limit derivation, moment closure, or formal proof of equivalence between the deterministic Micro-EDM trajectories and the Macro-ADR PDEs for finite-N multi-stage cases. The Micro-EDM is defined by direct correspondence to the advection, diffusion, and reaction terms of Macro-ADR (potential-field advection, density-gradient compensation, and gated phase switching), and numerical simulations in the proof-of-concept missions show matching density evolution. Nevertheless, the absence of a derivation leaves the load-bearing claim under-supported. In the revised manuscript we will add a new subsection (and supplementary material) that (i) states the modeling assumptions, (ii) sketches a mean-field analysis for large but finite N with appropriate scaling, and (iii) provides additional numerical verification that the macro residuals remain consistent with realized micro trajectories under those assumptions. This will also clarify how the revised derivation justifies the combined objective used to train the NPC. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper defines PhySwarm via a modeling choice that couples a multi-phase Macro-ADR PDE description to an asserted-equivalent Micro-EDM motion model, then trains an NPC via an RL-PINN objective mixing task rewards with density and motion residuals. No quoted equation or self-citation reduces any central prediction or equivalence claim to a fitted input by construction; the macro-micro link is presented as a design premise rather than a derived result that loops back on itself. The framework remains self-contained against external benchmarks and does not rely on load-bearing self-citations or ansatzes smuggled from prior author work.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
K. Elamvazhuthi, H.J. Kuiper, M. Kawski, S. Berman, Bilinear controllability of a class of advection–diffusion–reaction systems. IEEE Transactions on Auto- matic Control64(6), 2282–2297 (2019). https://doi.org/10.1109/TAC.2018. 2885482
-
[2]
C. Zhu, G. Yin, On strong feller, recurrence, and weak stabilization of regime- switching diffusions. SIAM Journal on Control and Optimization48(3), 2003– 2031 (2009). https://doi.org/10.1137/080712532
-
[3]
C. Zhu, G. Yin, Asymptotic properties of hybrid diffusion systems. SIAM Jour- nal on Control and Optimization46(4), 1155–1179 (2007). https://doi.org/10. 1137/060649343
2007
-
[4]
E.F. Keller, L.A. Segel, Model for chemotaxis. Journal of Theoretical Biology 30(2), 225–234 (1971). https://doi.org/10.1016/0022-5193(71)90050-6
-
[5]
Stewart, Generation of analytic semigroups by strongly elliptic oper- ators under general boundary conditions
H.B. Stewart, Generation of analytic semigroups by strongly elliptic oper- ators under general boundary conditions. Transactions of the Ameri- can Mathematical Society259(1), 299–310 (1980). https://doi.org/10.1090/ S0002-9947-1980-0561239-X
1980
-
[6]
The discrete and continuous brain: From decisions to movement—and back again,
E. Seabrook, L. Wiskott, A tutorial on the spectral theory of markov chains. Neural Computation35(11), 1713–1796 (2023). https://doi.org/10.1162/neco a 01611 100 S3.1 Emergent Behavior v.s. Collective Behavior
-
[7]
Giovangigli, Multicomponent flow modeling
V . Giovangigli, Multicomponent flow modeling. Science China Mathematics 55(2), 285–308 (2012). https://doi.org/10.1007/s11425-011-4346-y
-
[8]
Y . Sun, A.S. Jayaraman, G.S. Chirikjian, Lie group solutions of advection- diffusion equations. Physics of Fluids33(4), 046,604 (2021). https://doi.org/ 10.1063/5.0048467
-
[9]
Chandrasekhar, Stochastic problems in physics and astronomy
S. Chandrasekhar, Stochastic problems in physics and astronomy. Rev. Mod. Phys.15, 1–89 (1943). https://doi.org/10.1103/RevModPhys.15.1
-
[10]
Cosner, Reaction-diffusion-advection models for the effects and evolution of dispersal
C. Cosner, Reaction-diffusion-advection models for the effects and evolution of dispersal. Discrete and Continuous Dynamical Systems34(5), 1701–1745 (2014). https://doi.org/10.3934/dcds.2014.34.1701
-
[11]
Philibert, One and a half century of diffusion: Fick, Einstein, before and beyond
J. Philibert, One and a half century of diffusion: Fick, Einstein, before and beyond. Diffusion Fundamentals4, 6.1–6.19 (2006). https://doi.org/10.62721/ diffusion-fundamentals.4.39
2006
-
[12]
E. Rimon, D.E. Koditschek, Exact robot navigation using artificial potential functions. IEEE Transactions on Robotics and Automation8(5), 501–518 (1992). https://doi.org/10.1109/70.163777
-
[13]
Olfati-Saber, Flocking for multi-agent dynamic systems: Algorithms and theory
R. Olfati-Saber, Flocking for multi-agent dynamic systems: Algorithms and theory. IEEE Transactions on Automatic Control51(3), 401–420 (2006). https://doi.org/10.1109/TAC.2005.864190
-
[14]
M.J. Box, A comparison of several current optimization methods, and the use of transformations in constrained problems. The Computer Journal9(1), 67–77 (1966). https://doi.org/10.1093/comjnl/9.1.67
-
[15]
M. Alizadeh, H. Tabassum, Power control with qos guarantees: A differentiable projection-based unsupervised learning framework. IEEE Transactions on Communications71(8), 4605–4619 (2023). https://doi.org/10.1109/TCOMM. 2023.3282220
-
[16]
K.N. Chueh, C.C. Conley, J.A. Smoller, Positively invariant regions for systems of nonlinear diffusion equations. Indiana University Mathematics Journal26(3), 373–392 (1977). https://doi.org/10.2969/iumj/1977.26.26028
-
[17]
B. Dacorogna, J. Moser, On a partial differential equation involving the jacobian determinant. Annales de l’Institut Henri Poincar ´e C, Analyse Non Lin ´eaire 7(1), 1–26 (1990). https://doi.org/10.1016/S0294-1449(16)30307-9
-
[18]
Approximation by superpositions of a sigmoidal function.Math
G. Cybenko, Approximation by superpositions of a sigmoidal function. Math- ematics of Control, Signals and Systems2(4), 303–314 (1989). https://doi.org/ 10.1007/BF02551274 S3 SUPPLEMENTARY NOTE 101
-
[19]
5, 359–366,https: //doi.org/10.1016/0893-6080(89)90020-8
K. Hornik, M. Stinchcombe, H. White, Multilayer feedforward networks are universal approximators. Neural Networks2(5), 359–366 (1989). https://doi. org/10.1016/0893-6080(89)90020-8
-
[20]
Botev, J.F
Z.I. Botev, J.F. Grotowski, D.P. Kroese, Kernel density estimation via diffusion. The Annals of Statistics38(5), 2916 – 2957 (2010). https://doi.org/10.1214/ 10-AOS799
2010
-
[21]
M. Arulampalam, S. Maskell, N. Gordon, T. Clapp, A tutorial on particle fil- ters for online nonlinear/non-gaussian bayesian tracking. IEEE Transactions on Signal Processing50(2), 174–188 (2002). https://doi.org/10.1109/78.978374
-
[22]
J. Schulman, F. Wolski, P. Dhariwal, A. Radford, O. Klimov, Proximal policy optimization algorithms. arXiv (2017). https://doi.org/10.48550/arXiv.1707. 06347
-
[23]
C. Yu, A. Velu, E. Vinitsky, J. Gao, Y . Wang, A.M. Bayen, Y . Wu, The surprising effectiveness of PPO in cooperative multi-agent games. Advances in Neural Information Processing Systems35, 24,611–24,624 (2022). https://doi.org/10. 5555/3600270.3602057
arXiv 2022
-
[24]
Physics-informed machine learning
G.E. Karniadakis, I.G. Kevrekidis, L. Lu, P. Perdikaris, S. Wang, L. Yang, Physics-informed machine learning. Nature Reviews Physics3, 422–440 (2021). https://doi.org/10.1038/s42254-021-00314-5
-
[25]
Bottou, F.E
L. Bottou, F.E. Curtis, J. Nocedal, Optimization methods for large-scale machine learning. SIAM Review60(2), 223–311 (2018). https://doi.org/10. 1137/16M1080173
2018
-
[26]
S. Kitamura, S. Nakagiri, Identifiability of spatially-varying and constant parameters in distributed systems of parabolic type. SIAM Journal on Control and Optimization15(5), 785–802 (1977). https://doi.org/10.1137/0315050
-
[27]
S. Mishra, R. Molinaro, Estimates on the generalization error of physics- informed neural networks for approximating a class of inverse problems for pdes. IMA Journal of Numerical Analysis42(2), 981–1022 (2022). https: //doi.org/10.1093/imanum/drab032
-
[28]
Estimates on the generalization error of physics-informed neural networks for approximating pdes
S. Mishra, R. Molinaro, Estimates on the generalization error of physics- informed neural networks for approximating pdes. IMA Journal of Numerical Analysis43(1), 1–43 (2023). https://doi.org/10.1093/imanum/drab093
-
[29]
S. Ghadimi, G. Lan, Stochastic first- and zeroth-order methods for nonconvex stochastic programming. SIAM Journal on Optimization23(4), 2341–2368 (2013). https://doi.org/10.1137/120880811 102 S3.1 Emergent Behavior v.s. Collective Behavior
-
[30]
M. Raissi, P. Perdikaris, G.E. Karniadakis, Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. Journal of Computational Physics378, 686–707 (2019). https://doi.org/10.1016/j.jcp.2018.10.045
-
[31]
A.G. Millard, R. Joyce, J.A. Hilder, C. Fles ,eriu, L. Newbrook, W. Li, L.J. McDaid, D.M. Halliday, The Pi-puck extension board: A Raspberry Pi interface for the e-puck robot platform. IEEE/RSJ International Conference on Intelli- gent Robots and Systems (IROS) pp. 741–748 (2017). https://doi.org/10.1109/ IROS.2017.8202233
arXiv 2017
-
[32]
O. Michel, Cyberbotics Ltd. Webots™: Professional mobile robot simulation. International Journal of Advanced Robotic Systems1(1), 39–42 (2004). https: //doi.org/10.5772/5618
-
[33]
S. Macenski, T. Foote, B. Gerkey, C. Lalancette, W. Woodall, Robot operating system 2: Design, architecture, and uses in the wild. Science Robotics7(66), eabm6074 (2022). https://doi.org/10.1126/scirobotics.abm6074
-
[34]
Y . Cai, Y . Shen, An integrated localization and control framework for multi- agent formation. IEEE Transactions on Signal Processing67(7), 1941–1956 (2019). https://doi.org/10.1109/TSP.2019.2897968
-
[35]
Fiedler, Algebraic connectivity of graphs
M. Fiedler, Algebraic connectivity of graphs. Czechoslovak Mathematical Journal23(2), 298–305 (1973). https://doi.org/10.21136/CMJ.1973.101168
-
[36]
de Abreu, Old and new results on algebraic connectivity of graphs
N.M.M. de Abreu, Old and new results on algebraic connectivity of graphs. Linear Algebra and its Applications423(1), 53–73 (2007). https://doi.org/10. 1016/j.laa.2006.08.017
2007
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.