KDH-CAD: Knowledge-data hybrid CAD learning under data scarcity
Pith reviewed 2026-06-28 12:11 UTC · model grok-4.3
The pith
CAD classification reaches over 92 percent accuracy with only 250 labeled samples by completing missing concepts in foundation models using textbook domain knowledge and calibrating them with minimal data.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
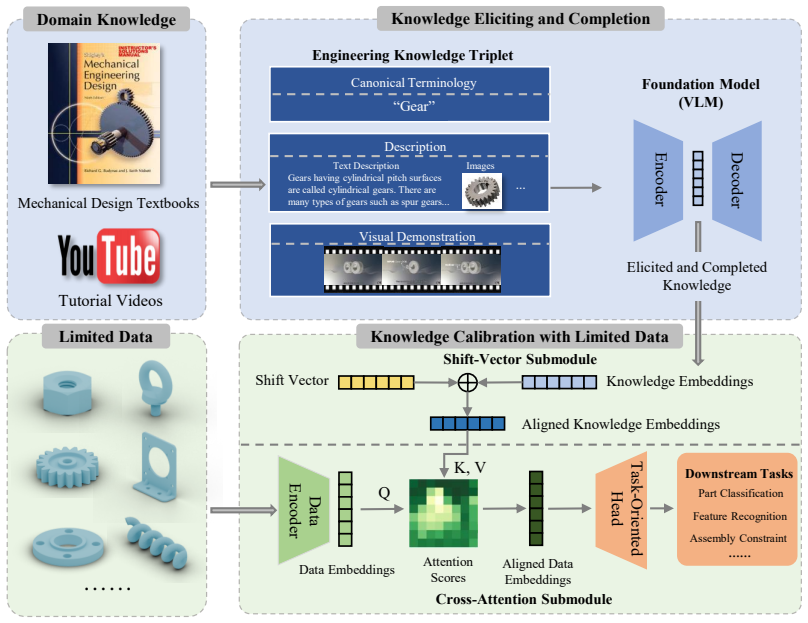
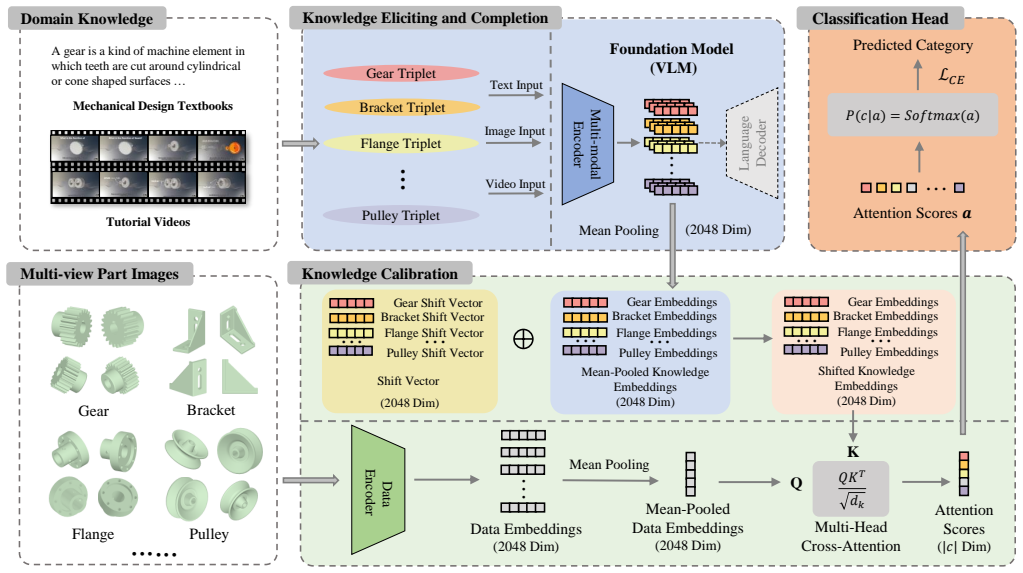
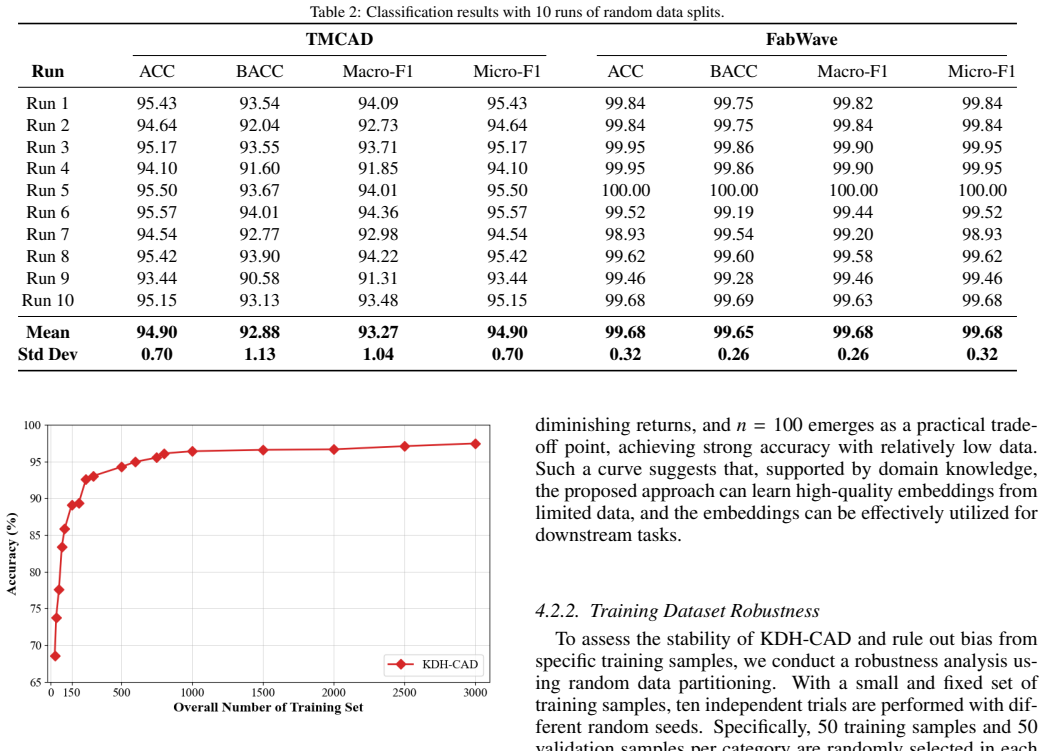
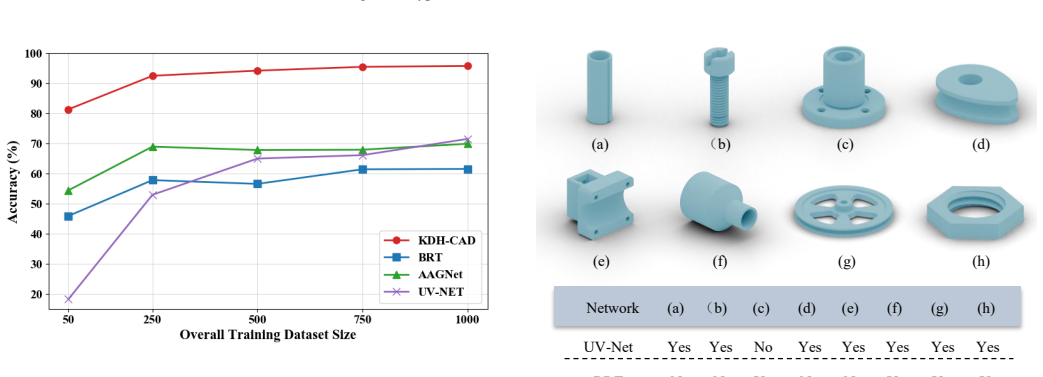
KDH-CAD integrates pretrained foundation models, structured domain knowledge from textbooks and tutorials, and a very small amount of labeled CAD data. Domain knowledge elicits and completes CAD-relevant concepts that are weakly expressed or under-represented in the foundation models, while the labeled data calibrates these concepts in the latent space to account for task-specific geometric variability without fine-tuning the foundation model. On real-world mechanical part classification the method reaches 92.6 percent accuracy with 250 training samples and 95.8 percent with 1,000 samples, continuing to improve as more data is added and matching or exceeding state-of-the-art performance that
What carries the argument
The KDH-CAD framework, which uses structured domain knowledge to complete CAD concepts in pretrained foundation models and then calibrates those concepts in latent space with a small labeled set without any model fine-tuning.
If this is right
- CAD systems can reach competitive performance in low-data regimes that were previously considered impractical.
- Performance scales upward as additional labeled samples become available rather than plateauing early.
- Reliance on large-scale authentic or synthetic CAD datasets can be substantially reduced while preserving or exceeding prior accuracy levels.
- The same knowledge-completion step can be reused across multiple CAD tasks without retraining the underlying foundation model each time.
Where Pith is reading between the lines
- The method could be tested on other CAD tasks such as retrieval or generative modeling to check whether the same calibration step transfers without task-specific redesign.
- If textbook knowledge proves sufficient for many sub-domains, practitioners may shift effort from dataset curation toward systematic extraction and structuring of existing engineering documentation.
- Because calibration occurs only in latent space, the foundation model remains available for zero-shot or few-shot use on related but unseen CAD problems.
- Similar hybrid completion-plus-calibration patterns may apply to other engineering domains that already possess extensive textbook literature but face data-collection bottlenecks.
Load-bearing premise
Domain knowledge from textbooks and tutorials can reliably elicit and complete CAD-relevant concepts that are weakly expressed in pretrained foundation models, and a very small labeled set can then calibrate those concepts for task-specific geometry without needing to fine-tune the model.
What would settle it
An experiment in which adding the textbook-derived domain knowledge produces no accuracy gain over the foundation model alone on the same 250-sample mechanical-part classification task, or in which the hybrid method falls below 80 percent accuracy while requiring fine-tuning to reach higher numbers.
Figures

read the original abstract
Deep learning in computer-aided design (CAD) remains fundamentally constrained by the data scarcity challenge: authentic CAD data is difficult to collect at scale, while synthetic data may not faithfully reflect real design practice. Rather than pursuing ever-larger CAD datasets, this paper alternatively treats CAD learning as a knowledge completion and calibration problem. It introduces KDH-CAD, a knowledge-data hybrid framework that integrates pretrained knowledge in foundation models, structured domain knowledge from textbooks/tutorials, and a very small amount of labeled CAD data. Domain knowledge is used to elicit and complete CAD-relevant concepts that are weakly expressed or under-represented in pretrained foundation models, while labeled CAD data calibrates these concepts in the latent space to account for task-specific geometric variability, without fine-tuning the foundation model. Experiments on real-world mechanical part classification show that KDH-CAD achieves strong performance in low-data regimes, reaching 92.6\% accuracy with only 250 training samples, 95.8\% with 1,000 samples, and continuing to improve with additional data. This matches or exceeds state-of-the-art performance that typically requires an order of magnitude more data. These results suggest that combining pretrained foundation models with structured domain knowledge can substantially reduce reliance on large-scale CAD datasets, providing a principled and practical direction for data-efficient CAD learning.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces KDH-CAD, a knowledge-data hybrid framework for CAD learning under data scarcity. It integrates pretrained foundation models with structured domain knowledge from textbooks/tutorials to elicit and complete CAD-relevant concepts, then uses a very small amount of labeled CAD data solely for latent-space calibration (without fine-tuning the foundation model). On real-world mechanical part classification, it reports 92.6% accuracy with 250 training samples and 95.8% with 1,000 samples, matching or exceeding state-of-the-art methods that require substantially more data.
Significance. If the empirical results are robust, the work offers a practical route to data-efficient CAD learning by treating the problem as knowledge completion and calibration rather than dataset scaling. This could reduce dependence on large authentic or synthetic CAD corpora and broaden applicability in domains where data collection is costly.
major comments (1)
- [Abstract] Abstract: the central empirical claim (92.6% accuracy at 250 samples, 95.8% at 1,000 samples, matching SOTA with an order of magnitude less data) is presented without any description of the dataset, baselines, implementation of the knowledge-elicitation or calibration steps, or error analysis. These details are load-bearing for evaluating whether the reported numbers support the hybrid-framework thesis.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and recommendation for major revision. We agree that the abstract would benefit from additional context to better support the central claims. We address the single major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central empirical claim (92.6% accuracy at 250 samples, 95.8% at 1,000 samples, matching SOTA with an order of magnitude less data) is presented without any description of the dataset, baselines, implementation of the knowledge-elicitation or calibration steps, or error analysis. These details are load-bearing for evaluating whether the reported numbers support the hybrid-framework thesis.
Authors: We acknowledge the validity of this observation. The current abstract prioritizes the high-level thesis and results but omits key experimental context. In the revised manuscript we will expand the abstract (while preserving length constraints) to briefly specify: the real-world mechanical part classification dataset; the SOTA baselines requiring substantially more data; the knowledge-elicitation procedure that extracts and completes CAD concepts from textbooks/tutorials within pretrained foundation models; the latent-space calibration step performed with 250–1,000 labeled samples without any foundation-model fine-tuning; and that detailed error analysis appears in the experiments section. These additions will make the empirical claims more self-contained and directly address the referee’s concern. revision: yes
Circularity Check
No significant circularity
full rationale
The paper presents KDH-CAD as an empirical hybrid framework that elicits CAD concepts from domain knowledge to supplement foundation models and calibrates them with minimal labeled data for latent-space adjustment without fine-tuning. Performance figures (92.6% at 250 samples, 95.8% at 1,000 samples) are reported as measured experimental outcomes on real-world mechanical part classification, not as quantities defined by or fitted to the framework itself. No equations, self-referential definitions, fitted-input predictions, or load-bearing self-citations appear in the abstract or described central claim that would reduce the result to its inputs by construction. The derivation chain is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Pretrained foundation models contain CAD-relevant concepts that can be elicited and completed using structured domain knowledge from textbooks and tutorials.
- domain assumption A very small amount of labeled CAD data suffices to calibrate the elicited concepts in latent space for task-specific geometric variability.
Reference graph
Works this paper leans on
-
[1]
Zou, H.-Y
Q. Zou, H.-Y . Feng, S. Gao, Variational direct modeling: A framework towards integration of parametric modeling and direct modeling in cad, Computer-Aided Design 157 (2023) 103465
2023
-
[2]
P. K. Jayaraman, A. Sanghi, J. G. Lambourne, K. D. D. Willis, T. Davies, H. Shayani, N. Morris, UV-Net: Learning from boundary representations, in: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021, pp. 11698–11707
2021
-
[3]
Q. Zou, Y . Wu, Z. Liu, W. Xu, S. Gao, Intelligent cad 2.0, Visual Infor- matics 8 (2024) 1–12
2024
-
[4]
S. Koch, A. Matveev, Z. Jiang, F. Williams, A. Artemov, E. Burnaev, M. Alexa, D. Zorin, D. Panozzo, ABC: A big CAD model dataset for geometric deep learning, in: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2019, pp. 9601–9611
2019
-
[5]
A. Seff, Y . Ovadia, W. Zhou, R. P. Adams, SketchGraphs: A large-scale dataset for modeling relational geometry in computer-aided design, in: ICML 2020 Workshop on Object-Oriented Learning, 2020
2020
-
[6]
Ganin, et al., Computer-aided design as language, in: Advances in Neural Information Processing Systems, 2021, pp
Y . Ganin, et al., Computer-aided design as language, in: Advances in Neural Information Processing Systems, 2021, pp. 5885–5897
2021
-
[7]
J. Zhou, J. D. Camba, P. Company, CADialogue: A multimodal LLM- powered conversational assistant for intuitive parametric CAD modeling, Computer-Aided Design 191 (2026) 104006
2026
-
[8]
S. Bai, Y . Cai, R. Chen, et al., Qwen3-vl technical report, arXiv preprint arXiv:2511.21631
work page internal anchor Pith review Pith/arXiv arXiv
-
[9]
Fluid Sealing Association, European Sealing Association, Gasket Hand- book: Principles and Practices, Fluid Sealing Association and European Sealing Association, 2017
2017
-
[10]
Q. Zou, L. Zhu, J. Wu, Z. Yang, Splinegen: Approximating unorganized points through generative ai, Computer-Aided Design 178 (2025) 103809
2025
-
[11]
Alrashedy, et al., Generating CAD code with vision-language models for 3D designs, in: International Conference on Learning Representation, 2025, pp
K. Alrashedy, et al., Generating CAD code with vision-language models for 3D designs, in: International Conference on Learning Representation, 2025, pp. 52236–52262
2025
-
[12]
X. Li, Y . Sun, Z. Sha, LLM4CAD: Multi-modal large language models for 3D computer-aided design generation, in: International Design Engi- neering Technical Conferences and Computers and Information in Engi- neering Conference, V ol. 84007, 2024, p. V010T03A003
2024
-
[13]
Tang, Xiao, et al., ChatCAD: An MLLM-guided framework for zero- shot CAD drawing restoration, in: IEEE International Conference on Acoustics, Speech and Signal Processing, 2025, pp
J. Tang, Xiao, et al., ChatCAD: An MLLM-guided framework for zero- shot CAD drawing restoration, in: IEEE International Conference on Acoustics, Speech and Signal Processing, 2025, pp. 1–5
2025
-
[14]
Zhang, S
Z. Zhang, S. Sun, W. Wang, D. Cai, J. Bian, FlexCAD: Unified and versa- tile controllable CAD generation with fine-tuned large language models, in: International Conference on Learning Representations, 2025
2025
-
[15]
Y . Yuan, S. Sun, Q. Liu, J. Bian, CAD-Editor: A locate-then-infill frame- work with automated training data synthesis for text-based CAD editing, Proceedings of the International Conference on Machine Learning
-
[16]
R. Wang, Y . Yuan, S. Sun, J. Bian, Text-to-cad generation through infus- ing visual feedback in large language models, in: Proceedings of the In- ternational Conference on Machine Learning, V ol. 267, 2025, pp. 65326– 65345
2025
-
[17]
M. Mews, A. Aynetdinov, V . Schiller, P. Eisert, A. Akbik, Don’t Mesh with Me: Generating constructive solid geometry instead of meshes by fine-tuning a code-generation LLM, in: CVPR 2025 Workshop on AI for Content Creation, 2025
2025
-
[18]
X. Li, Y . Sun, Z. Sha, Llm4cad: Multimodal large language models for three-dimensional computer-aided design generation, Journal of Comput- ing and Information Science in Engineering 25 (2024) 021005
2024
-
[19]
H. Wu, R. Lei, Y . Peng, L. Gao, AAGNet: A graph neural network to- wards multi-task machining feature recognition, Robotics and Computer- Integrated Manufacturing 86 (2024) 102661
2024
-
[20]
Q. Zou, L. Zhu, Bringing attention to CAD: Boundary representation learning via transformer, Computer-Aided Design 189 (2025) 103940
2025
-
[21]
Zou, H.-Y
Q. Zou, H.-Y . Feng, Push-pull direct modeling of solid cad models, Ad- vances in Engineering Software 127 (2019) 59–69
2019
-
[22]
A. R. Colligan, T. T. Robinson, D. C. Nolan, Y . Hua, W. Cao, Hierarchi- cal CADNet: Learning from B-Reps for machining feature recognition, Computer-Aided Design 147 (2022) 103226
2022
-
[23]
W. Cao, T. Robinson, Y . Hua, F. Boussuge, A. R. Colligan, W. Pan, Graph representation of 3d CAD models for machining feature recognition with deep learning, in: International Design Engineering Technical Confer- ences and Computers and Information in Engineering Conference, V ol. 84003, 2020, p. V08AT11A003
2020
-
[24]
J. G. Lambourne, K. D. Willis, P. K. Jayaraman, A. Sanghi, P. Meltzer, H. Shayani, BRepNet: A topological message passing system for solid models, in: Proceedings of the IEEE/CVF Conference on Computer Vi- sion and Pattern Recognition, 2021, pp. 12773–12782
2021
-
[25]
P. K. Jayaraman, J. G. Lambourne, N. Desai, K. Willis, A. Sanghi, N. J. Morris, SolidGen: An autoregressive model for direct B-rep synthesis, Transactions on Machine Learning Research
-
[26]
Zhang, Z
S. Zhang, Z. Guan, H. Jiang, X. Wang, P. Tan, BrepMFR: Enhancing machining feature recognition in B-rep models through deep learning and domain adaptation, Computer Aided Geometric Design 111 (2024) 102318
2024
-
[27]
Cheng, R
X. Cheng, R. Lei, D. Huang, Z. Liao, F. Piao, Y . Chen, P. Feng, L. Zeng, Constraint-aware feature learning for parametric point cloud, in: Pro- ceedings of the IEEE/CVF International Conference on Computer Vision, 2025, pp. 28114–28124
2025
-
[28]
Z. Tang, Q. Zou, S. Gao, A decision-support method for multi-parameter editing of parametric cad models, Advanced Engineering Informatics 56 (2023) 101997
2023
-
[29]
R. Fan, F. He, Y . Liu, J. Lin, A history-based parametric cad sketch dataset with advanced engineering commands, Computer-Aided Design 182 (2025) 103848
2025
-
[30]
R. Wu, C. Xiao, C. Zheng, DeepCAD: A deep generative network for computer-aided design models, in: Proceedings of the IEEE/CVF Inter- national Conference on Computer Vision, 2021, pp. 6772–6782
2021
-
[31]
K. D. Willis, Y . Pu, J. Luo, H. Chu, T. Du, J. G. Lambourne, A. Solar- Lezama, W. Matusik, Fusion 360 Gallery: A dataset and environment for programmatic CAD construction from human design sequences, ACM 13 Transactions on Graphics 40 (2021) 1–24
2021
-
[32]
Jones, D
B. Jones, D. Hildreth, D. Chen, I. Baran, V . G. Kim, A. Schulz, AutoMate: A dataset and learning approach for automatic mating of CAD assemblies, ACM Transactions on Graphics 40 (2021) 1–18
2021
-
[33]
K. D. Willis, P. K. Jayaraman, H. Chu, Y . Tian, Y . Li, D. Grandi, A. Sanghi, L. Tran, J. G. Lambourne, A. Solar-Lezama, et al., JoinABLe: Learning bottom-up assembly of parametric CAD joints, in: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recogni- tion, 2022, pp. 15849–15860
2022
- [34]
-
[35]
Snell, K
J. Snell, K. Swersky, R. Zemel, Prototypical networks for few-shot learn- ing, in: Proceedings of the 31st International Conference on Neural In- formation Processing Systems, 2017, p. 4080–4090
2017
-
[36]
J. Zhou, Y . Zhao, F. Zhong, Prototype optimization and self-training for few-shot 3d point cloud semantic segmentation, Computer-Aided Design 190 (2026) 103976
2026
-
[37]
M. Li, Y . F. Zhang, J. Y . H. Fuh, Z. M. Qiu, Toward effective mechanical design reuse: CAD model retrieval based on general and partial shapes, Journal of Mechanical Design 131 (12) (2009) 124501
2009
-
[38]
Z. Li, X. Zhou, W. Liu, A geometric reasoning approach to hierarchi- cal representation for B-rep model retrieval, Computer-Aided Design 62 (2015) 190–202
2015
-
[39]
P.-S. Wang, Y . Liu, Y .-X. Guo, C.-Y . Sun, X. Tong, O-CNN: Octree-based convolutional neural networks for 3D shape analysis, ACM Transactions On Graphics 36 (4) (2017) 1–11
2017
-
[40]
Bickel, B
S. Bickel, B. Schleich, S. Wartzack, A novel shape retrieval method for 3D mechanical components based on object projection, pre-trained deep learning models and autoencoder, Computer-Aided Design 154 (2023) 103417
2023
-
[41]
Liang, S
Y . Liang, S. Zhao, B. Yu, J. Zhang, F. He, MeshMAE: Masked autoen- coders for 3D mesh data analysis, in: Proceedings of the European Con- ference on Computer Vision, 2022, pp. 37–54
2022
-
[42]
Zhang, G
C. Zhang, G. Zhou, H. Yang, Z. Xiao, X. Yang, View-based 3-D CAD model retrieval with deep residual networks, IEEE Transactions on In- dustrial Informatics 16 (4) (2020) 2335–2345
2020
-
[43]
G ¨umeli, A
C. G ¨umeli, A. Dai, M. Nießner, ROCA: Robust CAD model retrieval and alignment from a single image, in: Proceedings of the IEEE/CVF Confer- ence on Computer Vision and Pattern Recognition, 2022, pp. 4022–4031
2022
-
[44]
J. Hou, C. Luo, F. Qin, Y . Shao, X. Chen, FuS-GCN: Efficient B-rep based graph convolutional networks for 3D-CAD model classification and retrieval, Advanced Engineering Informatics 56 (2023) 102008
2023
-
[45]
F. Qin, L. Zhu, Z. Xu, M. Fang, P. Li, CADGCL: unsupervised retrieval of CAD models via boundary representations, The Visual Computer 41 (2025) 6493–6505
2025
-
[46]
Y . Lou, X. Li, H. Chen, X. Zhou, BRep-BERT: Pre-training boundary rep- resentation BERT with sub-graph node contrastive learning, in: Proceed- ings of the ACM International Conference on Information and Knowledge Management, 2023, pp. 1657–1666
2023
-
[47]
Dao, Flashattention-2: Faster attention with better parallelism and work partitioning, in: The Twelfth International Conference on Learning Representations, 2024
T. Dao, Flashattention-2: Faster attention with better parallelism and work partitioning, in: The Twelfth International Conference on Learning Representations, 2024
2024
-
[48]
F. Zhu, Z. Cheng, X.-Y . Zhang, C.-L. Liu, Rethinking confidence calibra- tion for failure prediction, in: Computer Vision–ECCV 2022, 2022, pp. 518–536
2022
-
[49]
Jiang, R
Z. Jiang, R. Meng, X. Yang, S. Yavuz, Y . Zhou, W. Chen, Vlm2vec: Training vision-language models for massive multimodal embedding tasks, in: The Thirteenth International Conference on Learning Repre- sentations, 2025
2025
-
[50]
McMahan, E
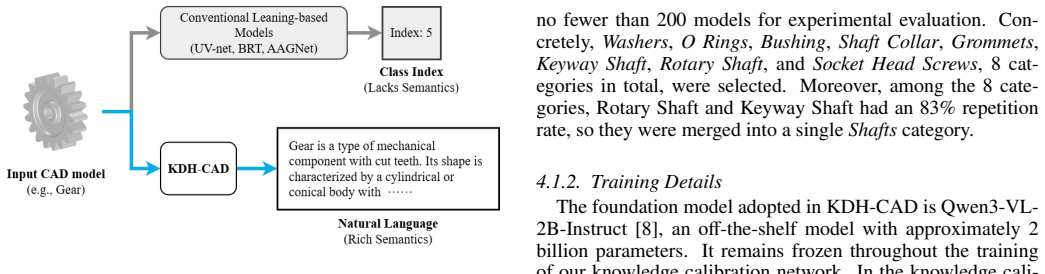
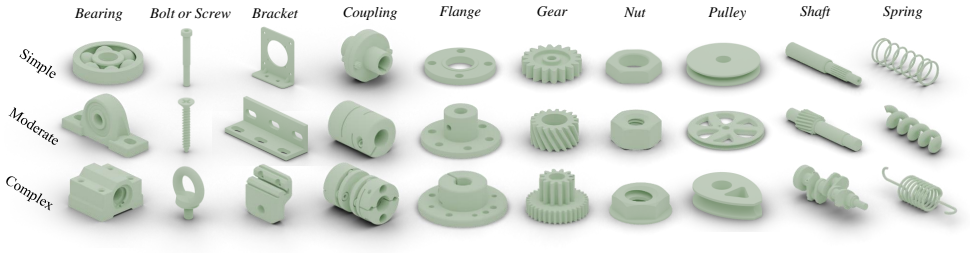
B. McMahan, E. Moore, D. Ramage, S. Hampson, B. A. y Arcas, Communication-efficient learning of deep networks from decentralized data, in: Artificial Intelligence and Statistics, 2017, pp. 1273–1282. Appendix A. Construction of Limited Data The dataset used in our experiments is the Truly Mechanical CAD (TMCAD) dataset [20], which comprises ten mechani- c...
2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.