A first-optimize-then-reduce framework for optimal control with the shifted proper orthogonal decomposition
Pith reviewed 2026-06-28 13:31 UTC · model grok-4.3
The pith
Shifted proper orthogonal decomposition approximates the optimality system for advection-constrained optimal control more efficiently than standard POD.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The shifted proper orthogonal decomposition can be used to approximate the optimality system arising from the full-order advection-constrained linear quadratic optimal control problem within the first-optimize-then-reduce framework, providing a reduced-order model that achieves computational savings compared to using standard proper orthogonal decomposition while maintaining accuracy in the control solution.
What carries the argument
The shifted proper orthogonal decomposition (sPOD), a nonlinear model-order reduction technique that incorporates shifts to better capture transport phenomena, applied to approximate the optimality system in the first-optimize-then-reduce framework.
If this is right
- The reduced-order optimality system can be solved with lower computational cost for repeated evaluations in the control problem.
- sPOD provides better approximation quality for transport-dominated dynamics than standard POD in this setting.
- The framework enables faster solution of optimal control problems that require multiple full-order PDE solves.
- Similar computational benefits apply to other linear quadratic control problems involving advection.
Where Pith is reading between the lines
- The same reduction strategy could be tested on higher-dimensional or nonlinear transport problems to check if the advantage persists.
- Integrating sPOD with other reduction methods might further lower the dimension needed for accurate control solutions.
- This approach could support real-time optimal control by replacing full-order solves in iterative optimization loops.
Load-bearing premise
The optimality system of the full-order problem has a low-dimensional representation in the shifted POD basis that accurately captures the necessary information for solving the control problem.
What would settle it
Numerical tests on the 1D advection control problem showing that the control from the sPOD-reduced optimality system deviates substantially from the full-order solution or requires more computation than POD would falsify the claimed advantage.
Figures
read the original abstract
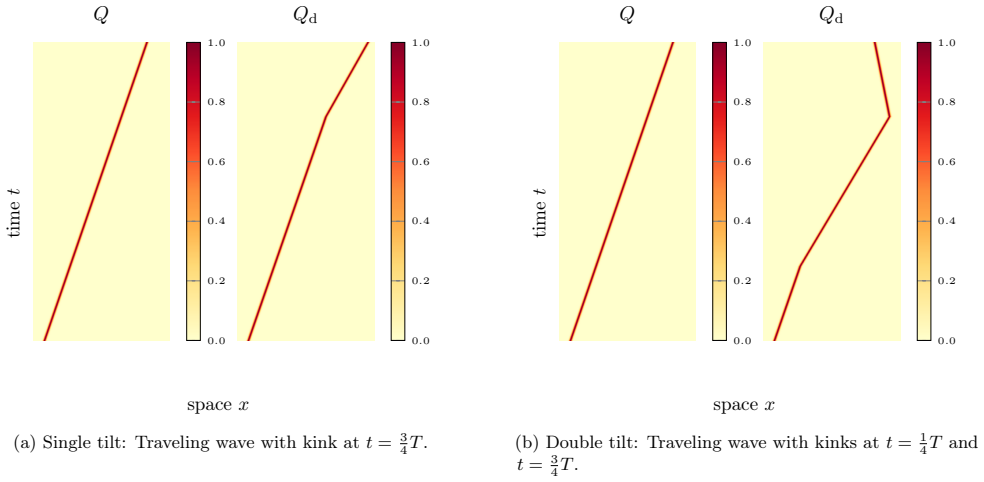
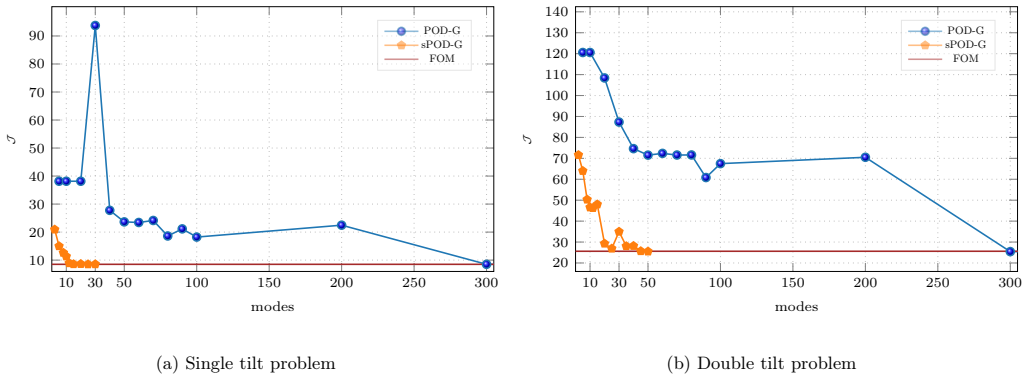
Overcoming the Kolmogorov barrier for constructing efficient reduced-order models (ROMs) for transport-dominated problems remains a challenge. This has impeded their use as computationally cheap surrogates for partial differential equations (PDEs) associated with optimal control problems. Since such problems require multiple computations of the full PDE, employing their reduced-order surrogates instead could speed up the overall optimal control problem. Motivated by this idea, in this paper we explore the use of a nonlinear model-order reduction technique, namely, the shifted proper orthogonal decomposition (sPOD) in an optimal control context. In doing so, we explore the framework of first-optimize-then-reduce (FOTR) where an optimality system for the full PDE problem is constructed first, followed by approximating the optimality system with reduced-order models. We consider this framework for a linear quadratic optimal control problem constrained by a 1D linear advection equation and compare the computational performance of the sPOD method against the use of the standard POD.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript explores a first-optimize-then-reduce (FOTR) framework for a linear-quadratic optimal control problem constrained by the 1D linear advection equation. It constructs the full optimality system (state-adjoint-control) and then applies the shifted proper orthogonal decomposition (sPOD) to approximate this system, comparing computational performance against standard POD to address the Kolmogorov barrier for transport-dominated problems.
Significance. If the sPOD reduction of the optimality system is shown to deliver accurate controls at substantially lower cost than POD while preserving the necessary structure for the advection problem, the work would provide a concrete demonstration of nonlinear model reduction in an optimal-control setting where standard linear techniques are known to struggle.
major comments (2)
- [Abstract and numerical-results section] The abstract states that performance will be compared and that sPOD offers computational advantages, yet supplies no numerical results, error metrics (e.g., control error norms or optimality-system residuals), or verification that the reduced system yields acceptable controls. This absence leaves the central empirical claim without visible support.
- [Framework and sPOD construction] The weakest assumption—that the optimality system admits a low-dimensional shifted representation without problem-specific tuning—is presented as an empirical question the paper sets out to test, but no a-priori error bound, rank estimate, or shift-selection analysis is referenced that would indicate when the assumption holds for the advection-constrained optimality system.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript exploring the sPOD-based first-optimize-then-reduce framework for the advection-constrained LQ problem. We address each major comment below.
read point-by-point responses
-
Referee: [Abstract and numerical-results section] The abstract states that performance will be compared and that sPOD offers computational advantages, yet supplies no numerical results, error metrics (e.g., control error norms or optimality-system residuals), or verification that the reduced system yields acceptable controls. This absence leaves the central empirical claim without visible support.
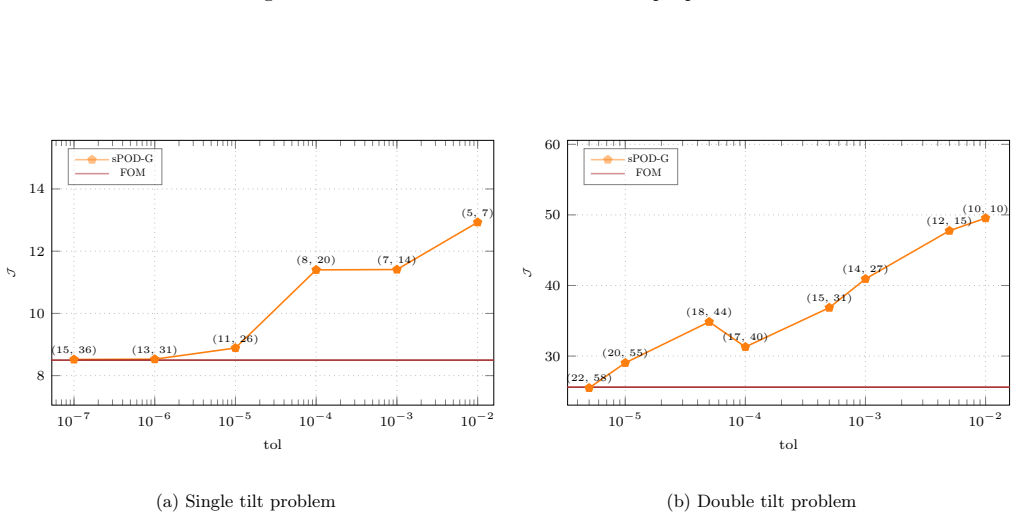
Authors: The full manuscript contains a dedicated numerical experiments section (Section 4) that compares CPU times for sPOD versus POD on the optimality system and includes solution plots for state, adjoint, and control. To address the concern directly, we will revise the section to add explicit quantitative metrics, including L2 error norms between the reduced and full-order controls as well as residuals of the optimality system, along with a table summarizing these values across different shift parameters and reduced dimensions. This will make the empirical support for the claimed advantages fully visible. revision: yes
-
Referee: [Framework and sPOD construction] The weakest assumption—that the optimality system admits a low-dimensional shifted representation without problem-specific tuning—is presented as an empirical question the paper sets out to test, but no a-priori error bound, rank estimate, or shift-selection analysis is referenced that would indicate when the assumption holds for the advection-constrained optimality system.
Authors: The manuscript is framed as a numerical exploration of the FOTR approach rather than a theoretical analysis. Shift selection follows the standard sPOD procedure of minimizing the reconstruction error over candidate shifts, as established in the referenced sPOD literature for transport problems; we apply the same procedure to the coupled optimality system without additional problem-specific tuning beyond the advection speed. While a-priori rank estimates or error bounds for the full optimality system would strengthen the work, developing such bounds is an open question that exceeds the scope of the present paper, which instead provides concrete evidence that low-dimensional shifted representations are attainable for this class of problems. revision: no
Circularity Check
No significant circularity identified in the derivation chain
full rationale
The paper constructs the full optimality system for the LQ control problem constrained by the 1D advection equation, then applies sPOD (and compares to POD) to obtain a reduced approximation within the FOTR framework. This is a standard model-reduction workflow whose accuracy and cost claims are evaluated numerically on the target problem; no equation or parameter is defined in terms of the output it is later used to predict, no load-bearing uniqueness result is imported from self-citation, and the low-rank shifted structure is treated as an empirical property to be tested rather than an assumption that forces the result by construction. The derivation therefore remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Afanasiev and M
K. Afanasiev and M. Hinze. Adaptive control of a wake flow using proper orthogonal decomposition.Lect. Notes Pure and App. Mathematics, 216:317–332, Jan 2001
2001
-
[2]
Arian, M
E. Arian, M. Fahl, and E.W. Sachs. Trust-region Proper Orthogonal Decomposition for Flow Control.ICASE rep., 2000
2000
-
[3]
Barzilai and J
J. Barzilai and J. M. Borwein. Two-Point Step Size Gradient Methods.IMA J. Numer. Anal., 8(1):141–148, 1988
1988
-
[4]
Benner, E
P. Benner, E. Sachs, and S. Volkwein.Model Order Reduction for PDE Constrained Optimization, pages 303–326. Springer International Publishing, Cham, 2014
2014
-
[5]
Black, P
F. Black, P. Schulze, and B. Unger. Projection-based model reduction with dynamically transformed modes.ESAIM Math. Model. Numer. Anal., 54(6):2011–2043, 2020. 12
2011
-
[6]
Black, P
F. Black, P. Schulze, and B. Unger. Efficient Wildland Fire Simulation via Nonlinear Model Order Reduction.MDPI Fluids, 6(8):280, 2021
2021
-
[7]
T. Breiten, S. Burela, and P. Schulze. Optimal control with the shifted proper orthogonal decomposition via a first-reduce- then-optimize framework. ArXiv preprint 2603.28442v1, 2026
-
[8]
Chaturantabut and D.C
S. Chaturantabut and D.C. Sorensen. Nonlinear Model Reduction via Discrete Empirical Interpolation.SIAM J. Sci. Comput., 32(5):2737–2764, January 2010
2010
-
[9]
Gräßle, M
C. Gräßle, M. Gubisch, S. Metzdorf, S. Rogg, and S. Volkwein. POD basis updates for nonlinear PDE control.at - Automatisierungstechnik, 65(5):298–307, May 2017
2017
- [10]
-
[11]
Hinze and S
M. Hinze and S. Volkwein. Proper Orthogonal Decomposition Surrogate Models for Nonlinear Dynamical Systems: Error Estimates and Suboptimal Control. InDimension Reduction of Large-Scale Systems, volume 45, pages 261–306. Springer- Verlag, Berlin/Heidelberg, 2005
2005
-
[12]
Krah.Non-linear reduced order modeling for transport dominated fluid systems
P. Krah.Non-linear reduced order modeling for transport dominated fluid systems. PhD thesis, TU Berlin, Berlin, Germany, 2023
2023
-
[13]
Kunisch and S
K. Kunisch and S. Volkwein. Control of the Burgers Equation by a Reduced-Order Approach Using Proper Orthogonal Decomposition.J. Optim. Theory Appl., 102(2):345–371, August 1999
1999
-
[14]
Kunisch and S
K. Kunisch and S. Volkwein. Proper orthogonal decomposition for optimality systems.ESAIM Math. Model. Numer. Anal., 42(1):1–23, January 2008
2008
-
[15]
Negri, A
F. Negri, A. Manzoni, and G. Rozza. Reduced basis approximation of parametrized optimal flow control problems for the Stokes equations.Comput. Math. Appl., 69(4):319–336, February 2015
2015
-
[16]
Negri, G
F. Negri, G. Rozza, A. Manzoni, and A. Quarteroni. Reduced Basis Method for Parametrized Elliptic Optimal Control Problems.SIAM J. Sci. Comput., 35(5):A2316–A2340, January 2013
2013
-
[17]
S. S. Ravindran. A reduced-order approach for optimal control of fluids using proper orthogonal decomposition.Int. J. Numer. Meth. Fluids, 34(5):425–448, 2000
2000
-
[18]
Ravindran
S.S. Ravindran. Adaptive Reduced-Order Controllers for a Thermal Flow System Using Proper Orthogonal Decomposition. SIAM J. Sci. Comput., 23(6):1924–1942, January 2002
1924
-
[19]
J. Reiss. Optimization-Based Modal Decomposition for Systems with Multiple Transports.SIAM J. Sci. Comput., 43(3):A2079–A2101, 2021
2021
-
[20]
Reiss, P
J. Reiss, P. Schulze, J. Sesterhenn, and V. Mehrmann. The Shifted Proper Orthogonal Decomposition: A Mode Decomposition for Multiple Transport Phenomena.SIAM J. Sci. Comput., 40(3):A1322–A1344, 2018
2018
-
[21]
C. W. Rowley and J. E. Marsden. Reconstruction equations and the Karhunen–Loève expansion for systems with symmetry. Phys. D: Nonlinear Phenom., 142(1-2):1–19, August 2000
2000
-
[22]
Schulze.Energy-Based Model Reduction of Transport-Dominated Phenomena
P. Schulze.Energy-Based Model Reduction of Transport-Dominated Phenomena. PhD thesis, TU Berlin, Berlin, Germany, 2023
2023
-
[23]
Truong and H.T
T.T. Truong and H.T. Nguyen. Backtracking Gradient Descent Method and Some Applications in Large Scale Optimisation. Part 2: Algorithms and Experiments.Appl. Math. Opt., 84(3):2557–2586, December 2021
2021
-
[24]
Tröltzsch.Optimal Control of Partial Differential Equations
F. Tröltzsch.Optimal Control of Partial Differential Equations. American Mathematical Society, Providence, Rhode Island, 2010
2010
-
[25]
Tucsnak and G
M. Tucsnak and G. Weiss.Observation and Control for Operator Semigroups. Birkhäuser Basel, Basel, 2009. 13
2009
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.