FW-NKF: Frequency-Weighted Neural Kalman Filters
Pith reviewed 2026-06-28 14:45 UTC · model grok-4.3
The pith
FW-NKF embeds a causal spectral-shaping operator into the Kalman measurement residual to attenuate noise-dominated frequency bands and reduce localization error by up to 10%.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
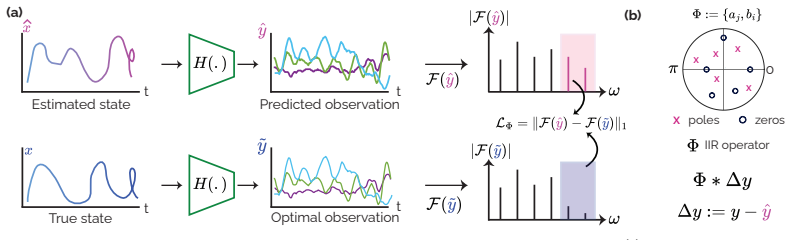
By embedding a causal spectral-shaping operator into the Kalman measurement residual and jointly learning observation and transition networks, FW-NKF adapts both the filter spectrum and the latent state representation to attenuate noise-dominated frequency bands while capturing complex residual structures.
What carries the argument
Causal spectral-shaping operator embedded in the Kalman measurement residual, which works together with jointly learned observation and transition networks to adapt the filter spectrum.
If this is right
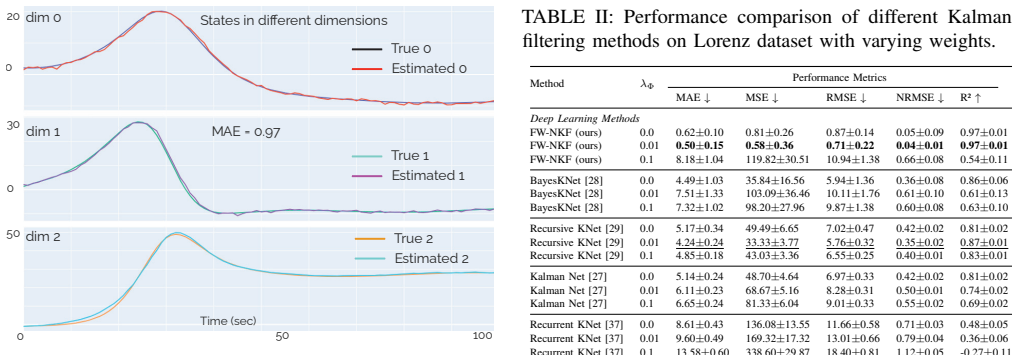
- Localization error reduces by up to 10% across heterogeneous benchmarks that include chaotic systems.
- Orientation accuracy improves in full-body inertial pose estimation.
- Both frequency weighting and deep latent-state modeling contribute to performance, as confirmed by ablations.
- The method handles sensor vibrations, electromagnetic interference, and periodic noise more effectively than prior DKF variants.
Where Pith is reading between the lines
- The same spectral operator could be tested inside other recursive estimators that currently lack explicit frequency handling.
- Real-time robotic systems operating in environments with known band-limited disturbances might require less manual filter tuning.
- Offline versions of the operator could be explored to check whether relaxing causality yields further accuracy gains on recorded data.
Load-bearing premise
A causal spectral-shaping operator can be embedded into the Kalman measurement residual while preserving filter stability and delivering performance gains without new instabilities.
What would settle it
Running FW-NKF on one of the reported benchmarks and finding either no reduction in localization error relative to a standard neural Kalman filter or the appearance of filter divergence.
Figures
read the original abstract
Robust state estimation is central to robotic autonomy, yet classical Kalman filters struggle with frequency-dependent disturbances and model mismatch such as sensor vibrations, electromagnetic interference, and periodic noise. Although Deep Kalman Filter (DKF) variants extend the Extended Kalman Filtering (EKF) framework by learning latent transitions, they lack explicit mechanisms to suppress band-limited noise components that typically corrupt sensor measurements in real-world scenarios. We introduce the Frequency-Weighted Neural Kalman Filter (FW-NKF), a unified hybrid approach that embeds a causal spectral-shaping operator into the Kalman measurement residual and jointly learns observation, and transition networks. By adapting both the filter spectrum and the latent state representation, FW-NKF attenuates the noise-dominated frequency bands while capturing complex residual structures. We conduct extensive experiments on four heterogeneous benchmarks, including chaotic systems such as multi-dimensional Lorenz systems and full-body inertial pose estimation, and find a reduction in localization error of up to 10% as well as marked improvements in orientation accuracy. Our ablation studies confirm that frequency weighting and deep latent-state modeling contribute to overall performance.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces the Frequency-Weighted Neural Kalman Filter (FW-NKF), a hybrid method that embeds a causal spectral-shaping operator into the Kalman measurement residual while jointly learning observation and transition networks. The approach aims to attenuate noise-dominated frequency bands in sensor data for robotic state estimation tasks. Experiments across four benchmarks (including multi-dimensional Lorenz systems and full-body inertial pose estimation) report up to 10% reduction in localization error and improvements in orientation accuracy, with ablations attributing gains to both frequency weighting and deep latent-state modeling.
Significance. If the embedded spectral operator can be shown to preserve causality, stability, and positive-definiteness of the innovation covariance, the method would offer a concrete extension of deep Kalman filters for handling band-limited disturbances common in robotics. The reported gains on heterogeneous benchmarks indicate potential practical utility, though the 10% error reduction requires detailed verification against baselines and with statistical support.
major comments (2)
- [Abstract] Abstract: The claim that a 'causal spectral-shaping operator' is embedded into the Kalman measurement residual lacks any derivation showing that the frequency-domain weighting (via FFT or learned filter) has an impulse response supported only on non-negative lags and does not alter the positive-definiteness of the innovation covariance at each recursion step. This is load-bearing for both filter stability and the validity of the reported 10% error reduction.
- [Abstract] Abstract: The empirical claim of 'a reduction in localization error of up to 10%' and 'marked improvements in orientation accuracy' is stated without equations for the spectral operator, implementation details, error bars, baseline definitions, or verification that the central performance claim holds after accounting for the operator's effect on the recursive update.
minor comments (1)
- [Abstract] The abstract would benefit from explicit naming of the four heterogeneous benchmarks and the specific baselines used for the 10% comparison.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the abstract claims. We address each major comment below and will revise the manuscript to strengthen the presentation of theoretical properties and empirical details.
read point-by-point responses
-
Referee: [Abstract] Abstract: The claim that a 'causal spectral-shaping operator' is embedded into the Kalman measurement residual lacks any derivation showing that the frequency-domain weighting (via FFT or learned filter) has an impulse response supported only on non-negative lags and does not alter the positive-definiteness of the innovation covariance at each recursion step. This is load-bearing for both filter stability and the validity of the reported 10% error reduction.
Authors: The operator is constructed in the manuscript as a time-domain causal FIR filter whose impulse response is supported only on non-negative lags by design. We agree that an explicit derivation confirming preservation of positive-definiteness of the innovation covariance at each step is not provided in the current version. In the revision we will add this short derivation to the methods section and reference it from the abstract. revision: yes
-
Referee: [Abstract] Abstract: The empirical claim of 'a reduction in localization error of up to 10%' and 'marked improvements in orientation accuracy' is stated without equations for the spectral operator, implementation details, error bars, baseline definitions, or verification that the central performance claim holds after accounting for the operator's effect on the recursive update.
Authors: The equations, implementation details, baselines, error bars, and ablation results (including the operator's contribution) appear in Sections 3–5 of the manuscript. The abstract is space-constrained, but we will revise it to qualify the performance claims more precisely and point to the relevant sections. We will also add explicit verification of the operator's effect on the recursive update in the revised text. revision: partial
Circularity Check
No significant circularity; derivation and claims are self-contained
full rationale
The paper introduces FW-NKF as a hybrid method that embeds a causal spectral-shaping operator into the Kalman measurement residual while jointly learning observation and transition networks, then validates performance via experiments on four external benchmarks (Lorenz systems, inertial pose estimation). No load-bearing step reduces by construction to fitted inputs, self-citations, or renamed known results; the central construction and reported error reductions are presented as empirical outcomes rather than tautological redefinitions. The derivation chain remains independent of the target performance metrics.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Composable deep reinforcement learning for robotic manipulation,
T. Haarnoja, V . Pong, A. Zhou, M. Dalal, P. Abbeel, and S. Levine, “Composable deep reinforcement learning for robotic manipulation,” in IEEE International Conference on Robotics and Automation (ICRA), 2018, pp. 6244–6251
2018
-
[2]
TransPose: Real-time 3d human translation and pose estimation with six inertial sensors,
X. Yi, Y . Zhou, and F. Xu, “TransPose: Real-time 3d human translation and pose estimation with six inertial sensors,”ACM Transactions on Graphics (TOG), 2021
2021
-
[3]
SpiralNet++: A fast and highly efficient mesh convolution operator,
S. Gong and et al., “SpiralNet++: A fast and highly efficient mesh convolution operator,” inIEEE/CVF International Conference on Computer Vision Workshops (ICCV-W), 2019
2019
-
[4]
HuMoR: 3d human motion model for robust pose estimation,
D. Rempe, T. Birdal, A. Hertzmann, J. Yang, S. Sridhar, and L. J. Guibas, “HuMoR: 3d human motion model for robust pose estimation,” inInternational Conference on Computer Vision (ICCV), 2021
2021
-
[5]
IONet: Learning to cure the curse of drift in inertial odometry,
C. Chen and et al., “IONet: Learning to cure the curse of drift in inertial odometry,” inProceedings of the AAAI Conference on Artificial Intelligence, 2018
2018
-
[6]
TOCH: Spatio-temporal object-to-hand correspondence for motion refinement,
K. Zhou, B. L. Bhatnagar, J. E. Lenssen, and G. Pons-Moll, “TOCH: Spatio-temporal object-to-hand correspondence for motion refinement,” inEuropean Conference on Computer Vision (ECCV), 2022
2022
-
[7]
R. G. Krishnan, U. Shalit, and D. Sontag, “Deep kalman filters,”arXiv preprint arXiv:1511.05121, 2015
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[8]
Structured inference networks for nonlinear state space models,
——, “Structured inference networks for nonlinear state space models,” inProceedings of the AAAI Conference on Artificial Intelligence, 2017
2017
-
[9]
Learning nonlinear dynamics in efficient, balanced spiking networks using local plasticity rules,
A. Alemi and et al., “Learning nonlinear dynamics in efficient, balanced spiking networks using local plasticity rules,” inProceedings of the AAAI Conference on Artificial Intelligence, 2018
2018
-
[10]
Jackknifing multiple-window spectra,
D. Thomson, “Jackknifing multiple-window spectra,” inProceedings of ICASSP ’94. IEEE International Conference on Acoustics, Speech and Signal Processing, vol. vi, 1994, pp. VI/73–VI/76 vol.6
1994
-
[11]
P. S. Maybeck,Stochastic Models, Estimation, and Control. Academic Press, 1982, vol. 2
1982
-
[12]
Spectral filtering for general linear dynamical systems,
E. Hazan, H. Lee, K. Singh, C. Zhang, and Y . Zhang, “Spectral filtering for general linear dynamical systems,” inAdvances in Neural Information Processing Systems, vol. 31, 2018
2018
-
[13]
Vibration-based health characterization of multiple IMUs in UA V applications,
M. O’Connor, H. Millares, P. Banerjee, G. Gorospe, and N. Endres, “Vibration-based health characterization of multiple IMUs in UA V applications,” Mar. 2020. [Online]. Available: https://ntrs.nasa.gov/citations/20205000223
-
[14]
Statistical-physical models of electromagnetic interfer- ence,
D. Middleton, “Statistical-physical models of electromagnetic interfer- ence,”IEEE Transactions on Electromagnetic Compatibility, 1977
1977
-
[15]
MuProp: Unbiased backpropagation for stochastic neural networks,
S. Gu, S. Levine, I. Sutskever, and A. Mnih, “MuProp: Unbiased backpropagation for stochastic neural networks,” inInternational Conference on Learning Representations, 2016
2016
-
[16]
How to train your differentiable filter,
A. Kloss, G. Martius, and J. Bohg, “How to train your differentiable filter,”Autonomous Robots, vol. 45, pp. 561–578, 2021
2021
-
[17]
Särkkä,Bayesian Filtering and Smoothing
S. Särkkä,Bayesian Filtering and Smoothing. Cambridge University Press, 2013
2013
-
[18]
Differentiable particle filtering via entropy- regularized optimal transport,
A. Corenflos and et al., “Differentiable particle filtering via entropy- regularized optimal transport,” inProceedings of the 38th International Conference on Machine Learning, 2021
2021
-
[19]
The unscented Kalman filter for nonlinear estimation,
E. A. Wan and R. Van Der Merwe, “The unscented Kalman filter for nonlinear estimation,” inProceedings of the IEEE 2000 Adaptive Sys- tems for Signal Processing, Communications, and Control Symposium, 2000, pp. 153–158
2000
-
[20]
A new approach to linear filtering and prediction problems,
R. E. Kalman, “A new approach to linear filtering and prediction problems,”Transactions of the ASME–Journal of Basic Engineering, 1960
1960
-
[21]
An introduction to the kalman filter,
G. Welch and G. Bishop, “An introduction to the kalman filter,” University of North Carolina at Chapel Hill, Department of Computer Science, Tech. Rep., 1995
1995
-
[22]
Robust extended kalman filtering,
G. Einicke and L. White, “Robust extended kalman filtering,”IEEE Transactions on Signal Processing, 1999
1999
-
[23]
Comparison of estimation accuracy of ekf, ukf and pf filters,
S. Konatowski and et al., “Comparison of estimation accuracy of ekf, ukf and pf filters,”Annual of Navigation, 2016
2016
-
[24]
Perceptual Kalman filters: Online state estimation under a perfect perceptual-quality constraint,
D. Freirich and et al., “Perceptual Kalman filters: Online state estimation under a perfect perceptual-quality constraint,” inAdvances in Neural Information Processing Systems (NeurIPS), 2023
2023
-
[25]
Bar-Shalom, X
Y . Bar-Shalom, X. R. Li, and T. Kirubarajan,Estimation with Applications to Tracking and Navigation. Wiley, 2001
2001
-
[26]
A new extension of the Kalman filter to nonlinear systems,
S. J. Julier and J. K. Uhlmann, “A new extension of the Kalman filter to nonlinear systems,” inProceedings of SPIE – Signal Processing, Sensor Fusion, and Target Recognition VI, 1997
1997
-
[27]
KalmanNet: Neural network aided Kalman filtering for partially known dynamics,
G. Revach and et al., “KalmanNet: Neural network aided Kalman filtering for partially known dynamics,”IEEE Transactions on Signal Processing, vol. 70, pp. 1532–1547, 2022
2022
-
[28]
Uncertainty quantification in deep learning based Kalman filters,
Y . Dahan and et al., “Uncertainty quantification in deep learning based Kalman filters,” inIEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), 2024
2024
-
[29]
H. Mortada and et al., “Recursive KalmanNet: Deep learning- augmented Kalman filtering for state estimation with consistent uncertainty quantification,”arXiv preprint arXiv:2506.11639, 2025
-
[30]
Deep variational bayes filters: Unsupervised learning of state space models from raw data,
M. Karl and et al., “Deep variational bayes filters: Unsupervised learning of state space models from raw data,” inInternational Conference on Learning Representations (ICLR), 2017
2017
-
[31]
Optimal and robust noncausal filter formulations,
G. A. Einicke, “Optimal and robust noncausal filter formulations,” IEEE Transactions on Signal Processing, pp. 1069–1077, 2006
2006
-
[32]
Analyzing frequency response of inertial MEMS in stabilization systems,
M. Looney, “Analyzing frequency response of inertial MEMS in stabilization systems,”Analog Dialogue, vol. 46, no. 3, 2012. [On- line]. Available: https://www.analog.com/en/resources/analog-dialogue/ articles/analyzing-frequency-response-of-inertial-mems.html
2012
-
[33]
Ultra inertial poser: Scalable motion capture and tracking from sparse inertial sensors and ultra-wideband ranging,
R. Armani, C. Qian, J. Jiang, and C. Holz, “Ultra inertial poser: Scalable motion capture and tracking from sparse inertial sensors and ultra-wideband ranging,” inACM SIGGRAPH 2024 Conference Papers
2024
-
[34]
University of michigan north campus long-term vision and lidar dataset,
C. Carlevaris-Biancoet al., “University of michigan north campus long-term vision and lidar dataset,”International Journal of Robotics Research, 2016
2016
-
[35]
State estimation, robust control and obstacle avoidance for multicopter in cluttered environments: Euroc experience and results,
M. Orsag and et al., “State estimation, robust control and obstacle avoidance for multicopter in cluttered environments: Euroc experience and results,” in2015 International Conference on Unmanned Aircraft Systems (ICUAS), 2015
2015
-
[36]
The euroc micro aerial vehicle datasets,
M. Burriet al., “The euroc micro aerial vehicle datasets,”The International Journal of Robotics Research, pp. 1157–1163, 2016
2016
-
[37]
Recurrent Kalman networks: Factorized inference in high-dimensional deep feature spaces,
P. Becker and et al., “Recurrent Kalman networks: Factorized inference in high-dimensional deep feature spaces,” inProceedings of the 36th International Conference on Machine Learning (ICML), 2019
2019
-
[38]
Autoregressive Kalman filter,
Y . Dahan, “Autoregressive Kalman filter,” 2022, software available at https://github.com/yonatandn/AutoRegKF. [Online]. Available: https://github.com/yonatandn/AutoRegKF
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.