Power System CBFs
Pith reviewed 2026-06-28 12:56 UTC · model grok-4.3
The pith
A control barrier function framework enforces safety on both dynamic and algebraic variables in power system DAE models.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
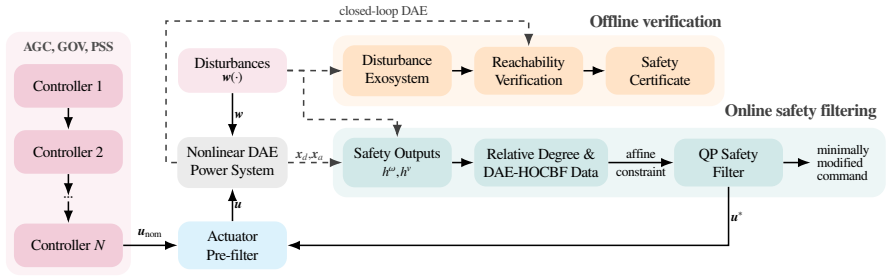
The central claim is that control barrier functions can be defined for power system differential-algebraic equation models to enforce forward invariance of sets defined by constraints on both differential states and algebraic variables, achieved through a real-time quadratic program that filters nominal controls and an offline reachability certificate that verifies safe operation for frequency and voltage limits while preserving the power flow equations.
What carries the argument
The extended control barrier function conditions on algebraic variables within the DAE structure, implemented as an optimization layer for safety filtering and supported by reachability-based certificates.
If this is right
- The safety filter can be applied to any existing power system controller to enforce voltage and frequency limits in real time.
- Offline reachability analysis provides a mathematical guarantee of safety for all admissible trajectories.
- The differential-algebraic structure of the power flow network is maintained during the safety enforcement process.
- Frequency and voltage safety can be handled in a unified manner without separate controllers for each.
Where Pith is reading between the lines
- This approach might scale to very large power networks if the optimization can be solved quickly enough on standard hardware.
- The reachability certificate could be used to compare different nominal controllers for their inherent safety margins.
- Similar extensions of CBFs could address safety in other DAE-based systems like certain mechanical or chemical process models.
Load-bearing premise
Safety constraints on algebraic variables like bus voltages can be encoded using control barrier function conditions that preserve the differential-algebraic equation form and permit real-time solution of the resulting optimization problem.
What would settle it
A numerical simulation of a standard power system model in which the proposed safety filter allows a voltage constraint violation or fails to find a feasible control input within the required time.
Figures
read the original abstract
Control barrier functions (CBFs) have become a standard tool in safety critical-control systems. CBFs convert state constraints into real time control conditions that certify forward invariance (meaning that once the system starts in a safe region, it remains there for all future times) and minimally modify a nominal controller only when safety is at risk. In power systems, CBF based methods have been proposed for frequency and voltage safety, but they largely remain disconnected from three key features that are central to power system operation: differential algebraic equation (DAE) models that capture network power flow constraints, safety specifications involving algebraic variables such as bus voltages, and formal verification of the resulting closed loop system. This paper closes this gap by developing a CBF framework for power system DAE models that supports safety constraints on both dynamic and algebraic variables. The framework provides real time safety filtering through an optimization layer that wraps around an existing controller and minimally modifies its command to enforce safety. In addition, it provides formal verification (i.e., a mathematical guarantee that all admissible trajectories satisfy the prescribed safety constraints) through an offline reachability based certificate of safe operation. The result is a unified filter and verify methodology for enforcing and certifying frequency and voltage safety in power systems while preserving the DAE structure of the underlying model.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops a control barrier function (CBF) framework tailored to power system models expressed as index-1 differential-algebraic equations (DAEs). It extends standard CBF theory to enforce safety constraints simultaneously on differential states (e.g., frequencies) and algebraic states (e.g., bus voltages), supplies a quadratic-program (QP) safety filter that minimally modifies a nominal controller in real time, and supplies an offline reachability certificate that formally verifies forward invariance of the safe set for all admissible closed-loop trajectories while respecting the underlying DAE manifold.
Significance. If the algebraic-variable CBF conditions are shown to be well-posed on the constraint manifold and the resulting QP remains tractable at power-system scale, the work would provide a concrete bridge between CBF-based safety filtering and the DAE models that dominate power-system analysis. The combination of an online filter with an offline reachability certificate is a useful methodological contribution; explicit credit is due for preserving the DAE structure rather than converting to an ODE approximation.
major comments (2)
- [§3] §3 (DAE-CBF construction): the claim that safety sets defined on algebraic variables can be encoded via a CBF condition while preserving the index-1 DAE structure is central to the contribution, yet the manuscript provides no explicit derivation showing that the Lie-derivative condition along the algebraic manifold remains well-defined and that the resulting QP does not inadvertently violate the power-flow equations. A concrete counter-example or invariance proof on the manifold is required.
- [§4] §4 (reachability certificate): the offline certificate is presented as a formal guarantee, but the manuscript does not quantify the conservatism introduced by the reachability computation or demonstrate that the certificate remains computable for networks larger than the illustrative examples. Without this, the verification claim cannot be assessed as load-bearing.
minor comments (2)
- Notation for the algebraic manifold and its tangent space should be introduced once and used consistently; several passages mix x and z without reminding the reader which are differential versus algebraic.
- [Introduction] The abstract states that the filter 'minimally modifies' the command; the precise definition of minimality (e.g., Euclidean norm on control input) should be stated in the problem formulation section.
Simulated Author's Rebuttal
We thank the referee for their constructive review and for recognizing the potential bridge between CBF methods and DAE power-system models. We address the two major comments point by point below.
read point-by-point responses
-
Referee: [§3] §3 (DAE-CBF construction): the claim that safety sets defined on algebraic variables can be encoded via a CBF condition while preserving the index-1 DAE structure is central to the contribution, yet the manuscript provides no explicit derivation showing that the Lie-derivative condition along the algebraic manifold remains well-defined and that the resulting QP does not inadvertently violate the power-flow equations. A concrete counter-example or invariance proof on the manifold is required.
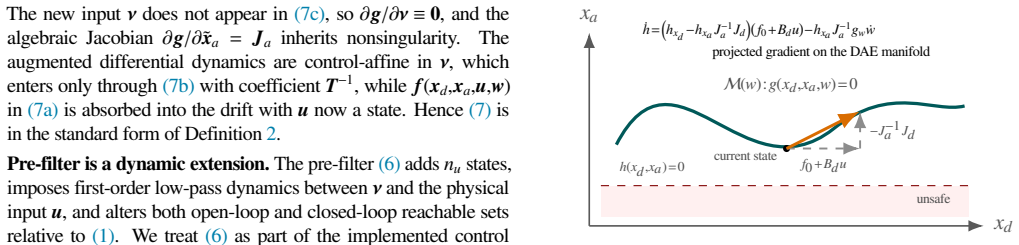
Authors: We agree that an explicit invariance proof on the algebraic manifold is required for rigor. Although §3 states the DAE-CBF conditions and notes that the QP is solved subject to the index-1 DAE, the step-by-step derivation showing that the Lie derivative remains well-defined when the state is constrained to the manifold and that the QP solution cannot violate the algebraic equations was only sketched. We will revise §3 to include a self-contained proof of forward invariance that explicitly uses the implicit-function theorem for the algebraic variables and demonstrates that the safety filter preserves the power-flow manifold by construction. No counter-example will be added because the claim is general rather than instance-specific. revision: yes
-
Referee: [§4] §4 (reachability certificate): the offline certificate is presented as a formal guarantee, but the manuscript does not quantify the conservatism introduced by the reachability computation or demonstrate that the certificate remains computable for networks larger than the illustrative examples. Without this, the verification claim cannot be assessed as load-bearing.
Authors: We acknowledge that the manuscript presents the reachability certificate as a formal guarantee without quantifying the conservatism of the over-approximation or providing scaling results beyond the two small test cases. We will add a paragraph in the revised §4 that identifies the sources of conservatism (e.g., interval arithmetic and zonotope order reduction) and states the computational limits observed on the illustrative networks. A full scaling study on large transmission networks lies outside the scope of the present work and will be noted as future research; therefore only a qualitative discussion of conservatism will be added at this time. revision: partial
Circularity Check
No significant circularity identified
full rationale
The paper presents a new construction extending CBFs to index-1 DAE power-system models, defining safety sets on both differential and algebraic states, adding a QP safety filter, and supplying an offline reachability certificate. No load-bearing step reduces by the paper's own equations or self-citation to a fitted input, self-definition, or renamed known result; the derivation chain is self-contained as an explicit extension of existing CBF theory that respects the algebraic manifold.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Kundur, Power System Stability and Control, EPRI Power System Engineering Series, McGraw-Hill, 1994
P . Kundur, Power System Stability and Control, EPRI Power System Engineering Series, McGraw-Hill, 1994
1994
-
[2]
909, Docket No
Federal Energy Regulatory Commission, Reliability standards for frequency and voltage protection settings and ride-through for inverter-based resources, order No. 909, Docket No. RM25-3-000 (2025)
2025
-
[3]
P . W. Sauer, M. A. Pai, J. H. Chow, Power system dynamics and stability: with synchrophasor measurement and power system toolbox, John Wiley & Sons, 2017
2017
-
[4]
Milano, F
F. Milano, F. Dörfler, G. Hug, D. J. Hill, G. V erbiˇc, Foundations and challenges of low-inertia systems, in: 2018 power systems computation conference (PSCC), IEEE, 2018, pp. 1–25
2018
-
[5]
Ulbig, T
A. Ulbig, T. S. Borsche, G. Andersson, Impact of low rotational inertia on power system stability and operation, IFAC Proceedings V olumes 47 (3) (2014) 7290–7297
2014
-
[6]
A. D. Ames, X. Xu, J. W. Grizzle, P . Tabuada, Control barrier function based quadratic programs for safety critical systems, IEEE Transactions on Automatic Control 62 (8) (2016) 3861–3876
2016
-
[7]
A. D. Ames, S. Coogan, M. Egerstedt, G. Notomista, K. Sreenath, P . Tabuada, Control barrier functions: Theory and applications, in: 2019 18th European control conference (ECC), Ieee, 2019, pp. 3420–3431
2019
-
[8]
Althoff, G
M. Althoff, G. Frehse, A. Girard, Set propagation techniques for reachability analysis, Annual Review of Control, Robotics, and Autonomous Systems 4 (1) (2021) 369–395
2021
-
[9]
T. Zhao, J. Wang, M. Y ue, A barrier-certificated reinforcement learning approach for enhancing power system transient stability, IEEE Transactions on Power Systems 38 (6) (2023) 5356–5366
2023
-
[10]
W. Cui, Y . Jiang, B. Zhang, Reinforcement learning for optimal primary frequency control: A lyapunov approach, IEEE Transactions on Power Systems 38 (2) (2022) 1676–1688
2022
-
[11]
Y uan, C
Z. Y uan, C. Zhao, J. Cortés, Reinforcement learning for distributed transient frequency control with stability and safety guarantees, Systems & Control Letters 185 (2024) 105753
2024
-
[12]
Tabas, B
D. Tabas, B. Zhang, Computationally efficient safe reinforcement learning for power systems, in: 2022 American Control Conference (ACC), IEEE, 2022, pp. 3303–3310
2022
-
[13]
Y . Shi, G. Qu, S. Low, A. Anandkumar, A. Wierman, Stability constrained reinforcement learning for real-time voltage control, in: 2022 American Control Conference (ACC), IEEE, 2022, pp. 2715–2721
2022
-
[14]
Zhang, J
Y . Zhang, J. Cortés, Distributed transient frequency control for power networks with stability and performance guarantees. automation 105 (5), 274–285 (2019)
2019
-
[15]
Zhang, J
Y . Zhang, J. Cortés, Distributed bilayered control for transient frequency safety and system stability in power grids, IEEE Transactions on Control of Network Systems 7 (3) (2020) 1476–1488
2020
-
[16]
T. Zhao, J. Wang, X. Lu, Y . Du, Neural lyapunov control for power system transient stability: A deep learning-based approach, IEEE Transactions on Power Systems 37 (2) (2021) 955–966
2021
-
[17]
Althoff, B
M. Althoff, B. H. Krogh, Reachability analysis of nonlinear differential- algebraic systems, IEEE Transactions on Automatic Control 59 (2) (2013) 371–383
2013
-
[18]
Althoff, Formal and compositional analysis of power systems using reachable sets, IEEE Transactions on Power Systems 29 (5) (2014) 2270–2280
M. Althoff, Formal and compositional analysis of power systems using reachable sets, IEEE Transactions on Power Systems 29 (5) (2014) 2270–2280
2014
-
[19]
El-Guindy, Y
A. El-Guindy, Y . C. Chen, M. Althoff, Compositional transient stability analysis of power systems via the computation of reachable sets, in: 2017 American Control Conference (ACC), IEEE, 2017, pp. 2536–2543
2017
-
[20]
Althoff, Benchmarks for the formal verification of power systems, in: Proc
M. Althoff, Benchmarks for the formal verification of power systems, in: Proc. of 9th International Workshop on Applied V erification of Continuous and Hybrid Systems, 2022
2022
-
[21]
Nguyen, K
Q. Nguyen, K. Sreenath, Exponential control barrier functions for enforcing high relative-degree safety-critical constraints, in: 2016 American Control Conference (ACC), IEEE, 2016, pp. 322–328
2016
-
[22]
W. Xiao, C. Belta, High-order control barrier functions, IEEE Transactions on Automatic Control 67 (7) (2021) 3655–3662
2021
-
[23]
X. Tan, W. S. Cortez, D. V . Dimarogonas, High-order barrier functions: Robustness, safety, and performance-critical control, IEEE Transactions on Automatic Control 67 (6) (2021) 3021–3028
2021
-
[24]
W. Xiao, C. G. Cassandras, C. A. Belta, D. Rus, Control barrier functions for systems with multiple control inputs, in: 2022 American Control Conference (ACC), IEEE, 2022, pp. 2221–2226
2022
-
[25]
Explicit Control Barrier Function-based Safety Filters and their Resource-Aware Computation
P . Mestres, S. S. Mousavi, P . Ong, L. Y ang, E. Das, J. W . Burdick, A. D. Ames, Explicit control barrier function-based safety filters and their resource-aware computation, arXiv preprint arXiv:2512.10118 (2025)
work page internal anchor Pith review Pith/arXiv arXiv 2025
- [26]
-
[27]
M. Schneeberger, S. Mastellone, F. Dörfler, Advanced safety filter based on sos control barrier and lyapunov functions, arXiv preprint arXiv:2401.06901 (2024)
-
[28]
M. Althoff, An introduction to CORA 2015, in: Proc. of the 1st and 2nd Workshop on Applied V erification for Continuous and Hybrid Systems, EasyChair, 2015, pp. 120–151.doi:10.29007/zbkv. URLhttps://easychair.org/publications/paper/xMm
-
[29]
Isidori, Nonlinear control systems: an introduction, Springer, 1985
A. Isidori, Nonlinear control systems: an introduction, Springer, 1985
1985
-
[30]
H. K. Khalil, J. W. Grizzle, Nonlinear systems, V ol. 3, Prentice hall Upper Saddle River, NJ, 2002
2002
-
[31]
Arnström, D
D. Arnström, D. Axehill, A unifying complexity certification framework for active-set methods for convex quadratic programming, IEEE Transactions on Automatic Control 67 (6) (2021) 2758–2770
2021
-
[32]
Arnström, D
D. Arnström, D. Broman, D. Axehill, Exact worst-case execution-time analysis for implicit model predictive control, IEEE Transactions on Automatic Control 69 (10) (2024) 7190–7196
2024
-
[33]
H. Cui, F. Li, K. Tomsovic, Hybrid symbolic-numeric framework for power system modeling and analysis, IEEE Transactions on Power Systems 36 (2) (2020) 1373–1384
2020
-
[34]
Andersson, J
J. Andersson, J. Gillis, G. Horn, J. Rawlings, M. Diehl, Casadi—a software framework for nonlinear optimization and optimal control, Mathematical Programming Computation 11 (1) (2018) 1–36. 15
2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.