NVIDIA Isaac Sim: Enabling Scalable, GPU-Accelerated Simulation for Robotics
Pith reviewed 2026-06-28 10:01 UTC · model grok-4.3
The pith
Isaac Sim's GPU acceleration supports large-scale parallel robot simulation and synthetic data generation to address training data scarcity.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
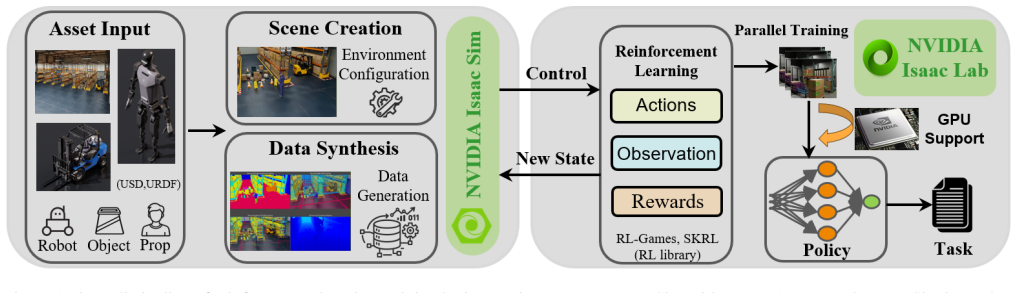
Isaac Sim leverages GPU acceleration to enable large-scale parallel training and physics-accurate modeling, with its synthetic data generation pipeline alleviating the scarcity of high-quality training data and supporting data-driven robot learning and large-scale simulation-centric experimentation, unlike prior surveys that treat it as one simulator among many without detailed architectural analysis.
What carries the argument
The GPU-accelerated simulation engine and synthetic data generation pipeline, which carry out parallel physics modeling and data creation for robot training.
If this is right
- Large-scale simulation-centric experimentation becomes practical for robotics research.
- Data-driven robot learning gains support through abundant synthetic data from the pipeline.
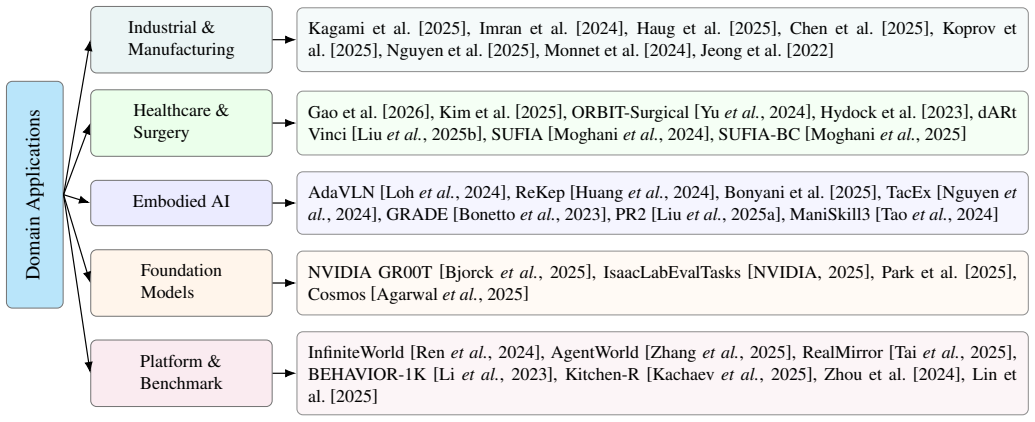
- Representative studies in five domains reveal common patterns in high-fidelity simulation use.
- Future work must address physics open-world learning and practical usability constraints.
Where Pith is reading between the lines
- Integration with real robot hardware could test whether simulation accuracy translates to improved physical performance.
- Comparison data from the survey could guide selection of simulators for specific robot learning tasks.
- Extensions to multi-agent or deformable object scenarios might expose current limits in the physics engine.
Load-bearing premise
Existing surveys lack a systematic analysis of Isaac Sim's architecture, usage patterns, and limitations, so a dedicated review adds necessary detail.
What would settle it
A new comprehensive survey that demonstrates equivalent or superior coverage of Isaac Sim's architecture and usage patterns already exists in the literature.
Figures
read the original abstract
Simulation has become a core infrastructure for robotics research. Unlike previous simulators, NVIDIA Isaac Sim leverages GPU acceleration to enable large-scale parallel training and physics-accurate modeling. Its synthetic data generation pipeline alleviates the scarcity of high-quality training data, supporting data-driven robot learning and large-scale simulation-centric experimentation. However, existing surveys often treat it as one simulator among many, without a systematic analysis of its architectural characteristics, usage patterns, and limitations. This survey reviews Isaac Sim from system and application perspectives, outlining its architecture and comparing it with widely used simulators. We analyze representative studies across five major domains and summarize common usage patterns, particularly in data generation and high-fidelity simulation. We also outline key future directions and challenges, including physics open-world learning, simulation-centric training and practical usability constraints.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. This survey paper reviews NVIDIA Isaac Sim as a GPU-accelerated robotics simulator. It claims to provide the first systematic analysis of the platform's architecture, comparisons to other simulators, usage patterns in five major domains (with emphasis on synthetic data generation and high-fidelity simulation), and limitations, while outlining future directions such as physics open-world learning and simulation-centric training.
Significance. If the coverage and comparisons prove comprehensive and balanced, the survey would be a useful reference for robotics researchers seeking to understand Isaac Sim's distinctive GPU-parallel capabilities and data-generation pipeline relative to prior simulators. The absence of mathematical derivations or fitted models means its value rests entirely on the quality of the literature synthesis and domain analysis.
major comments (2)
- [§4, §5] §4 (Comparisons) and §5 (Domains): the claim that existing surveys treat Isaac Sim 'as one simulator among many' without systematic analysis is load-bearing for the paper's novelty argument, yet the manuscript provides no explicit inclusion/exclusion criteria or search protocol for the 'representative studies' across the five domains; this risks selection bias and undermines the 'systematic' characterization.
- [§3] §3 (Architecture): the assertion that GPU acceleration enables 'large-scale parallel training and physics-accurate modeling' is presented without quantitative scaling data (e.g., number of parallel environments, wall-clock speedup factors, or physics fidelity metrics versus CPU baselines such as MuJoCo or Bullet); such numbers are needed to substantiate the central differentiator.
minor comments (2)
- [Abstract, §1] The abstract and introduction use 'five major domains' without naming them; a table or explicit list early in the paper would improve readability.
- [§6] Future-directions section should distinguish challenges that are Isaac-Sim-specific from those generic to all GPU simulators.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and the recommendation for minor revision. We address each major comment below and will update the manuscript to improve clarity and rigor.
read point-by-point responses
-
Referee: [§4, §5] §4 (Comparisons) and §5 (Domains): the claim that existing surveys treat Isaac Sim 'as one simulator among many' without systematic analysis is load-bearing for the paper's novelty argument, yet the manuscript provides no explicit inclusion/exclusion criteria or search protocol for the 'representative studies' across the five domains; this risks selection bias and undermines the 'systematic' characterization.
Authors: We acknowledge that explicitly documenting the selection process would strengthen the survey's methodological transparency. In the revised manuscript we will add a short subsection (likely in §4) describing the literature search strategy, databases consulted, keywords employed, and inclusion/exclusion criteria used to identify representative studies across the five domains. This addition will directly address the risk of selection bias while preserving the existing domain coverage. revision: yes
-
Referee: [§3] §3 (Architecture): the assertion that GPU acceleration enables 'large-scale parallel training and physics-accurate modeling' is presented without quantitative scaling data (e.g., number of parallel environments, wall-clock speedup factors, or physics fidelity metrics versus CPU baselines such as MuJoCo or Bullet); such numbers are needed to substantiate the central differentiator.
Authors: We agree that concrete quantitative benchmarks would better substantiate the GPU-acceleration claims. The revised §3 will incorporate specific scaling figures and comparative metrics drawn from cited works and official NVIDIA documentation (e.g., parallel environment counts and reported speedups relative to CPU baselines). These additions will be presented as illustrative examples from the literature rather than new experiments. revision: yes
Circularity Check
No significant circularity; survey contains no derivations
full rationale
The paper is a literature survey on NVIDIA Isaac Sim with no equations, predictions, or mathematical derivations. Its central claim is that it supplies a systematic architectural and usage analysis missing from prior surveys; this is presented as additive without invoking self-citation load-bearing uniqueness theorems, fitted inputs renamed as predictions, or ansatzes smuggled via citation. All technical assertions about GPU acceleration and synthetic data are treated as established platform features rather than novel results derived within the paper. The derivation chain is therefore self-contained against external benchmarks with no reductions to inputs by construction.
Axiom & Free-Parameter Ledger
Forward citations
Cited by 1 Pith paper
-
Learning to Fold: prizewinning solution at LeHome Challenge 2026 (1st place online, 2nd offline)
A competition entry for bimanual garment folding won 1st in simulation and 2nd in reality by making a VLA policy predict its own value quantities to drive advantage estimation, failure detection, and action selection.
Reference graph
Works this paper leans on
-
[1]
Cosmos world founda- tion model platform for physical AI.arXiv:2501,
[Agarwalet al., 2025 ] Agarwal et al. Cosmos world founda- tion model platform for physical AI.arXiv:2501,
2025
-
[2]
A systemic survey of the Omniverse platform and its applications in data genera- tion, simulation and metaverse.Frontiers in Computer Sci- ence, 6:1423129,
[Ahmedet al., 2024 ] Ahmed et al. A systemic survey of the Omniverse platform and its applications in data genera- tion, simulation and metaverse.Frontiers in Computer Sci- ence, 6:1423129,
2024
-
[3]
Deformable body based salmon model-for iterative development and testing of equipment within Isaac Sim
[Andreas, 2023] Andreas. Deformable body based salmon model-for iterative development and testing of equipment within Isaac Sim. Master’s thesis, NTNU,
2023
-
[4]
GR00T n1: An open foundation model for generalist humanoid robots
[Bjorcket al., 2025 ] Bjorck et al. GR00T n1: An open foundation model for generalist humanoid robots. arXiv:2503.14734,
Pith/arXiv arXiv 2025
-
[5]
GRADE: Generating realistic and dynamic environments for robotics research with isaac sim.IJRR, page 02783649251346211,
[Bonettoet al., 2023 ] Bonetto et al. GRADE: Generating realistic and dynamic environments for robotics research with isaac sim.IJRR, page 02783649251346211,
2023
-
[6]
Embodied AI in un- structured 3d spaces: Fusing mid and long-range sensing for instruction-aware construction robotics
[Bonyaniet al., 2025 ] Bonyani et al. Embodied AI in un- structured 3d spaces: Fusing mid and long-range sensing for instruction-aware construction robotics
2025
-
[7]
[Chenet al., 2025 ] Chen et al. Task-oriented edge-assisted cross-system design for real-time human-robot interaction in industrial metaverse.arXiv:2508.20664,
arXiv 2025
-
[8]
Pybullet, a Python module for physics simulation for games, robotics and ma- chine learning,
[Coumanset al., 2016 ] Coumans et al. Pybullet, a Python module for physics simulation for games, robotics and ma- chine learning,
2016
-
[9]
CARLA: An open urban driving simulator
[Dosovitskiyet al., 2017 ] Dosovitskiy et al. CARLA: An open urban driving simulator. InConference on robot learning, pages 1–16. PMLR,
2017
-
[10]
ROS- compatible robotics simulators for Industry 4.0 and Indus- try 5.0: A systematic review of trends and technologies
[Flores Gonzalezet al., 2025 ] Flores Gonzalez et al. ROS- compatible robotics simulators for Industry 4.0 and Indus- try 5.0: A systematic review of trends and technologies. Applied Sciences, 15(15):8637,
2025
-
[11]
[Gaoet al., 2026 ] Gao et al. Reinforcement learning for follow-the-leader robotic endoscopic navigation via syn- thetic data.arXiv:2601.02798,
arXiv 2026
-
[12]
Wheeled Lab: Modern sim2real for low-cost, open-source wheeled robotics
[Hanet al., 2025 ] Han et al. Wheeled Lab: Modern sim2real for low-cost, open-source wheeled robotics. InRSS,
2025
-
[13]
Vision-based human aware- ness estimation for enhanced safety and efficiency of AMRs in industrial warehouses
[Hauget al., 2025 ] Haug et al. Vision-based human aware- ness estimation for enhanced safety and efficiency of AMRs in industrial warehouses. InETF A, pages 1–4. IEEE,
2025
-
[14]
Exploring real-time robot simulation in Isaac Sim with a digital twin of a ware- house picking robot
[Horsgaardet al., 2025 ] Horsgaard et al. Exploring real-time robot simulation in Isaac Sim with a digital twin of a ware- house picking robot. B.S. thesis, NTNU,
2025
-
[15]
[Huanget al., 2024 ] Huang et al. ReKep: Spatio-temporal reasoning of relational keypoint constraints for robotic ma- nipulation.arXiv:2409.01652,
Pith/arXiv arXiv 2024
-
[16]
Generation of synthetic data for medical decision support applications
[Hydocket al., 2023 ] Hydock et al. Generation of synthetic data for medical decision support applications. InAIPR, pages 1–7. IEEE,
2023
-
[17]
Decentralized multi-robot shared perception for worker action inference in industrial facilities
[Imranet al., 2024 ] Imran et al. Decentralized multi-robot shared perception for worker action inference in industrial facilities. InICRA,
2024
-
[18]
Digital twin-based cutting tool breakage detection model using synthetic depth map and deep learning
[Jeonget al., 2022 ] Jeong et al. Digital twin-based cutting tool breakage detection model using synthetic depth map and deep learning. InASPEN,
2022
-
[19]
Unity: A general platform for intelligent agents.arXiv:1809.02627,
[Julianiet al., 2018 ] Juliani et al. Unity: A general platform for intelligent agents.arXiv:1809.02627,
arXiv 2018
-
[20]
[Kachaevet al., 2025 ] Kachaev et al. Mind and motion aligned: a joint evaluation IsaacSim benchmark for task planning and low-level policies in mobile manipulation. arXiv:2508.15663,
arXiv 2025
-
[21]
Multi-AGV assisted OPS in warehouse using digital twins and layout compar- ison
[Kagamiet al., 2025 ] Kagami et al. Multi-AGV assisted OPS in warehouse using digital twins and layout compar- ison. InMetaCom, pages 205–212. IEEE,
2025
-
[22]
How far is video gener- ation from world model: A physical law perspective
[Kanget al., 2024 ] Kang et al. How far is video gener- ation from world model: A physical law perspective. arXiv:2411.02385,
Pith/arXiv arXiv 2024
-
[23]
Emerging trends in realis- tic robotic simulations: A comprehensive systematic liter- ature review.IEEE Access, 12:191264–191287,
[Kargaret al., 2024 ] Kargar et al. Emerging trends in realis- tic robotic simulations: A comprehensive systematic liter- ature review.IEEE Access, 12:191264–191287,
2024
-
[24]
Surgical robotics environment in NVIDIA Isaac Sim for robot-assisted suturing
[Kimet al., 2025 ] Kim et al. Surgical robotics environment in NVIDIA Isaac Sim for robot-assisted suturing. InISMR, pages 192–198. IEEE,
2025
-
[25]
Design and use paradigms for Gazebo, an open-source multi-robot simulator
[Koeniget al., 2004 ] Koenig et al. Design and use paradigms for Gazebo, an open-source multi-robot simulator. In IROS, volume 3, pages 2149–2154. IEEE,
2004
-
[26]
Industrial metaverse meets iiot: Low-code platforms for machine-to-machine and human-to-machine integration.Manufacturing Let- ters, 44:1254–1265,
[Koprovet al., 2025 ] Koprov et al. Industrial metaverse meets iiot: Low-code platforms for machine-to-machine and human-to-machine integration.Manufacturing Let- ters, 44:1254–1265,
2025
-
[27]
Behavior-1K: A benchmark for em- bodied AI with 1,000 everyday activities and realistic sim- ulation
[Liet al., 2023 ] Li et al. Behavior-1K: A benchmark for em- bodied AI with 1,000 everyday activities and realistic sim- ulation. InCoRL, pages 80–93. PMLR,
2023
-
[28]
Marladona-towards cooperative team play using multi-agent reinforcement learning
[Liet al., 2025 ] Li et al. Marladona-towards cooperative team play using multi-agent reinforcement learning. In ICRA, pages 15014–15020. IEEE,
2025
-
[29]
[Linet al., 2025 ] Lin et al. VLNVerse: A benchmark for vision-language navigation with versatile, embodied, real- istic simulation and evaluation.arXiv:2512.19021,
arXiv 2025
-
[30]
dARt Vinci: Egocentric data collection for surgical robot learning at scale
[Liuet al., 2025b ] Liu et al. dARt Vinci: Egocentric data collection for surgical robot learning at scale. arXiv:2503.05646,
-
[31]
[Lohet al., 2024 ] Loh et al. AdaVLN: Towards visual lan- guage navigation in continuous indoor environments with moving humans.arXiv:2411.18539,
arXiv 2024
-
[32]
A survey: Learning embodied intelligence from physical simulators and world models
[Longet al., 2025 ] Long et al. A survey: Learning embodied intelligence from physical simulators and world models. arXiv:2507.00917,
arXiv 2025
-
[33]
Robot learning from a physical world model.arXiv:2511.07416,
[Maoet al., 2025 ] Mao et al. Robot learning from a physical world model.arXiv:2511.07416,
arXiv 2025
-
[34]
A large scale dataset for fire detection and segmentation in indoor spaces
[Maricet al., 2022 ] Maric et al. A large scale dataset for fire detection and segmentation in indoor spaces. InICEC- CME, pages 1–8. IEEE,
2022
-
[35]
Cyberbotics ltd
[Michel, 2004] Michel. Cyberbotics ltd. webots™: profes- sional mobile robot simulation.IJARS, 1(1):5,
2004
-
[36]
Orbit: A unified simu- lation framework for interactive robot learning environ- ments.IEEE RA-L, 8(6):3740–3747,
[Mittalet al., 2023 ] Mittal et al. Orbit: A unified simu- lation framework for interactive robot learning environ- ments.IEEE RA-L, 8(6):3740–3747,
2023
-
[37]
SuFIA: language- guided augmented dexterity for robotic surgical assistants
[Moghaniet al., 2024 ] Moghani et al. SuFIA: language- guided augmented dexterity for robotic surgical assistants. InIROS, pages 6969–6976. IEEE,
2024
-
[38]
[Moghaniet al., 2025 ] Moghani et al. SuFIA-BC: Generat- ing high quality demonstration data for visuomotor policy learning in surgical subtasks.arXiv:2504.14857,
arXiv 2025
-
[39]
Investigating the genera- tion of synthetic data for surface defect detection: A com- parative analysis.Procedia CIRP, 130:767–773,
[Monnetet al., 2024 ] Monnet et al. Investigating the genera- tion of synthetic data for surface defect detection: A com- parative analysis.Procedia CIRP, 130:767–773,
2024
-
[40]
Automation in un- structured production environments using Isaac Sim: A flexible framework for dynamic robot adaptability.Pro- cedia CIRP, 130:837–846,
[Nambiaret al., 2024 ] Nambiar et al. Automation in un- structured production environments using Isaac Sim: A flexible framework for dynamic robot adaptability.Pro- cedia CIRP, 130:837–846,
2024
-
[41]
[Nget al., 2023 ] Ng et al. Syntable: A synthetic data genera- tion pipeline for unseen object amodal instance segmenta- tion of cluttered tabletop scenes.arXiv:2307.07333,
arXiv 2023
-
[42]
[Nguyenet al., 2024 ] Nguyen et al. TacEx: Gelsight tactile simulation in isaac sim–combining soft-body and visuo- tactile simulators.arXiv:2411.04776,
arXiv 2024
-
[43]
Efficient synthetic de- fect on 3d object reconstruction and generation pipeline for digital twins smart factory.Sensors,
[Nguyenet al., 2025 ] Nguyen et al. Efficient synthetic de- fect on 3d object reconstruction and generation pipeline for digital twins smart factory.Sensors,
2025
-
[44]
IsaacLabEvalTasks: Bench- marking GR00T n1 policy in isaac lab
[NVIDIA, 2025] NVIDIA. IsaacLabEvalTasks: Bench- marking GR00T n1 policy in isaac lab. https://github.com/ isaac-sim/IsaacLabEvalTasks,
2025
-
[45]
DSR framework: A hybrid approach for accelerated training of AI models in mobile robotics
[Parejaet al., 2025 ] Pareja et al. DSR framework: A hybrid approach for accelerated training of AI models in mobile robotics. InWEA, pages 150–161. Springer,
2025
-
[46]
[Parket al., 2025 ] Park et al. Modality-augmented fine- tuning of foundation robot policies for cross-embodiment manipulation on gr1 and g1.arXiv:2512.01358,
arXiv 2025
-
[47]
[Petersonet al., 2025 ] Peterson et al. A framework for scal- able heterogeneous multi-agent adversarial reinforcement learning in IsaacLab.arXiv:2510.01264,
arXiv 2025
-
[48]
Habitat 3.0: A co-habitat for humans, avatars and robots.arXiv:2310.13724,
[Puiget al., 2023 ] Puig et al. Habitat 3.0: A co-habitat for humans, avatars and robots.arXiv:2310.13724,
arXiv 2023
-
[49]
[Renet al., 2024 ] Ren et al. InfiniteWorld: A unified scal- able simulation framework for general visual-language robot interaction.arXiv:2412.05789,
arXiv 2024
-
[50]
V-REP: A versatile and scalable robot simulation framework
[Rohmeret al., 2013 ] Rohmer et al. V-REP: A versatile and scalable robot simulation framework. InIROS, pages 1321–1326. IEEE,
2013
-
[51]
[Salimpouret al., 2025 ] Salimpour et al. Sim-to-Real trans- fer for mobile robots with reinforcement learning: from NVIDIA Isaac Sim to Gazebo and real ROS 2 robots. arXiv:2501.02902,
arXiv 2025
-
[52]
Utilizing reinforcement learning and computer vision in a Pick-And-Place oper- ation for sorting objects in motion
[SANDet al., 2023 ] SAND et al. Utilizing reinforcement learning and computer vision in a Pick-And-Place oper- ation for sorting objects in motion
2023
-
[53]
Synthetica: Large scale syn- thetic data for robot perception.arXiv:2410.21153,
[Singhet al., 2024 ] Singh et al. Synthetica: Large scale syn- thetic data for robot perception.arXiv:2410.21153,
arXiv 2024
-
[54]
[Taiet al., 2025 ] Tai et al. RealMirror: A comprehensive, open-source vision-language-action platform for embod- ied ai.arXiv:2509.14687,
arXiv 2025
-
[55]
[Taoet al., 2024 ] Tao et al. Maniskill3: Gpu parallelized robotics simulation and rendering for generalizable em- bodied AI.arXiv:2410.00425,
arXiv 2024
-
[56]
Interioragent: Interactive USD interior scenes for Isaac Sim-based simulation,
[Teamet al., 2025 ] Team and Inc. Interioragent: Interactive USD interior scenes for Isaac Sim-based simulation,
2025
-
[57]
Mujoco: A physics en- gine for model-based control
[Todorovet al., 2012 ] Todorov et al. Mujoco: A physics en- gine for model-based control. InIROS. IEEE,
2012
-
[58]
[Wonget al., 2025 ] Wong et al. A survey of robotic naviga- tion and manipulation with physics simulators in the era of embodied AI.arXiv:2505.01458,
Pith/arXiv arXiv 2025
-
[59]
[Wuet al., 2024 ] Wu et al. Robomind: Benchmark on multi- embodiment intelligence normative data for robot manip- ulation.arXiv:2412.13877,
Pith/arXiv arXiv 2024
-
[60]
Orbit-surgical: An open- simulation framework for learning surgical augmented dexterity
[Yuet al., 2024 ] Yu et al. Orbit-surgical: An open- simulation framework for learning surgical augmented dexterity. InICRA, pages 15509–15516. IEEE,
2024
-
[61]
Survey of simulators for deformable objects in robotics.Jornadas de Autom´atica, (46),
[Zafra-Navarroet al., 2025 ] Zafra-Navarro et al. Survey of simulators for deformable objects in robotics.Jornadas de Autom´atica, (46),
2025
-
[62]
[Zhanget al., 2025 ] Zhang et al. AgentWorld: An interac- tive simulation platform for scene construction and mobile robotic manipulation.arXiv:2508.07770,
arXiv 2025
-
[63]
Towards building AI-CPS with NVIDIA Isaac Sim: An industrial benchmark and case study for robotics manipulation
[Zhouet al., 2024 ] Zhou et al. Towards building AI-CPS with NVIDIA Isaac Sim: An industrial benchmark and case study for robotics manipulation. InICSE, pages 263– 274, 2024
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.