Teaching Robots to Say 'I Don't Know' : SENTINEL for Uncertainty-Aware SLAM
Pith reviewed 2026-06-28 06:03 UTC · model grok-4.3
The pith
SENTINEL gives low-cost LiDAR per-scan reliability scores using cross-modal checks to reject bad data in SLAM.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
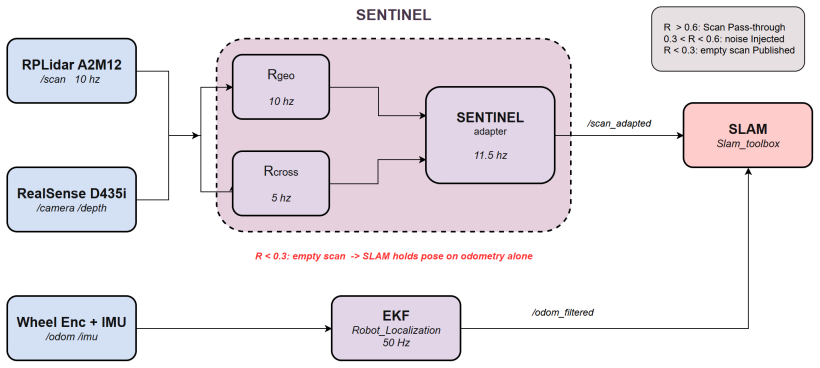
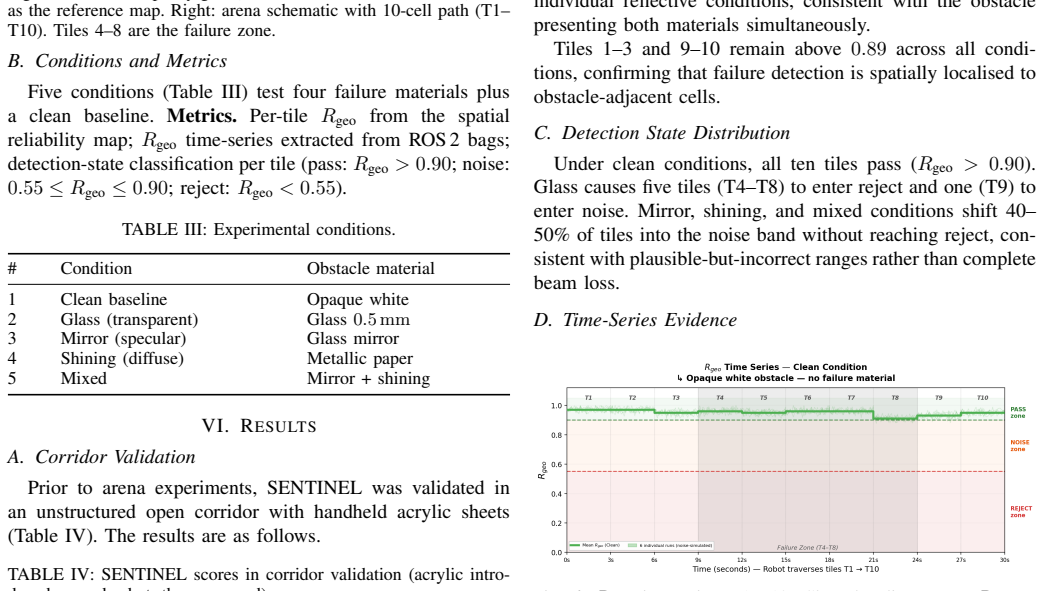
SENTINEL combines geometry-based scan statistics with cross-modal depth consistency between LiDAR and an RGB-D camera to compute a per-scan reliability score between 0 and 1. When the score falls below a threshold, corrupted scans are rejected and the robot falls back to calibrated wheel odometry, preventing silent SLAM corruption. Evaluation on a skid-steer robot with RPLidar and RealSense in a small arena shows clear separation in spatial reliability maps for surfaces including glass, mirror, and shiny paper.
What carries the argument
Per-scan reliability score from fused geometry-based scan statistics and cross-modal depth consistency between LiDAR and RGB-D camera.
If this is right
- Rejected scans prevent corruption of the SLAM map from transparent and reflective surfaces.
- Fallback to wheel odometry maintains robot localization when LiDAR data is unreliable.
- Reliability maps identify areas in the environment prone to sensor failures.
- The method operates without requiring any training data or labeled examples.
- Performance is validated entirely on real hardware since simulation lacks these failure modes.
Where Pith is reading between the lines
- Similar consistency checks could be developed for other sensor pairs in robotics applications.
- This could enable more reliable mapping in educational and low-budget robot deployments.
- Extending the framework to handle dynamic obstacles might further enhance SLAM robustness.
- Applying it in outdoor or larger indoor spaces would test its limits under varied conditions.
Load-bearing premise
The depth consistency between LiDAR and RGB-D camera remains a valid signal for detecting LiDAR measurement failures on different surfaces and lighting conditions.
What would settle it
Finding a scenario in which a LiDAR scan affected by a reflective surface is assigned a high reliability score, incorporated into the map, and leads to SLAM failure without the system detecting the issue.
Figures
read the original abstract
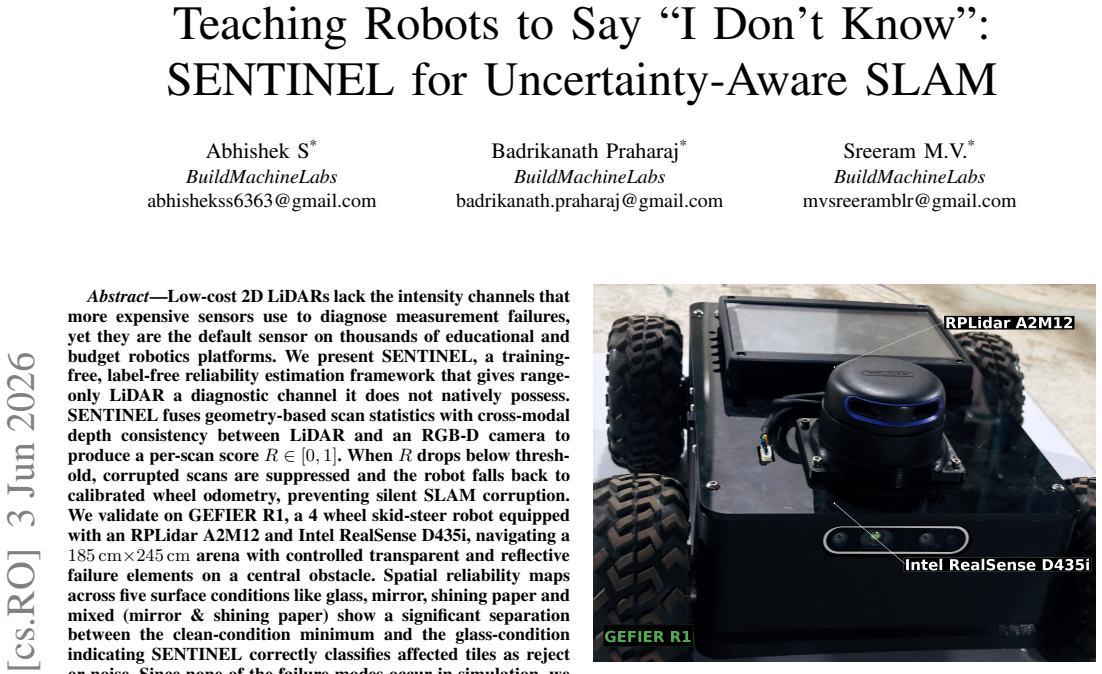
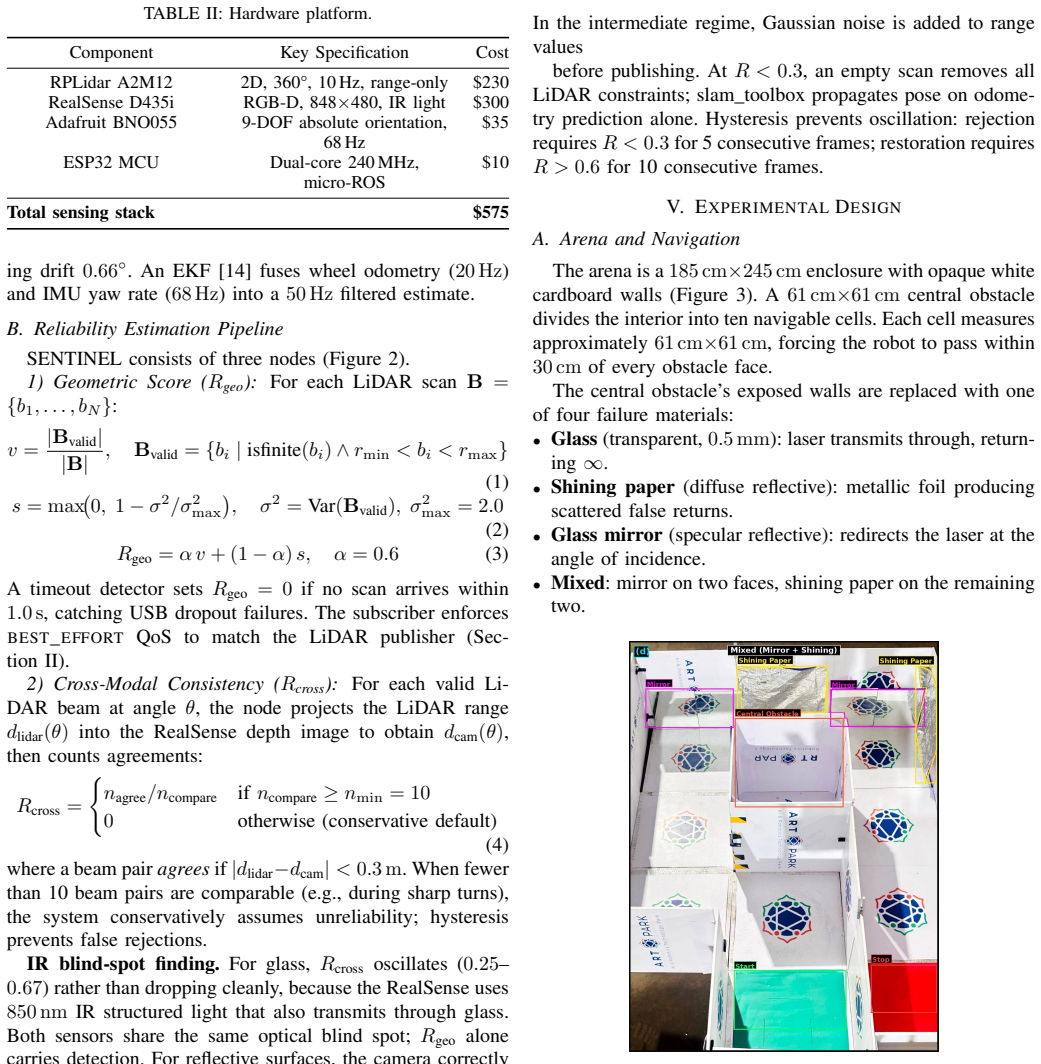
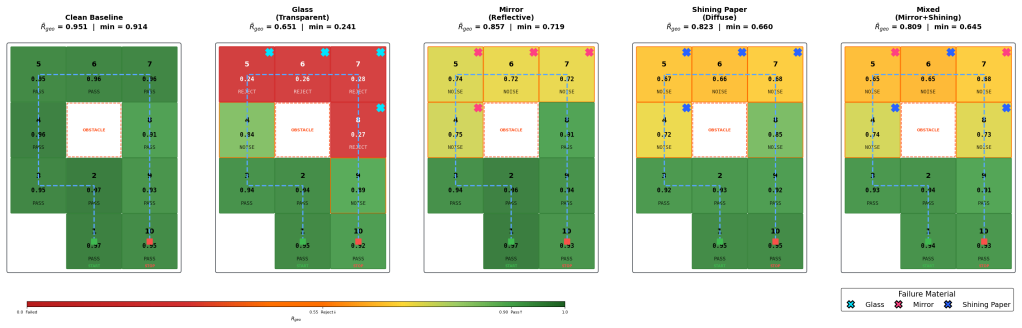
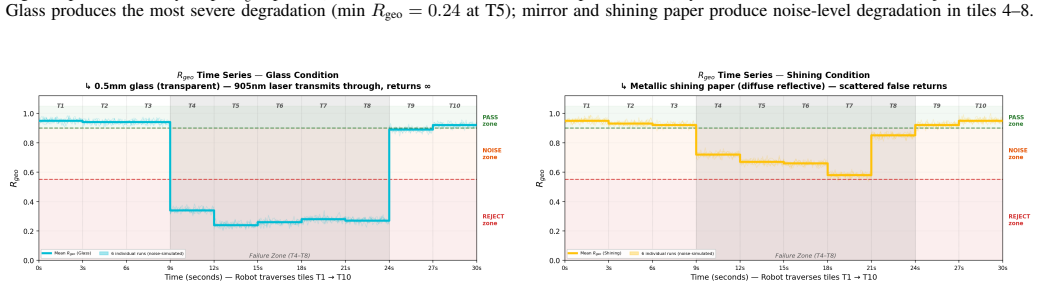
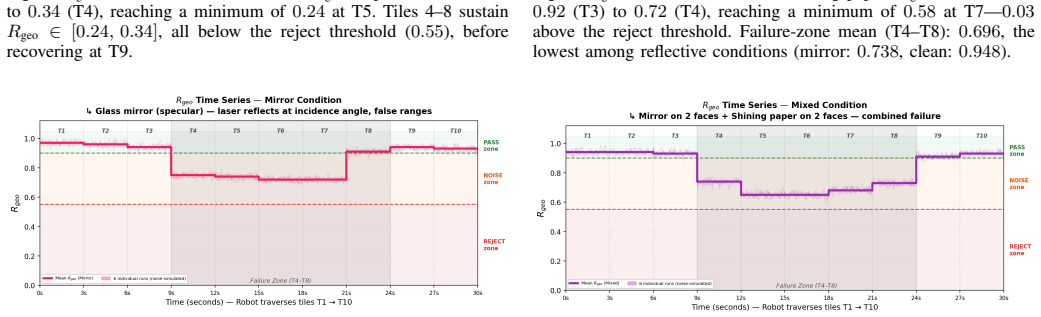
Low-cost 2D LiDARs lack the intensity channel that higher-end sensors use to diagnose measurement failures, yet they are widely used on educational and budget robotics platforms. We present SENTINEL, a training - free, label - free reliability estimation framework that gives range - only LiDAR an effective diagnostic signal. SENTINEL combines geometry-based scan statistics with cross - modal depth consistency between LiDAR and an RGB - D camera to compute a per - scan reliability score between 0 and 1. When the score falls below a threshold, corrupted scans are rejected and the robot falls back to calibrated wheel odometry, preventing silent SLAM corruption. We evaluate SENTINEL on a GEFIER R1 four - wheel skid-steer robot equipped with an RPLidar A2M12 and an Intel RealSense D435i in a 185 cm by 245 cm arena containing controlled transparent and reflective failure elements on a central obstacle. Spatial reliability maps across five surface conditions, including glass, mirror, shiny paper, and a mixed mirror and shiny-paper condition, show clear separation between clean and failure cases, allowing affected regions to be identified as reject or noise. Because these failure modes are absent in simulation, validation is performed entirely on real hardware.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents SENTINEL, a training-free, label-free framework for uncertainty-aware SLAM with low-cost 2D LiDAR. It computes a per-scan reliability score in [0,1] by fusing geometry-based scan statistics with cross-modal depth consistency between an RPLidar A2M12 and RealSense D435i; scans below threshold are rejected in favor of calibrated wheel odometry. Real-hardware evaluation in a 185 cm × 245 cm arena with controlled glass, mirror, shiny paper, and mixed surfaces produces spatial reliability maps that exhibit clear separation between clean and failure cases, enabling identification of reject or noise regions.
Significance. If the cross-modal consistency metric is shown to be robust, SENTINEL would offer a practical diagnostic for silent SLAM corruption on budget platforms lacking intensity channels. The exclusive real-hardware validation on multiple surface conditions is a positive aspect, as the failure modes cannot be simulated.
major comments (2)
- [Abstract / Evaluation] The central claim that spatial reliability maps show 'clear separation' between clean and failure cases (abstract and evaluation) is presented without quantitative metrics such as ROC-AUC, precision-recall at the chosen threshold, false-positive rates on clean scans, or statistical significance tests. This absence makes it impossible to evaluate whether the separation is sufficient for reliable rejection in practice.
- [Method / Evaluation] The reliability score relies on cross-modal depth consistency between LiDAR and the D435i RGB-D camera on glass, mirror, and shiny-paper surfaces. Structured-light/time-of-flight RGB-D sensors are documented to return missing or erroneous depths on precisely these surfaces; if the D435i channel is itself corrupted, the consistency metric cannot reliably isolate LiDAR-specific failures. No ground-truth validation, alternative-sensor comparison, or analysis of D435i behavior on the test surfaces is provided to support the assumption.
minor comments (2)
- [Abstract] The abstract states 'five surface conditions' but does not enumerate them; the full text should list them explicitly for reproducibility.
- [Method] The exact formula or weighting used to combine geometry-based scan statistics with cross-modal consistency into the [0,1] score is not visible in the provided abstract; ensure the manuscript supplies the complete definition with all parameters.
Simulated Author's Rebuttal
We thank the referee for the constructive comments and the recommendation for major revision. We address the major comments below, indicating where we will revise the manuscript and identifying one point that constitutes a standing objection based on the current work.
read point-by-point responses
-
Referee: [Abstract / Evaluation] The central claim that spatial reliability maps show 'clear separation' between clean and failure cases (abstract and evaluation) is presented without quantitative metrics such as ROC-AUC, precision-recall at the chosen threshold, false-positive rates on clean scans, or statistical significance tests. This absence makes it impossible to evaluate whether the separation is sufficient for reliable rejection in practice.
Authors: We agree that the claim of clear separation would be strengthened by quantitative metrics. The current manuscript presents the separation through visual inspection of the spatial reliability maps generated from real-hardware experiments across controlled surface conditions. In the revised manuscript we will add ROC-AUC, precision-recall analysis at the operating threshold, false-positive rates on clean scans, and statistical significance tests computed from the existing per-scan reliability scores and surface-condition labels. revision: yes
- [Method / Evaluation] The reliability score relies on cross-modal depth consistency between LiDAR and the D435i RGB-D camera on glass, mirror, and shiny-paper surfaces. Structured-light/time-of-flight RGB-D sensors are documented to return missing or erroneous depths on precisely these surfaces; if the D435i channel is itself corrupted, the consistency metric cannot reliably isolate LiDAR-specific failures. No ground-truth validation, alternative-sensor comparison, or analysis of D435i behavior on the test surfaces is provided to support the assumption.
Circularity Check
No circularity; reliability score computed directly from sensor data without reduction to fitted inputs or self-citations
full rationale
The paper describes SENTINEL as a training-free, label-free method that computes a per-scan reliability score by combining geometry-based scan statistics with cross-modal depth consistency between LiDAR and RGB-D. No equations, derivations, or parameter-fitting steps are referenced that would make the score equivalent to its inputs by construction. The approach is presented as direct computation on real hardware data across controlled surfaces, with no load-bearing self-citations, uniqueness theorems, or ansatzes imported from prior author work. The central claim remains independent of any internal reduction or renaming of known results.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
DARE-SLAM: Degeneracy-Aware and Resilient Loop Closing in Perceptually-Degraded Environments,
K. Ebadiet al., “DARE-SLAM: Degeneracy-Aware and Resilient Loop Closing in Perceptually-Degraded Environments,”J. Intell. Robot. Syst., vol. 102, no. 1, 2021
2021
-
[2]
DALI-SLAM: Degeneracy-Aware LiDAR-Inertial SLAM with Novel Distortion Correction and Accurate Multi-Constraint Pose Graph Optimization,
W. Wu, C. Chen, B. Yanget al., “DALI-SLAM: Degeneracy-Aware LiDAR-Inertial SLAM with Novel Distortion Correction and Accurate Multi-Constraint Pose Graph Optimization,”ISPRS J. Photogramm. Remote Sens., vol. 221, pp. 92–110, 2025
2025
-
[3]
K. Weerakoonet al., “TOPGN: Real-time Transparent Obstacle Detec- tion using Lidar Point Cloud Intensity for Autonomous Robot Naviga- tion,”arXiv:2408.05608, 2024
-
[4]
Reflection Detection via Plane Optimiza- tion,
R. Zhao and A. Schwertfeger, “Reflection Detection via Plane Optimiza- tion,” inProc. IROS Workshop, 2024
2024
-
[5]
The Reflectance Field Map: Mapping Glass and Specular Surfaces in Dynamic Environments,
P. Fosteret al., “The Reflectance Field Map: Mapping Glass and Specular Surfaces in Dynamic Environments,” inProc. IEEE ICRA, 2023, pp. 4230–4236
2023
-
[6]
LVI-SAM: Tightly-Coupled Lidar-Visual-Inertial Odom- etry via Smoothing and Mapping,
T. Shanet al., “LVI-SAM: Tightly-Coupled Lidar-Visual-Inertial Odom- etry via Smoothing and Mapping,” inProc. IEEE ICRA, 2021, pp. 5692– 5698
2021
-
[7]
ALTER: Learning-on-the-Drive Self-supervised Adapta- tion of Visual Offroad Traversability Models,
E. Chenet al., “ALTER: Learning-on-the-Drive Self-supervised Adapta- tion of Visual Offroad Traversability Models,” inProc. IEEE/RSJ IROS, 2024
2024
-
[8]
RTAB-Map as an Open-Source Lidar and Visual SLAM Library for Large-Scale and Long-Term Online Operation,
M. Labbé and F. Michaud, “RTAB-Map as an Open-Source Lidar and Visual SLAM Library for Large-Scale and Long-Term Online Operation,”J. Field Robot., vol. 36, no. 2, pp. 416–446, 2019
2019
-
[9]
evo: Python Package for the Evaluation of Odometry and SLAM,
M. Grupp, “evo: Python Package for the Evaluation of Odometry and SLAM,” https://github.com/MichaelGrupp/evo, 2017
2017
-
[10]
Past, Present, and Future of Simultaneous Localization and Mapping: Toward the Robust-Perception Age,
C. Cadenaet al., “Past, Present, and Future of Simultaneous Localization and Mapping: Toward the Robust-Perception Age,”IEEE Trans. Robot., vol. 32, no. 6, pp. 1309–1332, 2016
2016
-
[11]
Thrun, W
S. Thrun, W. Burgard, and D. Fox,Probabilistic Robotics. Cambridge, MA: MIT Press, 2005
2005
-
[12]
SLAM Toolbox: SLAM for the Dynamic World,
S. Macenski and I. Jambrecic, “SLAM Toolbox: SLAM for the Dynamic World,”J. Open Source Softw., vol. 6, no. 61, p. 2783, 2021
2021
-
[13]
The Marathon 2: A Navigation System,
S. Macenskiet al., “The Marathon 2: A Navigation System,” inProc. IEEE/RSJ IROS, 2020, pp. 2718–2725
2020
-
[14]
A Generalized Extended Kalman Filter Implementation for the Robot Operating System,
T. Moore and D. Stouch, “A Generalized Extended Kalman Filter Implementation for the Robot Operating System,” inProc. Intell. Auton. Syst. (IAS), 2014
2014
-
[15]
Robot Operating System 2: Design, Architecture, and Uses in the Wild,
S. Macenskiet al., “Robot Operating System 2: Design, Architecture, and Uses in the Wild,”Sci. Robot., vol. 7, no. 66, 2022
2022
-
[16]
Products and Technical Resources,
AutoMind Dynamics, “Products and Technical Resources,” including product specifications, brochures, and demonstration materials. https://automindynamics.com/Templates/products.html
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.