Multi-Camera AR Guidance System for Surgical Instrument Handling and Assembly: Investigating Workload and Efficiency
Pith reviewed 2026-06-28 06:17 UTC · model grok-4.3
The pith
Marker-free AR guidance using multi-camera pose estimation reduces instrument handling time by 21% and workload for scrub nurses.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The marker-free multi-camera AR guidance approach for surgical instruments, built on synthetic-data-trained 6D pose estimation and in-situ AR visualization, can subjectively and objectively improve intraoperative instrumentation performance, particularly for untrained scrub nurses, as shown by significantly reduced perceived workload and 21.3% shorter task completion times in a knee arthroplasty simulation.
What carries the argument
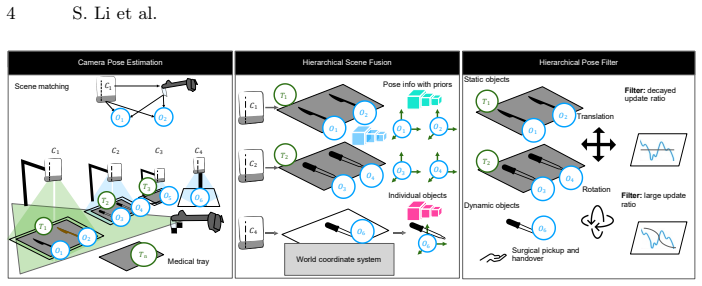
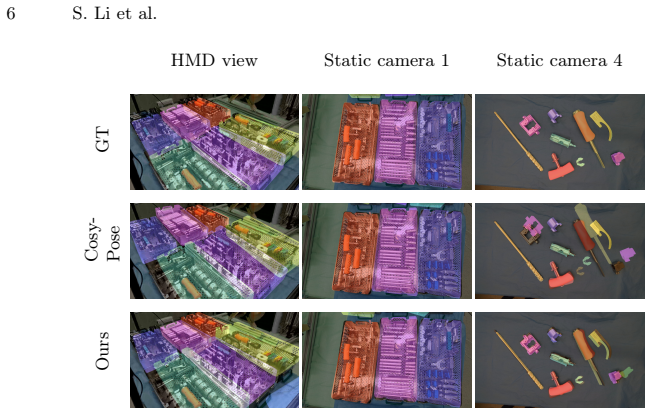
Multi-camera 6D pose estimation network trained purely on synthetic data, which supplies real-time instrument tracking to drive AR tooltip cues and sequential assembly animations selectable by gaze and foot pedal.
If this is right
- The approach outperforms prior 6D pose estimation methods in the technical tests reported.
- Perceived workload drops significantly relative to paper-manual use.
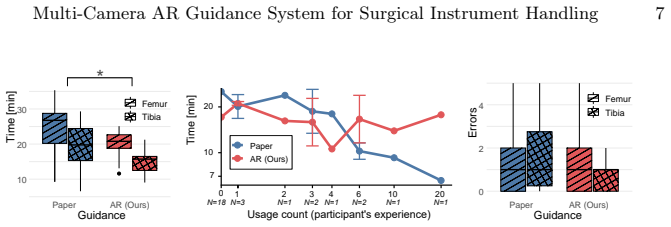
- Task time falls by 21.3 percent (4.76 minutes) in the knee-arthroplasty simulation.
- Nurses with less prior experience on the instrument set show the clearest benefit.
- Error counts stay comparable to the paper-manual baseline.
Where Pith is reading between the lines
- Widespread use might shorten on-the-job training periods for new scrub staff by supplying immediate visual steps.
- The absence of markers could simplify adoption inside sterile fields compared with marker-based alternatives.
- Extending the same synthetic-training pipeline to other instrument sets or procedures would be a direct next test.
- Combining the guidance layer with existing surgical navigation systems could create broader procedural support.
Load-bearing premise
The network trained only on synthetic images will deliver reliable 6D poses in actual surgical lighting and clutter, and the simulation gains will hold in live operations.
What would settle it
A study in real operating rooms that finds no reduction in completion time or workload, or an increase in errors, when the AR system is used instead of paper instructions would falsify the performance claim.
Figures

read the original abstract
The handling and assembly of instruments during surgery imposes high cognitive demands on scrub nurses, particularly when instruments are unfamiliar. We present a supporting guidance system for surgical instrumentation that combines multi-camera 6D pose estimation with augmented reality in-situ visualization on a head-mounted display without the requirement for additional markers. Pose estimation and consecutive camera calibration are achieved through known objects. The 6D pose estimation network is trained purely on synthetic data, aiming for better generalizability and real-world applicability. The AR guidance displays tooltip localization cues and step-wise assembly animations. Via gaze-based selection and a foot pedal, users can switch between assembly steps in intraoperative use. In a technical evaluation, our approach outperforms state-of-art 6D pose estimation. A user study with 29 scrub nurses was conducted in a surgical simulation of knee arthroplasty, comparing the system against a paper manual. AR guidance significantly reduced the perceived workload compared. Objectively, AR guidance reduced task completion time by 21.3\% (4.76 minutes). Specifically, scrub nurses less experienced with the instrument set benefited when using the system. Error frequencies were comparable between conditions. Qualitative feedback highlighted improved process clarity, reduced information overload, and perceived independence. To summarize, our marker-free multi-camera AR guidance approach for surgical instruments can, subjectively and objectively, improve intraoperative instrumentation performance, particularly for untrained scrub nurses.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a marker-free multi-camera AR guidance system for surgical instrument handling and assembly. It combines 6D pose estimation (trained exclusively on synthetic data) with in-situ AR visualizations on a head-mounted display to provide tooltip cues and step-wise assembly animations. A technical evaluation claims outperformance over state-of-the-art pose estimators. A user study with 29 scrub nurses in a knee arthroplasty simulation reports a 21.3% reduction in task completion time (4.76 minutes) and lower perceived workload versus a paper manual baseline, with greater benefits for less experienced participants and comparable error rates.
Significance. If the reported gains hold, the work could improve efficiency and reduce cognitive load for scrub nurses handling unfamiliar instruments. The synthetic-data training strategy is a clear strength for potential generalizability. The empirical user-study design with objective time metrics and subjective workload scores provides concrete, falsifiable evidence in a controlled setting.
major comments (3)
- [Abstract / User Study] Abstract and User Study section: the central claim of 'intraoperative' performance improvement rests on a knee arthroplasty simulation only; no data address real OR variables (variable lighting, specular reflections on metal, blood/fluid occlusion, dynamic team movement, or sterilization constraints) that could degrade 6D pose accuracy or negate usability gains.
- [Abstract] Abstract: the reported 21.3% time reduction and 'significantly reduced' workload lack any mention of the statistical tests performed, exact p-values, effect sizes, or confidence intervals, which are required to support the quantitative claims that underpin the paper's main contribution.
- [Technical Evaluation] Technical Evaluation: outperformance versus SOTA pose estimators is demonstrated only within the same synthetic/simulation environment used for the user study; without real surgical instrument imagery or cross-domain testing, the technical superiority does not yet substantiate the real-world applicability asserted in the abstract.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below, acknowledging the simulation-based nature of the study and proposing textual revisions to improve clarity without overstating the results.
read point-by-point responses
-
Referee: [Abstract / User Study] Abstract and User Study section: the central claim of 'intraoperative' performance improvement rests on a knee arthroplasty simulation only; no data address real OR variables (variable lighting, specular reflections on metal, blood/fluid occlusion, dynamic team movement, or sterilization constraints) that could degrade 6D pose accuracy or negate usability gains.
Authors: We agree that the evaluation is limited to a controlled knee arthroplasty simulation and does not include real OR conditions. The manuscript's abstract and discussion will be revised to explicitly state that results derive from simulation, remove or qualify the term 'intraoperative' where it implies real OR data, and add a dedicated limitations paragraph discussing potential degradation from real-world factors such as lighting, reflections, and occlusions. This is a genuine scope limitation of the current study. revision: partial
-
Referee: [Abstract] Abstract: the reported 21.3% time reduction and 'significantly reduced' workload lack any mention of the statistical tests performed, exact p-values, effect sizes, or confidence intervals, which are required to support the quantitative claims that underpin the paper's main contribution.
Authors: We accept this point. The full paper reports the underlying statistical tests (paired t-tests for time and NASA-TLX scores), but these were omitted from the abstract. We will revise the abstract to include the key statistical details (p-values, effect sizes, and confidence intervals) while respecting length constraints. revision: yes
-
Referee: [Technical Evaluation] Technical Evaluation: outperformance versus SOTA pose estimators is demonstrated only within the same synthetic/simulation environment used for the user study; without real surgical instrument imagery or cross-domain testing, the technical superiority does not yet substantiate the real-world applicability asserted in the abstract.
Authors: The technical evaluation was intentionally conducted in the synthetic domain matching the training data and user-study setup. We will revise the technical evaluation section and abstract to clarify this scope, add discussion of the domain gap, and note that real surgical imagery testing is planned as future work. The synthetic-only training remains a deliberate design choice for generalizability, but we agree it does not yet demonstrate cross-domain superiority. revision: partial
Circularity Check
No circularity; empirical evaluation and user study are independent of self-referential fits or derivations.
full rationale
The paper describes a marker-free multi-camera AR system with 6D pose estimation trained on synthetic data, followed by a technical comparison to SOTA estimators and a controlled user study with 29 scrub nurses measuring time (21.3% reduction), workload, and errors against a paper manual baseline in knee arthroplasty simulation. No mathematical derivation chain, fitted parameters renamed as predictions, self-citation load-bearing premises, or ansatzes appear in the provided abstract or described claims. All quantitative results derive from direct empirical measurements rather than reducing to inputs by construction. This is a standard applied systems paper with self-contained experimental validation.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Synthetic data training enables reliable generalization of 6D pose estimation to real surgical instrument images without markers
- domain assumption The surgical simulation of knee arthroplasty accurately represents real intraoperative instrument handling and assembly demands
Reference graph
Works this paper leans on
-
[1]
In: International Conference on Medical Image Computing and Computer-Assisted Intervention
Acar, A., Atoum, J., Connor, P.S., Pierre, C., Lynch, C.N., Kavoussi, N.L., Wu, J.Y.: Navius: navigated augmented reality visualization for ureteroscopic surgery. In: International Conference on Medical Image Computing and Computer-Assisted Intervention. pp. 433–443. Springer (2025)
2025
-
[2]
International Jour- nal of Computer Assisted Radiology and Surgery pp
Agethen, N., Rosskamp, J., Koller, T.L., Klein, J., Zachmann, G.: Recurrent multi- view 6dof pose estimation for marker-less surgical tool tracking. International Jour- nal of Computer Assisted Radiology and Surgery pp. 1–11 (2025)
2025
-
[3]
Blattgerste, J., Renner, P., Strenge, B., Pfeiffer, T.: In-Situ Instructions Exceed Side-by-SideInstructionsinAugmentedRealityAssistedAssembly.In:Proceedings of the 11th PErvasive Technologies Related to Assistive Environments Conference. pp. 133–140. ACM, Corfu Greece (Jun 2018)
2018
-
[4]
Contributors, M.: Openmmlab pose estimation toolbox and benchmark.https: //github.com/open-mmlab/mmpose(2020)
2020
-
[5]
International Journal of Computer Assisted Radiology and Surgery pp
Cramer, E., Kucharski, A., Kreimeier, J., Andreß, S., Li, S., Walk, C., Merkl, F., Högl, J., Wucherer, P., Stefan, P., others: Requirement analysis for an AI-based AR assistancesystemforsurgicaltoolsintheoperatingroom:stakeholderrequirements and technical perspectives. International Journal of Computer Assisted Radiology and Surgery pp. 1–10 (2024), publi...
2024
-
[6]
IEEE Journal of Biomedical and Health Informatics27(11), 5405–5417 (2023) 10 S
Demir, K.C., Schieber, H., Weise, T., Roth, D., May, M., Maier, A., Yang, S.H.: Deep learning in surgical workflow analysis: a review of phase and step recognition. IEEE Journal of Biomedical and Health Informatics27(11), 5405–5417 (2023) 10 S. Li et al
2023
-
[7]
Denninger, M., Sundermeyer, M., Winkelbauer, D., Olefir, D., Hodan, T., Zidan, Y., Elbadrawy, M., Knauer, M., Katam, H., Lodhi, A.: BlenderProc: Reducing the Reality Gap with Photorealistic Rendering (2020)
2020
-
[8]
arXiv preprint arXiv:2211.02648 (2022)
Dibene, J.C., Dunn, E.: Hololens 2 sensor streaming. arXiv preprint arXiv:2211.02648 (2022)
-
[9]
YOLOX: Exceeding YOLO Series in 2021
Ge, Z., Liu, S., Wang, F., Li, Z., Sun, J.: Yolox: Exceeding yolo series in 2021. arXiv preprint arXiv:2107.08430 (2021)
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[10]
BMJ open 9(5), e026410 (May 2019)
Göras, C., Olin, K., Unbeck, M., Pukk-Härenstam, K., Ehrenberg, A., Tessma, M.K., Nilsson, U., Ekstedt, M.: Tasks, multitasking and interruptions among the surgical team in an operating room: a prospective observational study. BMJ open 9(5), e026410 (May 2019)
2019
-
[11]
Hein, J., Cavalcanti, N., Suter, D., Zingg, L., Carrillo, F., Calvet, L., Farshad, M., Navab, N., Pollefeys, M., Fürnstahl, P.: Next-generation surgical navigation: Marker-less multi-view6dof poseestimation ofsurgicalinstruments.MedicalImage Analysis103, 103613 (2025)
2025
-
[12]
In: International Conference on Medical Image Computing and Computer-Assisted Intervention
Hogenkamp, M., Stauffer, T., Lohmeyer, Q., Meboldt, M.: 6d object pose tracking for orthopedic surgical training using visual-inertial sensor fusion. In: International Conference on Medical Image Computing and Computer-Assisted Intervention. pp. 13–23. Springer (2025)
2025
-
[13]
In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition
Hu, Y., Speierer, S., Jakob, W., Fua, P., Salzmann, M.: Wide-depth-range 6d ob- ject pose estimation in space. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. pp. 15870–15879 (2021)
2021
-
[14]
2014 IEEE Vir- tual Reality, VR 2014 - Proceedings pp
Khuong, B.M., Kiyokawa, K., Miller, A., La Viola, J.J., Mashita, T., Takemura, H.: The effectiveness of an AR-based context-aware assembly support system in object assembly: 21st IEEE Virtual Reality Conference, VR 2014. 2014 IEEE Vir- tual Reality, VR 2014 - Proceedings pp. 57–62 (2014), publisher: IEEE Computer Society
2014
-
[15]
In: 2022 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW)
Kleinbeck, C., Schieber, H., Andress, S., Krautz, C., Roth, D.: ARTFM: Aug- mented Reality Visualization of Tool Functionality Manuals in Operating Rooms. In: 2022 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW). pp. 736–737 (Mar 2022)
2022
-
[16]
In: 2024 IEEE International Symposium on Mixed and Augmented Reality Adjunct (ISMAR-Adjunct)
Kreimeier, J., Schieber, H., Li, S., Martin-Gomez, A., Roth, D.: Visual Guidance for Assembly Processes. In: 2024 IEEE International Symposium on Mixed and Augmented Reality Adjunct (ISMAR-Adjunct). pp. 652–653 (Oct 2024), iSSN: 2771-1110
2024
-
[17]
In: European Conference on Computer Vision
Labbé, Y., Carpentier, J., Aubry, M., Sivic, J.: Cosypose: Consistent multi-view multi-object 6d pose estimation. In: European Conference on Computer Vision. pp. 574–591. Springer (2020)
2020
-
[18]
In: 2024 IEEE Conference Virtual Reality and 3D User Interfaces (VR)
Li, S., Schieber, H., Corell, N., Egger, B., Kreimeier, J., Roth, D.: GBOT: Graph- Based 3D Object Tracking for Augmented Reality-Assisted Assembly Guidance. In: 2024 IEEE Conference Virtual Reality and 3D User Interfaces (VR). pp. 513– 523 (Mar 2024), iSSN: 2642-5254
2024
-
[19]
IEEE Transactions on Visualization and Computer Graphics (2026)
Li, S., Schieber, H., Waldow, K., Busam, B., Kreimeier, J., Roth, D.: Multicam: On-the-fly multi-camera pose estimation using spatiotemporal overlaps of known objects. IEEE Transactions on Visualization and Computer Graphics (2026)
2026
-
[20]
Medical Image Analysis91, 103027 (2024)
Liebmann, F., von Atzigen, M., Stütz, D., Wolf, J., Zingg, L., Suter, D., Caval- canti, N.A., Leoty, L., Esfandiari, H., Snedeker, J.G., et al.: Automatic registration with continuous pose updates for marker-less surgical navigation in spine surgery. Medical Image Analysis91, 103027 (2024)
2024
-
[21]
Lu, P., Jiang, T., Li, Y., Li, X., Chen, K., Yang, W.: RTMO: Towards high- performance one-stage real-time multi-person pose estimation (2023) Multi-Camera AR Guidance System for Surgical Instrument Handling 11
2023
-
[22]
IEEE Transactions on Visualization and Computer Graphics30(7), 3578–3593 (2023)
Martin-Gomez, A., Li, H., Song, T., Yang, S., Wang, G., Ding, H., Navab, N., Zhao, Z., Armand, M.: Sttar: surgical tool tracking using off-the-shelf augmented reality head-mounted displays. IEEE Transactions on Visualization and Computer Graphics30(7), 3578–3593 (2023)
2023
-
[23]
The Spine Journal20(4), 621–628 (2020)
Müller, F., Roner, S., Liebmann, F., Spirig, J.M., Fürnstahl, P., Farshad, M.: Aug- mented reality navigation for spinal pedicle screw instrumentation using intraop- erative 3d imaging. The Spine Journal20(4), 621–628 (2020)
2020
-
[24]
Computer Vision and Image Understanding p
Schieber, H., Demir, K.C., Kleinbeck, C., Yang, S.H., Roth, D.: Indoor synthetic data generation: A systematic review. Computer Vision and Image Understanding p. 103907 (2024)
2024
-
[25]
In: 2024 IEEE International Symposium on Mixed and Augmented Reality (ISMAR)
Schieber, H., Li, S., Corell, N., Beckerle, P., Kreimeier, J., Roth, D.: ASDF: Assem- bly State Detection Utilizing Late Fusion by Integrating 6D Pose Estimation. In: 2024 IEEE International Symposium on Mixed and Augmented Reality (ISMAR). pp. 190–199 (Oct 2024), iSSN: 2473-0726
2024
-
[26]
Intensive and Critical Care Nursing46, 64–69 (Jun 2018)
Tubbs-Cooley, H.L., Mara, C.A., Carle, A.C., Gurses, A.P.: The NASA Task Load Index as a measure of overall workload among neonatal, paediatric and adult in- tensive care nurses. Intensive and Critical Care Nursing46, 64–69 (Jun 2018)
2018
-
[27]
(WHO), W.H.O.: Global Patient Safety Action Plan 2021-2030,https: //www.who.int/teams/integrated-health-services/patient-safety/policy/ global-patient-safety-action-plan
2021
-
[28]
In: International Conference on Medical Image Computing and Computer-Assisted Intervention
Yang, Q., Li, F., Xu, J., Liu, Z., Sridhar, S., Jin, W., Du, J., Heiselman, J., Miga, M., Topf, M., et al.: Augmented reality-based guidance with deformable regis- tration in head and neck tumor resection. In: International Conference on Medical Image Computing and Computer-Assisted Intervention. pp. 45–54. Springer (2025)
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.