A Primal--Dual Penalty Algorithm and Optimal Control of the Double Integrator
Pith reviewed 2026-06-27 23:49 UTC · model grok-4.3
The pith
A primal-dual penalty scheme yields closed-form optimal controls and dual functions for the double integrator across all boundary conditions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The proposed duality-based framework enables derivation of closed-form expressions for the associated dual functions as well as for the optimal control variables, and provides a complete characterization of the least exact penalty parameter for this problem.
What carries the argument
The primal-dual penalty scheme applied uniformly to the double integrator, which produces explicit dual functions and optimal controls for all admissible boundary conditions.
If this is right
- Closed-form expressions exist for dual functions and optimal control variables under every admissible boundary condition.
- The least exact penalty parameter admits a complete characterization for the double integrator problem.
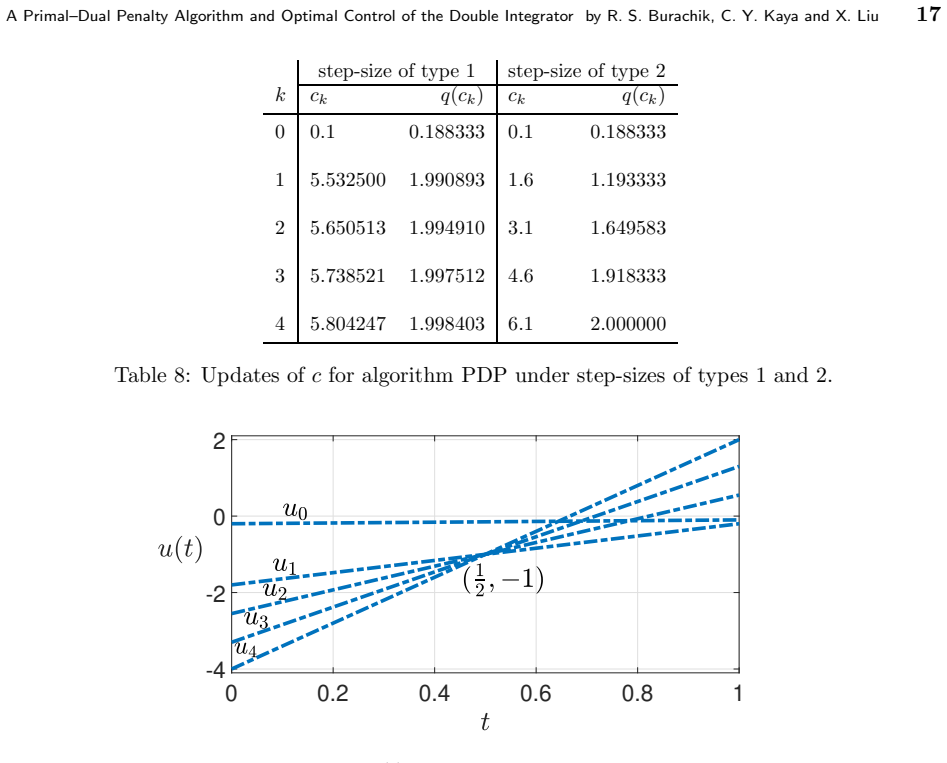
- Iteration dynamics of the algorithm can be examined explicitly through trajectories of the constraint functions.
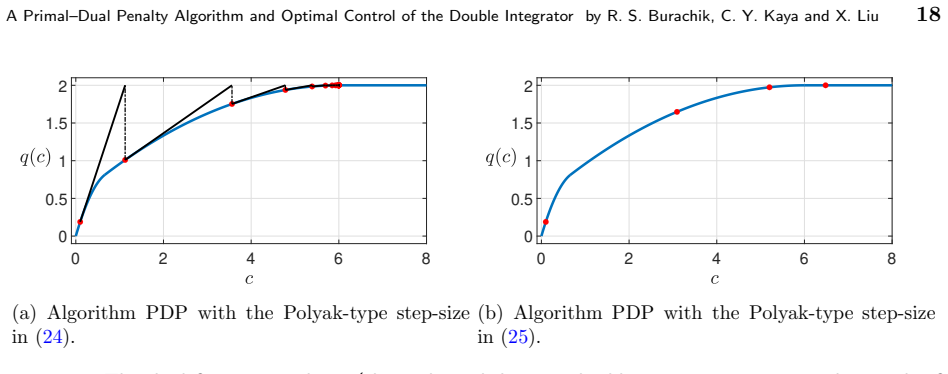
- The two step-size rules can be compared directly against Polyak-type alternatives for this class of problems.
Where Pith is reading between the lines
- The uniform closed-form treatment may extend to other linear dynamical systems if the same penalty framework is applied without case splits.
- The explicit penalty parameter characterization could guide selection of exact penalty values in numerical solvers for similar optimal control problems.
Load-bearing premise
The double integrator dynamics and all admissible boundary conditions permit a uniform closed-form treatment by the primal-dual penalty scheme without requiring case-specific adjustments.
What would settle it
A specific boundary condition in which the derived closed-form dual function or optimal control fails to satisfy the problem's necessary optimality conditions, or the characterized least penalty parameter does not render the method exact.
Figures
read the original abstract
We investigate the behaviour of a primal--dual penalty scheme applied to all possible instances, i.e., boundary conditions, of an optimal control problem involving the double integrator. The proposed duality-based framework enables us to derive closed-form expressions for the associated dual functions as well as for the optimal control variables. Furthermore, we provide a complete characterization of the least exact penalty parameter for this problem. The iteration dynamics of the algorithm are examined by constructing and analyzing the trajectories of the constraint functions for every admissible instance of the problem. Finally, we compare the two step-size rules employed in our primal--dual algorithm with two alternative Polyak-type step-size strategies.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript applies a primal-dual penalty scheme to the double-integrator optimal control problem for every admissible pair of boundary conditions. It derives closed-form expressions for the dual functions and optimal controls, gives a complete characterization of the least exact penalty parameter, constructs and analyzes trajectories of the constraint functions under the iteration, and compares two step-size rules against Polyak-type alternatives.
Significance. If the claimed closed-form duals and uniform least-exact-penalty formula hold without hidden case distinctions, the work would supply an explicit, fully worked example of exact-penalty behavior on a canonical linear-quadratic problem whose optimal controls are bang-bang or singular. The trajectory analysis of the constraint functions would also be a useful addition to the literature on primal-dual dynamics.
major comments (2)
- [Abstract / least-exact-penalty section] Abstract and the section presenting the least-exact-penalty characterization: the claim of a single, complete formula that works for every admissible boundary condition is load-bearing. For the double integrator the optimal control structure (number and location of switches, presence of singular arcs) changes with the initial/final states and free final time; any derivation that produces one closed expression must either enumerate the combinatorial cases or prove that the penalty term automatically selects the correct regime. The manuscript must exhibit the explicit formula and verify it on at least one instance from each structural class (e.g., zero-switch, one-switch, singular-arc cases).
- [Derivation of dual functions and controls] Section deriving the closed-form dual functions and optimal controls: the derivations appear to start from the problem structure, yet the skeptic note correctly flags that uniformity across all boundary conditions is the central assumption. If the explicit expressions were obtained under an implicit interior-arc or fixed-switch assumption, they do not constitute the advertised “complete characterization.” Concrete verification on boundary data that induce qualitatively different switching structures is required.
minor comments (2)
- Notation for the penalty parameter and dual variables should be introduced once and used consistently; several passages repeat definitions that could be referenced by equation number.
- The comparison of step-size rules would benefit from a short table summarizing iteration counts or final residuals for each rule on the same set of test boundary conditions.
Simulated Author's Rebuttal
We thank the referee for the thorough review and for highlighting the importance of verifying uniformity across switching structures. We agree that concrete examples from each structural class will improve clarity and have prepared revisions accordingly. Our point-by-point responses follow.
read point-by-point responses
-
Referee: [Abstract / least-exact-penalty section] Abstract and the section presenting the least-exact-penalty characterization: the claim of a single, complete formula that works for every admissible boundary condition is load-bearing. For the double integrator the optimal control structure (number and location of switches, presence of singular arcs) changes with the initial/final states and free final time; any derivation that produces one closed expression must either enumerate the combinatorial cases or prove that the penalty term automatically selects the correct regime. The manuscript must exhibit the explicit formula and verify it on at least one instance from each structural class (e.g., zero-switch, one-switch, singular-arc cases).
Authors: The closed-form expressions for the dual functions and the least-exact-penalty parameter are obtained by directly solving the stationarity conditions of the dual problem for the double-integrator dynamics; the resulting formulas contain no hidden case distinctions and automatically adapt to the number and location of switches (including singular arcs) through the dependence on the boundary data. The explicit formula for the least exact penalty parameter is stated in Theorem 4.1 and is already written as a single expression valid for all admissible pairs. To make this transparent, we will insert a new subsection (after the main characterization) that evaluates the formula and the recovered optimal controls on three representative boundary conditions, one from each structural class, and confirms agreement with the known bang-bang or singular solutions of the original problem. revision: yes
-
Referee: [Derivation of dual functions and controls] Section deriving the closed-form dual functions and optimal controls: the derivations appear to start from the problem structure, yet the skeptic note correctly flags that uniformity across all boundary conditions is the central assumption. If the explicit expressions were obtained under an implicit interior-arc or fixed-switch assumption, they do not constitute the advertised “complete characterization.” Concrete verification on boundary data that induce qualitatively different switching structures is required.
Authors: The derivations in Section 3 begin from the general necessary conditions for the penalized problem (no a-priori restriction on the number or location of switches) and solve the resulting two-point boundary-value problem in closed form by exploiting the linear dynamics and quadratic cost; the dual variables adjust continuously with the boundary data, thereby selecting the correct regime without enumeration. The uniformity is therefore a consequence of the derivation rather than an assumption. As noted above, we will add explicit numerical checks on boundary data that produce zero-switch, one-switch, and singular-arc solutions to demonstrate that the same closed-form expressions recover the correct controls in each case. revision: yes
Circularity Check
Derivations start from problem data and algorithm definition; no reduction to self-defined quantities or self-citation chains
full rationale
The abstract and available description indicate that the primal-dual penalty scheme is applied directly to the double-integrator dynamics and all admissible boundary conditions. Closed-form dual functions and the least exact penalty parameter are derived from the problem structure and the penalty formulation itself. No equations or claims are shown to define a quantity in terms of its own output, fit a parameter to a subset and rename it a prediction, or rely on a load-bearing self-citation whose content is unverified outside the paper. The iteration analysis and step-size comparisons are presented as examinations of the constructed trajectories, not as tautological restatements. This satisfies the self-contained criterion with no exhibited circular steps.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Splitting Algor ithms, Modern Operator Theory, and Applications,
H.H. Bauschke, R.S. Burachik, and C.Y. Kaya, Constraint splitting and projection methods for optimal control of double integrator . In: H. H. Bauschke, R. S. Burachik and D. R. Luke, “Splitting Algor ithms, Modern Operator Theory, and Applications,” Springer Nature, Swit zerland, pp. 45–68, 2019
2019
-
[2]
Burachik, B.I
R.S. Burachik, B.I. Caldwell, C.Y. Kaya, and W.M. Moursi, Optimal con trol duality and the Douglas– Rachford algorithm, SIAM J Control Optim , 62, 680–698 (2024)
2024
-
[3]
R.S. Burachik, B.I. Caldwell, C.Y. Kaya, and W.M. Moursi, Best appro ximation optimal control for infea- sible double integrator and Douglas–Rachford algorithm, arXiv, 2026. https://arxiv.org/abs/2602.07851
arXiv 2026
-
[4]
Burachik, W.P
R.S. Burachik, W.P. Freire, and C.Y. Kaya, Interior epigraph direc tions method for nonsmooth and nonconvex optimization via generalized augmented Lagrangian dualit y, J Global Optim , 60(3), 501–529 (2014)
2014
-
[5]
Burachik, R.N
R.S. Burachik, R.N. Gasimov, N.A. Ismayilova, and C.Y. Kaya, On a mo dified subgradient algorithm for dual problems via sharp augmented Lagrangian, J Global Optim , 34, 55–78 (2006)
2006
-
[6]
Burachik, A.N
R.S. Burachik, A.N. Iusem, and J.G. Melo, A primal dual modified sub gradient algorithm with sharp Lagrangian, J Global Optim. , 46, 55–78 (2010)
2010
-
[7]
Burachik, A.N
R.S. Burachik, A.N. Iusem and J.G. Melo, An inexact modified subgra dient algorithm for primal–dual problems via Augmented Lagrangians, J Optim Theory Appl , 157: 108–131 (2013)
2013
-
[8]
Burachik and C.Y
R.S. Burachik and C.Y. Kaya, A deflected subgradient method usin g a general augmented Lagrangian duality with implications on penalty methods. In: R.S. Burachik, Yao, J .C. (eds.) Variational Analysis and Generalized Differentiation in Optimization and Contro l, Springer Optimization and Its Applica- tions, 47: 109–132, Springer, New York, (2010)
2010
-
[9]
Burachik and C.Y
R.S. Burachik and C.Y. Kaya, An augmented penalty function meth od with penalty parameter updates for nonconvex optimization, Nonlinear Anal Theory Methods Appl , 75, 1158–1167 (2012). A Primal–Dual Penalty Algorithm and Optimal Control of the D ouble Integrator by R. S. Burachik, C. Y. Kaya and X. Liu 33
2012
-
[10]
Burachik, C.Y
R.S. Burachik, C.Y. Kaya, and X. Liu, A primal–dual algorithm as ap plied to optimal control problems, Pure Appl Funct Anal , 8, 1301–1331 (2023)
2023
-
[11]
Burachik, C.Y
R.S. Burachik, C.Y. Kaya and M. Mammadov, An inexact modified su bgradient algorithm for nonconvex optimization, Comput Optim Appl , 45, 1–24 (2010)
2010
-
[12]
Burachik, C.Y
R.S. Burachik, C.Y. Kaya, and W.M. Moursi, Infeasible and critically feasible optimal control, J Optim Theory Appl , 203, 1219–1245 (2024)
2024
-
[13]
Burachik, C.Y
R.S. Burachik, C.Y. Kaya, and C.J. Price, A primal–dual penalty me thod via rounded weighted- ℓ1 Lagrangian duality, Optimization, 71, 3981-4017 (2022)
2022
-
[14]
R.S. Burachik and X. Liu, An inexact deflected subgradient algor ithm in infinite dimensional spaces, arXiv, https://arxiv.org/abs/2302.02072, 2023
arXiv 2023
-
[15]
Burden, J.D
R.L. Burden, J.D. Faires, Numerical Analysis, 9th edition. Thompson Brooks/Cole, Belmont, 2011
2011
-
[16]
Brezis, Functional Analysis, Sobolev Spaces and Partial Differenti al Equations , Springer, Berlin, 2011
H. Brezis, Functional Analysis, Sobolev Spaces and Partial Differenti al Equations , Springer, Berlin, 2011
2011
-
[17]
Clarke, Optimization and Nonsmooth Analysis , Classics in Applied Mathematics, SIAM Publica- tions, PA, USA, 1990
F.H. Clarke, Optimization and Nonsmooth Analysis , Classics in Applied Mathematics, SIAM Publica- tions, PA, USA, 1990
1990
-
[18]
R.M. Corless and C.Y. Kaya, Minimizing residuals in ODE integration us ing optimal control. Numer Algor (2026). https://doi.org/10.1007/s11075-026-02348-1
-
[19]
Corless, C.Y
R.M. Corless, C.Y. Kaya, and R.H.C. Moir, Optimal residuals and the Dahlquist test problem. Numer Algor, 81, 1253–1274 (2019)
2019
-
[20]
Dennis Jr and R.B
J.E. Dennis Jr and R.B. Schnabel, Numerical Methods for Unconstrained Optimization and Nonl inear Equations, Prentice Hall, Englewood Cliffs, NJ, 1983
1983
-
[21]
Dontchev, Best interpolation in a strip, J Approx Theory , 73, 334–342 (1993)
A.L. Dontchev, Best interpolation in a strip, J Approx Theory , 73, 334–342 (1993)
1993
-
[22]
Ermol’ev, Methods of solution of nonlinear extremal problem s
Y.M. Ermol’ev, Methods of solution of nonlinear extremal problem s. Cybernetics, 2(4), 1–14 (1966)
1966
-
[23]
Fletcher, Practical methods of optimization , John Wiley & Sons, 2013
R. Fletcher, Practical methods of optimization , John Wiley & Sons, 2013
2013
-
[24]
Gasimov, Augmented Lagrangian duality and nondifferentiab le optimization methods in nonconvex programming, J Global Optim , 24: 187–203 (2002)
R.N. Gasimov, Augmented Lagrangian duality and nondifferentiab le optimization methods in nonconvex programming, J Global Optim , 24: 187–203 (2002)
2002
-
[25]
Kaya, Optimal control of the double integrator with minimum total variation
C.Y. Kaya, Optimal control of the double integrator with minimum total variation. J Optim Theory Appl, 185, 966–981 (2020)
2020
-
[26]
X. Liu, An Inexact Deflected Subgradient Algorithm with Applicatio ns to Op- timal Control Problems , PhD thesis, University of South Australia (2022). https://find.library.unisa.edu.au/discovery/delivery/61USOUTHAUS INST:UNISA/12247434370001831
arXiv 2022
-
[27]
Locatelli, Optimal Control of a Double Integrator: A Primer on Maximum P rinciple, Springer, Switzerland, 2017
A. Locatelli, Optimal Control of a Double Integrator: A Primer on Maximum P rinciple, Springer, Switzerland, 2017
2017
-
[28]
Nocedal and S
J. Nocedal and S. Wright, Numerical optimization, Springer Science & Business Media 2006
2006
-
[29]
Opfer and H.J
G. Opfer and H.J. Oberle, The derivation of cubic splines with obst acles by methods of optimization and optimal control, Numer Math , 52, 17–31 (1988)
1988
-
[30]
Polyak, A general method of solving extremum problems, Soviet Mat , 8, 593-–597 (1967)
B.T. Polyak, A general method of solving extremum problems, Soviet Mat , 8, 593-–597 (1967)
1967
-
[31]
Schirotzek, Nonsmooth Analysis, Springer-Verlag, Berlin, 2007
W. Schirotzek, Nonsmooth Analysis, Springer-Verlag, Berlin, 2007
2007
-
[32]
Wellstead, Introduction to Physical System Modelling , Control Systems Principles, 2005, and Aca- demic Press, London, 1979
P.E. Wellstead, Introduction to Physical System Modelling , Control Systems Principles, 2005, and Aca- demic Press, London, 1979. https://scispace.com/pdf/introduction-to-physical-system-m odelling-4m5jkw4dob.pdf
2005
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.