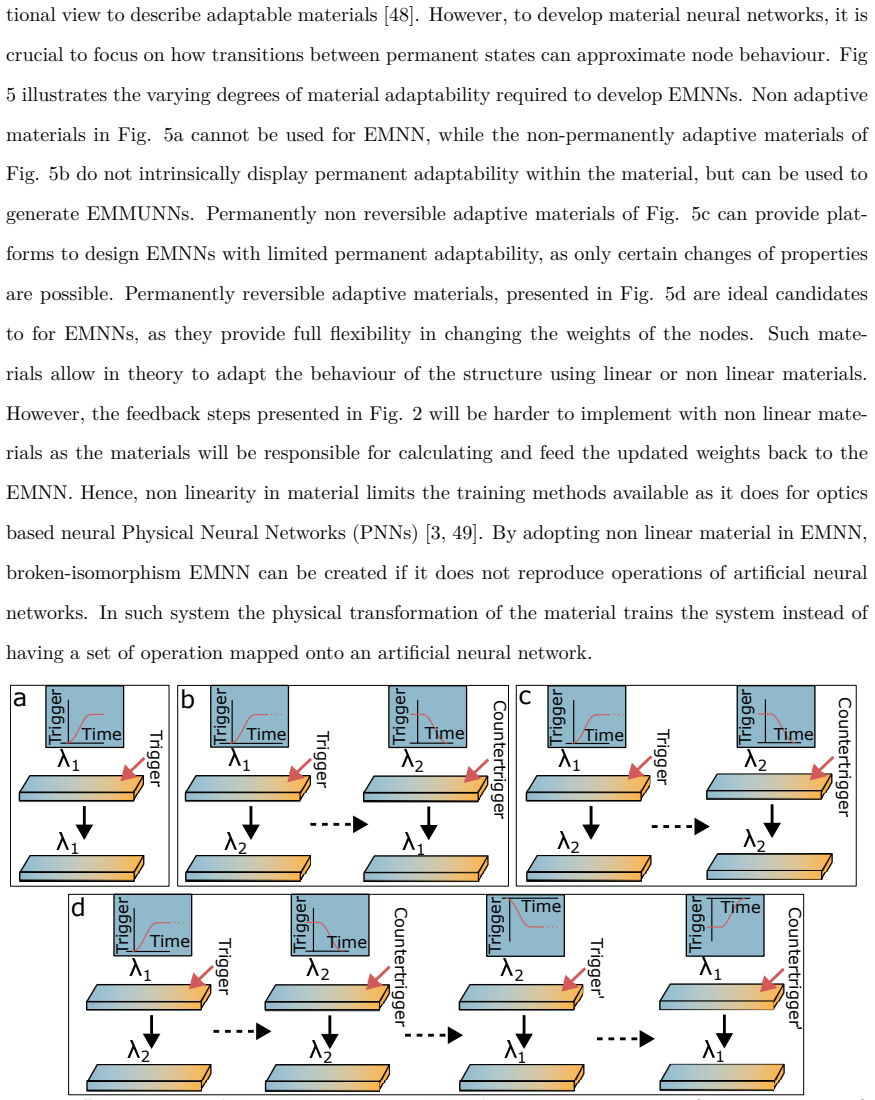
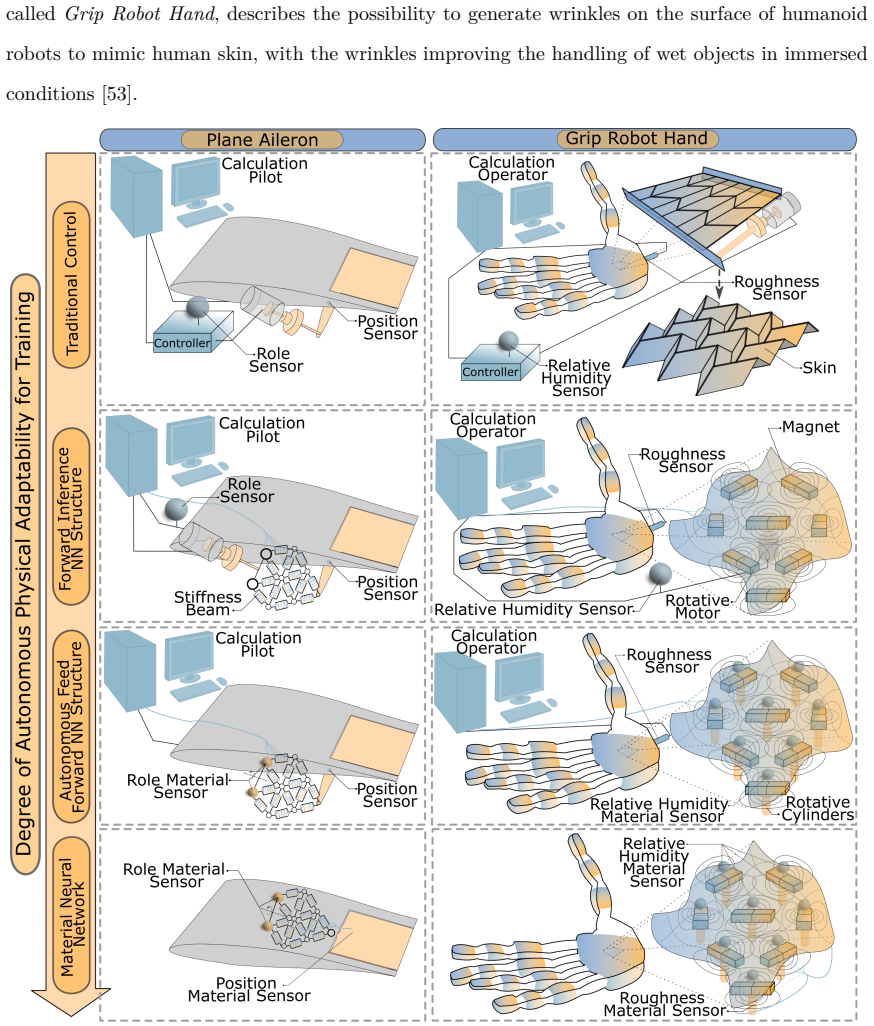
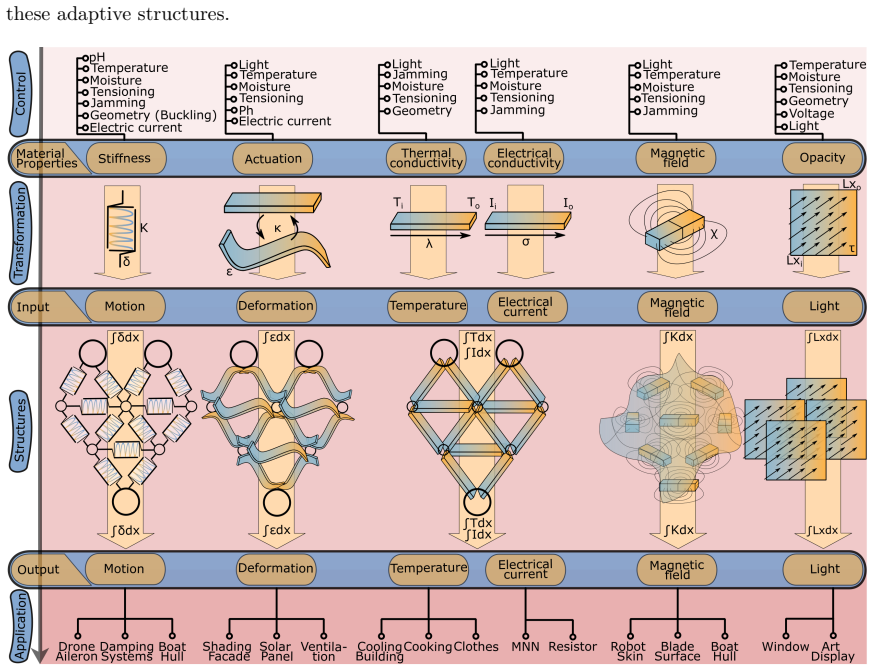
Towards Engineering Material Neural Networks
Pith reviewed 2026-06-27 21:34 UTC · model grok-4.3
The pith
Structural configurations with interconnected adaptable nodes can approximate continuous functions by embedding trainable parameters into load-bearing materials.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
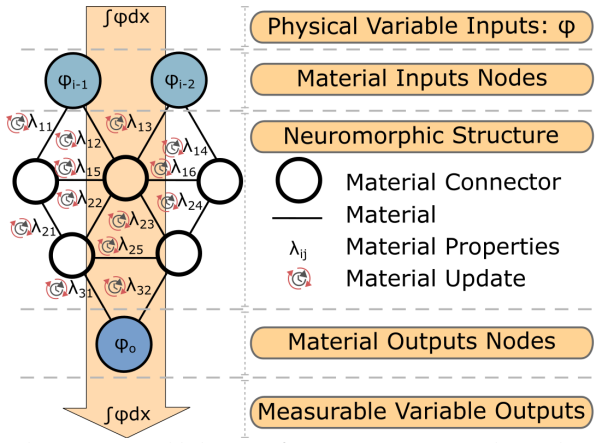
Structural configurations with interconnected adaptable nodes are able to approximate continuous functions, providing new possibilities and opportunities than classical metamaterials and computational materials. Load-bearing engineering materials can therefore be designed with trainable physical parameters and neural network-inspired morphologies, embedding intelligence directly into their structure as Engineering Material Neural Networks (EMNNs).
What carries the argument
Engineering Material Neural Networks (EMNNs): structural configurations with interconnected adaptable nodes whose local mechanical or multifunctional responses act as trainable parameters analogous to neural-network weights while preserving structural integrity.
If this is right
- Adaptive material systems can operate without predefined designs or external electronics-based computing.
- Reversibility, adaptive responses, and learning can be integrated directly into load-bearing structures.
- Composites, architected materials, biological materials, and engineering living materials become candidates for trainable structural intelligence.
- Future work in materials science and structural engineering can focus on developing EMNNs for engineering applications.
Where Pith is reading between the lines
- Such networks could enable structures that adapt their mechanical behavior in response to changing loads without external intervention.
- The approach may extend to problems in self-regulating infrastructure or autonomous robotic systems where computation and structure coincide.
- A minimal test case would be a small lattice of adaptable nodes trained to map input displacements to desired output forces.
Load-bearing premise
Physical, load-bearing materials can be engineered so that their local mechanical or multifunctional responses function as trainable parameters analogous to neural-network weights while preserving structural integrity.
What would settle it
A demonstration that a physical structure of interconnected nodes can be adjusted at the local level to approximate a target continuous function under repeated mechanical loading without loss of load-bearing capacity.
Figures
read the original abstract
Structures that capture functionality in the form of animate or intelligent machines have the potential to transform modern engineering applications. Animation and embedded intelligence are typically realised by integrating advanced capabilities such as reversibility, adaptive responses and learning directly into the materials themselves. Currently, the majority of adaptive material systems rely on predefined adaptive designs combined with in-service, electronics-based computing to dynamically modify the structural behaviour. However, structural configurations with interconnected adaptable nodes are able to approximate continuous functions, providing new possibilities and opportunities than classical metamaterials and computational materials. We discuss here the potential to design load-bearing engineering materials with trainable physical parameters and neural network-inspired morphologies, embedding intelligence directly into their structure, a concept we define as Engineering Material Neural Networks (EMNNs) as a subcategory of Physical Neural Networks. In this perspective, we first establish the foundational concept of EMNNs; we then detail the mechanical and multifunctional properties required for such structural configurations. Finally, we evaluate existing and emerging engineering materials that hold promise for enabling this innovative approach. Key material candidates for realising EMNNs include composites, architected, biological and engineering living materials. We also outline future directions in materials science and structural engineering for developing EMNNs.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript is a perspective article introducing Engineering Material Neural Networks (EMNNs) as a subcategory of Physical Neural Networks. It defines EMNNs as load-bearing structural materials featuring interconnected adaptable nodes with trainable physical parameters and neural-network-inspired morphologies, capable of approximating continuous functions. The text outlines required mechanical and multifunctional properties, evaluates candidate material classes (composites, architected, biological, and living materials), and suggests future directions, while deferring feasibility demonstrations to subsequent work.
Significance. If the proposed analogy between material nodes and neural-network weights can be realized while preserving structural integrity, EMNNs could enable a new class of multifunctional materials that embed adaptive computation directly into load-bearing structures, extending beyond classical metamaterials. The categorization of EMNNs within Physical Neural Networks provides a clear conceptual framing that may help organize future research, though the manuscript itself contains no new derivations, data, or validated mappings.
major comments (1)
- [Abstract] Abstract: the statement that 'structural configurations with interconnected adaptable nodes are able to approximate continuous functions' is presented without citation, derivation, or even a brief sketch of the mapping from physical node responses to neural-network operations; this assertion is load-bearing for the entire proposal yet remains ungrounded within the manuscript.
minor comments (1)
- The sentence 'providing new possibilities and opportunities than classical metamaterials' is grammatically incomplete; rephrase for clarity (e.g., 'beyond those of classical metamaterials').
Simulated Author's Rebuttal
We thank the referee for their thoughtful review and constructive comment on our perspective article. We address the major comment below and will incorporate revisions to strengthen the grounding of the central claim.
read point-by-point responses
-
Referee: [Abstract] Abstract: the statement that 'structural configurations with interconnected adaptable nodes are able to approximate continuous functions' is presented without citation, derivation, or even a brief sketch of the mapping from physical node responses to neural-network operations; this assertion is load-bearing for the entire proposal yet remains ungrounded within the manuscript.
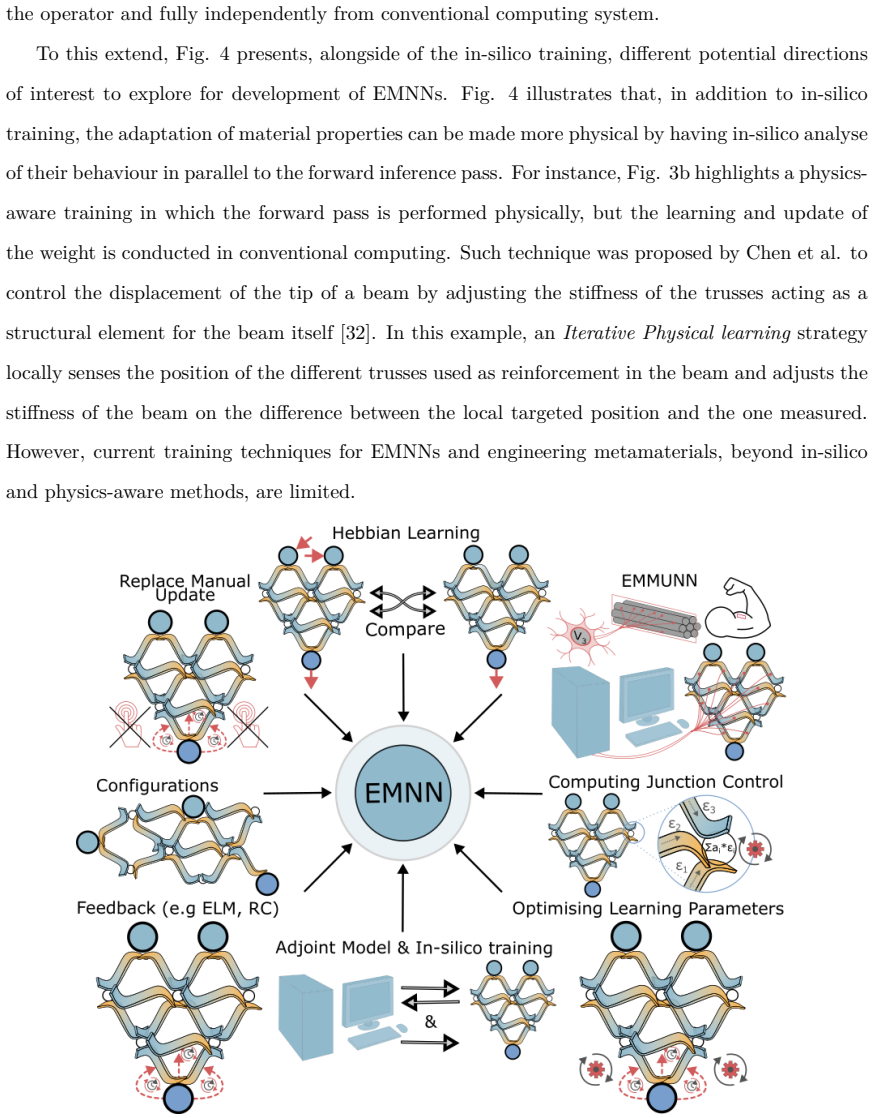
Authors: We agree that the claim requires additional context to be properly grounded. Although the manuscript is a perspective that intentionally defers detailed feasibility studies and derivations to future work, we will revise the abstract and the opening of the introduction to include a concise sketch: interconnected adaptable nodes with trainable physical parameters can emulate the weighted summation and nonlinear activation steps of artificial neurons, thereby inheriting the universal approximation capability of neural networks when the physical responses are suitably mapped to network operations. We will also add citations to foundational works on physical neural networks and neuromorphic materials to support this framing. revision: yes
Circularity Check
No significant circularity; conceptual perspective with no derivations
full rationale
The manuscript is a perspective article that introduces the EMNNs concept by explicit definition as a subcategory of Physical Neural Networks and outlines required material properties plus candidate classes without any equations, proofs, fitted parameters, or predictions. No load-bearing steps reduce results to inputs by construction, self-citation, or ansatz; all claims remain forward-looking and defer feasibility to future work. The text contains no self-referential reductions of the enumerated kinds.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Interconnected adaptable nodes in load-bearing materials can approximate continuous functions in a manner analogous to artificial neural networks.
invented entities (1)
-
Engineering Material Neural Networks (EMNNs)
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Accelerated data-driven materials science with the Materials Project,
M. K. Horton, P. Huck, R. X. Yang, J. M. Munro, S. Dwaraknath, A. M. Ganose, R. S. Kingsbury, M. Wen, J. X. Shen, T. S. Mathis, A. D. Kaplan, K. Berket, J. Riebesell, J. George, A. S. Rosen, E. W. Spotte-Smith, M. J. McDermott, O. A. Cohen, A. Dunn, M. C. Kuner, G. M. Rignanese, G. Petretto, D. Waroquiers, S. M. Griffin, J. B. Neaton, D. C. Chrzan, M. Asta...
2025
-
[2]
Signal Detection By Complex Spatial Filtering,
A. Vander Lugt, “Signal Detection By Complex Spatial Filtering,” IEEE Transactions on Information Theory , vol. 10, no. 2, pp. 139–145, 1964
1964
-
[3]
Training of physical neural networks,
A. Momeni, B. Rahmani, B. Scellier, L. G. Wright, P. L. McMahon, C. C. Wanjura, Y. Li, A. Skalli, N. G. Berloff, T. Onodera, I. Oguz, F. Morichetti, P. del Hougne, M. Le Gallo, A. Sebastian, A. Mirhoseini, C. Zhang, D. Marković, D. Brunner, C. Moser, S. Gigan, F. Mar- quardt, A. Ozcan, J. Grollier, A. J. Liu, D. Psaltis, A. Alù, and R. Fleury, “Training o...
2025
-
[4]
Training all-mechanical neural networks for task learning through in situ backpropagation,
S. Li and X. Mao, “Training all-mechanical neural networks for task learning through in situ backpropagation,” Nat. Commun. , vol. 15, pp. 1–12, 12 2024
2024
-
[5]
Mechanical computing,
H. Yasuda, P. R. Buskohl, A. Gillman, T. D. Murphey, S. Stepney, R. A. Vaia, and J. R. Raney, “Mechanical computing,” Nat., vol. 598, pp. 39–48, 10 2021. 26
2021
-
[6]
Reprogrammable and reconfigurable mechanical computing metastructures with stable and high-density memory,
Y. Li, S. Yu, H. Qing, Y. Hong, Y. Zhao, F. Qi, H. Su, and J. Yin, “Reprogrammable and reconfigurable mechanical computing metastructures with stable and high-density memory,” Sci. Adv. , vol. 10, p. 6476, 6 2024
2024
-
[7]
Mechanical Neural Networks with Explicit and Robust Neurons,
T. Mei, Y. Zhou, and C. Q. Chen, “Mechanical Neural Networks with Explicit and Robust Neurons,” Adv. Sci. , vol. 11, 9 2024
2024
-
[8]
In-memory mechanical computing,
T. Mei and C. Q. Chen, “In-memory mechanical computing,” Nat. Commun., vol. 14, pp. 5204– , 8 2023
2023
-
[9]
A mechanical metamaterial with reprogrammable logical functions,
T. Mei, Z. Meng, K. Zhao, and C. Q. Chen, “A mechanical metamaterial with reprogrammable logical functions,” Nat. Commun. , vol. 12, pp. 1–11, 12 2021
2021
-
[10]
Deep physical neural networks trained with backpropagation,
L. G. Wright, T. Onodera, M. M. Stein, T. Wang, D. T. Schachter, Z. Hu, and P. L. McMahon, “Deep physical neural networks trained with backpropagation,” Nat., vol. 601, pp. 549–555, 1 2022
2022
-
[11]
Advancing neuroengineering with Neuromorphic Twins,
M. Chiappalone and T. Levi, “Advancing neuroengineering with Neuromorphic Twins,” Nat. Commun., vol. 17, pp. 1938–, 2 2026
1938
-
[12]
Neuromorphic metamaterial structures,
J. Sylvestre and J. F. Morissette, “Neuromorphic metamaterial structures,” Mater. Des. , vol. 210, p. 110078, 11 2021
2021
-
[13]
Physical control: A new avenue to achieve intelligence in soft robotics,
E. Milana, C. D. Santina, B. Gorissen, and P. Rothemund, “Physical control: A new avenue to achieve intelligence in soft robotics,” Sci. Robot., vol. 10, p. 7660, 5 2025
2025
-
[14]
AUTOMATON ROVER FOR EXTREME ENVIRONMENTS NASA Inno- vative Advanced Concepts (NIAC) Phase I Final Report Principle Investigator,
J. Sauder, E. Hilgemann, M. Johnson, A. Parness, B. Bienstock, J. H. Additional, J. Kawata, and K. Stack, “AUTOMATON ROVER FOR EXTREME ENVIRONMENTS NASA Inno- vative Advanced Concepts (NIAC) Phase I Final Report Principle Investigator,” tech. rep., 2017
2017
-
[15]
Multilayer feedforward networks are universal approximators,
K. Hornik, M. Stinchcombe, and H. White, “Multilayer feedforward networks are universal approximators,” Neural Netw. , vol. 2, no. 5, pp. 359–366, 1989
1989
-
[16]
Metamaterial robotics,
X. Zheng, Y. Jiang, M. Mete, J. Li, I. Watanabe, T. Yamada, and J. Paik, “Metamaterial robotics,” Sci. Robot., vol. 10, p. 1519, 11 2025
2025
-
[17]
Shape-morphing metamaterials,
K. K. Dudek, M. Kadic, C. Coulais, and K. Bertoldi, “Shape-morphing metamaterials,” Nat. Rev. Mater. , vol. 10, pp. 783–798, 7 2025. 27
2025
-
[18]
A guidance to intelligent metamaterials and metamaterials intelligence,
C. Qian, I. Kaminer, and H. Chen, “A guidance to intelligent metamaterials and metamaterials intelligence,” Nat. Commun. , vol. 16, pp. 1154–, 1 2025
2025
-
[19]
Recent Advances of Auxetic Metamaterials in Smart Materials and Structural Systems,
Y. Zhang, W. Z. Jiang, W. Jiang, X. Y. Zhang, J. Dong, Y. M. Xie, K. E. Evans, and X. Ren, “Recent Advances of Auxetic Metamaterials in Smart Materials and Structural Systems,” Adv. Funct. Mater., vol. 35, 6 2025
2025
-
[20]
Mechanical metamaterials and beyond,
P. Jiao, J. Mueller, J. R. Raney, X. R. Zheng, and A. H. Alavi, “Mechanical metamaterials and beyond,” Nat. Commun. , vol. 14, pp. 6004–, 9 2023
2023
-
[21]
Supervised learning through physical changes in a mechanical system,
M. Stern, C. Arinze, L. Perez, S. E. Palmer, and A. Murugan, “Supervised learning through physical changes in a mechanical system,” PNAS, vol. 117, pp. 14843–14850, 6 2020
2020
-
[22]
Multimodal oscillator networks learn to solve a classification problem,
D. de Bos and M. Serra-Garcia, “Multimodal oscillator networks learn to solve a classification problem,” npj Metamaterials , vol. 2, pp. 3–, 1 2026
2026
-
[23]
Topological mechanical neural networks as classifiers through in situ backpropagation learning,
S. Li and X. Mao, “Topological mechanical neural networks as classifiers through in situ backpropagation learning,” Mech. Syst. Signal Process. , vol. 250, p. 114198, 4 2026
2026
-
[24]
Learning to self-fold at a bifurcation,
C. Arinze, M. Stern, S. R. Nagel, and A. Murugan, “Learning to self-fold at a bifurcation,” Phys. Rev. E , vol. 107, p. 025001, 2 2023
2023
-
[25]
Align, then memorise: the dynamics of learning with feedback alignment*,
M. Refinetti, S. D’Ascoli, R. Ohana, and S. Goldt, “Align, then memorise: the dynamics of learning with feedback alignment*,” J. Phys. A: Math. Theor. , vol. 55, p. 044002, 1 2022
2022
-
[26]
Limits of nonlinear and dispersive fiber propagation for an optical fiber-based extreme learning machine,
A. V. Ermolaev, M. Hary, M. Hary, L. Leybov, P. Ryczkowski, A. Skalli, D. Brunner, G. Genty, J. M. Dudley, and J. M. Dudley, “Limits of nonlinear and dispersive fiber propagation for an optical fiber-based extreme learning machine,” Opt. Lett. , vol. 50, pp. 4166–4169, 7 2025
2025
-
[27]
Recent advances in physical reservoir computing: A review,
G. Tanaka, T. Yamane, J. B. Héroux, R. Nakane, N. Kanazawa, S. Takeda, H. Numata, D. Nakano, and A. Hirose, “Recent advances in physical reservoir computing: A review,” Neural Netw. , vol. 115, pp. 100–123, 7 2019
2019
-
[28]
Principles and metrics of extreme learning machines using a highly nonlinear fiber,
M. Hary, D. Brunner, L. Leybov, P. Ryczkowski, J. M. Dudley, and G. Genty, “Principles and metrics of extreme learning machines using a highly nonlinear fiber,” Nanophotonics, vol. 14, pp. 2733–2748, 8 2025
2025
-
[29]
Multiplexed gradient descent: Fast online training of modern datasets on hardware neural networks without backpropagation,
A. N. McCaughan, B. G. Oripov, N. Ganesh, S. W. Nam, A. Dienstfrey, and S. M. Buckley, “Multiplexed gradient descent: Fast online training of modern datasets on hardware neural networks without backpropagation,” APL mach. learn. , vol. 1, p. 26118, 6 2023. 28
2023
-
[30]
Training Neural Networks with Local Error Signals,
A. Nøkland and L. H. Eidnes, “Training Neural Networks with Local Error Signals,” Proceed- ings of Machine Learning Research , vol. 97, pp. 4839–4850, 5 2019
2019
-
[31]
Self-Learning Machines Based on Hamiltonian Echo Backpropagation,
V. López-Pastor and F. Marquardt, “Self-Learning Machines Based on Hamiltonian Echo Backpropagation,” Phys. Rev. X , vol. 13, p. 031020, 8 2023
2023
-
[32]
Physical learning in reprogrammable metamaterials for adaptation to unknown environments,
K. J. Chen, C. Catrambone, C. Sowinski, J. Mukobi, E. Andreacchio, E. Chew, A. Mor- land, and M. Sakovsky, “Physical learning in reprogrammable metamaterials for adaptation to unknown environments,” arXiv, 10 2025
2025
-
[33]
Mechanical neural networks: Architected materials that learn behaviors,
R. H. Lee, E. A. B. Mulder, and J. B. Hopkins, “Mechanical neural networks: Architected materials that learn behaviors,” Sci. Robot., vol. 7, 10 2022
2022
-
[34]
Using binary-stiffness beams within mechanical neural-network metamaterials to learn,
J. B. Hopkins, R. H. Lee, and P. Sainaghi, “Using binary-stiffness beams within mechanical neural-network metamaterials to learn,” Smart Mater. Struct. , vol. 32, p. 035015, 2 2023
2023
-
[35]
Intelligent mechanical metamaterials towards learning static and dynamic behaviors,
J. Chen, X. Miao, H. Ma, J. B. Hopkins, and G. Huang, “Intelligent mechanical metamaterials towards learning static and dynamic behaviors,” Mater. Des. , vol. 244, p. 113093, 8 2024
2024
-
[36]
Mechanical Neural Network: Making AI Comprehensible for Everyone,
A. Schaffland and J. Schoning, “Mechanical Neural Network: Making AI Comprehensible for Everyone,” 2023 IEEE 2nd German Education Conference, GECon 2023 , 2023
2023
-
[37]
Metamaterials that learn to change shape,
Y. Du, R. van Mastrigt, J. Veenstra, and C. Coulais, “Metamaterials that learn to change shape,” Nat. Phys. , pp. 1–7, 4 2026
2026
-
[38]
Experimental demonstration of coupled learning in elastic networks,
L. E. Altman, M. Stern, A. J. Liu, and D. J. Durian, “Experimental demonstration of coupled learning in elastic networks,” Phys. Rev. Appl. , vol. 22, p. 024053, 8 2024
2024
-
[39]
Controlled Mechanical Anisotropy in 3D-Printed Thermoplastic Elastomeric Composites,
N. A. Patil, W. Wang, J. Lee, D. KadiyalaBhavani, A. Amirkhizi, T. J. Lawton, E. D. Wetzel, and J. H. Park, “Controlled Mechanical Anisotropy in 3D-Printed Thermoplastic Elastomeric Composites,” Macromol. Mater. Eng. , p. e00285, 2025
2025
-
[40]
Desynchronous learning in a physics-driven learning network,
J. F. Wycoff, S. Dillavou, M. Stern, A. J. Liu, and D. J. Durian, “Desynchronous learning in a physics-driven learning network,” J. Chem. Phys. , vol. 156, p. 144903, 4 2022
2022
-
[41]
Supervised Learning in Physical Networks: From Machine Learning to Learning Machines,
M. Stern, D. Hexner, J. W. Rocks, and A. J. Liu, “Supervised Learning in Physical Networks: From Machine Learning to Learning Machines,” Phys. Rev. X , vol. 11, p. 021045, 5 2021
2021
-
[42]
Contrastive Hebbian Learning in the Continuous Hopfield Model,
J. R. Movellan, “Contrastive Hebbian Learning in the Continuous Hopfield Model,” Connec- tionist Models , vol. 1, pp. 10–17, 1 1991. 29
1991
-
[43]
Spatially programmable origami networks enable high- density mechanical computing for autonomous robotics,
X. Hu, T. Tan, Y. Chen, and Z. Yan, “Spatially programmable origami networks enable high- density mechanical computing for autonomous robotics,” Nat. Commun. , vol. 16, pp. 10209–, 11 2025
2025
-
[44]
Motor Unit,
C. Heckman and R. M. Enoka, “Motor Unit,” Compr. Physiol., vol. 2, pp. 2629–2682, 10 2012
2012
-
[45]
Design and fabrication of a three-dimensional meso-sized robotic metamaterial with actively controlled properties,
C. Luo, Y. Song, C. Zhao, S. Thirumalai, I. Ladner, M. A. Cullinan, and J. B. Hopkins, “Design and fabrication of a three-dimensional meso-sized robotic metamaterial with actively controlled properties,” Mater. Horiz. , vol. 7, pp. 229–235, 1 2020
2020
-
[46]
Phase-Changing Metamaterial Capable of Variable Stiffness and Shape Morphing,
R. Poon and J. B. Hopkins, “Phase-Changing Metamaterial Capable of Variable Stiffness and Shape Morphing,” Adv. Eng. Mater. , vol. 21, p. 1900802, 12 2019
2019
-
[47]
Physical neural network; Physics-Aware Back-Propagation; Shading facade; 4D printing; Biocomposites,
C. de Kergariou, D. Correa, A. Perriman, H. Hauser, and F. Scarpa, “Physical neural network; Physics-Aware Back-Propagation; Shading facade; 4D printing; Biocomposites,” Advanced Science (Under Review) , 2026
2026
-
[48]
Viewpoint: From Responsive to Adaptive and Interactive Materials and Mate- rials Systems: A Roadmap,
A. Walther, “Viewpoint: From Responsive to Adaptive and Interactive Materials and Mate- rials Systems: A Roadmap,” Adv. Mater. , vol. 32, 5 2020
2020
-
[49]
Physical deep learning with biologically inspired training method: gradient-free approach for physical hardware,
M. Nakajima, K. Inoue, K. Tanaka, Y. Kuniyoshi, T. Hashimoto, and K. Nakajima, “Physical deep learning with biologically inspired training method: gradient-free approach for physical hardware,” Nat. Commun. , vol. 13, pp. 7847–, 12 2022
2022
-
[50]
New insights into thermal conductivity of uniaxially stretched high density polyethylene films,
R. C. Zhang, Z. Huang, D. Sun, D. Ji, M. Zhong, D. Zang, J. Z. Xu, Y. Wan, and A. Lu, “New insights into thermal conductivity of uniaxially stretched high density polyethylene films,” Polymer, vol. 154, pp. 42–47, 10 2018
2018
-
[51]
Strain-Tunable Thermal Conductivity in Largely Amorphous Polyolefin Fibers via Alignment-Induced Vibra- tional Delocalization,
D. Xu, B. Li, Y. Lyu, V. J. Santamaria-Garcia, Y. Zhu, and S. V. Boriskina, “Strain-Tunable Thermal Conductivity in Largely Amorphous Polyolefin Fibers via Alignment-Induced Vibra- tional Delocalization,” MIT News , 2 2026
2026
-
[52]
Enhanced Electrical Conductivity and Seebeck Coefficient in PEDOT:PSS via a Two-Step Ionic liquid and NaBH4 Treatment for Organic Thermoelectrics,
J. Atoyo, M. R. Burton, J. McGettrick, and M. J. Carnie, “Enhanced Electrical Conductivity and Seebeck Coefficient in PEDOT:PSS via a Two-Step Ionic liquid and NaBH4 Treatment for Organic Thermoelectrics,” Polymers 2020, Vol. 12, , vol. 12, 3 2020
2020
-
[53]
Water-induced finger wrinkles improve handling of wet objects,
K. Kareklas, D. Nettle, and T. V. Smulders, “Water-induced finger wrinkles improve handling of wet objects,” Biol. Lett. , vol. 9, 4 2013. 30
2013
-
[54]
Self-learning mechanical circuits,
V. P. Patil, I. Ho, and M. Prakash, “Self-learning mechanical circuits,” arXiv, 4 2023
2023
-
[55]
A consistent method to design and evaluate the performance of Anti-Roll Tanks for ships,
G. Kapsenberg and N. Carette, “A consistent method to design and evaluate the performance of Anti-Roll Tanks for ships,” Sh. Technol. Res. , vol. 70, pp. 117–145, 5 2023
2023
-
[56]
Rotary 4D Printing of Programmable Metamaterials on Sustainable 4D Mandrel,
H. Soleimanzadeh, M. Bodaghi, M. Jamalabadi, B. Rolfe, and A. Zolfagharian, “Rotary 4D Printing of Programmable Metamaterials on Sustainable 4D Mandrel,” Adv. Mater. Technol., 9 2025
2025
-
[57]
Effect of pH and salt on the stiffness of polyelectrolyte multilayer microcapsules,
V. V. Lulevich and O. I. Vinogradova, “Effect of pH and salt on the stiffness of polyelectrolyte multilayer microcapsules,” Langmuir, vol. 20, pp. 2874–2878, 3 2004
2004
-
[58]
Reprogrammable Dual-Regulated Pollen Actuators for Geometric Encoding,
J. Deng, Z. Zhao, A. Ahmad, J. Li, Y. H. Choe, Y. C. Lin, S. I. Mohammed, C. Zhou, and N. J. Cho, “Reprogrammable Dual-Regulated Pollen Actuators for Geometric Encoding,” Adv. Mater., vol. 38, p. e15030, 2 2025
2025
-
[59]
High stiffness polymer composite with tunable transparency,
P. S. Owuor, V. Chaudhary, C. F. Woellner, V. Sharma, R. V. Ramanujan, A. S. Stender, M. Soto, S. Ozden, E. V. Barrera, R. Vajtai, D. S. Galvão, J. Lou, C. S. Tiwary, and P. M. Ajayan, “High stiffness polymer composite with tunable transparency,” Mater. Today, vol. 21, pp. 475–482, 6 2018
2018
-
[60]
The influence of the humidity on the mechanical properties of 3D printed continuous flax fibre reinforced poly(lactic acid) composites,
C. de Kergariou, H. Saidani-Scott, A. Perriman, F. Scarpa, and A. Le Duigou, “The influence of the humidity on the mechanical properties of 3D printed continuous flax fibre reinforced poly(lactic acid) composites,” Compos. Part A Appl. Sci. Manuf. , vol. 155, pp. 1–12, 4 2022
2022
-
[61]
Damage in biocomposites: Stiffness evolution of aligned plant fibre composites during monotonic and cyclic fatigue loading,
D. U. Shah, “Damage in biocomposites: Stiffness evolution of aligned plant fibre composites during monotonic and cyclic fatigue loading,” Comp. Part A: Appl. Sci. Manuf. , vol. 83, pp. 160–168, 4 2016
2016
-
[62]
Mechanical properties of spider dragline silk: Humidity, hysteresis, and relaxation,
T. Vehoff, A. Glišović, H. Schollmeyer, A. Zippelius, and T. Salditt, “Mechanical properties of spider dragline silk: Humidity, hysteresis, and relaxation,” Biophys. J., vol. 93, pp. 4425–4432, 12 2007
2007
-
[63]
Shear modulus and dilatancy softening in granular packings above jamming,
C. Coulais, A. Seguin, and O. Dauchot, “Shear modulus and dilatancy softening in granular packings above jamming,” Phys. Rev. Lett. , vol. 113, p. 198001, 11 2014
2014
-
[64]
Rate dependence in granular matter with application to tunable metamaterials,
M. Liu, W. Mao, Y. Zhao, Q. Xu, Y. Gan, Y. Wang, and K. J. Hsia, “Rate dependence in granular matter with application to tunable metamaterials,” Matter, vol. 98, p. 102562, 12 2025. 31
2025
-
[65]
Vibration characteristics of electrorheological elastomer sandwich beams,
K. Wei, Q. Bai, G. Meng, and L. Ye, “Vibration characteristics of electrorheological elastomer sandwich beams,” Smart Mater. Struct. , vol. 20, p. 055012, 4 2011
2011
-
[66]
Bio-inspired mechanically adaptive materials through vibration-induced crosslinking,
Z. Wang, J. Wang, J. Ayarza, T. Steeves, Z. Hu, S. Manna, and A. P. Esser‐Kahn, “Bio-inspired mechanically adaptive materials through vibration-induced crosslinking,” Nat. Mater., vol. 20, pp. 869–874, 2 2021
2021
-
[67]
Ultra-programmable buckling- driven soft cellular mechanisms,
S. Janbaz, F. S. Bobbert, M. J. Mirzaali, and A. A. Zadpoor, “Ultra-programmable buckling- driven soft cellular mechanisms,” Mater. Horiz. , vol. 6, pp. 1138–1147, 7 2019
2019
-
[68]
Monolithic binary stiffness building blocks for mechanical digital machines,
P. R. Kuppens, M. A. Bessa, J. L. Herder, and J. B. Hopkins, “Monolithic binary stiffness building blocks for mechanical digital machines,” Extreme Mech. Lett. , vol. 42, p. 101120, 1 2021
2021
-
[69]
Self-deployable contracting-cord metamaterials with tunable mechanical properties,
W. Yan, T. Jones, C. L. Jawetz, R. H. Lee, J. B. Hopkins, and A. Mehta, “Self-deployable contracting-cord metamaterials with tunable mechanical properties,” Mater. Horiz. , vol. 11, pp. 3805–3818, 8 2024
2024
-
[70]
Light-, pH- and thermal-responsive hydrogels with the triple-shape memory effect,
Y. Y. Xiao, X. L. Gong, Y. Kang, Z. C. Jiang, S. Zhang, and B. J. Li, “Light-, pH- and thermal-responsive hydrogels with the triple-shape memory effect,” Chem. Commun. , vol. 52, pp. 10609–10612, 8 2016
2016
-
[71]
Hybrid 4D printing of flexible multi- functional composites by multi jet fusion and direct ink writing,
M. Chen, R. An, F. Demoly, H. J. Qi, and K. Zhou, “Hybrid 4D printing of flexible multi- functional composites by multi jet fusion and direct ink writing,” Mater. Sci. Eng. R: Rep. , vol. 163, p. 100890, 4 2025
2025
-
[72]
Design of 3D and 4D printed continuous fibre composites via an evolutionary algorithm and voxel- based Finite Elements: Application to natural fibre hygromorphs,
C. de Kergariou, B. C. Kim, A. Perriman, A. Le Duigou, S. Guessasma, and F. Scarpa, “Design of 3D and 4D printed continuous fibre composites via an evolutionary algorithm and voxel- based Finite Elements: Application to natural fibre hygromorphs,” Addit. Manuf. , vol. 59, p. 103144, 11 2022
2022
-
[73]
Development of an electro- thermo-mechanical 4D printed multi-shape smart actuator: Experiments and simulation,
R. Delbart, C. Robert, T. Q. T. Hoang, and F. Martinez-Hergueta, “Development of an electro- thermo-mechanical 4D printed multi-shape smart actuator: Experiments and simulation,” Compos. - A: Appl. Sci. Manuf. , p. 108381, 7 2024
2024
-
[74]
Hy- gromnemics: Programmable Material Memory Matter Actuators via Wet Pre‐Constraining,
C. de Kergariou, F. S. G. Smith, R. S. Trask, A. W. Perriman, F. Scarpa, and D. Correa, “Hy- gromnemics: Programmable Material Memory Matter Actuators via Wet Pre‐Constraining,” Adv. Mater. Technol. , 8 2025. 32
2025
-
[75]
On the Influence of Humidity on a Thermal Conductivity Sensor for the Detection of Hydrogen,
S. Emperhoff, M. Eberl, T. Dwertmann, and J. Wöllenstein, “On the Influence of Humidity on a Thermal Conductivity Sensor for the Detection of Hydrogen,” Sensors, vol. 24, 4 2024
2024
-
[76]
Strain effects on the thermal conductivity of nanostructures,
X. Li, K. Maute, M. L. Dunn, and R. Yang, “Strain effects on the thermal conductivity of nanostructures,” Phys. Rev. B , vol. 81, p. 245318, 6 2010
2010
-
[77]
Light-triggered thermal conductivity switching in azobenzene polymers,
J. Shin, J. Sung, M. Kang, X. Xie, B. Lee, K. M. Lee, T. J. White, C. Leal, N. R. Sottos, P. V. Braun, and D. G. Cahill, “Light-triggered thermal conductivity switching in azobenzene polymers,” Proceedings of the National Academy of Sciences of the United States of America , vol. 116, pp. 5973–5978, 3 2019
2019
-
[78]
Orientation behavior and thermal conductivity of liquid crystal polymer composites based on Three-Dimensional printing,
F. Luo, S. Yang, P. Yan, H. Li, B. Huang, Q. Qian, and Q. Chen, “Orientation behavior and thermal conductivity of liquid crystal polymer composites based on Three-Dimensional printing,” Compos. - A: Appl. Sci. Manuf. , vol. 160, p. 107059, 9 2022
2022
-
[79]
Segregated and Non-Settling Liquid Metal Elastomer via Jamming of Elastomeric Particles,
X. Xue, D. Zhang, Y. Wu, R. Xing, H. Li, T. Yu, B. Bai, Y. Tao, M. D. Dickey, and J. Yang, “Segregated and Non-Settling Liquid Metal Elastomer via Jamming of Elastomeric Particles,” Adv. Funct. Mater. , vol. 33, p. 2210553, 2 2023
2023
-
[80]
Effect of visible light on the elec- trical conductivity of conductive grade PEDOT:PSS,
S. Yigzaw, N. Bekri, A. Gedifew, S. Alayau, and A. Benor, “Effect of visible light on the elec- trical conductivity of conductive grade PEDOT:PSS,” Mater. Res. Express, vol. 12, p. 086302, 8 2025
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.