Quantifying Uncertainty in Space Debris Capture with Active Tether-Net Systems Caused by Noisy Observations
Pith reviewed 2026-06-29 15:12 UTC · model grok-4.3
The pith
Noisy observations of debris state propagate to measurable uncertainty in tether-net capture quality, quantified for both fixed and neuro-control policies.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
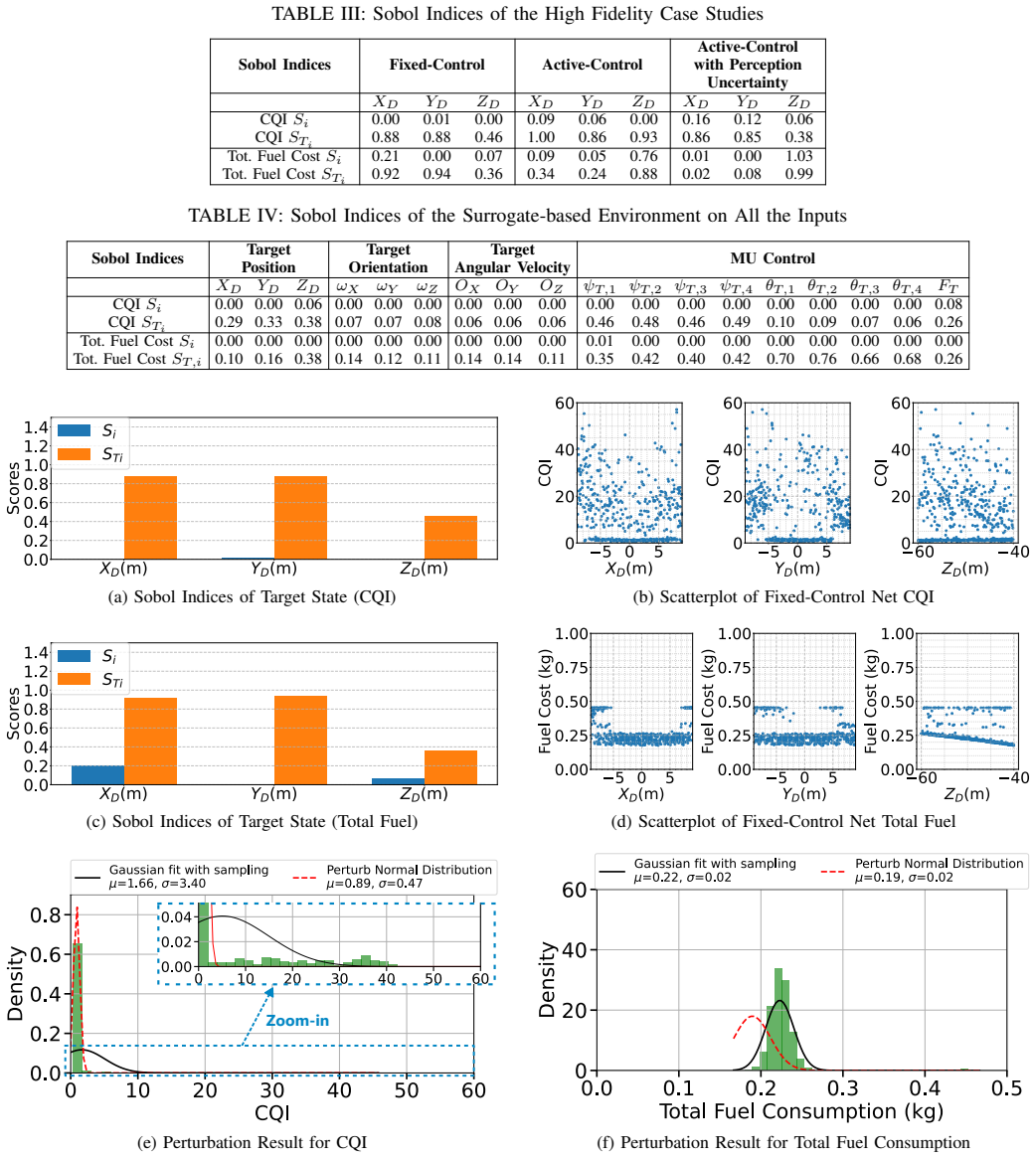
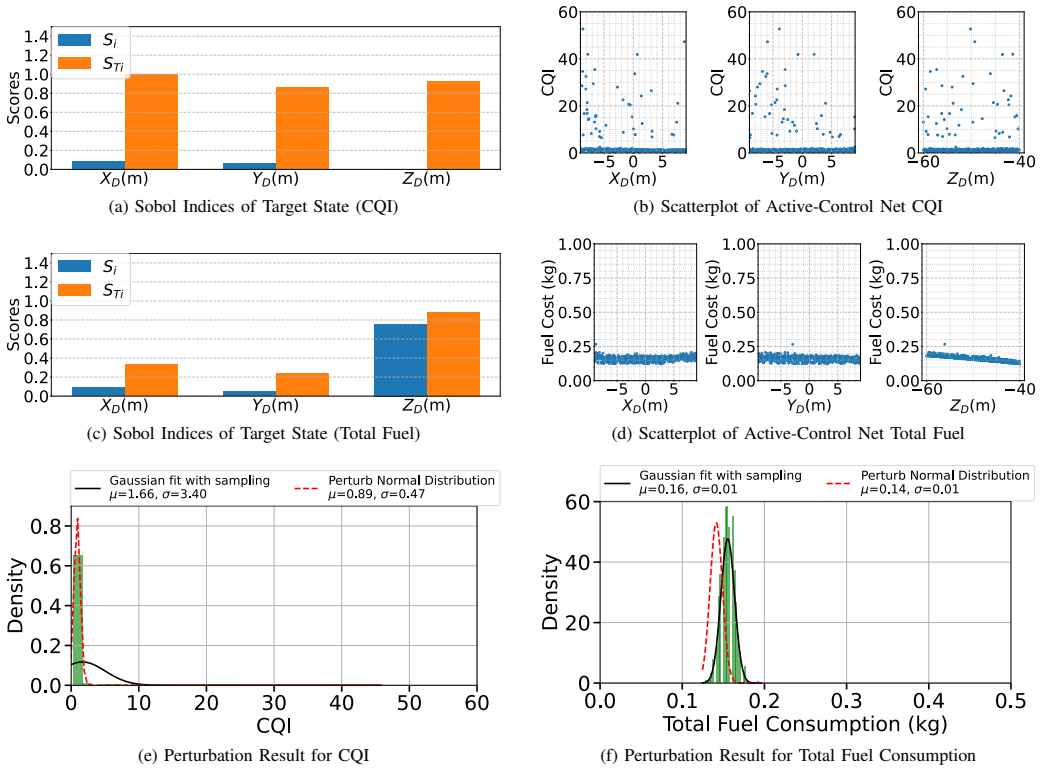
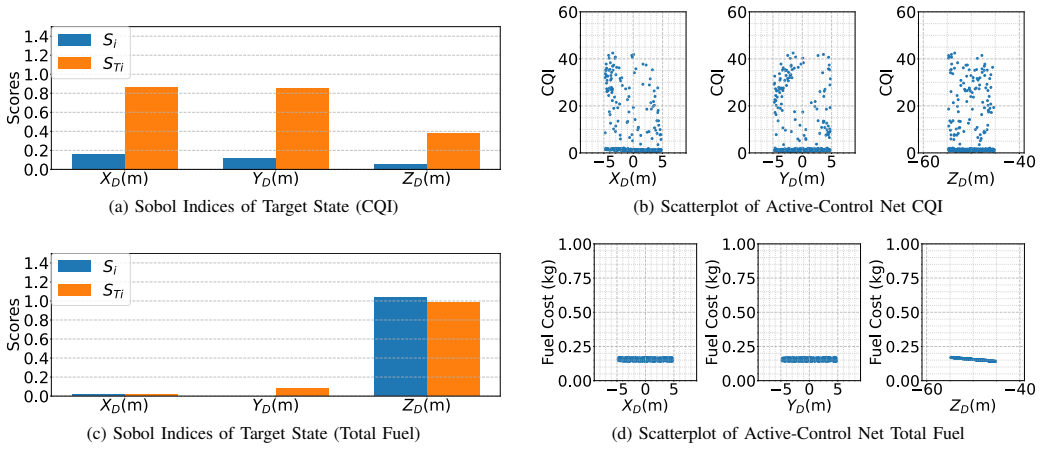
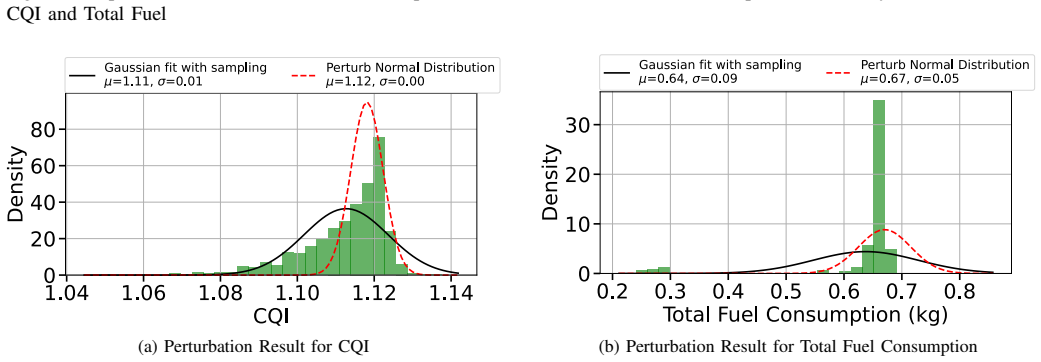
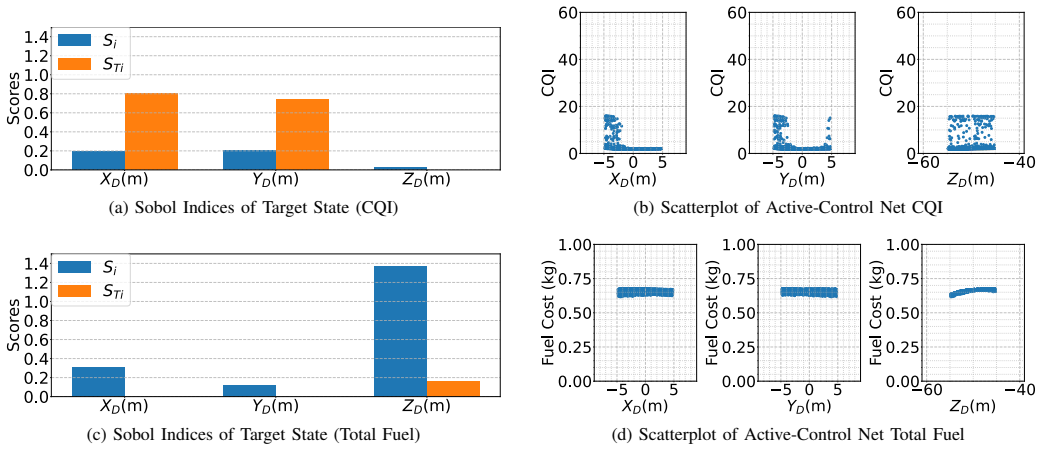
The paper claims that a pipeline based on Sobol's variance-based sensitivity analysis and perturbation-based methods can propagate noisy observations of the target debris state to quantify resulting uncertainty in the Capture Quality Index, and that this quantification applies to both a fixed baseline control and a trained neuro-control policy within high-fidelity and surrogate simulation environments.
What carries the argument
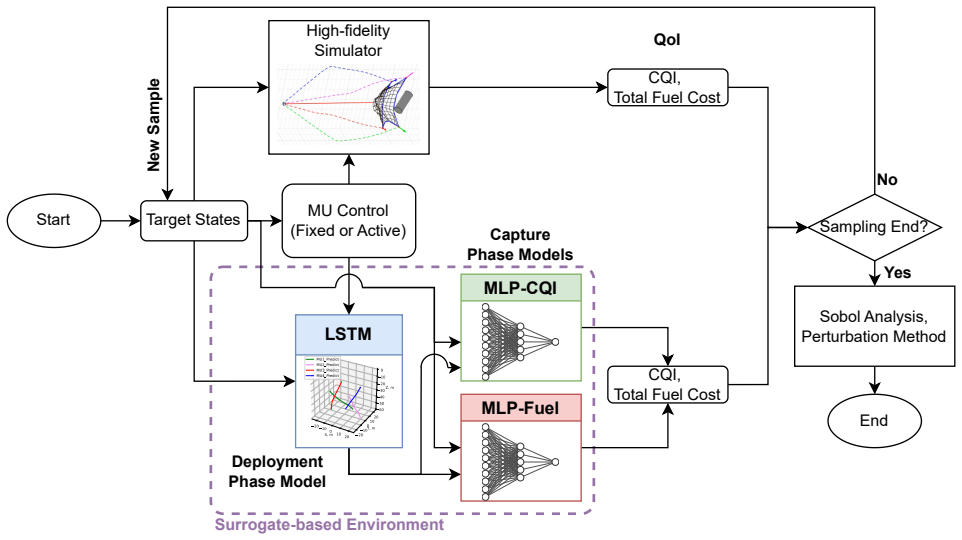
Uncertainty propagation pipeline that maps noisy debris state observations to variations in Capture Quality Index using Sobol variance-based sensitivity analysis and perturbation methods, applied separately to fixed baseline control and neuro-control policy.
If this is right
- Uncertainty bounds on Capture Quality Index can be computed for the fixed baseline control under noisy observations.
- Uncertainty bounds on Capture Quality Index can be computed for the neuro-control policy under noisy observations.
- Trade-offs appear between prediction accuracy and ease of uncertainty resolution when switching from high-fidelity simulator to surrogate environment.
- Which components of observation noise most influence capture quality can be identified through the sensitivity analysis.
Where Pith is reading between the lines
- Minimum sensor precision requirements for acceptable capture reliability could be read off from the resulting sensitivity rankings.
- A neuro-control policy trained under one noise model may lose performance guarantees if real sensor statistics differ, suggesting a need for noise-robust training.
- The same propagation pipeline could later incorporate modeling errors in net dynamics to give a combined uncertainty estimate.
Load-bearing premise
The statistical model of observation noise is treated as known and unaffected by which control policy is used.
What would settle it
A physical tether-net capture test in which measured variation in actual capture outcomes falls outside the uncertainty ranges predicted by the pipeline for the assumed noise model.
Figures

read the original abstract
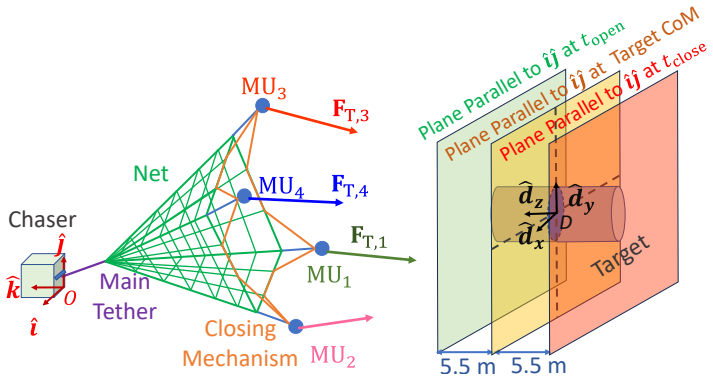
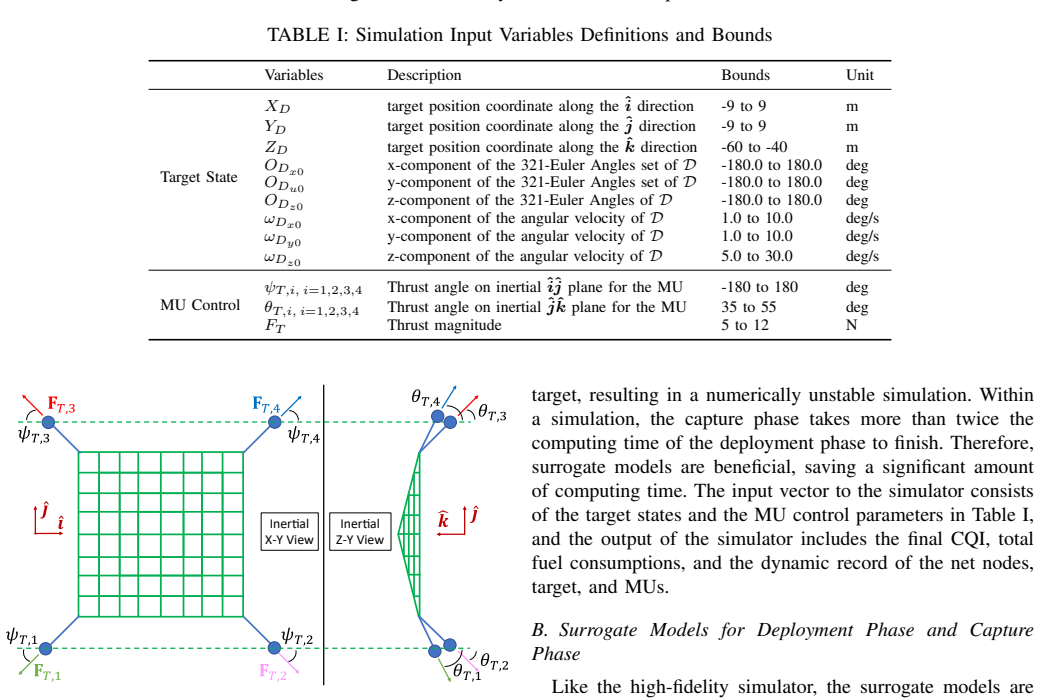
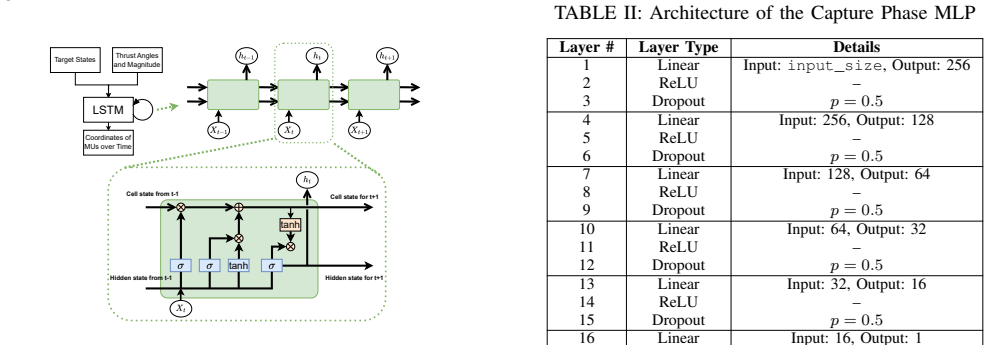
As Low Earth Orbit has grown more crowded with space debris, the need for reliable and efficient debris removal solutions becomes more urgent. An active tether-net system with maneuverable units is one of the promising solutions to this problem, whose success is dependent on the robustness of the net maneuver and closing decisions. These in turn are impacted by the uncertainties attributed to i) noisy observation of the target debris state (e.g., sensing errors), and ii) imperfect simulations of the complex net dynamics and net/debris interaction behavior, over which the decision system is trained. This paper focuses on the first of these two uncertainty sources, and presents a pipeline to propagate and quantify the resulting uncertainty in the debris capture performance expressed in terms of Capture Quality Index (CQI). This quantification is uniquely performed for both an active tether-net using a fixed baseline control and one using a trained neuro-control policy to guide the net maneuver during the deployment phase. Two different uncertainty quantification (UQ) techniques, namely Sobol's variance-based sensitivity analysis and perturbation-based method are exploited. A high-fidelity simulator and a lower-fidelity surrogate-based environment are used to demonstrate trade-offs between prediction accuracy versus ease of resolving uncertainties.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a pipeline to propagate and quantify uncertainty in Capture Quality Index (CQI) for active tether-net space debris capture systems arising from noisy observations of the target debris state. The quantification is performed for both a fixed baseline controller and a trained neuro-control policy, employing Sobol's variance-based sensitivity analysis and perturbation-based UQ methods. Trade-offs are illustrated using a high-fidelity simulator and a lower-fidelity surrogate environment.
Significance. If the pipeline were accompanied by concrete numerical results, validation, and error bars, the work could provide a useful framework for assessing robustness of debris removal systems to sensor noise, particularly by contrasting classical and learned controllers. The dual-simulator approach and explicit focus on observation uncertainty address a practical concern in on-orbit servicing. However, the current description centers on the existence of the pipeline without reported outcomes, limiting the assessed contribution.
major comments (2)
- [Abstract] Abstract: the description outlines standard UQ methods and two simulators but supplies no numerical results, validation against ground truth, or error-bar reporting. The central claim is therefore the existence of the pipeline rather than any quantified finding on CQI uncertainty, preventing evaluation of whether the reported bounds are meaningful.
- [Abstract] Abstract (paragraph on uncertainty sources): the noise model is treated as a known input independent of the control policy. No verification is described that the neuro-policy was trained under a noise distribution consistent with the propagation model; mismatch would render the CQI uncertainty intervals non-transferable.
Simulated Author's Rebuttal
We thank the referee for the detailed review and constructive suggestions. The manuscript presents both the UQ pipeline and its application to obtain concrete sensitivity indices and CQI uncertainty bounds on the two controllers; we will revise the abstract to foreground these numerical outcomes and add explicit statements on training conditions.
read point-by-point responses
-
Referee: [Abstract] Abstract: the description outlines standard UQ methods and two simulators but supplies no numerical results, validation against ground truth, or error-bar reporting. The central claim is therefore the existence of the pipeline rather than any quantified finding on CQI uncertainty, preventing evaluation of whether the reported bounds are meaningful.
Authors: The full manuscript reports Sobol indices, perturbation-derived uncertainty intervals, and trade-off comparisons between the high- and low-fidelity simulators for both the fixed and neuro-controlled cases. We will revise the abstract to include representative numerical values (e.g., first-order Sobol indices for key states and resulting CQI variance ranges) together with a brief statement on the validation performed via the dual-simulator setup. revision: yes
-
Referee: [Abstract] Abstract (paragraph on uncertainty sources): the noise model is treated as a known input independent of the control policy. No verification is described that the neuro-policy was trained under a noise distribution consistent with the propagation model; mismatch would render the CQI uncertainty intervals non-transferable.
Authors: The neuro-policy was trained under noise-free observations in the surrogate environment; the subsequent UQ step then propagates the sensor-noise distribution through the closed-loop system. We will add an explicit statement in the methods section clarifying this training regime and will discuss the resulting transferability assumption as a modeling choice, noting that the reported intervals therefore quantify robustness to post-training observation noise. revision: yes
Circularity Check
No circularity: UQ pipeline treats simulators and noise model as external inputs
full rationale
The paper describes a pipeline that applies Sobol variance-based sensitivity analysis and perturbation methods to propagate assumed observation noise into Capture Quality Index uncertainty bounds, separately for a fixed baseline controller and a pre-trained neuro-policy. No equations, fitted parameters, or self-citations are presented that would make the output CQI distributions equivalent by construction to the input noise statistics or to data used in policy training. The high-fidelity simulator and surrogate environment are invoked as independent oracles, and the noise model is stated as a known input rather than derived from the same observations or policy training runs. The derivation therefore remains self-contained against external benchmarks with no load-bearing reductions of the claimed results to the paper's own fitted quantities or prior self-work.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Sensor noise on debris state is statistically independent of the control policy and follows a distribution that can be sampled for propagation.
Reference graph
Works this paper leans on
-
[1]
Cost and benefit analysis of orbital debris remediation,
T. J. Colvin, J. Karcz, and G. Wusk, “Cost and benefit analysis of orbital debris remediation,” 2023
2023
-
[2]
Space debris removal by ground- based lasers: main conclusions of the european project cleanspace,
B. Esmiller, C. Jacquelard, H.-A. Eckel, and E. Wnuk, “Space debris removal by ground- based lasers: main conclusions of the european project cleanspace,”Applied Optics, vol. 53, no. 31, pp. I45–I54, 2014
2014
-
[3]
Robustness and safety of net-based debris capture under deployment and environmental uncertainties,
A. Boonrath and E. M. Botta, “Robustness and safety of net-based debris capture under deployment and environmental uncertainties,”Journal of Spacecraft and Rockets, pp. 1–17, 2025
2025
-
[4]
Review and comparison of active space debris capturing and removal methods,
M. Shan, J. Guo, and E. Gill, “Review and comparison of active space debris capturing and removal methods,”Progress in Aerospace Sciences, vol. 80, pp. 18–32, 2016
2016
-
[5]
Validation results of satellite mock-up capturing experiment using nets,
A. Medina, L. Cerc ´os, R. M. Stefanescu, R. Benvenuto, V . Pesce, M. Marcon, M. Lavagna, I. Gonz ´alez, N. R. L ´opez, and K. Wormnes, “Validation results of satellite mock-up capturing experiment using nets,” Acta Astronautica, vol. 134, pp. 314–332, 2017
2017
-
[6]
Dynamics analysis and GNC design of flexible systems for space debris active removal,
R. Benvenuto, S. Salvi, and M. Lavagna, “Dynamics analysis and GNC design of flexible systems for space debris active removal,”Acta Astronautica, vol. 110, pp. 247–265, 2015
2015
-
[7]
Contact dynamic models of space debris capturing using a net,
M. Shan, J. Guo, and E. Gill, “Contact dynamic models of space debris capturing using a net,”Acta Astronautica, vol. 158, pp. 198–205, 2019
2019
-
[8]
Dynamics modeling and simulation of self-collision of tether-net for space debris removal,
J. Si, Z. Pang, Z. Du, and C. Cheng, “Dynamics modeling and simulation of self-collision of tether-net for space debris removal,”Advances in Space Research, vol. 64, pp. 1675–1687, 2019
2019
-
[9]
On the Simu- lation of Tether-Nets for Space debris Capture with V ortex Dynamics,
E. M. Botta, I. Sharf, A. K. Misra, and M. Teichmann, “On the Simu- lation of Tether-Nets for Space debris Capture with V ortex Dynamics,” Acta Astronautica, vol. 123, pp. 91–102, 2016
2016
-
[10]
Energy and momentum analysis of the deployment dynamics of nets in space,
E. M. Botta, I. Sharf, and A. K. Misra, “Energy and momentum analysis of the deployment dynamics of nets in space,”Acta Astronautica, vol. 140, pp. 554–564, 2017
2017
-
[11]
Simulation of tether-nets for capture of space debris and small asteroids,
——, “Simulation of tether-nets for capture of space debris and small asteroids,”Acta Astronautica, vol. 155, pp. 448–461, 2019
2019
-
[12]
Study on acceptable offsets of ejected nets from debris center for successful capture of debris,
Y . Endo, H. Kojima, and P. M. Trivailo, “Study on acceptable offsets of ejected nets from debris center for successful capture of debris,” Advances in Space Research, vol. 66, no. 2, pp. 450–461, 2020
2020
-
[13]
New formulation for evaluating status of space debris capture using tether-net,
——, “New formulation for evaluating status of space debris capture using tether-net,”Advances in Space Research, vol. 70, no. 10, pp. 2976– 3002, 2022
2022
-
[14]
Design, development, and experiments of novel tether- net release mechanism,
H. Kojima, S. Keshtkar, F. Baba, Y . Kato, H. Suzuki, K. Kosuge, and P. M. Trivailo, “Design, development, and experiments of novel tether- net release mechanism,”Advances in Space Research, vol. 71, no. 8, pp. 3203–3221, 2023
2023
-
[15]
Dynamic computation of a tether-net system capturing a space target via discrete elastic rods and an energy-conserving integrator,
Y . Hou, C. Liu, H. Hu, W. Yang, and J. Shi, “Dynamic computation of a tether-net system capturing a space target via discrete elastic rods and an energy-conserving integrator,”Acta Astronautica, vol. 186, pp. 118–134, 2021
2021
-
[16]
Nonlinear dynamic modeling of a tether-net system for space debris capture,
W. Huang, D. He, Y . Li, D. Zhang, H. Zou, H. Liu, W. Yang, L. Qin, and Q. Fei, “Nonlinear dynamic modeling of a tether-net system for space debris capture,”Nonlinear Dynamics, vol. 110, no. 3, pp. 2297–2315, 2022
2022
-
[17]
Contact dynamic analysis of tether-net system for space debris capture using incremental potential formulation,
W. Huang, H. Zou, H. Liu, W. Yang, J. Gao, and Z. Liu, “Contact dynamic analysis of tether-net system for space debris capture using incremental potential formulation,”Advances in Space Research, 2023
2023
-
[18]
Approach modeling and control of an autonomous maneuverable space net,
Z. Meng, P. Huang, and J. Guo, “Approach modeling and control of an autonomous maneuverable space net,”IEEE Transactions on Aerospace and Electronic Systems, vol. 53, no. 6, pp. 2651–2661, 2017
2017
-
[19]
Impact dynamic modeling and adaptive target capturing control for tethered space robots with uncertainties,
P. Huang, D. Wang, Z. Meng, F. Zhang, and Z. Liu, “Impact dynamic modeling and adaptive target capturing control for tethered space robots with uncertainties,”IEEE/ASME Transactions on Mechatronics, vol. 21, no. 5, pp. 2260–2271, 2016
2016
-
[20]
Impulsive super-twisting sliding mode control for space debris capturing via tethered space net robot,
Y . Zhao, F. Zhang, P. Huang, and X. Liu, “Impulsive super-twisting sliding mode control for space debris capturing via tethered space net robot,”IEEE transactions on industrial electronics (1982), vol. 67, no. 8, pp. 6874–6882, 2020
1982
-
[21]
Learning-aided control of robotic tether-net with maneuverable nodes to capture large space debris,
A. Boonrath, F. Liu, E. M. Botta, and S. Chowdhury, “Learning-aided control of robotic tether-net with maneuverable nodes to capture large space debris,”IEEE 2024 International Conference on Robotics and Automation, 2024
2024
-
[22]
Multi-debris capture by tethered space net robot via redeployment and assembly,
W. Zhu, Z. Pang, Z. Du, G. Gao, and Z. H. Zhu, “Multi-debris capture by tethered space net robot via redeployment and assembly,”Journal of Guidance, Control, and Dynamics, pp. 1–18, 2024
2024
-
[23]
Concurrent design optimization of tether-net system and actions for reliable space-debris capture,
C. Zeng, G. R. Hecht, S. Chowdhury, and E. M. Botta, “Concurrent design optimization of tether-net system and actions for reliable space-debris capture,”Journal of Spacecraft and Rockets, vol. 0, no. 0, pp. 1–11, 0. [Online]. Available: https://doi.org/10.2514/1.A35812
-
[24]
Learning robust policies for generalized debris capture with an automated tether-net system,
C. Zeng, G. R. Hecht, P. K. Kumar, R. K. Shah, E. M. Botta, and S. Chowdhury, “Learning robust policies for generalized debris capture with an automated tether-net system,” inAIAA SCITECH 2022 Forum. American Institute of Aeronautics and Astronautics, jan 2022. [Online]. Available: https://doi.org/10.2514%2F6.2022-2379
2022
-
[25]
Learning constrained corner node trajectories of a tether net system for space debris capture,
F. Liu, A. Boonrath, P. KrisshnaKumar, E. M. Botta, and S. Chowdhury, “Learning constrained corner node trajectories of a tether net system for space debris capture,” inAIAA AVIATION 2023 Forum, 2023, p. 3920
2023
-
[27]
R. C. Smith,Uncertainty quantification : theory, implementation, and applications, ser. Computational science & engineering. Philadelphia: Society for Industrial and Applied Mathematics, 2014 - 2014
2014
-
[28]
Conditional first- order second-moment method and its application to the quantification of uncertainty in groundwater modeling,
H. Kunstmann, W. Kinzelbach, and T. Siegfried, “Conditional first- order second-moment method and its application to the quantification of uncertainty in groundwater modeling,”Water resources research, vol. 38, no. 4, pp. 6–1–6–14, 2002
2002
-
[29]
Output space mapping for net-based debris capture,
N. Ravichandra and E. M. Botta, “Output space mapping for net-based debris capture,” inAIAA Scitech 2020 Forum, 2020, p. 0717
2020
-
[30]
A quality index for net-based capture of space debris,
C. M. Barnes and E. M. Botta, “A quality index for net-based capture of space debris,”Acta Astronautica, vol. 176, pp. 455–463, 2020. [Online]. Available: https://www.sciencedirect.com/science/article/pii/ S0094576520304100 [31]2 LBF COLD GAS THRUSTER, V ACCO INDUSTRIES, INC, 2004, a Subsidiary of ESCO Technologies, Inc. [Online]. Available: https://www.v...
2020
-
[31]
JAX: composable transformations of Python+NumPy programs,
J. Bradbury, R. Frostig, P. Hawkins, M. J. Johnson, C. Leary, D. Maclaurin, G. Necula, A. Paszke, J. VanderPlas, S. Wanderman-Milne, and Q. Zhang, “JAX: composable transformations of Python+NumPy programs,” 2018. [Online]. Available: http://github.com/google/jax
2018
-
[32]
On neural differential equations,
P. Kidger, “On neural differential equations,” Ph.D. dissertation, Univer- sity of Oxford, 2021
2021
-
[33]
Proximal Policy Optimization Algorithms
J. Schulman, F. Wolski, P. Dhariwal, A. Radford, and O. Klimov, “Proximal policy optimization algorithms,” 2017. [Online]. Available: https://arxiv.org/abs/1707.06347 12
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[34]
Making best use of model evaluations to compute sensitivity indices,
A. Saltelli, “Making best use of model evaluations to compute sensitivity indices,”Computer physics communications, vol. 145, no. 2, pp. 280– 297, 2002
2002
-
[35]
Global sensitivity indices for nonlinear mathematical models and their monte carlo estimates,
I. Sobol, “Global sensitivity indices for nonlinear mathematical models and their monte carlo estimates,”Mathematics and computers in simu- lation, vol. 55, no. 1, pp. 271–280, 2001
2001
-
[36]
Saltelli, T
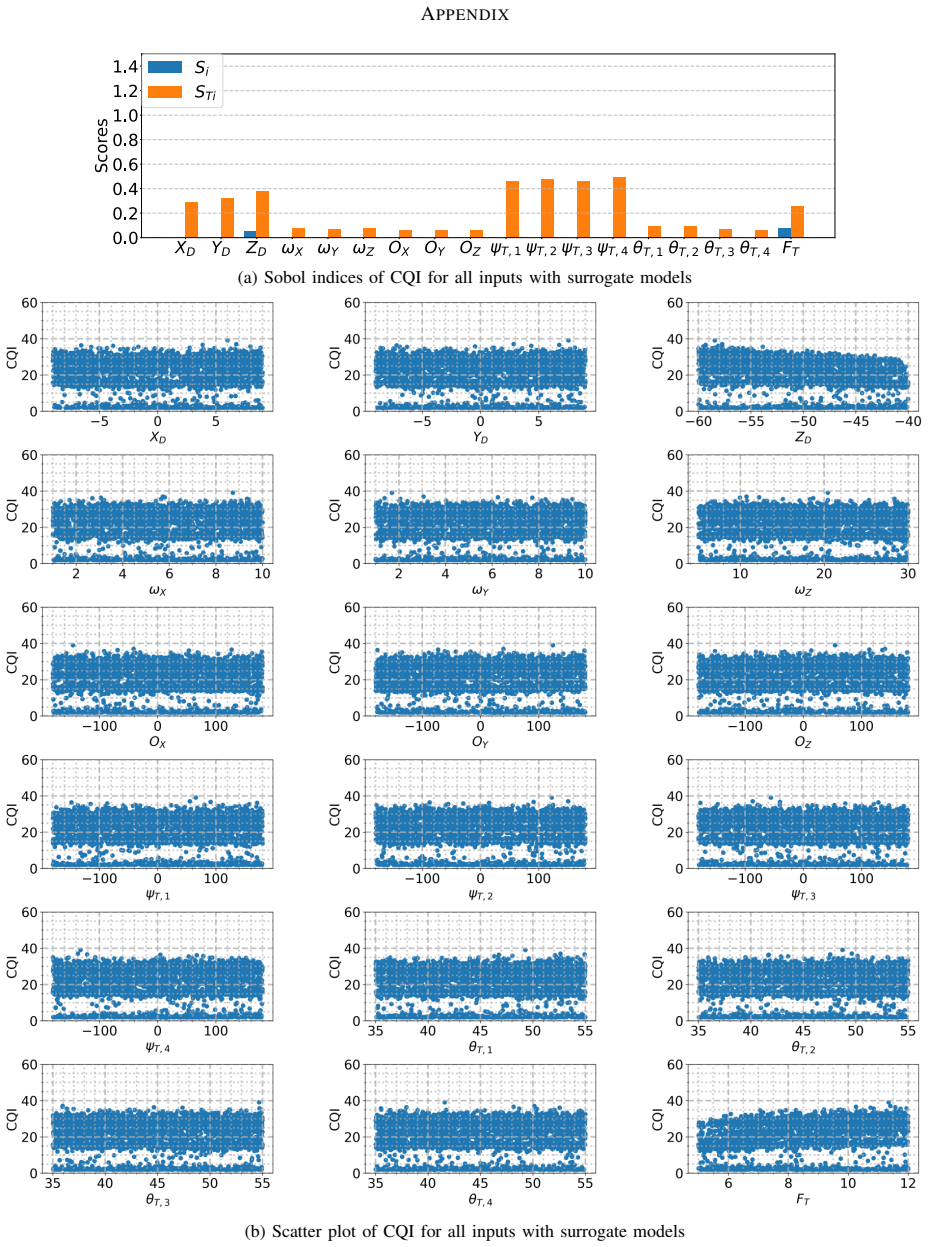
A. Saltelli, T. Andres, F. Campolongo, J. Cariboni, D. Gatelli, and M. Ratto,Global Sensitivity Analysis: The Primer, 1st ed. Newark: Wiley-Interscience, 2008. 13 APPENDIX (a) Sobol indices of CQI for all inputs with surrogate models (b) Scatter plot of CQI for all inputs with surrogate models Fig. 11: Sobol indices and scatter plots of CQI for all inputs...
2008
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.