A Geometry-Aware Triplane Field Network for Vehicle Aerodynamic Prediction
Pith reviewed 2026-06-27 22:40 UTC · model grok-4.3
The pith
GTF-Net builds triplane features from vehicle surface points and processes them with a dual-stream AFNO-CNN backbone plus explicit geometric encodings to predict pressure and wall shear stress more accurately than prior baselines.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
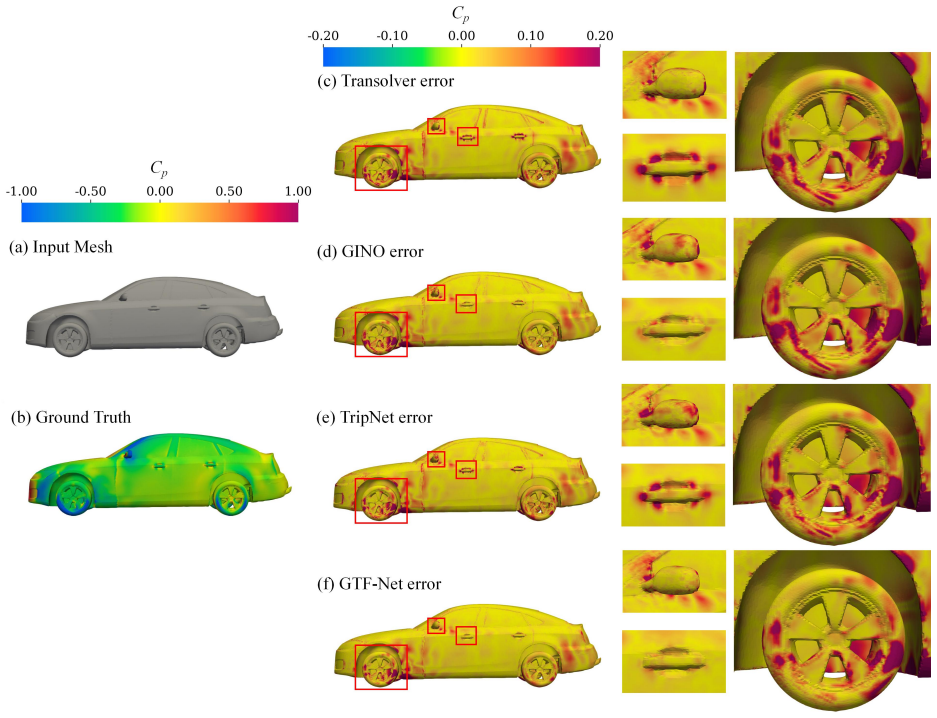
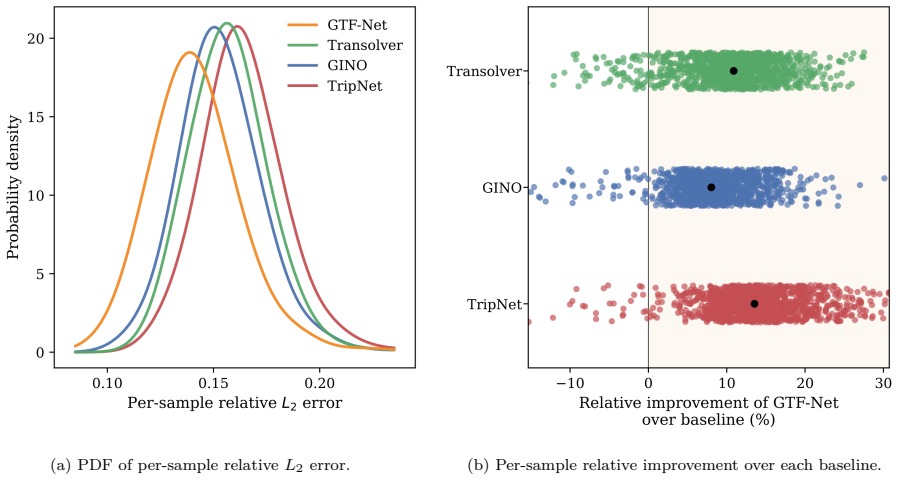
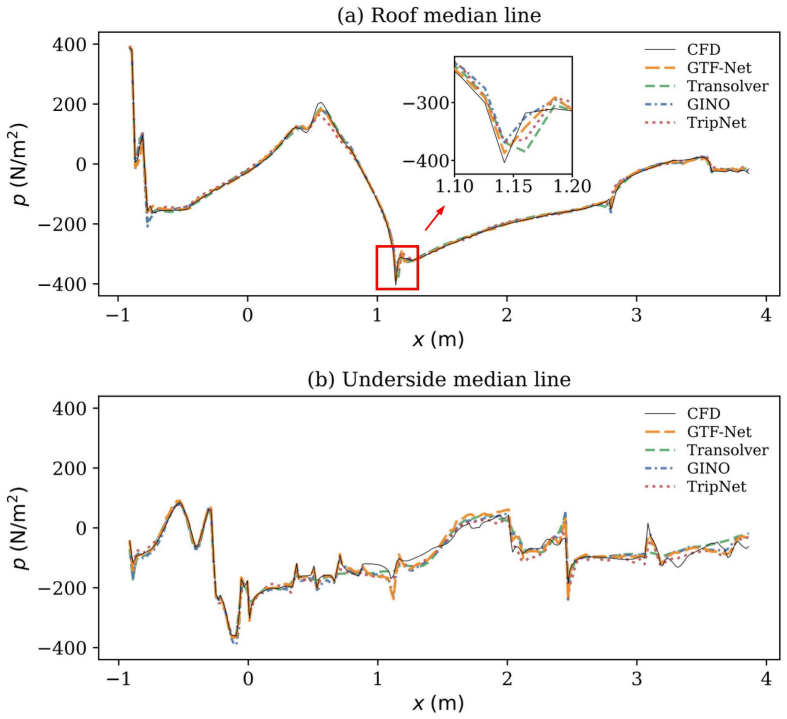
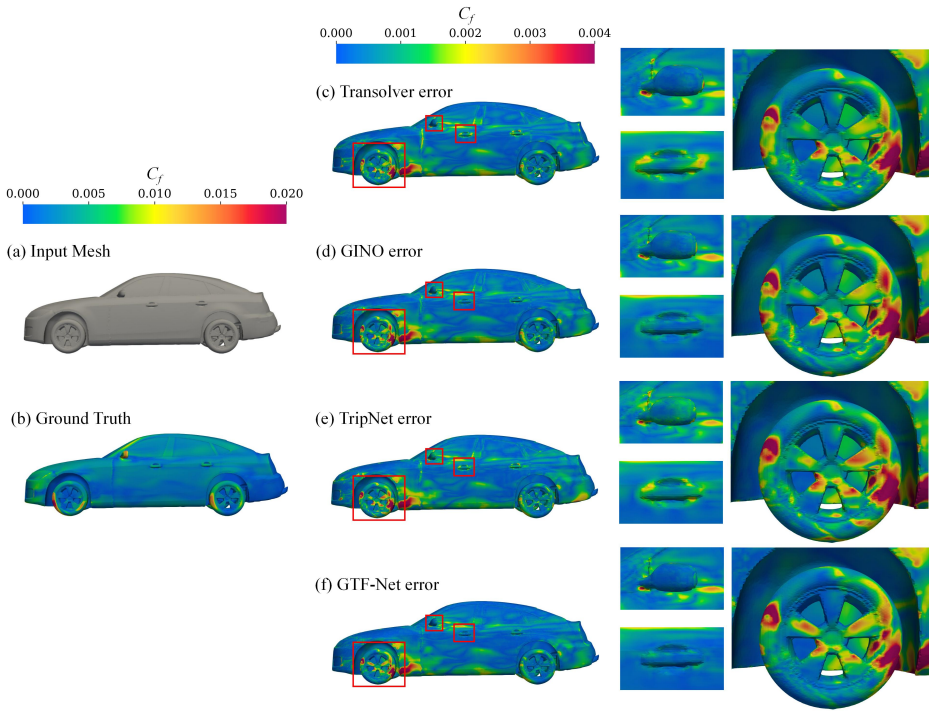
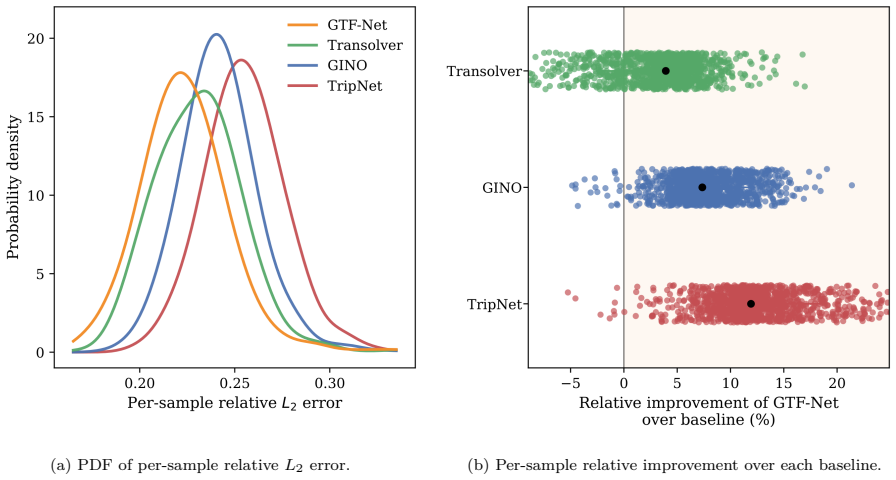
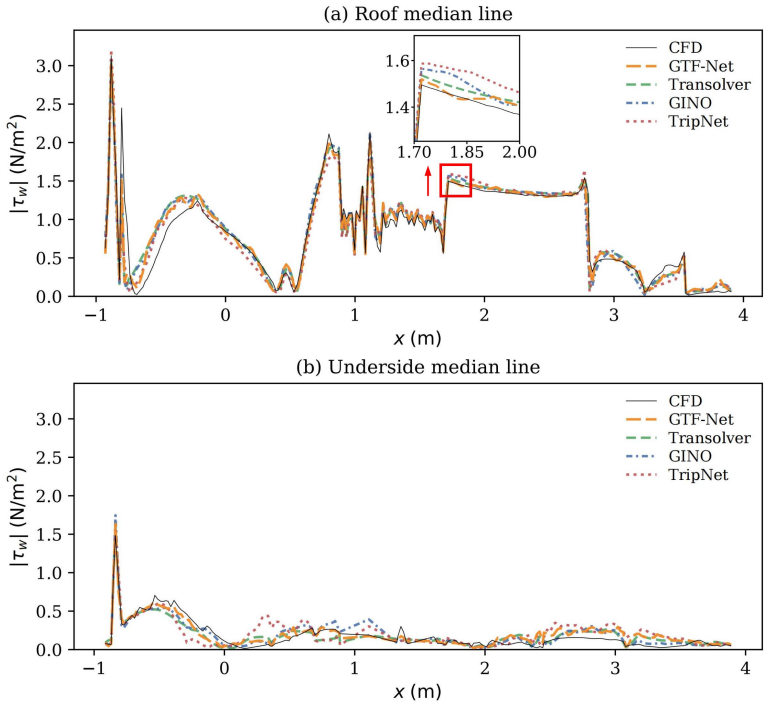
Constructing triplane features directly from sampled surface points through a shared MLP and smooth bilinear rasterization, then processing the planes with a dual-stream AFNO-CNN backbone and augmenting queries with vehicle-aligned directional coordinates, normal-projection features, and voxel-based curvature, produces surface pressure and wall shear stress predictions whose relative L2 errors are 0.145 and 0.226 respectively, lower than the strongest baseline values of 0.157 and 0.237.
What carries the argument
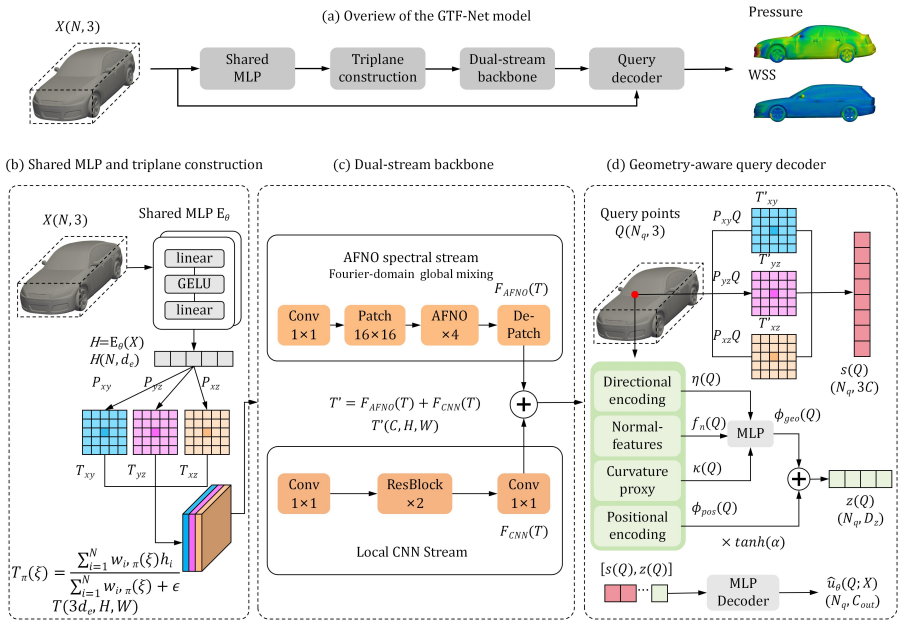
The geometry-aware triplane field network (GTF-Net) that constructs triplane features from surface points via shared MLP and rasterization, processes them with dual-stream AFNO spectral mixing plus CNN refinement, and augments queries with directional, normal-projection, and curvature encodings.
If this is right
- Pressure prediction reaches a relative L2 error of 0.145 versus 0.157 for the best prior method.
- Wall shear stress prediction reaches a relative L2 error of 0.226 versus 0.237 for the best prior method.
- Ablation tests show that AFNO spectral mixing, local CNN refinement, and query-side geometric encoding each contribute to the accuracy improvement.
- The structured triplane representation combined with explicit aerodynamic geometry cues supports accurate surface-field prediction without requiring full volumetric simulation.
Where Pith is reading between the lines
- The same triplane-plus-geometry encoding pattern could be tested on non-vehicle surfaces such as aircraft or wind-turbine blades to check transferability.
- If the method scales, it could be inserted into shape-optimization loops that currently rely on repeated CFD runs.
- The dual-stream backbone might be adapted to other surface-governed physics problems such as structural stress or heat flux prediction.
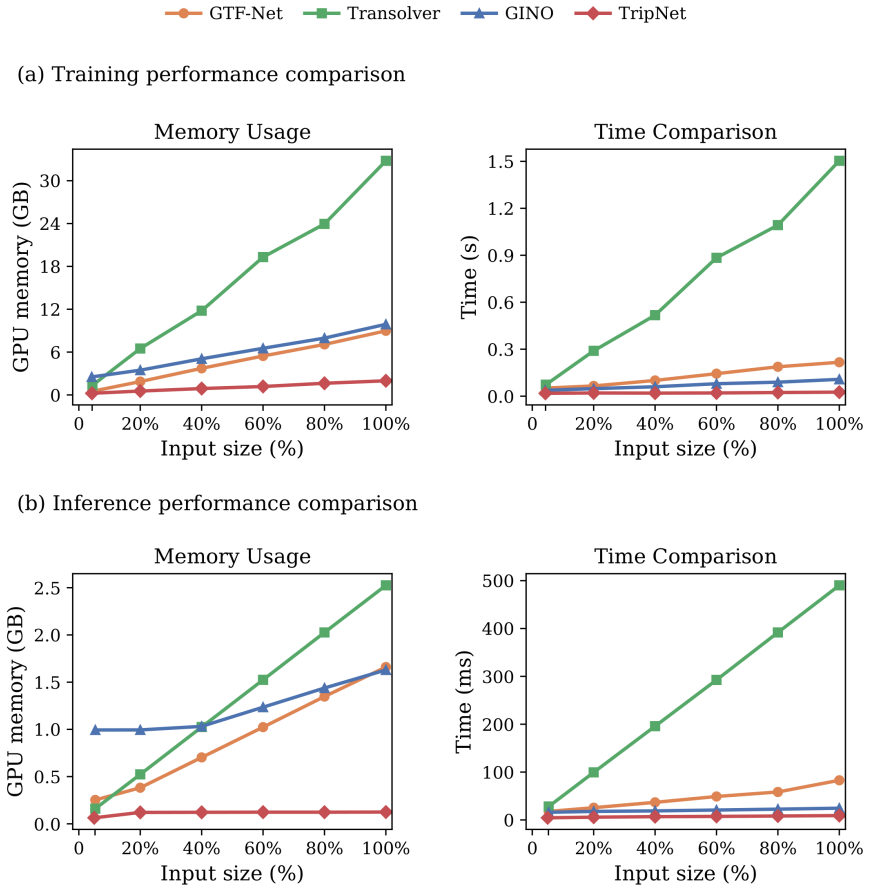
- Further work could measure wall-clock speedup against full CFD on identical hardware to quantify the practical design-cycle gain.
Load-bearing premise
The combination of shared-MLP triplane construction, dual-stream AFNO-CNN backbone, and query-time geometric encodings is sufficient to capture both global aerodynamic coupling and local geometry effects without full 3D volumetric input or explicit flow physics.
What would settle it
An experiment on an unseen vehicle shape in which the relative L2 error for pressure or wall shear stress fails to improve over the strongest baseline or in which removing any one of the three components (AFNO mixing, CNN refinement, or geometric encodings) produces no measurable accuracy drop.
Figures
read the original abstract
High-fidelity computational fluid dynamics (CFD) is crucial to vehicle aerodynamic analysis, but its cost still constrains early-stage design exploration. Machine-learning-based surface-field prediction offers a faster alternative if the model can efficiently capture both global flow context and local geometric detail. This work proposes a machine-learning-based method, named the geometry-aware triplane field network (GTF-Net), for vehicle aerodynamic pressure and wall shear stress prediction. GTF-Net constructs triplane features directly from sampled surface points through a shared multilayer perceptron (MLP) and smooth bilinear rasterization. The planes are then processed by a dual-stream backbone that combines adaptive Fourier neural operator (AFNO) spectral mixing with convolutional neural network (CNN) refinement, so long-range aerodynamic coupling and local geometry-induced variations are modeled in the same representation. At query stage, sampled triplane features are combined with vehicle-aligned directional coordinates, normal-projection features, and a voxel-based curvature proxy. GTF-Net is compared with Transolver, geometry-informed neural operator (GINO), and TripNet, a triplane-based surrogate model. GTF-Net improves the relative L2 error from the strongest baseline value of 0.157 to 0.145 for pressure prediction and from 0.237 to 0.226 for wall shear stress prediction. Ablation results show that AFNO mixing, local CNN refinement, and query-side geometric encoding each contribute to accuracy, supporting the proposed mechanism of combining structured triplane representation with explicit aerodynamic geometry cues.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes GTF-Net, a geometry-aware triplane field network for predicting aerodynamic pressure and wall shear stress on vehicle surfaces. Triplane features are constructed from sampled surface points via a shared MLP and bilinear rasterization, processed by a dual-stream AFNO-CNN backbone, and augmented at query time with directional coordinates, normal-projection features, and voxel curvature. The model is compared to Transolver, GINO, and TripNet, claiming relative L2 error reductions from 0.157 to 0.145 (pressure) and 0.237 to 0.226 (wall shear), with ablations indicating contributions from each architectural component.
Significance. If the reported gains prove robust under rigorous validation, the work would represent a modest incremental advance in structured surrogate modeling for vehicle aerodynamics, demonstrating that explicit geometric encodings can be combined with triplane representations to capture both global coupling and local effects without full 3D volumetric input. The ablation results provide some credit for isolating component contributions.
major comments (2)
- [Abstract] Abstract: The central claim of outperformance rests on small absolute reductions (0.012 and 0.011) in relative L2 error, yet no standard deviations across random seeds, number of training runs, dataset size, train/test split details, or statistical significance tests (e.g., paired t-test or bootstrap CI) are supplied; this directly undermines the ability to conclude that the differences exceed training stochasticity.
- [Abstract] Abstract: The evaluation description provides no explicit statement of held-out test data usage, cross-validation procedure, or error-bar analysis, which are load-bearing for interpreting the reported improvements over the strongest baseline.
minor comments (1)
- [Abstract] The abstract states that ablations show each component contributes but does not quantify the per-component error deltas or reference specific tables/figures for those results.
Simulated Author's Rebuttal
We thank the referee for highlighting the importance of statistical rigor and transparent evaluation protocols in assessing the reported performance gains. We address each major comment below and commit to revisions that strengthen the manuscript without altering its core contributions.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim of outperformance rests on small absolute reductions (0.012 and 0.011) in relative L2 error, yet no standard deviations across random seeds, number of training runs, dataset size, train/test split details, or statistical significance tests (e.g., paired t-test or bootstrap CI) are supplied; this directly undermines the ability to conclude that the differences exceed training stochasticity.
Authors: We agree that the absolute improvements are modest and that the lack of variability measures and formal statistical tests weakens the ability to attribute gains to the proposed architecture rather than training stochasticity. In the revised manuscript we will rerun training with at least five independent random seeds, report mean and standard deviation of relative L2 errors for both pressure and wall shear stress, explicitly state the full dataset size and the precise train/test split ratios used, and add paired t-tests (or bootstrap confidence intervals) comparing GTF-Net against the strongest baseline to establish statistical significance. revision: yes
-
Referee: [Abstract] Abstract: The evaluation description provides no explicit statement of held-out test data usage, cross-validation procedure, or error-bar analysis, which are load-bearing for interpreting the reported improvements over the strongest baseline.
Authors: We acknowledge that the current abstract and evaluation section do not explicitly describe the test-set protocol or error-bar methodology. The revised version will add a clear statement confirming that all reported numbers are computed on a strictly held-out test set never seen during training or hyper-parameter selection, will detail the exact train/test split (including any stratification by vehicle geometry), and will present error bars derived from the multiple random-seed runs described in the response to the first comment. revision: yes
Circularity Check
No circularity detected; empirical architecture evaluated on held-out data
full rationale
The paper proposes GTF-Net as an empirical neural architecture combining triplane features, AFNO-CNN backbone, and geometric encodings for surface field prediction. Reported improvements (relative L2 error reductions from 0.157 to 0.145 for pressure and 0.237 to 0.226 for shear) are presented as direct comparisons against external baselines (Transolver, GINO, TripNet) on test data, with ablations showing component contributions. No equations, self-definitional constructions, fitted-input-as-prediction steps, or load-bearing self-citations appear in the provided text. The derivation chain consists of standard ML design choices and empirical validation without reductions to inputs by construction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
C. Rao, H. Sun, Y. Liu, Physics-informed deep learning for incompressible laminar flows, Theoretical & Applied Mechanics Letters 10 (3) (2020) 207–212
2020
-
[2]
Zhang, Y
H. Zhang, Y. Shen, W. Huang, Z. Xie, Y.-B. Niu, Deep transfer learning for three-dimensional aerody- namic pressure prediction under data scarcity, Theoretical & Applied Mechanics Letters 15 (2) (2025) 100571
2025
-
[3]
L. Lu, P. Jin, G. Pang, Z. Zhang, G. E. Karniadakis, Learning nonlinear operators via DeepONet based on the universal approximation theorem of operators, Nature Machine Intelligence 3 (2021) 218–229
2021
-
[4]
Z. Li, N. B. Kovachki, K. Azizzadenesheli, B. Liu, K. Bhattacharya, A. Stuart, A. Anandkumar, Fourier Neural Operator for parametric partial differential equations, International Conference on Learning Representations (2021)
2021
-
[5]
H. Wu, H. Luo, H. Wang, J. Wang, M. Long, Transolver: A fast transformer solver for PDEs on general geometries, in: Proceedings of the 41st International Conference on Machine Learning, Vol. 235 of Proceedings of Machine Learning Research, PMLR, 2024, pp. 53681–53705
2024
-
[6]
H. Yang, J. Gu, Y. Chen, Y. Bin, J. Wang, S. Chen, Spatially-aware transformer operator for real-time aerodynamic evaluations of arbitrary three-dimensional vehicles, Journal of Computational Physics 545 (2026) 114456
2026
-
[7]
H. Luo, H. Wu, H. Zhou, L. Xing, Y. Di, J. Wang, M. Long, Transolver++: An accurate neural solver for PDEs on million-scale geometries (2025)
2025
-
[8]
C. Zeng, Y. Zhang, J. Zhou, Y. Wang, Z. Wang, Y. Liu, L. Wu, D. Z. Huang, Point Cloud Neural Operator for parametric PDEs on complex and variable geometries, Computer Methods in Applied Mechanics and Engineering 443 (2025) 118022
2025
-
[9]
Q. Wang, C. Wang, M. Zhang, J. Sun, P. Yang, S. Tang, S. Xiang, MNO: Multiscale neural operator for computational fluid dynamics with 3D point cloud data (2025)
2025
-
[10]
P. Zeng, G. Wang, H. Gu, X. Hu, T. Gao, Z. Wang, A. Yang, X. Song, LRQ-solver: A transformer-based neural operator for fast and accurate solving of large-scale 3D PDEs (2025)
2025
-
[11]
Elrefaie, A
M. Elrefaie, A. Dai, F. Ahmed, DrivAerNet: A parametric car dataset for data-driven aerodynamic design and prediction, Journal of Mechanical Design 147 (4) (2025) 041712
2025
-
[12]
Elrefaie, F
M. Elrefaie, F. Morar, A. Dai, F. Ahmed, DrivAerNet++: A large-scale multimodal car dataset with computational fluid dynamics simulations and deep learning benchmarks, Advances in Neural Information Processing Systems (2024)
2024
- [13]
-
[14]
Umetani, B
N. Umetani, B. Bickel, Learning three-dimensional flow for interactive aerodynamic design, ACM Transactions on Graphics 37 (4) (2018) 89:1–89:10. 26
2018
-
[15]
Alkin, M
B. Alkin, M. Bleeker, R. Kurle, T. Kronlachner, R. Sonnleitner, M. Dorfer, J. Brandstetter, AB-UPT: Scaling neural CFD surrogates for high-fidelity automotive aerodynamics simulations via anchored- branched universal physics transformers, Transactions on Machine Learning Research (2025)
2025
-
[16]
C. Choy, A. Kamenev, J. Kossaifi, M. Rietmann, J. Kautz, K. Azizzadenesheli, Factorized implicit global convolution for automotive computational fluid dynamics prediction (2025)
2025
-
[17]
P. Liu, P. Wang, X. Ren, H. Yuan, Z. Hao, C. Xu, S. Cai, D. Ni, AeroGTO: An efficient graph- transformer operator for learning large-scale aerodynamics of 3D vehicle geometries, in: Proceedings of the AAAI Conference on Artificial Intelligence, Vol. 39, 2025, pp. 18924–18932
2025
-
[18]
Y. Liu, Y. Chen, DragSolver: A multi-scale transformer for real-world automotive drag coefficient estimation, in: Proceedings of the 42nd International Conference on Machine Learning, Vol. 267 of Proceedings of Machine Learning Research, PMLR, 2025, pp. 38102–38118
2025
-
[19]
J. Gu, Y. Chen, Y. Bin, S. Chen, GeoFormer: Mesh-free geometry-to-flow alignment framework for real-time aerodynamics on non-watertight vehicle geometries, Physics of Fluids 38 (1) (2026) 015153, available at SSRN 5601950
2026
-
[20]
Y. Liu, Y. Chen, Y. Bin, S. Chen, EMOS: Efficient multi-output aerodynamic surrogates for rapid vehicle design iteration, in: Proceedings of the IEEE International Conference on Multimedia and Expo, 2026, in press
2026
-
[21]
Y. Liu, S. Liu, H. Yang, J. Gu, W. Fan, Z. Yang, D. Wang, S. Chen, Z. Jiang, Y. Bin, S. Chen, Y. Chen, AeroAgent: A vision–physics–decision framework for aerodynamic vehicle design, in: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2026, in press
2026
-
[22]
S. J. Jacob, M. Mrosek, C. Othmer, H. Köstler, Deep learning for real-time aerodynamic evaluations of arbitrary vehicle shapes (2021)
2021
-
[23]
F. Chen, K. Akasaka, 3D flow field estimation around a vehicle using convolutional neural networks, in: Proceedings of the British Machine Vision Conference, 2021
2021
-
[24]
Garcia-Fernandez, K
R. Garcia-Fernandez, K. Portal-Porras, O. Irigaray, Z. Ansa, U. Fernandez-Gamiz, CNN-based flow field prediction for bus aerodynamics analysis, Scientific Reports 13 (2023) 21213
2023
-
[25]
C. R. Qi, H. Su, K. Mo, L. J. Guibas, PointNet: Deep learning on point sets for 3D classification and segmentation, in: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2017, pp. 652–660
2017
-
[26]
C. R. Qi, L. Yi, H. Su, L. J. Guibas, PointNet++: Deep hierarchical feature learning on point sets in a metric space, in: Advances in Neural Information Processing Systems, 2017, pp. 5099–5108
2017
-
[27]
G. Qian, Y. Li, H. Peng, J. Mai, H. Hammoud, M. Elhoseiny, B. Ghanem, PointNeXt: Revisiting PointNet++ with improved training and scaling strategies, Advances in Neural Information Processing Systems (2022)
2022
-
[28]
16259–16268
H.Zhao, L.Jiang, J.Jia, P.H.S.Torr, V.Koltun, PointTransformer, in: ProceedingsoftheIEEE/CVF International Conference on Computer Vision, 2021, pp. 16259–16268
2021
-
[29]
Pfaff, M
T. Pfaff, M. Fortunato, A. Sanchez-Gonzalez, P. W. Battaglia, Learning mesh-based simulation with graph networks, International Conference on Learning Representations (2021)
2021
-
[30]
Z. Li, D. Z. Huang, B. Liu, A. Anandkumar, Fourier Neural Operator with learned deformations for PDEs on general geometries, Journal of Machine Learning Research 24 (388) (2023) 1–26. 27
2023
- [31]
-
[32]
G. Catalani, S. Agarwal, X. Bertrand, F. Tost, M. Bauerheim, J. Morlier, Aero-NeF: Neural fields for rapid aircraft aerodynamics simulations, arXiv preprint arXiv:2407.19916 (2024)
-
[33]
E. R. Chan, C. Z. Lin, M. A. Chan, K. Nagano, B. Pan, S. D. Mello, O. Gallo, L. Guibas, J. Tremblay, S. Khamis, T. Karras, G. Wetzstein, Efficient geometry-aware 3D generative adversarial networks, in: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022, pp. 16123–16133
2022
-
[34]
Q. Chen, M. Elrefaie, A. Dai, F. Ahmed, TripNet: Learning large-scale high-fidelity 3D car aerody- namics with triplane networks, arXiv preprint arXiv:2503.17400 (2025)
work page internal anchor Pith review Pith/arXiv arXiv 2025
- [35]
-
[36]
S. B. Pope, Turbulent Flows, Cambridge University Press, 2000
2000
-
[37]
F. R. Menter, Two-equation eddy-viscosity turbulence models for engineering applications, AIAA Jour- nal 32 (8) (1994) 1598–1605
1994
-
[38]
J. H. Ferziger, M. Perić, Computational Methods for Fluid Dynamics, 3rd Edition, Springer, 2002
2002
-
[39]
Pedregosa, G
F. Pedregosa, G. Varoquaux, A. Gramfort, V. Michel, B. Thirion, O. Grisel, M. Blondel, P. Pret- tenhofer, R. Weiss, V. Dubourg, J. Vanderplas, A. Passos, D. Cournapeau, M. Brucher, M. Perrot, É. Duchesnay, Scikit-learn: Machine learning in Python, Journal of Machine Learning Research 12 (2011) 2825–2830. 28
2011
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.