Think Before You Act: Intention-Guided Reasoning for LLM-Based Location Prediction
Pith reviewed 2026-06-27 19:51 UTC · model grok-4.3
The pith
Next POI prediction improves when models first infer a user's traveling intention before choosing specific locations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
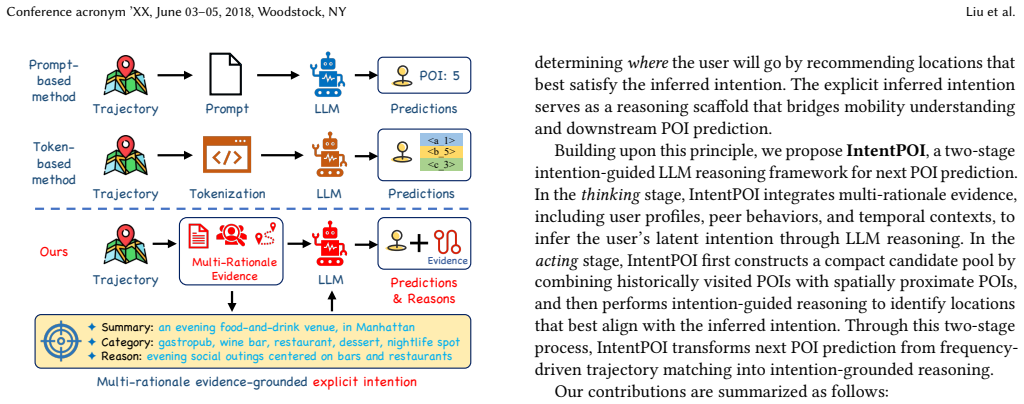
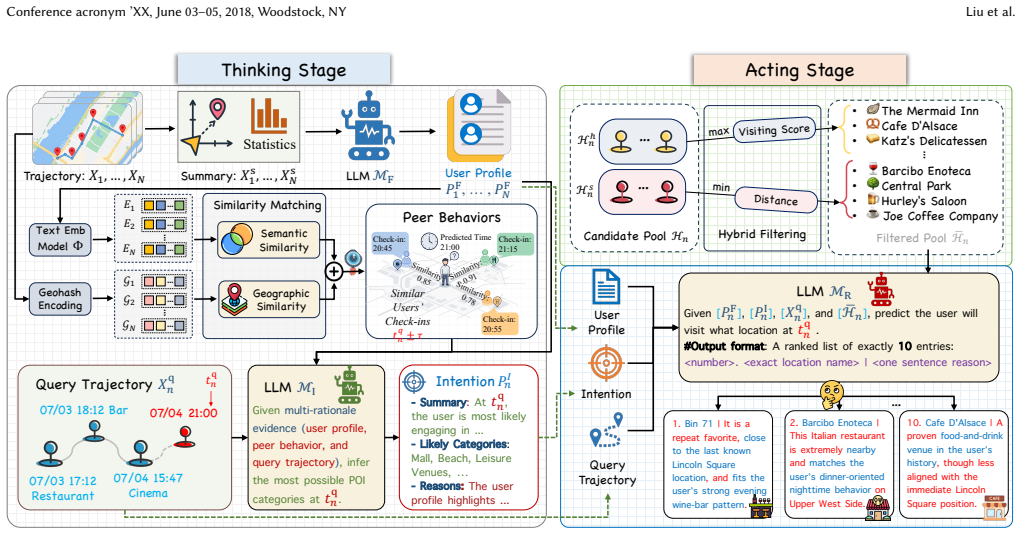
By explicitly decoupling intention inference from location prediction, IntentPOI transforms the next POI prediction from direct trajectory matching into intention-guided reasoning, where a thinking stage infers intermediate intentions from mobility patterns, peer behaviors, and temporal contexts, and an acting stage constructs a compact candidate pool before performing intention-aligned selection.
What carries the argument
The two-stage intention-guided reasoning framework that separates inference of traveling intentions from final POI selection.
If this is right
- Predictions become less driven by historical visit frequency and more aligned with inferred goals.
- Peer mobility patterns and temporal context are used explicitly during intention formation rather than only at final selection.
- A compact candidate pool is generated before reasoning, reducing the search space for the final choice.
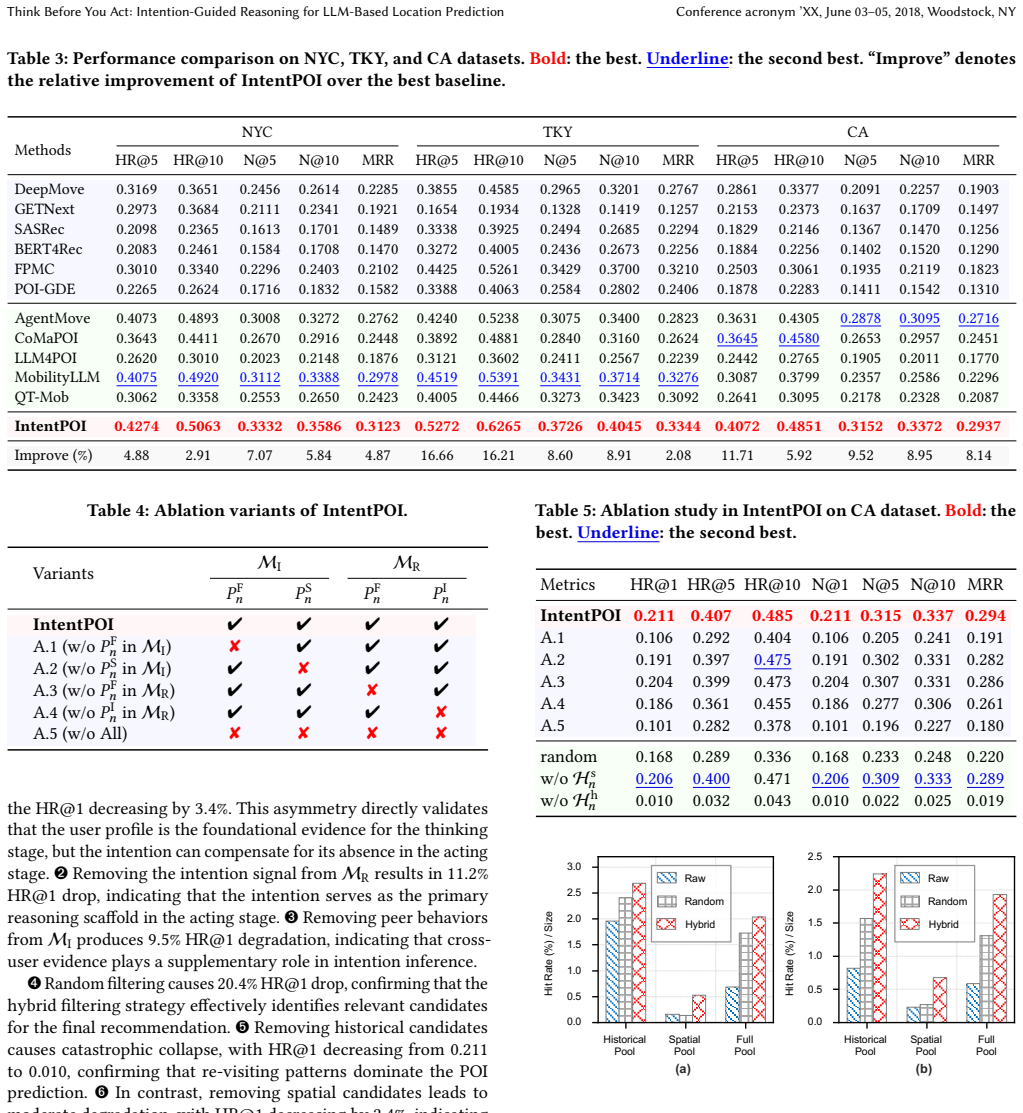
- The overall method outperforms eleven one-step baselines on three real-world check-in datasets.
Where Pith is reading between the lines
- The same two-stage separation could be tested on other sequential tasks where an intermediate goal precedes the concrete action.
- If the inferred intentions prove accurate, they could be exposed to users to increase recommendation transparency.
- Datasets that record explicit user intentions alongside check-ins would allow direct measurement of the intention-inference stage.
Load-bearing premise
Users form a distinct traveling intention before selecting any specific location rather than choosing locations directly from past patterns.
What would settle it
A controlled experiment on the same three datasets that removes the intention inference stage and measures whether accuracy stays the same or increases.
Figures
read the original abstract
Predicting a user's next Point-of-Interest (POI) based on their historical check-in records is a fundamental task in location-based services. While recent methods incorporating large language models have shown strong reasoning capabilities and promising results, they typically formulate the prediction task as a one-step trajectory-to-location mapping problem, making predictions prone to shallow trajectory correlations and historical frequency bias. We argue that users rarely choose locations directly and instead, they usually first form a traveling intention and then accordingly select specific POIs. Motivated by this insight, we propose IntentPOI, a two-stage intention-guided reasoning framework. In the thinking stage, we infer users' intermediate intentions by incorporating historical mobility patterns, similar peer behaviors, and the temporal contexts. In the acting stage, we first construct a compact candidate pool, and then perform intention-guided reasoning to identify locations that best align with the inferred intention. By explicitly decoupling intention inference from location prediction, IntentPOI transforms the next POI prediction from direct trajectory matching into intention-guided reasoning. Extensive experiments on three real-world datasets demonstrate that IntentPOI consistently outperforms eleven state-of-the-art baselines.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes IntentPOI, a two-stage LLM-based framework for next POI prediction. In the thinking stage, it infers intermediate user intentions from historical mobility patterns, similar peer behaviors, and temporal contexts. In the acting stage, it constructs a compact candidate pool and performs intention-guided reasoning to select locations aligned with the inferred intention. The central claim is that explicitly decoupling intention inference from location prediction transforms the task from direct trajectory matching into intention-guided reasoning, yielding consistent outperformance over eleven baselines on three real-world datasets.
Significance. If the empirical results hold with adequate controls, the explicit two-stage intention modeling offers a plausible way to mitigate shallow trajectory correlations and frequency bias in LLM-based POI prediction, potentially generalizing to other sequential decision tasks.
major comments (1)
- [Experiments] Experiments section: The abstract asserts consistent outperformance on three datasets against eleven baselines, but provides no details on experimental controls, error bars, statistical significance testing, baseline re-implementation choices, or potential post-hoc analysis; this absence makes the central empirical claim difficult to evaluate and is load-bearing for the paper's contribution.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We agree that the Experiments section requires additional details to allow proper evaluation of the empirical claims, and we will revise accordingly.
read point-by-point responses
-
Referee: [Experiments] Experiments section: The abstract asserts consistent outperformance on three datasets against eleven baselines, but provides no details on experimental controls, error bars, statistical significance testing, baseline re-implementation choices, or potential post-hoc analysis; this absence makes the central empirical claim difficult to evaluate and is load-bearing for the paper's contribution.
Authors: We agree that these details are essential for rigorous evaluation. In the revised manuscript, we will expand the Experiments section (and associated appendix) to explicitly document: (1) experimental controls including data split ratios, random seeds, hyperparameter settings, and preprocessing steps; (2) error bars computed from at least five independent runs with different seeds; (3) statistical significance testing (e.g., paired t-tests or Wilcoxon signed-rank tests with reported p-values against each baseline); (4) baseline re-implementation details, specifying which baselines used official code versus our re-implementations under identical settings and hardware; and (5) any post-hoc analyses such as ablation studies on the two-stage components and error-case breakdowns. These additions will be presented without changing the reported performance numbers or core claims. revision: yes
Circularity Check
No significant circularity
full rationale
The paper presents an architectural proposal (IntentPOI) consisting of a two-stage LLM-based framework that first infers intentions from mobility patterns, peer behaviors, and temporal context, then performs intention-guided selection from a candidate pool. No equations, parameter-fitting steps, or derivations are described that would reduce any claimed prediction or transformation to its own inputs by construction. The central claim—that explicit decoupling converts trajectory matching into intention-guided reasoning—is a direct consequence of the proposed method design rather than a self-referential loop, and is evaluated via standard empirical comparison on external datasets. No load-bearing self-citations, uniqueness theorems, or ansatzes imported from prior author work are invoked in the provided text.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Users form a traveling intention before selecting specific POIs
Reference graph
Works this paper leans on
-
[1]
Yile Chen, Weiming Huang, Kaiqi Zhao, Yue Jiang, and Gao Cong. 2025. Self- supervised representation learning for geospatial objects: A survey.Information Fusion123 (2025), 103265
2025
-
[2]
Yile Chen, Yicheng Tao, Yue Jiang, Shuai Liu, Han Yu, and Gao Cong. 2025. Enhancing large language models for mobility analytics with semantic location tokenization. InSIGKDD. 262–273
2025
-
[3]
Jiawei Cheng, Jingyuan Wang, Yichuan Zhang, Jiahao Ji, Yuanshao Zhu, Zhibo Zhang, and Xiangyu Zhao. 2025. Poi-enhancer: An llm-based semantic enhance- ment framework for poi representation learning. InAAAI, Vol. 39. 11509–11517
2025
-
[4]
Yizhou Dang, Enneng Yang, Guibing Guo, Linying Jiang, Xingwei Wang, Xiaoxiao Xu, Qinghui Sun, and Hong Liu. 2023. Uniform sequence better: Time interval aware data augmentation for sequential recommendation. InProceedings of the AAAI conference on artificial intelligence, Vol. 37. 4225–4232
2023
-
[5]
Jie Feng, Yuwei Du, Jie Zhao, and Yong Li. 2025. Agentmove: A large language model based agentic framework for zero-shot next location prediction. InPro- ceedings of the 2025 Conference of the Nations of the Americas Chapter of the Association for Computational Linguistics: Human Language Technologies (Volume 1: Long Papers). 1322–1338
2025
-
[6]
Jie Feng, Yong Li, Chao Zhang, Funing Sun, Fanchao Meng, Ang Guo, and Depeng Jin. 2018. Deepmove: Predicting human mobility with attentional recurrent networks. InProceedings of the 2018 world wide web conference. 1459–1468
2018
-
[7]
Jie Feng, Yong Li, Chao Zhang, Funing Sun, Fanchao Meng, Ang Guo, and Depeng Jin. 2018. Deepmove: Predicting human mobility with attentional recurrent networks. InThe world wide web conference. 1459–1468
2018
-
[8]
Shanshan Feng, Haoming Lyu, Fan Li, Zhu Sun, and Caishun Chen. 2024. Where to move next: Zero-shot generalization of llms for next poi recommendation. In CAI. IEEE, 1530–1535
2024
-
[9]
Qiang Gao, Fan Zhou, Goce Trajcevski, Kunpeng Zhang, Ting Zhong, and Fengli Zhang. 2019. Predicting human mobility via variational attention. InThe world wide web conference. 2750–2756
2019
-
[11]
Letian Gong, Yan Lin, Xinyue Zhang, Yiwen Lu, Xuedi Han, Yichen Liu, Shengnan Guo, Youfang Lin, and Huaiyu Wan. 2024. Mobility-llm: Learning visiting inten- tions and travel preference from human mobility data with large language models. Advances in Neural Information Processing Systems37 (2024), 36185–36217
2024
-
[12]
Nan Jiang, Haitao Yuan, Jianing Si, Minxiao Chen, and Shangguang Wang. 2024. Towards effective next POI prediction: Spatial and semantic augmentation with remote sensing data. InICDE. IEEE, 5061–5074
2024
-
[13]
Wang-Cheng Kang and Julian McAuley. 2018. Self-Attentive Sequential Recom- mendation. InICDM. 197–206
2018
-
[14]
Yantong Lai, Yijun Su, Lingwei Wei, Tianqi He, Haitao Wang, Gaode Chen, Daren Zha, Qiang Liu, and Xingxing Wang. 2024. Disentangled contrastive hypergraph learning for next POI recommendation. InProceedings of the 47th international ACM SIGIR conference on research and development in information retrieval. 1452– 1462
2024
-
[15]
Peibo Li, Maarten de Rijke, Hao Xue, Shuang Ao, Yang Song, and Flora D Salim
-
[16]
Large language models for next point-of-interest recommendation. InSIGIR. 1463–1472
- [17]
-
[19]
Nicholas Lim, Bryan Hooi, See-Kiong Ng, Xueou Wang, Yong Liang Goh, Ren- rong Weng, and Jagannadan Varadarajan. 2020. STP-UDGAT: Spatial-temporal- preference user dimensional graph attention network for next POI recommenda- tion. InProceedings of the 29th ACM International conference on information & knowledge management. 845–854
2020
-
[20]
Massimiliano Luca, Gianni Barlacchi, Bruno Lepri, and Luca Pappalardo. 2021. A survey on deep learning for human mobility.ACM Computing Surveys (CSUR) 55, 1 (2021), 1–44
2021
-
[21]
Yingtao Luo, Qiang Liu, and Zhaocheng Liu. 2021. Stan: Spatio-temporal attention network for next location recommendation. InProceedings of the web conference
2021
-
[22]
Dongyi Lv, Qiuyu Ding, Heng-Da Xu, Zhaoxu Sun, Zhi Wang, Feng Xiong, and Mu Xu. 2026. Reasoning Over Space: Enabling Geographic Reasoning for LLM- Based Generative Next POI Recommendation.arXiv preprint arXiv:2601.04562 (2026)
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[23]
Gustavo Niemeyer. 2008. Geohash. http://geohash.org
2008
-
[24]
Xuan Rao, Lisi Chen, Yong Liu, Shuo Shang, Bin Yao, and Peng Han. 2022. Graph- flashback network for next location recommendation. InProceedings of the 28th ACM SIGKDD conference on knowledge discovery and data mining. 1463–1471
2022
-
[25]
Xuan Rao, Renhe Jiang, Shuo Shang, Lisi Chen, Peng Han, Bin Yao, and Panos Kal- nis. 2024. Next point-of-interest recommendation with adaptive graph contrastive learning.TKDE37, 3 (2024), 1366–1379
2024
-
[26]
Steffen Rendle, Christoph Freudenthaler, and Lars Schmidt-Thieme. 2010. Factor- izing personalized markov chains for next-basket recommendation. InProceedings of the 19th international conference on World wide web. 811–820
2010
-
[27]
Pablo Sánchez and Alejandro Bellogín. 2022. Point-of-Interest Recommender Systems Based on Location-Based Social Networks: A Survey from an Experi- mental Perspective.ACM Comput. Surv.54, 11s, Article 223 (Sept. 2022), 37 pages. doi:10.1145/3510409
-
[28]
Fei Sun, Jun Liu, Jian Wu, Changhua Pei, Xiao Lin, Wenwu Ou, and Peng Jiang
-
[29]
BERT4Rec: Sequential Recommendation with Bidirectional Encoder Repre- sentations from Transformer. InCIKM. 1441–1450
-
[30]
Tianao Sun, Meng Chen, Bowen Zhang, Genan Dai, Weiming Huang, and Kai Zhao. 2025. SILO: Semantic Integration for Location Prediction with Large Language Models. InSIGKDD. 2756–2767
2025
-
[31]
Tianao Sun, Ke Fu, Weiming Huang, Kai Zhao, Yongshun Gong, and Meng Chen. 2024. Going where, by whom, and at what time: Next location prediction considering user preference and temporal regularity. InProceedings of the 30th ACM SIGKDD Conference on Knowledge Discovery and Data Mining. 2784–2793
2024
-
[32]
Juntao Tan, Shuyuan Xu, Wenyue Hua, Yingqiang Ge, Zelong Li, and Yongfeng Zhang. 2024. Idgenrec: Llm-recsys alignment with textual id learning. InProceed- ings of the 47th international ACM SIGIR conference on research and development in information retrieval. 355–364
2024
-
[33]
Dongsheng Wang, Yuxi Huang, Shen Gao, Yifan Wang, Chengrui Huang, and Shuo Shang. 2025. Generative Next POI Recommendation with Semantic ID. In SIGKDD. 2904–2914
2025
-
[34]
Tianxing Wang and Can Wang. 2024. Embracing LLMs for point-of-interest recommendations.IEEE Intelligent Systems39, 1 (2024), 56–59
2024
- [35]
-
[36]
Yuxia Wu, Ke Li, Guoshuai Zhao, and Xueming Qian. 2020. Personalized long-and short-term preference learning for next POI recommendation.IEEE Transactions on Knowledge and Data Engineering34, 4 (2020), 1944–1957
2020
-
[37]
Yuqian Wu, Yuhong Peng, Jiapeng Yu, and Raymond Lee. 2025. Mas4poi: a multi-agents collaboration system for next poi recommendation. InPacific-Asia Conference on Knowledge Discovery and Data Mining. Springer, 356–367
2025
- [38]
-
[39]
Hao Xue, Flora Salim, Yongli Ren, and Nuria Oliver. 2021. MobTCast: Leveraging auxiliary trajectory forecasting for human mobility prediction.NeurIPS34 (2021), 30380–30391
2021
-
[40]
Xiaodong Yan, Tengwei Song, Yifeng Jiao, Jianshan He, Jiaotuan Wang, Ruopeng Li, and Wei Chu. 2023. Spatio-temporal hypergraph learning for next POI recom- mendation. InSIGIR. 403–412
2023
-
[41]
Dingqi Yang, Benjamin Fankhauser, Paolo Rosso, and Philippe Cudre-Mauroux
-
[42]
Location prediction over sparse user mobility traces using rnns. InIJCAI. 2184–2190
-
[43]
Zheng, and Zhiyong Yu
Dingqi Yang, Daqing Zhang, Vincent W. Zheng, and Zhiyong Yu. 2014. Modeling User Activity Preference by Leveraging User Spatial Temporal Characteristics in LBSNs.IEEE Transactions on Systems, Man, and Cybernetics: Systems45, 1 (2014), 129–142
2014
-
[44]
Song Yang, Jiamou Liu, and Kaiqi Zhao. 2022. Getnext: trajectory flow map enhanced transformer for next poi recommendation. InProceedings of the 45th International ACM SIGIR Conference on research and development in information retrieval. 1144–1153
2022
-
[45]
Song Yang, Jiamou Liu, and Kaiqi Zhao. 2022. GETNext: Trajectory Flow Map Enhanced Transformer for Next POI Recommendation. InSIGIR. 1144–1153
2022
-
[46]
Yuxuan Yang, Siyuan Zhou, He Weng, Dongjing Wang, Xin Zhang, Dongjin Yu, and Shuiguang Deng. 2024. Siamese learning based on graph differential equation for Next-POI recommendation.Applied Soft Computing150 (2024), 111086
2024
-
[47]
Yuxuan Yang, Siyuan Zhou, He Weng, Dongjing Wang, Xin Zhang, Dongjin Yu, and Shuiguang Deng. 2024. Siamese Learning Based on Graph Differential Equation for Next-POI Recommendation.Applied Soft Computing150 (2024), 111086
2024
-
[48]
Feiyu Yin, Yong Liu, Zhiqi Shen, Lisi Chen, Shuo Shang, and Peng Han. 2023. Next POI recommendation with dynamic graph and explicit dependency. In Proceedings of the AAAI conference on artificial intelligence, Vol. 37. 4827–4834
2023
-
[49]
Quan Yuan, Gao Cong, Zongyang Ma, Aixin Sun, and Nadia Magnenat-Thalmann
-
[50]
Time-Aware Point-of-Interest Recommendation. InSIGIR. 363–372
-
[51]
Jun Zeng, Hongjin Tao, Haoran Tang, Junhao Wen, and Min Gao. 2025. Global and local hypergraph learning method with semantic enhancement for POI Conference acronym ’XX, June 03–05, 2018, Woodstock, NY Liu et al. recommendation.Information Processing & Management62, 1 (2025), 103868
2025
-
[52]
Pengpeng Zhao, Anjing Luo, Yanchi Liu, Jiajie Xu, Zhixu Li, Fuzhen Zhuang, Victor S Sheng, and Xiaofang Zhou. 2020. Where to go next: A spatio-temporal gated network for next poi recommendation.IEEE Transactions on Knowledge and Data Engineering34, 5 (2020), 2512–2524
2020
-
[53]
Lin Zhong, Lingzhi Wang, Xu Yang, and Qing Liao. 2025. Comapoi: A collabo- rative multi-agent framework for next poi prediction bridging the gap between trajectory and language. InSIGIR. 1768–1778. A Overall Process of IntentPOI The overall process of IntentPOI is presented in Algorithm 1, which consists of yielding user profiles and similarity matrix fro...
2025
-
[54]
Based on the following data about a Foursquare user inNew York City, write a comprehensive user profile (2-3 paragraphs, approximately 200 words)
Prompt inM F for user profiles System Prompt: You are a mobility analyst. Based on the following data about a Foursquare user inNew York City, write a comprehensive user profile (2-3 paragraphs, approximately 200 words). User Prompt: ## Statistical Summary The user with ID 1 has taken 6 trips in total. • The top hours and frequencies for this user are: 18...
2012
-
[55]
summary”, “likely_categories
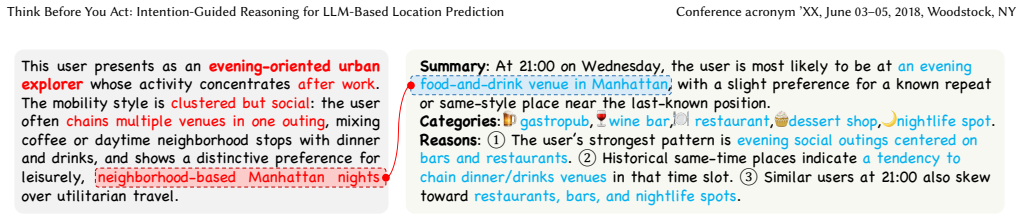
Prompt inM I for intention inference System Prompt: You predict where aNew York Cityuser is likely to be at a known future time. Return only JSON. User Prompt: ## User Profile This user presents as an evening-oriented urban explorer whose activity concentrates after work and into the night ... ## Temporal Contexts •17:12 on 2012-07-03: BLT Fish Shack (Ame...
2012
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.